Bayro-Corrochano E., Scheuermann G. Geometric Algebra Computing: in Engineering and Computer Science
Подождите немного. Документ загружается.


28 D. Hestenes
because it is proportional to the Euclidean pseudoscalar I
e
=ie, which is invariant
because i and e are invariant. This concept and result is unique to CGA, so it merits
further discussion.
The pseudoscalar I
e
= ie squares to I
2
e
=−e
2
= 0, so it cannot be used for an
invertible duality mapping. However, we can define a conjugate pseudoscalar I
∗
e
≡
ie
0
so that I
∗
e
·I
e
=I
∗
e
I
e
=−e ·e
0
=1. Then we can express the invariant (113)as
a scalar:
(S
1
∧S
2
) ·(ie
0
) =m
1
·n
2
+m
2
·n
1
=S
1
·S
∗
2
, (114)
where a dual screw = coscrew has been defined by
S
∗
k
≡S
k
·(ie
0
) =S
k
ie
0
2
=−in
k
−e
0
m
k
. (115)
This equivalent to the reciprocal screw first introduced by Ball [17]. Comparison
with (97) shows that wrenches are coscrews! Of course, the dual defined here should
not be confused with the dual introduced in (11). The asterisk notation has been used
for both to emphasize their conceptual commonality.
Finally, we note that for a single screw, the pitch h appears as a ratio of the
invariants (114) and (112):
h =−
1
2
S ·S
∗
S ·S
=n ·m
−1
. (116)
Screw theory is basically about the generators of displacements. The simplicity of
its formulation within CGA belies the richness and complexity of its applications in
mechanical engineering, for which the serious student must consult the literature.
As guides to the screw theory literature, I recommend two books. The first book
[16] concerns use of modern mathematical concepts and notation, which can be
compared to the approach taken here. The second book [18] is by two long-time
practitioners of screw theory. Though it is designed as a textbook for the ill-prepared
engineering student of today, it provides a mature perspective on current status with
an authoritative entrée to the literature.
Screw theory literature going back to the nineteenth century contains many gems
that can be recovered by reformulation within CGA. Here is another worthy topic
for doctoral research. It requires more than historical study, for many of the gems
need polishing—there are unsolved problems to be addressed in the new light of
CGA.
To facilitate translations from the literature, relations between CGA and matrix
algebra are established next.
13 Conformal Split and Matrix Representation
Besides its invariance and incredible compactness, one great advantage of the CGA
formulation of rigid body mechanics in the preceding sections is the ease of relating
it to alternative formulations by a conformal split. In this section we consider the

New Tools for Computational Geometry 29
Fig. 13
conformal split in more detail, especially to clarify and facilitate connections to the
vast literature on mechanical systems.
As defined in (43), one factor in the conformal split is the geometric algebra
G
1,1
=G(R
1,1
). The vector space R
1,1
is sometimes referred to as 2D Minkowski
space to emphasize its similarity to 4D Minkowski space R
3,1
, which is a standard
model for spacetime in relativistic physics [4, 6]. It can be generated from a null
basis {e,e
0
| e
2
= e
2
0
= 0,e · e
0
=−1} or from an equivalent orthonormal basis
{e
±
=
1
√
2
(λe ∓λ
−1
e
0
), λ =0,e
2
±
=±1}.
Though the orthonormal basis is more familiar to most readers, as we have
seen already, the null basis is more significant geometrically. It generates a basis
{1,e,e
0
,E} (depicted in Fig. 13) for the entire algebra G
1,1
, with the basic proper-
ties
E
2
=1,e
0
e =E −1,Ee=−eE =e, e
0
E =−Ee
0
=e
0
. (117)
These properties have been used many times in previous sections.
The algebra of dual numbers D ={α + eβ } is an important subalgebra of G
1,1
.
However, it was first proposed by Clifford as an extension of the real numbers anal-
ogous to complex numbers, with the null unit e replacing the imaginary unit i.He
introduced it as an extension of scalars in quaternions to form what he called bi-
quaternions [10, 16]. We can regard it as an extension of the algebra G
3
to G
3
⊗D.
Clifford clearly recognized the geometric significance of this extension for incorpo-
rating the additivity and commutativity properties of translations. In terms of trans-
lation versors, these properties are expressed by
T
a
T
b
=
1 +
1
2
ae
1 +
1
2
be
=1 +
1
2
(a +b)e =T
a+b
=T
b
T
a
. (118)
Clifford’s biquaternions have been used to represent translations and screws by
many authors since. However, we have seen in the preceding section that the dual
numbers must be extended to the entire algebra G
1,1
to accommodate coscrews and
screw invariants. That has been done in the literature primarily by employing ma-
trices in the following way. The algebra G
1,1
is isomorphic to the algebra M
2
(R)
of real 2 ×2 matrices. That is readily established by exhibiting the isomorphism of
30 D. Hestenes
basis elements:
e
+
01
10
,e
−
01
−10
,
E
10
0 −1
, 1
10
01
.
(119)
Accordingly, every multivector M in G
1,1
has a matrix representation
ˆ
M explicitly
given by
M =
1
2
A(1+E)+B(e
+
+e
−
)+C(e
+
−e
−
)+D(1−E)
ˆ
M =
AB
CD
, (120)
where the matrix elements are real numbers. This representation is readily gen-
eralized by allowing the matrix elements to have values in other algebras, G
3
in
particular. Thus, we arrive at the isomorphism:
G
4,1
=G
3
⊗G
1,1
M
2
G
3
. (121)
Properties of this isomorphism are surprisingly rich and have been thoroughly stud-
iedin[13]. That enabled a critique of the matrix representation for the conformal
group, which contributed to developing the invariant formulation in CGA introduced
in [1].
The matrix algebra M
2
(G
3
) has been much used in screw theory with the ele-
ments of G
3
interpreted as complex quaternions. More often, it has been used with
the elements of G
3
represented as 3×3 matrices or column vectors. The alternatives
are best explained by a representative example.
With an obvious change of notation, we can write (103) for the change in screw
coordinates induced by a shift r = x
Q
− x
P
from base point P to point Q in the
form
V
Q
=ev
Q
−iω =T
r
V
P
=e(v
P
−r ×ω) −iω. (122)
This has a matrix representation
ˆ
V
Q
=
ˆ
T
r
ˆ
V
P
with the explicit form
v
Q
ω
=
1 −r×
01
v
P
ω
=
v
P
−r ×ω
ω
. (123)
Similarly, we can write (100) for the induced change of coscrew coordinates in the
form
W
Q
=−e
0
f +iΓ
Q
=T
∗
r
W
P
=−e
0
f +i(Γ
P
+r ×f). (124)
Its matrix representation
ˆ
W
Q
=
ˆ
T
∗
r
ˆ
W
P
has the explicit form
f
Γ
Q
=
10
−r× 1
f
Γ
P
=
f
Γ
P
+r ×f
. (125)
These four equations suffice to show how any equation in the literature on screw
theory or robotics can be translated into CGA and vice versa. For example, in [18]
New Tools for Computational Geometry 31
the screws in (123) and coscrews in (125) are represented as 6-component column
vectors. This example reveals a significant drawback of the matrix representations:
the matrices do not encode the distinction between screws and coscrews, which,
in contrast, is explicitly expressed by the distinction between e and e
0
in (122) and
(124). Expressed in more general terms: the matrix representations suppress the geo-
metric meaning of matrix elements, which is explicitly encoded in the algebra G
1,1
.
Furthermore, the matrix representation (121) implicitly forces one to adopt a con-
formal split, which means, as we have seen, that one is forced into a covariant rather
than invariant approach to geometry. Nevertheless the isomorphism G
1,1
M
2
(R)
is essential for relating CGA to the robotics literature.
14 Linked Rigid Bodies & Robotics
The potential for application of CGA to robotics is best illustrated by a simple ex-
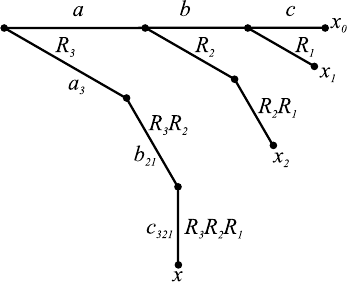
ample. Figure 14 depicts a kinematic chain with three segments in a reference pose:
x
0
=e
0
+a +b +c. (126)
Rotations at its three joints are specified by twistors {R
1
,R
2
,R
3
}. Rotation at the
first joint gives
x
1
=e
0
+a +b +R
1
cR
−1
1
=e
0
+a +b +c
1
. (127)
Subsequent or concurrent rotation at the second joint gives
x
2
=e
0
+a +R
2
b +R
1
cR
−1
1
R
−1
2
=e
0
+a +b
2
+c
21
. (128)
Finally, the net result of rotations at all the joints is general pose:
x =e
0
+R
3
a +R
2
b +R
1
cR
−1
1
R
−1
2
R
−1
3
=e
0
+a
3
+b
32
+c
321
. (129)
Fig. 14
32 D. Hestenes
A conformal split with the fixed point e
0
gives the position vector for the endpoint:
x =x ∧E =R
3
a +R
2
b +R
1
cR
−1
1
R
−1
2
R
−1
3
=a
3
+b
32
+c
321
. (130)
Of course, the rotations need not be confined to a plane (as presumed in Fig. 14
for simplicity of illustration). Restrictions on the range of motion at each joint are
encoded in the twistors. For example, a rotation R
1
with one degree of freedom can
be given the angular form
r
1
=exp
−
1
2
n
1
α
1
, where 0 ≤α
1
≤π, (131)
and unit vector n
1
is the direction of the joint axis for a right-handed rotation. Kine-
matics of the chain can be described a follows. Irrespective of how the joints are
characterized, the twistors satisfy equations of the form
˙
R
k
=−
1
2
iω
k
R
k
. (132)
Hence, for R
32
=R
3
R
2
,wehave
˙
R
32
=−
1
2
iω
32
R
32
with ω
32
=ω
3
+R
3
ω
2
R
−1
3
. (133)
Finally, with ω
321
= ω
3
+ R
3
ω
2
R
−1
3
+ R
3
R
2
ω
1
R
−1
2
R
−1
3
, for the derivative of the
end point position vector (130), we get
˙
x =ω
3
×a
3
+ω
32
×b
32
+ω
321
×c
321
. (134)
This is only the beginning for application of CGA to robotics, but we have all the
theoretical machinery we need for any task. To incorporate dynamics we introduce
the inertia properties of each body with (95) and the applied wrenches with (97).
Moreover, CGA offers a promising approach to modeling complex interactions be-
tween bodies, such as viscoelastic coupling at joints [2].
The next phase in the development of CGA robotics is detailed applications to
specific problems. This development is already underway by attendees at this con-
ference and others in the GA community. However, I see a need for more systematic
mining of the robotics literature to incorporate established problems, results, and
methods in CGA and promote broader interaction within the engineering commu-
nity. I thought about offering suggestions for literature to consult. But the robotics
literature is so vast and variable in complexity and quality that I fear my suggestions
could be as misleading as helpful. Consequently, I add only one recent reference
[19] to those I have already mentioned.
To sum up, CGA provides a powerful mathematical framework for robotics R&D
with the twin goals of (1) simplicity and clarity in mathematical formulation, (2) ef-
ficiency and speed in computation.
Acknowledgement I thank Arvid Halma and Leo Dorst for assistance in preparing the docu-
ment.
New Tools for Computational Geometry 33
References
1. Hestenes, D.: Old Wine in New Bottles: A new algebraic framework for computational ge-
ometry. In: Bayro-Corrochano, E., Sobczyk, G. (eds.) Advances in Geometric Algebra with
Applications in Science and Engineering, pp. 1–14. Birkhäuser, Basel (2001)
2. Hestenes, D., Fasse, E.: Homogeneous rigid body mechanics with elastic coupling. In:
Dorst, L., Doran, C., Lasenby, J. (eds.) Applications of Geometric Algebra in Computer Sci-
ence and Engineering, pp. 197–212. Birkhäuser, Basel (2002)
3. Hestenes, D.: A unified language for mathematics and physics. In: Chisholm, J.S.R., Com-
mon, A.K. (eds.) Clifford Algebras and their Applications in Mathematica Physics, pp. 1–23.
Reidel, Dordrecht (1986)
4. Hestenes, D.: Space-Time Algebra. Gordon & Breach, New York (1966)
5. Hestenes, D., Sobczyk, G.: C
LIFFORD ALGEBRA TO GEOMETRIC CALCULUS, a unified lan-
guage for mathematics and physics. Kluwer, Dordrecht (1984). Paperback (1985). Fourth
printing 1999
6. Doran, C., Lasenby, A.: Geometric Algebra for Physicists. Cambridge University Press, Cam-
bridge (2002)
7. Dorst, L., Fontijne, D., Mann, S.: Geometric Algebra for Computer Science. Morgan Kauf-
mann Publ., Elsevier, San Mateo, Amsterdam (2007/2009)
8. Li, H.: Invariant Algebras and Geometric Reasoning. World Scientific, Singapore (2008)
9. Hestenes, D.: Grassmann’s vision. In: Schubring, G. (ed.) Hermann Günther Grassmann
(1809–1877)—Visionary Scientist and Neohumanist Scholar, pp. 191–201. Kluwer, Dor-
drecht (1996)
10. Clifford, W.K.: Mathematical Papers. Macmillan, London (1882). Ed. by R. Tucker. Reprinted
by Chelsea, New York (1968)
11. Doran, C., Hestenes, D., Sommen, F., Van Acker, N.: Lie groups as spin groups. J. Math. Phys.
34, 3642–3669 (1993)
12. Lasenby, A.: Recent applications of conformal geometric algebra. In: Li, H., et al. (ed.) Com-
puter Algebra and Geometric Algebra with Applications. LNCS, vol. 3519, pp. 298–328.
Springer, Berlin (2005)
13. Hestenes, D.: The design of linear algebra and geometry. Acta Appl. Math. 23, 65–93 (1991)
14. Onishchik, A., Sulanke, R.: Projective and Cayley–Klein Geometries. Springer, Berlin (2006)
15. Hestenes, D.: New Foundations for Classical Mechanics. Kluwer, Dordrecht (1986). Paper-
back (1987). Second edition (1999)
16. Selig, J.: Geometrical Methods in Robotics. Springer, Berlin (1996)
17. Ball, R.S.: A Treatise on the Theory of Screws. Cambridge University Press, Cambridge
(1900). Reprinted in paperback (1998)
18. Davidson, J., Hunt, K.: Robots and Screw Theory: Applications of Kinematics and Statics to
Robotics. Oxford University Press, London (2004)
19. Featherstone, R., Orin, D.: Dynamics. In: Siciliano, B., Khatib, O. (eds.) Springer Handbook
of Robotics, pp. 35–65. Springer, Berlin (2008)

Tutorial: Structure-Preserving Representation
of Euclidean Motions Through Conformal
Geometric Algebra
Leo Dorst
Abstract A new and useful set of homogeneous coordinates has been discovered
for the treatment of Euclidean geometry. They render Euclidean motions not merely
linear (as the classical homogeneous coordinates do), but even turn them into or-
thogonal transformations, through a clever choice of metric in two (not one) addi-
tional dimensions.
To take full advantage of this new possibility, a good representation of orthogo-
nal transformations is required. We find that multiple reflections, while classically
giving unwieldy expressions involving the dot product, become practical by intro-
ducing the more fundamental geometric product (which has the dot product merely
as its symmetric part). We obtain a sandwiching operation between products of vec-
tors as our representation of motions, which is not only easily concatenated, but also
incorporates the computational advantages of complex numbers and quaternions in
a real manner. The antisymmetric part of the geometric product produces a spanning
operation that permits the construction of lines, planes, spheres and tangents from
vectors. Since the sandwiching operation distributes over this construction, ‘objects’
are fully integrated with ‘motions’, in a structure preserving manner.
Additional techniques such as duality (permitting a universal intersection opera-
tion), and the rewriting of operators logarithmically (to obtain quantities that can be
interpolated linearly) complete the techniques of what is ultimately a very conve-
nient geometric algebra. It easily incorporates general conformal transformations,
and can be implemented to run almost as efficiently as classical homogeneous coor-
dinates. The resulting high-level programming language naturally integrates quan-
titative computation with the automatic administration of geometric data structures.
Rather than the usual introductions which plow through Clifford algebra before
they reach this very useful ‘conformal model’ (if they do at all), this tutorial does
the reverse. It structures the new concepts in a manner that shows how each ad-
L. Dorst (
)
Intelligent Systems Laboratory, University of Amsterdam, Science Park 107, 1098 XG,
Amsterdam, The Netherlands
e-mail: L.Dorst@uva.nl
E. Bayro-Corrochano, G. Scheuermann (eds.), Geometric Algebra Computing,
DOI 10.1007/978-1-84996-108-0_2, © Springer-Verlag London Limited 2010
35
36 L. Dorst
ditional sophistication is related to what went before, and how it extends its ex-
pressive and computational power. Throughout, the concepts and techniques will
be illustrated by interactive visualization software (GAviewer, freely available at
www.geometricalgebra.net).
1 Introduction
“Doing geometry” in computer science or engineering requires at least the following
ingredients in a practical computational framework:
• descriptive primitives: such as points, lines, planes, circles, spheres, tangents
• basic constructions: connections, intersections, parametric specification
• motions: translation, rotation, reflection, projection
• properties: size, location, orientation
• practical numerics: approximation, estimation, interpolation, linearization
These ingredients should interweave seamlessly. Notably, the framework should be
structure preserving, in the sense that constructions and properties of primitives
should be covariant under motions. For instance, when moving a circle determined
by three points, it should not be necessary to decompose the circle back into the
points, move those, and then reconstruct; rather, the circle should be a basic element
of computation with an associated motion operator (which should moreover prefer-
ably be identical to that for points). Also, all ingredients should be specifiable in a
sufficiently high-level programming language, which avoids coordinates as specifi-
cation level though it may revert to them when executing the operations. The usual
linear algebra tools have neither of these desirable properties, not even when us-
ing homogeneous coordinates. Yet a practical computational framework exists that
can do all of the above. It is called “conformal geometric algebra” (CGA), and this
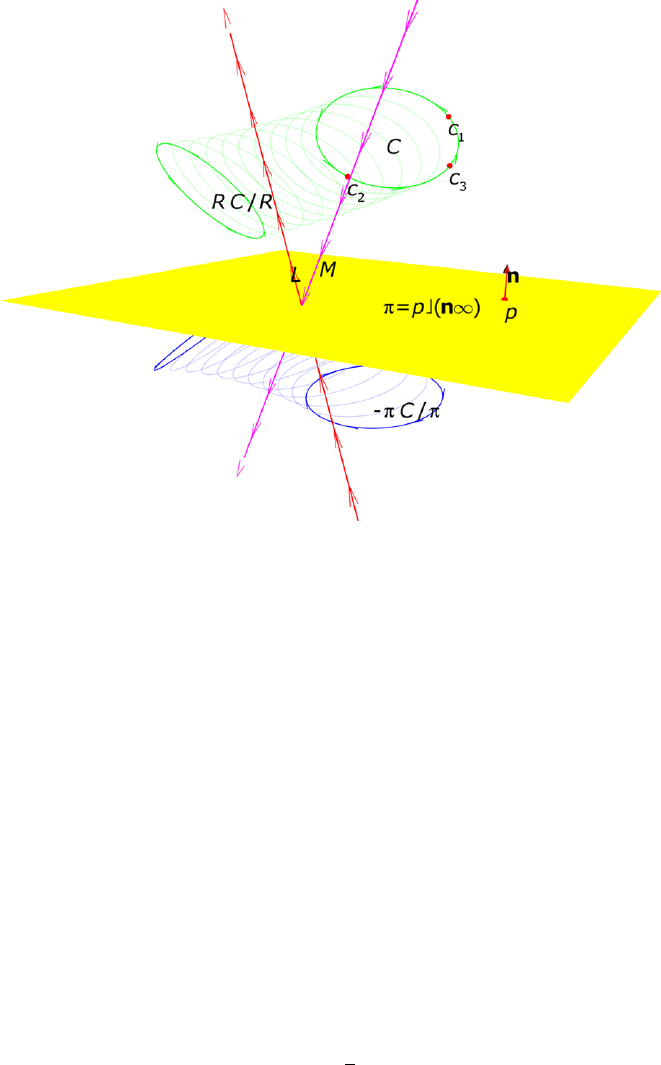
chapter briefly exposes its essential structure. We will explain all elements of Fig. 1,
and more.
2 Conformal Geometric Algebra
2.1 Trick 1: Representing Euclidean Points in Minkowski Space
Let us focus on a 3D space in which we want to perform Euclidean motions. We
can consider it as a 3D vector space and use a position vector x to denote a point
X relative to an (arbitrary) origin. This is naive practice, and not very convenient,
since Euclidean motions are then not even linear transformations. A commonly used
improvement is the homogeneous model, in which the space is augmented with an
extra dimension e
o
, and the point X at x represented as e
o
+x. Now Euclidean mo-
tions are linear transformations but still not structure preserving. More is required.
Structure Preserving Motions Through CGA 37
Fig. 1 An example of the ease of CGA (from [2]). A circle C is generated from three points c
1
,
c
2
, c
3
as C = c
1
∧c
2
∧c
3
. A line is given as a 3-blade L.ThecircleC is to be rotated around the
line L, producing RCR
−1
,withR specified as R = exp(L
∗
φ/2). The rotation is interpolated in
k steps using R
1/k
. Then the whole scene is reflected in the plane π given by a normal vector n
and a point p on it as π =p · (n ∧e
∞
); any element X is reflected as X →(−1)
grade(X)
πXπ
−1
.
In appropriate software such as [3], these coordinate-free formulas are the literal specification of a
computer program producing the scene
In CGA, we introduce two extra dimensions for representational purposes, thus
constructing a five-dimensional space. We introduce two basis vectors for these extra
dimensions, e
o
and e
∞
, and the specific metric given below. As we will see, the
null vectors in this extended space (i.e., the vectors x satisfying x · x = 0inthe
chosen metric) represent weighted points in the Euclidean space (though one usually
employs unit weight points satisfying x ·e
∞
=0). Such vectors representing points
have algebraic properties to construct other elements in a coordinate-free, invariant
manner, as explained in the paper by Hestenes [5] elsewhere in this volume.
In the present introductory paper, we mostly prefer to use an explicit expression
for such a vector x representing a point X, relating it to the “classical” Euclidean
position vector x of the point relative to the chosen origin through
x =e
o
+x +
1
2
x
2
e
∞
. (1)