Biringen S., Chow C.-Y. An Introduction to Computational Fluid Mechanics by Example
Подождите немного. Документ загружается.

122 INVISCID FLUID FLOWS
u
C
and a
C
are computed immediately by adding and subtracting the above
equations. Thus,
u
C
=
1
2
(u
A
+u
B
) +
1
γ −1
(a
A
−a
B
) (2.12.6)
a
C
=
γ −1
4
(u
A
−u
B
) +
1
2
(a
A
+a
B
) (2.12.7)
Although the exact shape of the characteristics cannot be determined unless u
and a are both known in the region below point C , the solution may be com-
puted approximately if the distance between points A and B is small. Under this
condition the curved characteristics can be treated as two straight lines of slopes
u
A
+a
A
and u
B
−a
B
, respectively, and the conditions at point C , which is the
intersection of these two straight lines, are described approximately by (2.12.6)
and (2.12.7).
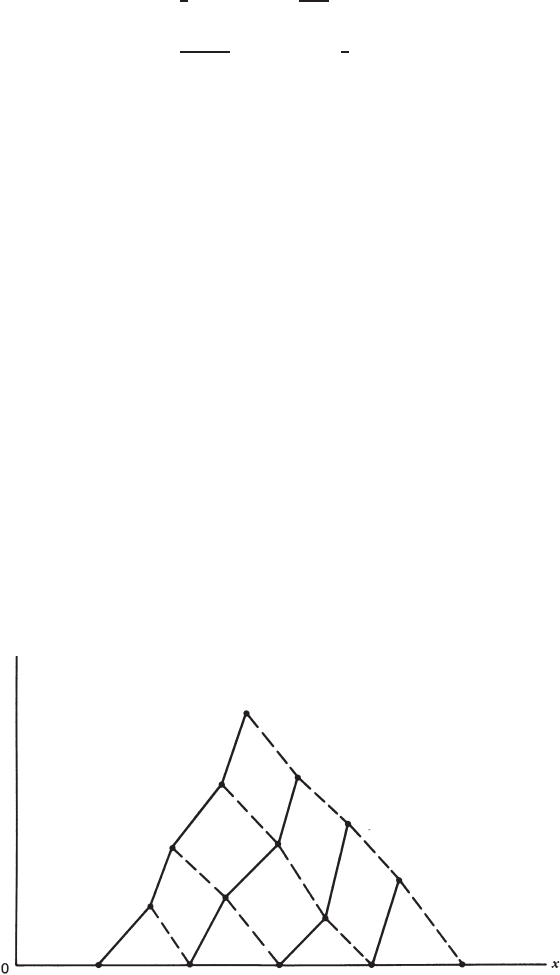
Thus, when a row of points is selected at small distances apart on the x axis
at t = 0, the solution can be computed step by step at later times by constructing
a network using the local slopes of the characteristics, shown in Fig. 2.12.2. This
method, however, is not practical for machine calculation, because the locations
of data points in the network are not known a priori. Many finite-difference
techniques have been developed for solving the same problem on a predeter-
mined rectangular mesh. The one chosen to be used here, suggested by Courant,
Isaacson, and Rees (1952), is convenient for programming and yet is physically
interpretable.
Let us adopt a grid system, exactly the same as that sketched in Fig. 2.10.1, for
numerical solution of the simultaneous nonlinear equations (2.12.4) and (2.12.5).
Suppose u and a have already been computed at all grid points on time level
t
j
; we now proceed to find the conditions at the grid points on the next time
level t
j+1
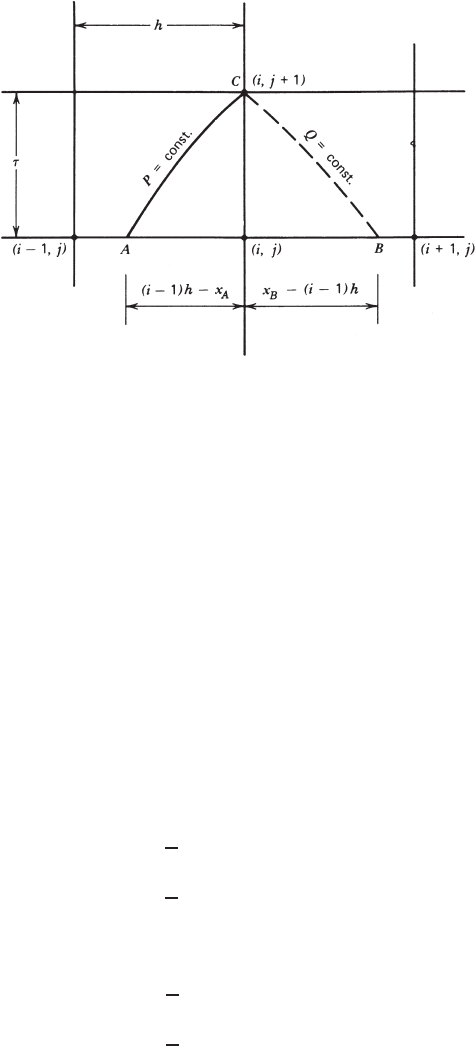
, for example, at point C ,or(i, j + 1), as shown in Fig. 2.12.3. If the
t
FIGURE 2.12.2 Characteristic network.
PROPAGATION OF A FINITE-AMPLITUDE WAVE: FORMATION OF A SHOCK 123
FIGURE 2.12.3 Finite-difference scheme for a rectangular mesh.
characteristics through this point intersect with the back horizontal grid line at
points A and B, respectively, then, according to the method of characteristics
described in Fig. 2.12.1, the condition at C is determined approximately from
those at A and B by using formulas (2.12.6) and (2.12.7). The location and
condition at points A and B are to be interpolated from the known information
at grid points on that same time level.
Treating the characteristics as straight lines and approximating their slopes by
u
i, j
+a
i, j
and u
i, j
−a
i, j
respectively, we find, from Fig. 2.12.3,
x
A
= (i −1)h − τ
)
u
i, j
+a
i, j
*
(2.12.8)
x
B
= (i −1)h − τ
)
u
i, j
−a
i, j
*
(2.12.9)
After points A and B have been located, linear interpolations are then used to
find u
A
and a
A
within the interval between x
i−1
and x
i
. Thus,
u
A
= u
i, j
+
τ
h
)
u
i, j
+a
i, j
*)
u
i−1, j
−u
i, j
*
(2.12.10)
a
A
= a
i, j
+
τ
h
)
u
i, j
+a
i, j
*)
a
i−1, j
−a
i, j
*
(2.12.11)
Similarly, at B,
u
B
= u
i, j
−
τ
h
)
u
i, j
−a
i, j
*)
u
i+1, j
−u
i, j
*
(2.12.12)
a
B
= a
i, j
−
τ
h
)
u
i, j
−a
i, j
)(a
i+1, j
−a
i, j
*
(2.12.13)
124 INVISCID FLUID FLOWS
u
C
and a
C
or, in fact, u
i, j +1
and a
i, j +1
are computed immediately following the
substitution of (2.12.10) to (2.12.13) into (2.12.6) and (2.12.7).
Detailed analysis of this numerical method has been made by Courant et al.
for a more general system of equations. The result is accurate to the first order
of h. For computational stability it requires that the ratio τ/h be so chosen that
the numerical domain of dependence of any point in the mesh is not less than
the physical domain of dependence determined by the characteristics. In other
words, the stability condition is that both
τ
h
|
u +a
|
≤ 1and
τ
h
|
u −a
|
≤ 1 (2.12.14)
are satisfied everywhere in the domain of computation.
An improved numerical scheme with second-order accuracy was outlined by
Hartree (1958). In his method the curved characteristics through C are approx-
imated by two straight lines whose slopes are, respectively, the average of the
values at C and A and the average of those at C and B instead of the values at
(i, j ). The improved accuracy is paid for by the increased effort in computing the
conditions at points A and B by iteration. In the following example the simpler
method of Courant et al. will be used for the purpose of illustration.
A 2-m-long tube is considered whose left end is closed and right end is open,
similar to the tube shown in Fig. 2.11.1. The length of the tube is again divided
into 0.02-m intervals, resulting in 101 vertical grid lines for the numerical work.
Let a
0
be the speed of sound in the tube in an undisturbed state. At t = 0a
rightward-propagating wavelet of 1-m wavelength is produced in the left half
of the tube. To exaggerate the effect of finite amplitude and to show an easily
recognized distortion in wave shape, we assume that the initial amplitude of the
wavelet is a
0
/2 and that its initial shape is described by a set of broken straight
lines defined by
u
i,1
=
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
a
0
2
i − 1
12
for 1 ≤ i ≤ 13
a
0
2
26 − i
13
for 13 < i ≤ 39
a
0
2
i −51
12
for 39 < i ≤ 51
0elsewhere
The initial condition for a is determined by that for u through
a = a
0
±
γ −1
2
u (2.12.15)
which relates the local speed of sound to the local particle velocity (same sign
as x) in an isentropic wave. The negative sign is to be taken only if the wave is
traveling in the negative x direction. The derivation of (2.12.15) can be found in
Section 3.9 of Liepmann and Roshko (1957) and therefore is not repeated here.

PROPAGATION OF A FINITE-AMPLITUDE WAVE: FORMATION OF A SHOCK 125
The boundary conditions at the ends can be derived with the help of Fig. 2.12.3.
At the left end of the tube where i = 1, only one backward characteristic can be
drawn through a grid point along which Q = constant. Combining this with the
condition that particle velocity vanishes at a closed end gives
u
1, j +1
= 0 (2.12.16)
a
1, j +1
= a
B
−
γ −1
2
u
B
(2.12.17)
where u
B
and a
B
are computed for i = 1 from (2.12.12) and (2.12.13). At a
grid point at the right end of the tube open to the atmosphere, the density and
therefore the sonic speed is the same as that outside. Furthermore, through such a
point there is only one backward characteristic along which P = constant. Thus,
the boundary conditions there are
u
m, j +1
= u
A
+
2
γ −1
(a
A
−a
0
) (2.12.18)
a
m, j +1
= a
0
(2.12.19)
where m is the maximum value of i and u
A
, a
A
are computed from (2.12.10) and
(2.12.11) for i = m.
The variables in Program 2.9 are named according to their original form. For
example,
UA, UB, AA,andAB represent, respectively, u
A
, u
B
, a
A
,anda
B
.Weuse
AMPLTD for the initial amplitude of the velocity distribution, RATIO for τ /h,and
COEFF for (γ − 1)/2.
γ is chosen to be 1.4 for air at sea level. For the fixed value of h = 0.02 m,
the size of time steps is determined from the stability condition (2.12.14). It
involves u and a, which are both unknown before the problem is solved. In the
program a trial value τ = 0.5h/a
0
is used. Before computing the solution at a
grid point, we check (2.12.14) and discontinue the computation whenever this
condition is violated. The result shows that this trial value is satisfactory for the
present problem at all grid points.
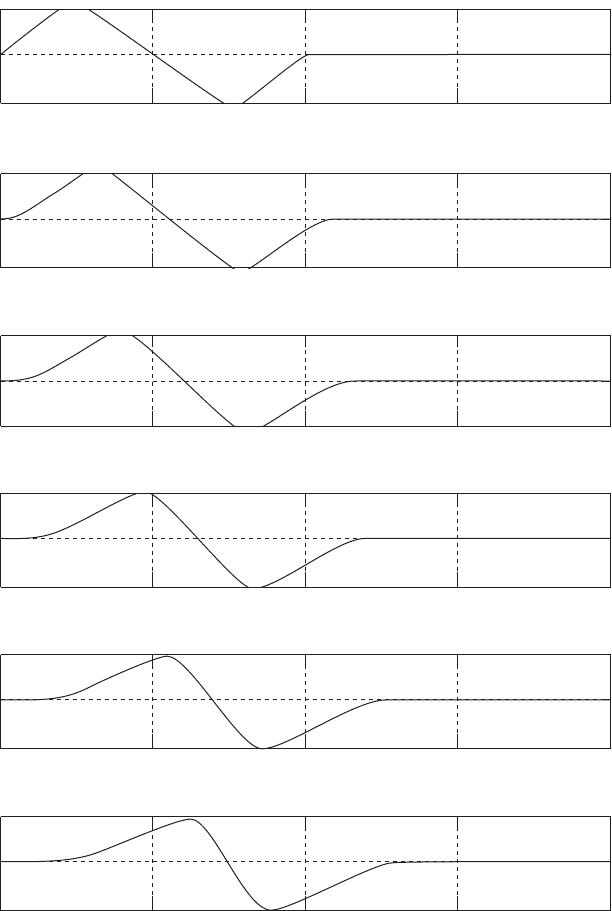
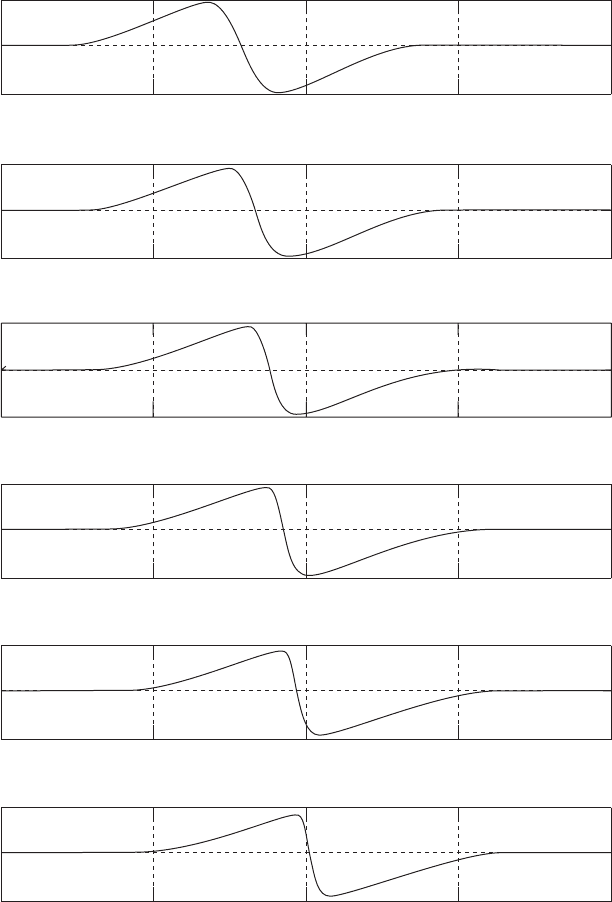
The output of Program 2.9 displays the velocity distributions at increasing
time steps (Time Series 2). It is now examined to find the effects of keeping the
nonlinear terms in the governing equations.
In the central part of the wave ∂u/∂x is negative; that is, the right-moving
velocity of a gas particle is faster than that of a particle ahead of it. Thus, in this
region gas particles are catching up with those ahead; this is called a compression
region. The time sequence plots show that the width of this region decreases with
time, so that the wave profile is steepening in the central portion. On the other
hand, in the leading and trailing parts of the wave where ∂u/∂x is positive, gas
particles ahead are moving faster than those behind. In each of these expansion
regions the width increases and the profile flattens with increasing time.
As the wave propagates its profile is no longer antisymmetric about the node.
The left portion, within which u is positive, becomes shorter than that on the
right portion, within which u is negative, while the total length of the wave is
126 INVISCID FLUID FLOWS
0 0.5 1 1.5 2
−150
0
150
Time = 0*TAU = 0 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 5*TAU = 0.00014706 seconds
0
0.5 1 1.5 2
−150
0
150
Time = 10*TAU = 0.00029412 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 15*TAU = 0.00044118 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 20*TAU = 0.00058824 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 25*TAU = 0.00073529 seconds
Time Series 2 Plate 1.
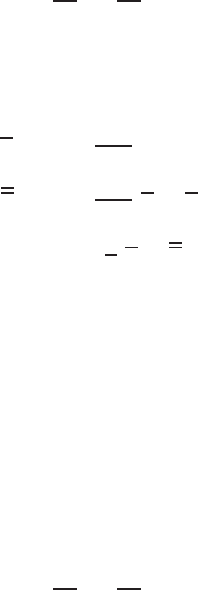
PROPAGATION OF A FINITE-AMPLITUDE WAVE: FORMATION OF A SHOCK 127
0 0.5 1 1.5 2
−150
0
150
Time = 30*tau = 0.00088235 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 35*tau = 0.0010294 seconds
0
0.5 1 1.5 2
−150
0
150
Time = 40*tau = 0.0011765 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 45*tau = 0.0013235 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 50*tau = 0.0014706 seconds
0 0.5 1 1.5 2
−150
0
150
Time = 55*tau = 0.0016176 seconds
Time Series 2 Plate 2.

128 INVISCID FLUID FLOWS
kept constant. In addition, the amplitude of the wave on the left side of the node
diminishes faster in time than that on the right.
When t = 40τ, the wave profile in the compression region becomes almost
a vertical line. In other words, at this time a drastic change in u can be found
across a very short distance. This is, in fact, a shock wave.
Actually, as explained by Liepmann and Roshko (1957, Section 3.10), before
this situation is reached, the velocity gradient becomes so great that viscous and
heat transfer effects can no longer be neglected and the governing equations
(2.12.4) and (2.12.5) break down. Even if it is numerically feasible, the compu-
tation should be stopped before any part of the wave becomes too steep.
The development of a finite-amplitude wave into a shock is analogous to the
breaking of a water wave to form a bore. A description of the latter phenomenon
can be found in Section 10.10 of Stoker (1957).
Problem 2.11 In the computation of Program 2.9, the wave has not yet been
affected by the boundary conditions unless more time steps are added. To study
the nonlinear effects on wave reflection, run Program 2.9, which is modified for
the following two waves.
1. A left-propagating wave having the same initial velocity distribution as that
specified in Program 2.9.
2. A right-propagating wave of the same initial velocity profile, but shifted
one wavelength to the right.
2.13 AN APPLICATION TO BIOLOGICAL FLUID DYNAMICS: FLOW
IN AN ELASTIC TUBE
In this section we present a one-dimensional analysis of flow in an elastic tube
that can be used as a model for arterial blood flow in humans and in animals. The
governing equations are based on the inviscid, one-dimensional (area-averaged)
form of the equations for mass and momentum, as well as an equation between the
vessel cross-sectional area and pressure (Anliker, Rockwell, and Ogden, 1971).
This model was extended to coronary arterial blood flow in horses by Rumberger
and Nerem (1977) using the method of characteristics. Because of its ease of
implementation, here we propose to use the two-step explicit MacCormack (1969)
finite-difference method for the numerical integration of the resulting nonlinear
hyperbolic system of equations.
The one-dimensional model equations that we adopt from Anliker et al. (1971)
are
∂S
∂t
+
∂SV
∂z
+ψ = 0 (2.13.1)
∂V
∂t
+V
∂V
∂z
+
1
ρ
∂p
∂z
= f (2.13.2)
S = S (p, z ) (2.13.3)
AN APPLICATION TO BIOLOGICAL FLUID DYNAMICS: FLOW IN AN ELASTIC TUBE 129
V (z, t) is the instantaneous, area-averaged flow velocity, p(z, t) is the local pres-
sure, and the effect of wall friction is parameterized in terms of the force term,
f (force per unit mass of fluid in the axial z direction). Fluid density is ρ,and
(2.13.3) is an equation of state expressing the cross-sectional area of the ves-
sel, S , as a function of the pressure in the vessel, p, and the axial coordinate,
z. Because we consider an elastic tube with no branches and therefore with no
leakage, the volumetric outflow term is set to ψ = 0.
Once the equation of state (2.13.3) and the friction term f are specified,
the computational problem reduces to integrating the system of equations
comprising (2.13.1) and (2.13.2) for the variables S and V ; p is calculated
from the equation of state.
Before specifying the various inputs into the computer code necessary to inte-
grate this system of equations, we will outline the multilevel (predictor–corrector)
explicit second-order finite difference scheme that was developed by MacCor-
mack (1969) for the numerical integration of nonlinear hyperbolic partial differ-
ential equations. The original method and its variations have been used in many
applications in computational aerodynamics and fluid mechanics.
Consider the one-dimensional linear convection equation,
∂u
∂t
+a
∂u
∂x
= 0 (2.13.4)
where a is a constant convection velocity, and u is a flow function, u = u(x, t),
that is being convected. The application of the MacCormack scheme to this
hyperbolic partial differential equation can be written as
u
i
= u
n
i
−
at
x
(u
n
i+1
−u
n
i
) (2.13.5)
u
i
= u
n
i
−
at
x
(
u
i
−u
i−1
) (2.13.6)
u
n+1
i
=
1
2
(
u
i
+u
i
) (2.13.7)
In (2.13.5)–(2.13.7), the index n refers to time level and the index i
represents position in space. The scheme will be stable for Courant number,
C =
|
a(t/x)
|
≤ 1; highest accuracy will be obtained when C = 1, which
is generally possible for linear equations. It is apparent from the fact that the
characteristic direction for this problem is the line whose slope is dx/dt = a,and
when the solution advances on this characteristic, which is the case when C = 1,
then it is exact. In many cases, when the equation is nonlinear, e.g., if a = u,
then generally C < 1 will be required, so that one would have to sacrifice
accuracy for numerical stability. For example, in Problem 2.15, it will be
necessary to maintain C < 0.2, otherwise the solution rapidly becomes unstable.
Let us now consider the nonlinear convection equation,
∂u
∂t
+u
∂u
∂x
= 0 (2.13.8)
130 INVISCID FLUID FLOWS
We can rewrite this equation in conservative form with the flux term F = u
2
/2:
∂u
∂t
=−
∂F
∂x
Application of the MacCormack explicit method to this problem consists of
the predictor step (forward in space), which reads
u
i
= u
n
i
−
t
x
)
F
n
i+1
−F
n
i
*
(2.13.9)
and combining (2.13.6) and (2.13.7), the corrector step (backward in space) can
be written as
u
n+1
i
=
1
2
$
u
n
i
+u
i
−
t
x
)
F
i
−F
i−1
*
%
F = u
2
/2
(2.13.10)
In most cases, alternating forward–backward space differencing with backward–
forward differencing avoids the inherent bias in one-sided differences. The sta-
bility of this scheme requires
C =
"
"
"
"
u
max
t
x
"
"
"
"
≤ 1 (2.13.11)
but for nonlinear problems one would have to sacrifice from accuracy for numer-
ical stability and use values for C much less than 1. A generalization of this
method to fourth-order accuracy in space (two–four method) was derived by
Gottlieb and Turkel (1976).
Another method that has seen widespread popularity for the numerical inte-
gration of the Navier-Stokes equations is the implicit Beam and Warming method
based on Crank-Nicolson time advancement. However, when applied to the
nonlinear convection equation (2.13.8), the resulting finite difference scheme
is dispersive, and does not have any inherent numerical dissipation (Tannehill
et al. 1997, p. 121). Consequently, to maintain numerical stability, it is often
necessary to add artificial dissipation to smooth numerical instabilities. How this
term modifies the ensuing results is controversial but, nevertheless, in practice,
artificial dissipation has been used often. For the one-dimensional convection
equation (2.13.8), this term is written as (Tannehill et al. 1997, p. 193)
D =−
μ
e
8
)
u
n
i+2
−4u
n
i+1
+6u
n
i
−4u
n
i−1
+u
n
i−2
*
(2.13.12)
Stability will be maintained with
0 <μ
e
≤ 1 (2.13.13)
For a discussion of artificial viscosity and dissipation see Section 4.2. We also
refer the reader to Laney (1998), Tannehill et al. (1997), and Anderson (1995).
AN APPLICATION TO BIOLOGICAL FLUID DYNAMICS: FLOW IN AN ELASTIC TUBE 131
The Beam and Warming method advances (2.13.8) in time using the implicit
Crank-Nicolson (trapezoidal) differencing such that
u
n+1
i
= u
n
i
−
t
2
∂F
∂x
n
+
∂F
∂x
n+1
(2.13.14)
From (2.13.14), it is apparent that the finite difference equation is nonlinear and
we must either use iteration or linearization. Beam and Warming (1976) obtained
the following linearization:
F
n+1
≈ F
n
+A
n
(u
n+1
−u
n
) (2.13.15)
For equation (2.13.8), the Jacobian A is defined as
A =
∂F
∂u
=
∂(u
2
/2)
∂u
= u (2.13.16)
Substituting (2.13.15) and (2.13.16) into (2.13.14), we obtain
u
n+1
i
= u
n
i
−
t
2
-
2
∂F
∂x
n
+
∂
∂x
'
u
n
(u
n+1
i
−u
n
i
)
(
.
(2.13.17)
Using second-order central differences in space,
∂
∂x
[u
n
(u
n+1
i
−u
n
i
)] =
u
n
i+1
u
n+1
i+1
−u
n
i−1
u
n+1
i−1
2x
−
u
n
i+1
u
n
i+1
−u
n
i−1
u
n
i−1
2x
(2.13.18)
Substituting (2.13.18) into (2.13.17), we obtain the tridiagonal form of the finite-
difference equation, which reads
−
(t)u
n
i−1
4x
u
n+1
i−1
+u
n+1
i
+
(t)u
n
i+1
4x
u
n+1
i+1
=−
t
2x
)
F
n
i+1
−F
n
i−1
*
+
t
4x
u
n
i+1
u
n
i+1
−
t
4x
u
n
i−1
u
n
i−1
+u
n
i
+O(t
2
, x
2
)
(2.13.19)
The method is unconditionally stable in the von Neumann sense, but generally
for nonlinear equations stability will be obtained only with artificial viscosity,
such as adding (2.13.12) directly to the right-hand-side of (2.13.19).
A more general model equation is the viscous Burgers equation, given as
∂u
∂t
+u
∂u
∂x
= ν
∂
2
u
∂x
2
(2.13.20)
where ν is a transport coefficient. Defining F = u
2
/2, and d = νt/(x)
2
,
MacCormack explicit method can be applied to (2.13.20) with the following