Biringen S., Chow C.-Y. An Introduction to Computational Fluid Mechanics by Example
Подождите немного. Документ загружается.

52 INVISCID FLUID FLOWS
Furthermore, if the fluid is assumed incompressible, the velocity field must
also satisfy the continuity equation for such a fluid:
∇ · V = 0 (2.1.3)
Upon substitution from (2.1.2), (2.1.3) becomes
∇
2
φ = 0 (2.1.4)
where ∇
2
≡ ∇ · ∇ is the Laplacian operator, and (2.1.4) is called the Laplace
equation.
Using Prandtl’s postulation, the problem of an incompressible flow past a given
streamlined body at high Reynolds numbers is to be solved as follows. For the
external region a velocity potential is to be found by solving the Laplace equation
(2.1.4), which satisfies both the boundary condition prescribed far upstream and
the requirement that the fluid velocity be tangent to the body surface. The latter
condition is justified by the fact that the boundary layer around the body is thin.
The velocity distribution of the external flow along the body surface is then used
as the outer boundary condition for the boundary-layer flow. This inner flow
satisfies the no-slip condition at the rigid wall and is a solution to the governing
boundary-layer equations to be shown in the next chapter.
In the present chapter the boundary-layer flow is disregarded completely. Once
the velocity field in the external region is determined from the kinematic con-
siderations just described, the pressure field p can be computed from a dynamic
relation, called the Euler equation:
ρ
DV
Dt
=−∇p (2.1.5)
It is the equation of motion for inviscid fluids with body forces omitted. In this
equation ρ is the density, and the operator
D
Dt
≡
∂
∂t
+V ·∇ (2.1.6)
is the total or substantial derivative that gives the rate of change by following a
fluid particle.
It is easier to compute the pressure from the integrated form of the Euler
equation (i.e., the Bernoulli equation) than from the Euler equation itself. Under
the conditions of incompressible fluid and irrotational velocity field, the Bernoulli
equation has the form
ρ
∂φ
∂t
+p +
1
2
ρV
2
= H (2.1.7)
where the constant of integration, H ,istheBernoulli constant. For a steady flow,
(2.1.7) simply states that the sum of the hydrostatic pressure, p, and the dynamic
INCOMPRESSIBLE POTENTIAL FLOWS 53
pressure,
1
2
ρV
2
, is a constant at any point in the flow. In this case H is the
stagnation pressure, or the pressure measured at a point where the fluid velocity
vanishes.
For two-dimensional planar flows, (2.1.2) and (2.1.4) can be expressed in
Cartesian coordinates as
u =
∂φ
∂x
, υ =
∂φ
∂y
(2.1.8)
and
∂
2
φ
∂x
2
+
∂
2
φ
∂y
2
= 0 (2.1.9)
where u and υ are, respectively, the velocity components along the x and y axes.
In polar coordinates, however, they have the expressions
u
r
=
∂φ
∂r
, u
θ
=
1
r
∂φ
∂θ
(2.1.10)
and
∂
2
φ
∂r
2
+
1
r
∂φ
∂r
+
1
r
2
∂
2
φ
∂θ
2
= 0 (2.1.11)
where u
r
is the velocity component in the radial direction and u
θ
is the velocity
component in the azimuthal direction.
Instead of velocity potential, stream function is sometimes used for analyzing
planar or axisymmetric incompressible flows. The continuity equation (2.1.3)
suggests that the velocity vector can also be derived from a vector potential
through the relationship
V = ∇ × (i
z
ψ) (2.1.12)
where i
z
is a unit vector along the z axis, which is perpendicular to the plane of
fluid motion, and ψ is called the stream function, which represents the volume
of fluid passing per unit time between a given point and a reference streamline
(see, for example, Kuethe and Chow, 1998, Section 2.6). Streamlines,towhich
the instantaneous velocity vectors are tangent, are described by the equations
ψ = constant. In terms of stream function, the irrotationality relation (2.1.1)
becomes
∇ × ∇ ×(i
z
ψ) = 0 (2.1.13)
(2.1.12) and (2.1.13), when written in Cartesian coordinates, have the expressions
u =
∂ψ
∂y
, υ =−
∂ψ
∂x
(2.1.14)
∂
2
ψ
∂x
2
+
∂
2
ψ
∂y
2
= 0 (2.1.15)
54 INVISCID FLUID FLOWS
or, in polar coordinates, the expressions
u
r
=
1
r
∂ψ
∂θ
, u
θ
=−
∂ψ
∂r
(2.1.16)
∂
2
ψ
∂r
2
+
1
r
∂ψ
∂r
+
1
r
2
∂
2
ψ
∂θ
2
= 0 (2.1.17)
It turns out that, similar to the velocity potential, the stream function for planar
incompressible flows is also governed by the Laplace equation. However, the
nonsteady term in the Bernoulli equation cannot be written in terms of ψ in a
simple form similar to that shown in (2.1.7) in terms of φ.
The continuity equation (2.1.3) does not apply in regions where fluid mass is
created or destroyed. The formulation is now generalized to include the possi-
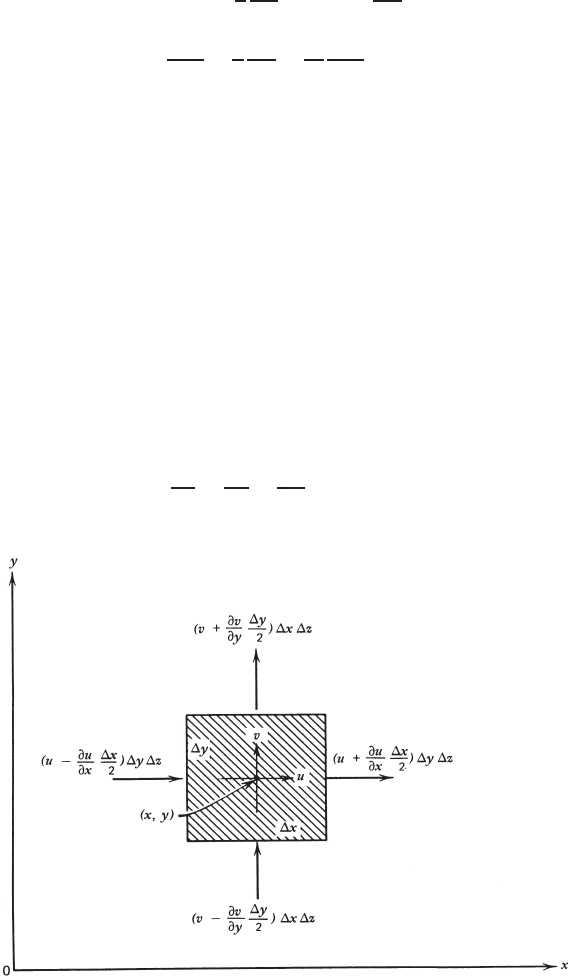
ble sources and sinks in the flow field. Consider an infinitesimal control volume
x y z fixed in the Cartesian coordinate system as sketched in Fig. 2.1.1, in
which the z dimension is not shown for the purpose of simplicity. The distribu-
tion of sources is represented by q(x, y, z, t), which is the volume of fluid created
per unit time from a unit volume located at the point (x, y, z ). A simple arith-
metic procedure computing the volume fluxes across the surfaces, as indicated
in Fig. 2.1.1 (the fluxes in the z direction can easily be added), shows that the
net volume of fluid flowing out of the control volume per unit time is
∂u
∂x
+
∂υ
∂y
+
∂w
∂z
x y z
FIGURE 2.1.1 Flow through a control volume.

NUMERICAL SOLUTION OF SECOND-ORDER ORDINARY DIFFERENTIAL EQUATIONS 55
For an incompressible fluid, this amount of fluid must be equal to qx y z,
or the amount produced by all the sources contained within the volume. Thus,
the resulting continuity equation is
∂u
∂x
+
∂υ
∂y
+
∂w
∂z
= q(x, y, z , t) (2.1.18)
or, in vector notation,
∇ · V = q (2.1.19)
Sinks are represented by negative values of q. In the absence of sources or sinks,
q = 0, and the continuity equation (2.1.3) is recovered.
When the velocity vector is expressed in terms of velocity potential, (2.1.19)
becomes
∇
2
φ = q (2.1.20)
whichisintheformofaPoisson equation.
Despite the fact that both Laplace and Poisson equations are linear, analytical
solution for flow past a body of arbitrary shape is by no means simple. Vari-
ous numerical and seminumerical solution techniques will be introduced in the
following sections.
An extensive discussion on potential flows is out of the scope of this book.
Such a task can be found in any introductory book on fluid dynamics.
2.2 NUMERICAL SOLUTION OF SECOND-ORDER ORDINARY
DIFFERENTIAL EQUATIONS: BOUNDARY-VALUE PROBLEMS
In connection with the numerical solution of ordinary differential equations, var-
ious initial-value problems were treated in Chapter 1. In another class of fluid
dynamic problems a solution is to be found that satisfies not only the differen-
tial equation throughout some domain of its independent variable, but also some
conditions on boundaries of that domain. These problems are called boundary-
value problems. We consider here the numerical solution of a linear second-order
ordinary differential equation of the form
d
2
f
dx
2
+A(x)
df
dx
+B(x)f = D(x) (2.2.1)
for the domain x
min
≤ x ≤ x
max
, subject to the boundary conditions that the values
of f are given at the end points of that range, at x = x
min
and x
max
. The method
developed here will be modified later for solving problems involving derivative
boundary conditions.
As the first step in our numerical method, the differential equation is to be
approximated by an equation of the finite-difference form. Similar to what was
done in solving the initial-value problems, the axis of the independent variable
is again subdivided into small intervals of constant width h. If the number of
intervals in the given range of x is n +1, and if the end points of the intervals
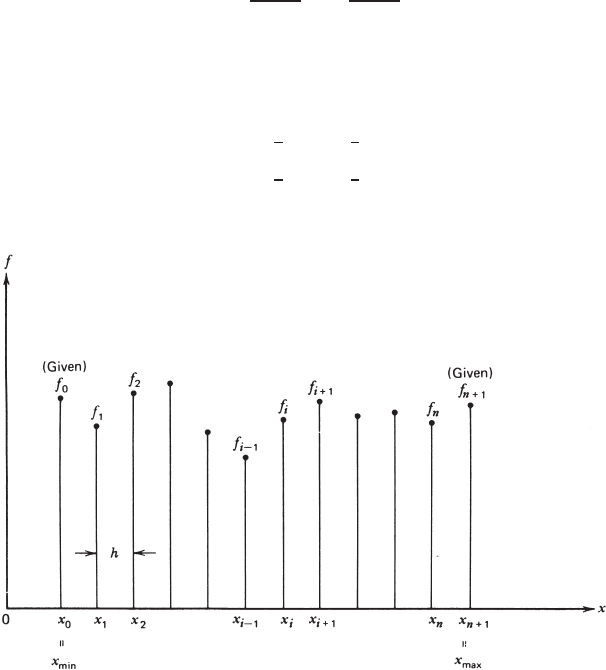
56 INVISCID FLUID FLOWS
are labeled according to the index notation shown in Fig. 2.2.1, starting with x
0
at the left end of the range, then the following relations hold:
x
i
= x
0
+ih, i = 0, 1, 2, ..., n +1 (2.2.2)
in which x
o
= x
min
and x
n+1
= x
max
. Values of the function f evaluated at these
end points are also named in index notation according to the definition f
i
≡ f (x
i
).
It is desired to approximate the derivatives of f at an arbitrary point x
i
by
expressions containing values of f evaluated in the neighborhood of x
i
.
Let x
j
be such a neighboring point with j = i +m,wherem is a positive
or negative integer. For small values of h the function evaluated at x
i
may be
expanded in a Taylor’s series about x
i
:
f
j
≡ f (x
i
+mh)
= f
i
+mhf
i
+
(mh)
2
2!
f
i
+
(mh)
3
3!
f
i
+··· (2.2.3)
where a prime denotes a differentiation with respect to x. By assigning the values
−1and+1tom in (2.2.3), we obtain two expressions for f (x) at immediate
neighboring points of x
i
.
f
i−1
= f
i
−hf
i
+
1
2
h
2
f
i
−
1
6
h
3
f
i
+··· (2.2.4)
f
i+1
= f
i
+hf
i
+
1
2
h
2
f
i
+
1
6
h
3
f
i
+··· (2.2.5)
FIGURE 2.2.1 Numerical solution of an ordinary boundary-value problem.
NUMERICAL SOLUTION OF SECOND-ORDER ORDINARY DIFFERENTIAL EQUATIONS 57
There are many different ways of computing a particular derivative. For
example, f
i
may be solved for from (2.2.5) to give
f
i
=
1
h
(f
i+1
−f
i
) −
1
2
hf
i
−
1
6
h
2
f
i
−···
With a truncation error O(hf
i
), it is approximated by
f
i
.
=
1
h
(f
i+1
−f
i
) (2.2.6)
This a forward-difference formula for the first-order derivative, so named because
it involves the values of the function at x
i
and at a point ahead of it. On the other
hand, if we use (2.2.4), a backward-difference formula of the form
f
i
.
=
1
h
(f
i
−f
i−1
) (2.2.7)
is obtained whose truncation error is of the same order of magnitude as the one
associated with the previous formula, except for a difference in sign. Thus, the
approximations (2.2.6) and (2.2.7) will give similar accuracies in a numerical
computation. A more accurate approximation, having an error of O(h
2
f
i
),is
obtained by subtracting (2.2.4) from (2.2.5); this has the form
f
i
.
=
1
2h
(f
i+1
−f
i−1
) (2.2.8)
Because of its appearance on the right-hand side, it is called a central-difference
formula for f
. Formulas giving any desired accuracies can be obtained by
assigning additional values to m in (2.2.3) and using the same technique just
demonstrated.
To approximate the second-order derivative of f , we show only a central-
difference formula
f
i
.
=
1
h
2
(f
i+1
−2f
i
+f
i−1
) (2.2.9)
having an error O(h
2
f
iv
i
). It is obtained by adding (2.2.4) and (2.2.5) to eliminate
f
i
. Formulas of various truncation errors for computing derivatives up to the
fourth order are tabulated by McCormick and Salvadori (1964, Section 3.2).
We now return to the differential equation (2.2.1). To allow errors of the same
order of magnitude in the two derivatives shown in that equation, we use the
central-difference formulas (2.2.8) and (2.2.9). Thus, at a point x
i
, the differential
equation (2.2.1) is approximated by the difference equation
1
h
2
(f
i+1
−2f
i
+f
i−1
) +
1
2h
A
i
(f
i+1
−f
i−1
) + B
i
f
i
= D
i
58 INVISCID FLUID FLOWS
where A
i
, B
i
,andD
i
denote, respectively, A(x
i
), B(x
i
),andD(x
i
). Multiplying
the equation by h
2
and grouping similar terms, we obtain
1 −
h
2
A
i
f
i−1
+(−2 +h
2
B
i
)f
i
+
1 +
h
2
A
i
f
i+1
= h
2
D
i
It can be written in a more convenient form
C
i1
f
i−1
+C
i2
f
i
+C
i3
f
i+1
= C
i4
(2.2.10)
by calling
C
i1
= 1 −
h
2
A
i
C
i2
=−2 +h
2
B
i
C
i3
= 1 +
h
2
A
i
C
i4
= h
2
D
i
(2.2.11)
The preceding coefficients are known constants at any interior point in the spec-
ified range of x. Equation (2.2.10), applied at i = 1, 2, ..., n, gives the set of n
linear algebraic equations to be solved simultaneously for the n unknowns f
i
.
Special attention is needed when i = 1andn are assigned in (2.2.10). These
two equations are
C
11
f
0
+C
12
f
1
+C
13
f
2
= C
14
and
C
n1
f
n−1
+C
n2
f
n
+C
n3
f
n+1
= C
n4
Since f
0
and f
n+1
are known from boundary conditions, the two involved terms
on the left side are constant and therefore are moved to the right. To simplify the
appearance of our program, we assign the value of (C
14
−C
11
f
0
) to C
14
and the
value of (C
n4
−C
n3
f
n+1
) to C
n4
. This action may be expressed symbolically as
C
14
← (C
14
−C
11
f
0
)
C
n4
← (C
n4
−C
n3
f
n+1
)
(2.2.12)
After this rearrangement, C
11
and C
n3
disappear from the left side and the set of
n simultaneous equations becomes, when expressed in matrix notation,
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
C
12
C
13
00··· 000
C
21
C
22
C
23
0 ··· 000
0 C
31
C
32
C
33
··· 000
········ · ·
········ · ·
········ · ·
0000··· C
n−1,1
C
n−1,2
C
n−1,3
0000··· 0 C
n1
C
n2
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
f
1
f
2
f
3
·
·
·
f
n−1
f
n
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
=
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
C
14
C
24
C
34
·
·
·
C
n−1,4
C
n4
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
(2.2.13)

NUMERICAL SOLUTION OF SECOND-ORDER ORDINARY DIFFERENTIAL EQUATIONS 59
The coefficient matrix on the left-hand side of (2.2.13) is called a tridiagonal
matrix, whose nonvanishing elements form a band, three elements wide along
the diagonal. This particular set of equations can be solved by using the Gaussian
elimination method. According to this method, we multiply the second equation
in (2.2.13) by C
12
and the first by C
21
and then take the difference of the two to
eliminate f
1
. The resulting equation is
(C
22
C
12
−C
21
C
13
) f
2
+C
23
C
12
f
3
= C
24
C
12
−C
21
C
14
In this equation, if we call the coefficient of f
2
by the name C
22
,thatoff
3
by the
name C
23
, and the group on the right-hand side by the name C
24
, and if the final
equation is used to replace the second equation in (2.2.13), the form of (2.2.13)
will remain unchanged except that C
21
is replaced by zero. Working with the new
second equation and the third equation in (2.2.13), C
31
can be eliminated by using
the same technique. The same process is repeated until C
n−1,1
is eliminated. In
summary, the eliminating processes are achieved by successively renaming the
coefficients according to the following assignments:
C
i2
← (C
i2
C
i−1,2
−C
i1
C
i−1,3
)
C
i3
← C
i3
C
i−1,2
C
i4
← (C
i4
C
i−1,2
−C
i1
C
i−1,4
)
⎫
⎬
⎭
i = 2, 3, ..., n − 1 (2.2.14)
At this stage, all the equations in (2.2.13) are in the simple form of having
only two terms on the left-hand side. The value of f
n
can immediately be found
by solving simultaneously the last two equations in (2.2.13). Thus,
f
n
=
C
n4
C
n−1,2
−C
n1
C
n−1,4
C
n2
C
n−1,2
−C
n1
C
n−1,3
(2.2.15)
It can easily be verified that the remaining unknowns can be calculated, in a
backward order, from the recurrence formula
f
j
=
C
j4
−C
j3
f
j+1
C
j2
, j = n −1, n −2, ...,2,1 (2.2.16)
The numerical method just described is now summarized as follows. The dif-
ferential equation (2.2.1) is first replaced by a set of difference equations (2.2.10),
whose coefficients are calculated according to (2.2.11). Boundary conditions are
taken care of by executing the actions shown in (2.2.12). Finally, the unknowns
f
i
, with i = 1, 2, ..., n, are computed by following the procedure represented by
(2.2.14) to (2.2.16). The last part of the computation will be programmed under
a subroutine named
TRID, which will appear in the next program.
Later in Chapter 4, we introduce other efficient methods for solving tridiag-
onal equations, i.e., the compact-storage Thomas algorithm based on Gaussian
elimination, and the LU decomposition, which is especially useful when many
systems have to be solved with the same coefficient matrix but with different
right-hand-sides, such as in parabolic partial differential equations with constant
coefficients.
60 INVISCID FLUID FLOWS
2.3 RADIAL FLOW CAUSED BY DISTRIBUTED SOURCES
AND SINKS
The numerical method just described for solving boundary-value problems is
applied in this section to solve a flow problem with a known solution, so that
the accuracy of the method can be tested. The method will be used later in
Section 3.3 on problems whose solutions cannot be obtained analytically.
Consider a radial flow in the domain r
0
≤ r ≤ 4r
0
, within which there is an
axisymmetric distribution of sources whose strength increases linearly with r.
For such a problem the governing equation (2.1.20) becomes
d
2
dr
2
+
1
r
d
dr
φ = q
0
r
r
0
(2.3.1)
where q
0
is the source strength at r = r
0
. The radial velocity is computed from
(2.1.10):
u
r
=
dφ
dr
(2.3.2)
It is always more convenient to work with dimensionless equations. If u
0
represents a characteristic velocity, the following dimensionless variables can be
introduced.
R =
r
r
0
, =
φ
r
0
u
0
, U =
u
r
u
0
(2.3.3)
It follows that in the domain 1 ≤ R ≤ 4, the flow is described by the dimension-
less equations
d
2
dR
2
+
1
R
d
dR
= αR (2.3.4)
and
U =
d
dR
(2.3.5)
in which α = q
0
r
0
/u
0
is a dimensionless source strength. Equation (2.3.4) has a
general solution of the form
=
1
9
αR
3
+β ln R + γ
The first term on the right-hand side is the particular solution representing the
flow caused by the source distribution. The homogeneous solution consists of
two terms: the first represents a line source located at R = 0 having strength β,
and the second is just a constant. Since the velocity field is not affected by the
constant term in , γ may conveniently be set to zero. Thus, for α = 9and
β =−24, the expression
= R
3
−24 ln R (2.3.6)
INVERSE METHOD I: SUPERPOSITION OF ELEMENTARY FLOWS 61
is the exact solution of the equation
d
2
dR
2
+
1
R
d
dR
= 9R (2.3.7)
satisfying the boundary conditions
= 1atR = 1
= 64 −24 ln 4 at R = 4
(2.3.8)
The corresponding dimensionless radial velocity is, from (2.3.5),
U = 3R
2
−
24
R
(2.3.9)
To solve numerically the boundary-value problem consisting of the differential
equation (2.3.7) and boundary conditions (2.3.8), the equation is first compared
with the standard form (2.2.1) to obtain
A(R) =
1
R
B(R) = 0
D(R) = 9R
(2.3.10)
The independent variable in these relations has already been changed from the
original x to R. The details of the numerical computation are depicted in Program
2.1, in which the range of R between 1 and 4 is divided equally into 30 intervals.
Once the values of evaluated at the interior points are obtained following
the procedure described in the previous section, the radial velocity, which is the
first-order derivative of according to (2.3.5), is computed using the central-
difference formula
U
i
=
i+1
−
i−1
2h
(2.3.11)
The numerical results for and U are then printed out to compare with the
exact solutions represented by (2.3.6) and (2.3.9).
The output of Program 2.1 (Table 2.A.1, see Appendix) shows that the errors
of the numerical solution are less than 1% in φ and 0.2% in U ,whichmaybe
considered satisfactory in most engineering problems. Results of higher accura-
cies can be obtained by increasing the number of intervals at the cost of longer
computing time. You may verify this statement by comparing the data obtained
by varying the number of intervals in Program 2.1.
2.4 INVERSE METHOD I: SUPERPOSITION OF ELEMENTARY FLOWS
In the previous numerical example, we look directly for a solution to the
governing equation that satisfies a set of assumed boundary conditions. Such
boundary-value problems are common in studying potential flows. For example,
in the problem of a uniform flow past a body of given shape, a solution to the