Bayro-Corrochano E., Scheuermann G. Geometric Algebra Computing: in Engineering and Computer Science
Подождите немного. Документ загружается.

48 L. Dorst
The same structure-preserving property holds for all operations we introduced, be
they spanning, inner product, or duality (relative to a transformed pseudoscalar). In
words: “the transformation of a construction equals the construction of the trans-
formed elements.” This fact is very convenient, for it implies that we can simply
construct something at the origin and then move it into place to find the general
form (hence our preference for origin-based specification in the table above). And
composite elements move by the same versor as points do: the translation versor
T
t
universally translates points, lines, planes, spheres, or tangent elements. As we
mentioned, there is no longer any need for data structures distinguishing between
“position vectors” which feel translations and “direction vectors” which do not; all
is automatically administrated in the algebraic behavior of the corresponding ele-
ments. This is an enormous advantage relative to the classical homogeneous model
for the development of structural code, either by hand or using a code genera-
tor [3].
This principle is also extremely useful in derivations. Let us, for instance, use
it to prove the general formula for the reflection of a line Λ in a dual plane π as
Λ → −πΛπ
−1
, simply from the 1-D direction reflection formula (5). A line Λ
0
with direction u through the origin is given as Λ
0
=e
o
∧u ∧e
∞
, and a dual plane
π
0
through the origin with normal vector n as π
0
=n. The reflection of the direction
u is affected by (5)asu → u
≡−nun
−1
=−π
0
uπ
0
−1
. The reflected line is then
Λ
0
=e
o
∧u
∧e
∞
. Now we note that due to the algebraic commutation (i.e., the geo-
metric orthogonality) of the bold Euclidean and the nonbold extra dimensions e
o
and
e
∞
,wehave−π
0
e
o
π
0
−1
=−ne
o
n
−1
= e
o
and −π
0
e
∞
π
0
−1
=−ne
∞
n
−1
=e
∞
.
Therefore we can “pull out” the reflection operator to act on the whole line Λ
0
by (5):
Λ
0
=
−π
0
e
o
π
0
−1
∧
−π
0
uπ
0
−1
∧
−π
0
e
∞
π
0
−1
=−π
0
(e
o
∧u ∧e
∞
)π
0
−1
=−π
0
Λ
0
π
0
−1
.
This is still only true at the origin, but we can move this construction by a mo-
tion versor V to an arbitrary location. All elements change to their general form
π =Vπ
0
V
−1
, Λ =VΛ
0
V
−1
, and the reflection transformation preserves its struc-
ture since VΛ
0
V
−1
= (V π
0
V
−1
)(V Λ
0
V
−1
)(V π
0
V
−1
) = πΛπ
−1
. Therefore the
general reflection formula of a line in a plane is simply
reflection of a line Λ in the dual plane π : Λ →−πΛπ
−1
.
This includes all aspects of location, direction, and orientation. Note that this com-
putation reflects a general line in a general plane without computing its intersection
point—try doing that using linear algebra! (If you need the intersection point of line
and plane, it is π · Λ, by straightforward application of the universal
meet opera-
Structure Preserving Motions Through CGA 49
tion (7) and duality (6), (8).)
direction u
normal vector
−−−−−−−→ a
as reflector
−−−−−−−→ direction u −2(u ·a)a/a
2
)
embed in GA
⏐
⏐
embed in GA
⏐
⏐
embed in GA
⏐
⏐
direction u
normal vector
−−−−−−−→ a
as reflector
−−−−−−−→ direction u
=−aua
−1
embedinCGA
⏐
⏐
embed in CGA
⏐
⏐
embed in CGA
⏐
⏐
origin line Λ
o
=e
o
∧u ∧e
∞
dual e
o
-plane
−−−−−−−→ π
o
as reflector
−−−−−−−→ origin line Λ
o
=−π
o
Λ
o
π
o
−1
Euclidean versor
⏐
⏐
Euclidean versor
⏐
⏐
Euclidean versor
⏐
⏐
general line Λ =VΛ
o
V
−1
dual plane
−−−−−−→ π
as reflector
−−−−−−−→ general line Λ
=−πΛπ
−1
conformal versor
⏐
⏐
conformal versor
⏐
⏐
conformal versor
⏐
⏐
general circle K =VΛV
−1
dual sphere
−−−−−−→ σ
as invertor
−−−−−−→ general circle K
=−σKσ
−1
We can even apply an arbitrary conformal versor and change the reflecting dual
plane π into a dual sphere σ , and the line L into a circle K; the result is a spherical
inversion operation. (As a further extension, another application of the structure
preservation property shows that the reflection in σ of a general element X is X →
(−1)
grade(X)
σXσ
−1
.)
The conformal model renders all transitions trivial in this transfer, all the way
from a reflection of a Euclidean direction vector at the origin to the inversion of
a general circle in a general sphere. Such is the power of a structure-preserving
framework!
6 Trick 5: Exponential Representation of Versors
Even-graded versors, made by an even number of reflections, represent motions that
can be performed continuously and in small amounts. In Euclidean and Minkowski
spaces, all even-graded versors can be written as the exponentials of bivectors.The
bivector specification of an even versor is often more directly related to the geometry
of the situation than the “product of vectors” method.
As an example of the exponential rewriting, take the rotation R
Iφ
over the an-
gle φ, parallel to the I-plane as treated in (10),
R
Iφ
=cos(φ/2) −sin(φ/2)I =e
−Iφ/2
.
It is the property I
2
=−1 that makes the exponential rewriting permitted:

50 L. Dorst
e
−Iφ/2
= 1 +
1
1!
(−Iφ/2)
1
+
1
2!
(−Iφ/2)
2
+···
=
1 −
1
2!
(φ/2)
2
+···
+
1
1!
(φ/2)
1
−
1
3!
(φ/2)
3
+···
I
= cos(φ/2) −sin(φ/2)I.
The translation versor of (11) can also be written in this exponential form; but since
it involves the bivector t ∧e
∞
, the expansion truncates after two terms (fundamen-
tally due to e
2
∞
=0):
T
t
=1 −t ∧e
∞
/2 =e
−t∧e
∞
/2
.
A rotation around a general 3D unit line Λ over φ is now generated by the versor:
rotation around Λ over φ: R
Λ,φ
=e
Λ
∗
φ/2
Proof This follows from the simply derived structural property
V exp(B)V
−1
=exp
VBV
−1
and the transfer property applied as follows. First recognize that the rotation axis
of the origin rotation R
Iφ
is the line Λ
0
= I
∗
=−I
−∗
, so the origin rotation is
exp(Λ
0
∗
φ/2). Then transfer this by a translation T to the actual location of the de-
sired axis Λ, which changes Λ
0
∗
to T(Λ
0
∗
)T
−1
= (T Λ
0
T
−1
)/(T I
4,1
T
−1
) = Λ
∗
since the pseudoscalar I
4,1
involved in the dualization is translation invariant.
Done.
General rigid body motions can of course also be made, for instance, by the
usual method of combining an origin rotation with a translation. You find that the
result can be written as the exponential of a general conformal bivector on the ba-
sis {e
1
∧e
2
, e
2
∧e
3
, e
3
∧e
1
, e
1
∧e
∞
, e
2
∧e
∞
, e
3
∧e
∞
}, giving the six degrees of
freedom required. Since this space of bivectors is linear, it can be used for motion in-
terpolation. To interpolate between two poses characterized by the versors M
0
and
M
1
, find their bivectors B
0
= log(M
0
) and B
1
= log(M
1
). Now apply a standard
vector interpolation method to smoothly change B
0
into B
1
through intermediate
bivectors B
i
; then use the versors exp(B
i
) to generate the interpolated poses. To ex-
ecute this procedure, one needs to find the bivector corresponding to a given versor;
such “versor logarithms” may be found in [2].
Linearization of versor motions for extrapolation or estimation is also possible
and requires geometric calculus. When performed (see [1]), the first order change in
an element X that is moved by a changing versor V(τ)from a standard element X
0
as X(τ) =V(τ)X
0
V(τ)
−1
is
X(τ +dτ) =X(τ) +
Ω(τ)X(τ)−X(τ)Ω(τ)
with Ω(τ) =
d
dτ
V(τ)
V(τ)
−1
.
Structure Preserving Motions Through CGA 51
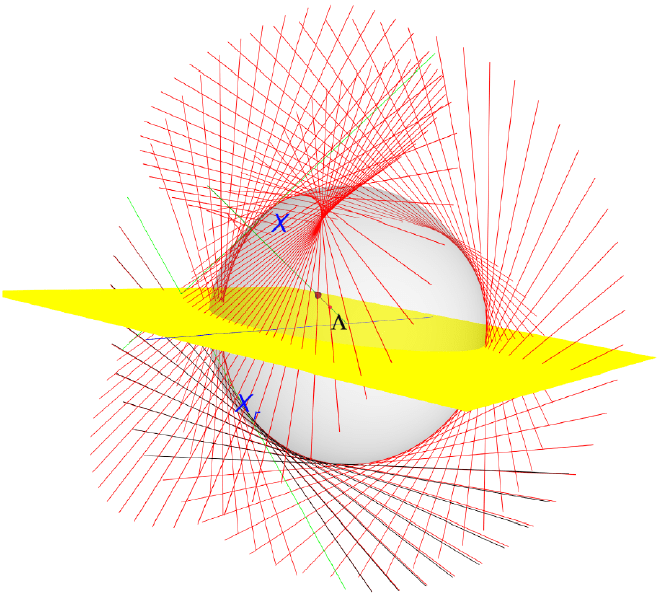
Fig. 4 The mirror Π rotates φ round a line Λ,andalineX is reflected in it. Using a local
first-order linearization of the reflection versor, one can derive the perturbation of the reflected line
to second order (in black) to be the rotation with versor exp(−φ((Λ ·Π)/Π)
∗
), i.e., around the
projection of Λ onto Π with angle 2φ cos(Π, Λ). For details, see [2]
If V is normalized, Ω is a bivector, and its commutator product with X(τ) pre-
serves the grade. This linearization of geometrical perturbations is very useful in
applications, see Fig. 4. The full geometric calculus is truly powerful, and one can
differentiate relative to an arbitrary element of the algebra (such as a blade or a ver-
sor). We cannot treat that here, and the reader is referred to introductions like [2]
and [1].
7 Trick 6: Sparse Implementation at Compiler Level
Implementation of CGA may seem to be expensive. After all, to treat a 3D space,
we embed into a 5D representational space and use the geometric algebra of that,
which involves a 2
5
-D basis of constructible elements of all grades. Yet the use we
make of this space is restricted, and the elements are therefore somehow sparse.
52 L. Dorst
Ultimately, the main purpose of the algebraic organization is to keep track auto-
matically of the administration of the meaning of the coordinates of points, lines,
planes, spheres, etc., simultaneous with performing the quantitative computations.
That is in a sense a Boolean selection task of the algebra, which one would intu-
itively expect not to be too expensive. Indeed it has proved possible to limit the
overhead of the use of CGA to about 10% relative to the best available coordinate
code programmed classically. For the computer science techniques that achieve this,
consult [2] and [3]. A warning: before you start using CGA in commercial applica-
tions, be aware that it is covered by a US patent [6].
References
1. Doran, C., Lasenby, A.: Geometric Algebra for Physicists. Cambridge University Press, Cam-
bridge (2000)
2. Dorst, L., Fontijne, D., Mann, S.: Geometric Algebra for Computer Science, An Object-
Oriented Approach to Geometry. Morgan Kaufman, San Mateo (2007). Second revised printing
2009. See also www.geometricalgebra.net
3. Fontijne, D.: Efficient implementation of geometric algebra. Ph.D. Thesis, U. of Amsterdam
(2007). See also www.science.uva.nl/~fontijne
4. Fontijne, D., Dorst, L.: Efficient algorithms for factorization and join of blades. This volume
5. Hestenes, D.: New tools for computational geometry and the rejuvenation of screw theory. This
volume
6. Hestenes, D., Rockwood, A., Li, H.: System for encoding and manipulating models of objects.
US Patent 6,853,964, granted 8 February 2005

Engineering Graphics in Geometric Algebra
Alyn Rockwood and Dietmar Hildenbrand
Abstract We illustrate the suitability of geometric algebra for representing struc-
tures and developing algorithms in computer graphics, especially for engineering
applications. A number of example applications are reviewed. Geometric algebra
unites many underpinning mathematical concepts in computer graphics such as vec-
tor algebra and vector fields, quaternions, kinematics and projective geometry, and
it easily deals with geometric objects, operations, and transformations. Not only are
these properties important for computational engineering, but also for the computa-
tional point-of-view they provide. We also include the potential of geometric algebra
for optimizations and highly efficient implementations.
1 Introduction
Computer graphics relies heavily on geometric models and methods. Geometric al-
gebra is a mathematical framework to easily describe geometric concepts and op-
erations. It allows us to develop algorithms fast and in an intuitive way. Geometric
algebra is based on the work of Hermann Grassmann (see the conference [45] cele-
brating his 200th birthday in 2009) and William Clifford [14, 15]. Pioneering work
has been done by David Hestenes, who first applied geometric algebra to problems
in mechanics and physics [24, 26].
A. Rockwood (
)
Geometric Modeling and Scientific Visualization Research Center, King Abdullah University
of Science and Technology, Thuwal, Saudi Arabia
e-mail: alynrock@yahoo.com
A. Rockwood
e-mail: alyn.rockwood@kaust.edu.sa
E. Bayro-Corrochano, G. Scheuermann (eds.), Geometric Algebra Computing,
DOI 10.1007/978-1-84996-108-0_3, © Springer-Verlag London Limited 2010
53
54 A. Rockwood and D. Hildenbrand
2 Benefits of Geometric Algebra for Computational Engineering
We first highlight some properties of geometric algebra that make it advantageous
for graphics engineering applications.
2.1 Unification of Mathematical Systems
In the wide range of engineering applications many different mathematical systems
are currently used. One notable advantage of geometric algebra is that it subsumes
mathematical systems like vector algebra, complex analysis, quaternions, Plucker
coordinates, and tensor analysis. Applications described in Sect. 3 will illustrate
this advantage.
2.2 Uniform Handling of Different Geometric Primitives
Conformal geometric algebra, the geometric algebra of conformal space we focus
on, is able to treat different geometric objects such as points, vectors, lines, circles,
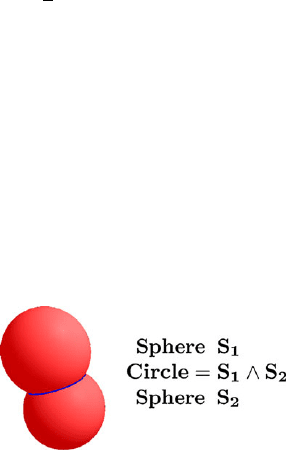
spheres, and planes as the same entities algebraically. Consider the spheres of Fig. 1,
for instance. These spheres are simply represented by
S =P −
1
2
r
2
e
∞
(1)
based on their center point P , their radius r, and the basis vector e
∞
which rep-
resents the point at infinity. The circle of intersection of the spheres is then easily
computed using the outer product to operate on the spheres as simply as if they were
vectors:
Z =S
1
∧S
2
. (2)
This way of computing with geometric algebra clearly benefits applications
like kinematics, pose estimation, and other computer graphics applications as seen
in Sect. 3.
Fig. 1 Spheres and circles
are basic entities of geometric
algebra. Operations like the
intersection of two spheres
are easily expressed
Engineering Graphics in Geometric Algebra 55
2.3 Simplified Rigid Body Motion
Rigid body motions in geometric algebra can be described with one compact linear
expression, the so-called screw
S =im +e
∞
n (3)
with the Euclidean pseudoscalar i =e
1
∧e
2
∧e
3
includes both rotational and linear
parts described with the 3D vectors m and n (see [25]). The combinations of rota-
tional and linear velocities, forces and torques are also described with the help of
one linear expression.
One result of this property is the improvement of Finite Element methods [9].
2.4 Curl, Vorticity and Rotation
The vector algebra concepts of curl, vorticity, and rotation as expressed in geometric
algebra are defined in any dimension, whereas the cross-product in classical vector
algebra is restricted to three dimensions. Thus geometric calculus enables vector
algebra applications to be considered in any dimensions [13].
2.5 More Efficient Implementations
Geometric algebra as a mathematical language often suggests a clearer structure and
greater elegance in understanding methods and formulae. This regularly results in
more efficiency and lower runtime performance for derived algorithms. In Sect. 5
we present a dramatically improved optimization approach for kinematics. We will
see there that geometric algebra inherently has a large potential for creating opti-
mizations leading to more highly efficient implementations.
3 Some Applications
Computer graphics and the related areas of robotics and computer vision are active
areas of research in geometric algebra. In this section we survey some of these
applications in more detail.
For about a decade, researchers at the University of Cambridge, UK, have applied
geometric algebra to a number of graphics related projects. They started with ideas
in computer vision. Lasenby et al. [31, 32] and Perwass et al. [37, 41, 42] present
some applications dealing with structure and motion estimation as well as with the
trifocal tensor. Rigid-body pose and position interpolation, mesh deformation, and
catadioptric cameras articles using geometric algebra are presented by Cameron
56 A. Rockwood and D. Hildenbrand
et al. [12] and Wareham et al. [54, 55]. Geomerics [53] is a start-up company in
Cambridge specializing in simulation software for physics and lighting, which pre-
sented its new technology allowing real-time radiosity in videogames utilizing com-
modity graphics processing hardware. The technology is based on geometric algebra
wavelet technology.
Dorstetal.[16–18, 33, 34] at the University of Amsterdam, the Netherlands, are
applying their fundamental research on geometric algebra mainly to 3D computer
vision. Zaharia et al. [56] investigated modeling and visualization of 3D polygonal
mesh surfaces using geometric algebra. Currently D. Fontijne is primarily focusing
on the efficient implementation of geometric algebra. He investigated the perfor-
mance and elegance of five models of 3D Euclidean geometry in a ray tracing, an
archetypical computer graphics application [22]. It summarized the investigation
by noting that 5D conformal space was the most elegant, but required appropriate
hardware to become the most efficient as current hardware supported the 4D affine
model. Along this line, research into hardware for geometric algebra continues. The
Amsterdam group developed a code generator for geometric algebras [23]. Also,
there is a book with applications of geometric algebra edited by Dorst et al. [19].
A new book [20] was published recently, which dedicates its major portion to the
issue of geometric algebra calculation.
The first time geometric algebra was introduced to a wider Computer Graphics
audience was through a couple of courses at the SIGGRAPH conferences 2000 and
2001 (see [35]).
Bayro-Corrochano et al. from Guadalajara, Mexico, are primarily dealing with
the application of geometric algebra in the field of computer vision, robot vision
and kinematics. They are using geometric algebra, for instance, for tasks like vi-
sual guided grasping, camera self-localization, and reconstruction of shape and mo-
tion [3]. Their methods for geometric neural computing are used for tasks like pat-
tern recognition [1, 8]. Registration, the task of finding correspondences between
two point sets, is solved based on geometric algebra methods in [47]. Some of their
kinematics algorithms can be found in [7] for the 4D motor algebra and in the con-
formal geometric algebra papers [5, 6] dealing with inverse kinematics, fixation, and
grasping as well as with kinematics and differential kinematics of binocular robot
heads. Books from Bayro-Corrochano et al. with geometric algebra applications are,
for instance, [2] and [4].
At the University of Kiel, Germany, Sommer et al. [51] are applying geometric
algebra to robot vision, e.g., Rosenhahn et al. [48, 49] concerning pose estimation
and Sommer et al. [52] regarding the twist representation of free-form objects. Per-
wass et al. are applying conformal geometric algebra to uncertain geometry with
circles, spheres, and conics [40] to geometry and kinematics with uncertain data
[44] or concerning the inversion camera model [43]. There is a book with applica-
tions of geometric algebra edited by Sommer [50] and a new book about the appli-
cation of geometric algebra in engineering applications by Christian Perwass [38].
Sven Buchholz, together with Kanta Tachibana from the university of Nagoya and
Eckhard Hitzer from the university of Fukui, Japan, do some interesting research
dealing for instance with neural networks based on geometric algebra [10
, 11].
Engineering Graphics in Geometric Algebra 57
In addition to these examples, there are many other applications like geometric
algebra Fourier transforms for the visualization and analysis of vector fields [21]or
classification and clustering of spatial patterns with geometric algebra [46] showing
a wide area of possibilities of advantageously using this mathematical system in
engineering applications.
4 The Geometric Primitives in More Detail
Here, we look into some details of the basic geometric primitives of conformal ge-
ometric algebra as introduced in Sect. 2.2 and listed in Table 1. We especially look
into the representations of spheres and planes and will see that planes are specific
spheres with infinite radius. Increasing the radius of a sphere to infinity, the resulting
plane is described by
π =n +de
∞
(4)
with n being the 3D unit normal vector of the plane, and d the distance of the plane
from the origin. This limit process can be used in order to fit the best suitable object
into a set of points, whether it is a plane or a sphere. A locally estimated sphere can
be used in order to describe local curvature of point clouds [27], while an estimation
of a plane describes vanishing curvature.
4.1 Planes as a Limit of Spheres
Spheres and planes, both, are vectors in conformal geometric algebra. In this section,
we will see how a sphere
S =s +
1
2
s
2
−r
2
e
∞
+e
0
(5)
Table 1 List of the basic geometric primitives provided by the 5D conformal geometric algebra.
The bold characters represent 3D entities (x is a 3D point, n is a 3D normal vector, and x
2
is
the scalar product of the 3D vector x). The two additional basis vectors e
0
and e
∞
represent the
origin and infinity. Based on the outer product, circles and lines can be described as intersections
of two spheres, respectively two planes. The parameter r represents the radius of the sphere and
the parameter d the distance of the plane to the origin
Entity Representation
Point P = x +
1
2
x
2
e
∞
+e
0
Sphere s =P −
1
2
r
2
e
∞
Plane π =n +de
∞
Circle z =s
1
∧s
2
Line l = π
1
∧π
2