Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

20 CHAPTER 1 Introduction
angle w is used to describe the angular displacement
of the pendulum from the vertical, determine the ab-
solute velocity of the pendulum.
Section 1.2.2
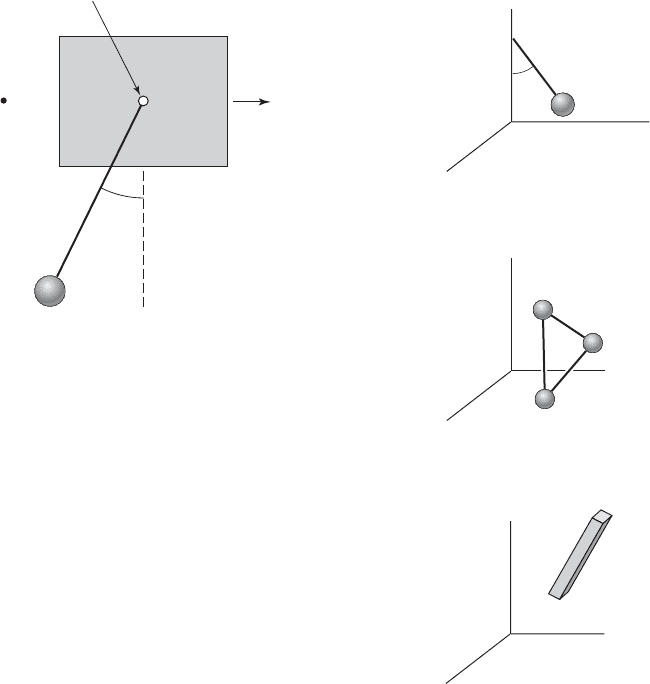
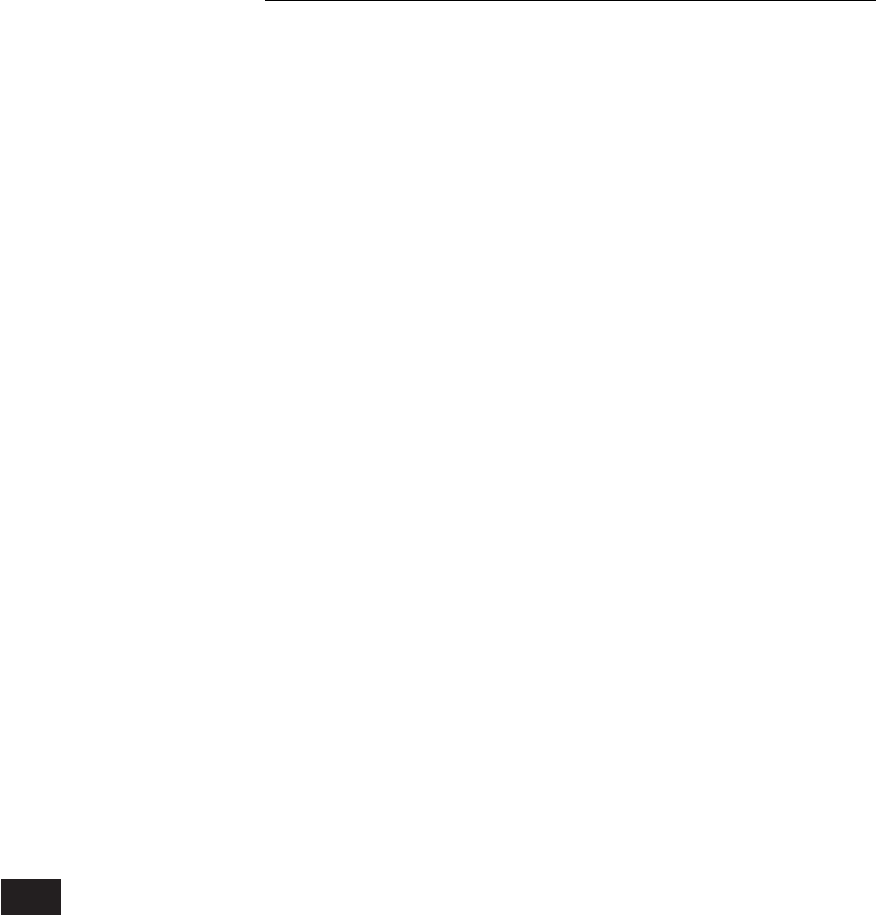
1.7 Determine the number of degrees of freedom for
the systems shown in Figure E1.7. Assume that the
length L of the pendulum shown in Figure E1.7a is con-
stant and that the length between each pair of particles
in Figure E1.7b is constant. Hint: For Figure E1.7c, the
rigid body can be thought of as a system of particles
where the length between each pair of particles is
constant.
Section 1.2.3
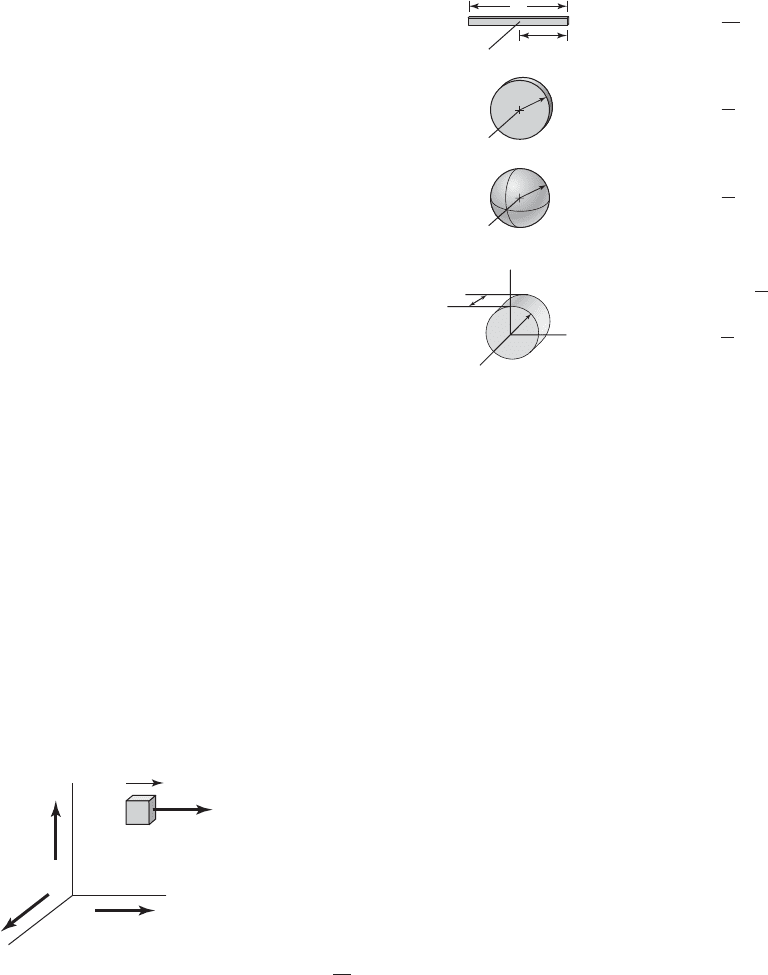
1.8 Draw free-body diagrams for each of the masses
shown in Figure E1.6 and obtain the equations of mo-
tion along the horizontal direction by using Eq. (1.15).
1.9 Draw the free-body diagram for the whole system
shown in Figure E1.6, obtain the system equation of
motion by using Eq. (1.14) along the horizontal direc-
tion, and verify that this equation can be obtained
from Eq. (1.15).
1.10 Determine the linear momentum for the system
shown in Figure E1.5 and discuss if it is conserved.
Assume that the mass of the bar is M
bar
and the dis-
tance from the point O to the center of the bar is L
bar
.
Pivot, O'
x
l
M
O
m
FIGURE E1.6
Z
X
O
Y
Z
X
L
(x
p
, y
p
, z
p
)
O
Y
Z
X
O
Y
(b) System of three particles
(a) Spherical pendulum
(c) Free rigid body in space
FIGURE E1.7
1.11 Determine the angular momentum of the system
shown in Figure 1.6 about the point O and discuss if
it is conserved.
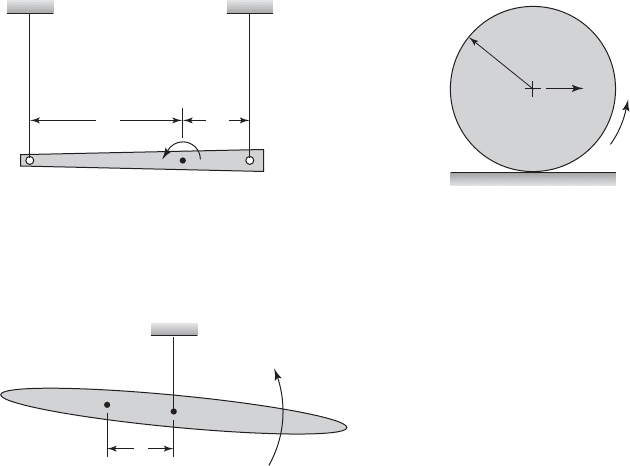
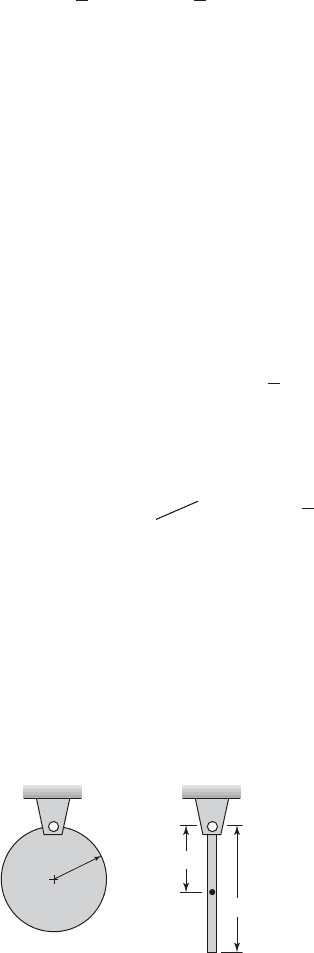
1.12 A rigid body is suspended from the ceiling by
two elastic cables that are attached to the body at the
points O and O, as shown in Figure E1.12. Point G
is the center of mass of the body. Which of these
points would you choose to carry out an angular-
momentum balance based on Eq. (1.17)?
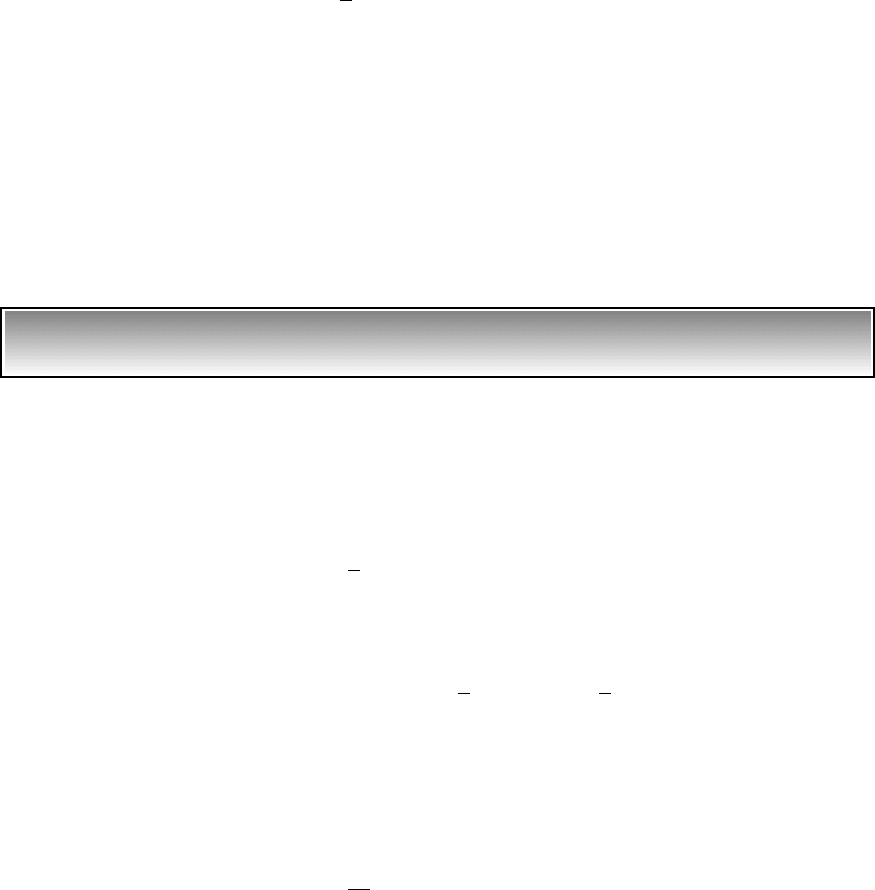
1.13 Consider the rigid body shown in Figure E1.13.
This body has a mass m and rotary inertia J
G
about the
Exercises 21
center of mass G. It is suspended from a point O on
the ceiling by using an elastic suspension. The point
of attachment O is at a distance l from the center of
mass G of this body. M(t) is an external moment ap-
plied to the system along an axis normal to the plane
of the body. Use the generalized coordinates x, which
describes the up and down motions of point O from
point O, and u, which describes the angular oscilla-
tions about an axis normal to the plane of the rigid
body. For the system shown in Figure E1.13, use the
principle of angular-momentum balance given by
Eq. (1.17) and obtain an equation of motion for the
system. Assume that gravity loading is present.
Section 1.2.4
1.14 For the system shown in Figure E1.13, construct
the system kinetic energy.
1.15 Determine the kinetic energy of the planar pen-
dulum of Example 1.1.
1.16 Consider the disc rolling along a line in Fig-
ure E1.16. The disc has a mass m and a rotary inertia
J
G
about the center of mass G. Answer the following:
(a) How many degrees of freedom does this system
have? and (b) Determine the kinetic energy for this
system.
1.17 In the system shown in Figure 1.6, if the mass of
the pendulum is m, the length of the pendulum is r,
and the rotary inertia of the disc about the point O is
J
O
, determine the system kinetic energy.
1.18 Referring to Figure E1.6 and assuming that the
bar to which the pendulum mass m is connected is
massless, determine the kinetic energy for the system.
1.19 Determine the kinetic energy of the system
shown in Figure E1.5.
L
1
L
2
G
m, J
G
O' O"
FIGURE E1.12
l
O
O'
G
M(t)
m, J
G
FIGURE E1.13
r
x
G
m, J
G
FIGURE E1.16
22
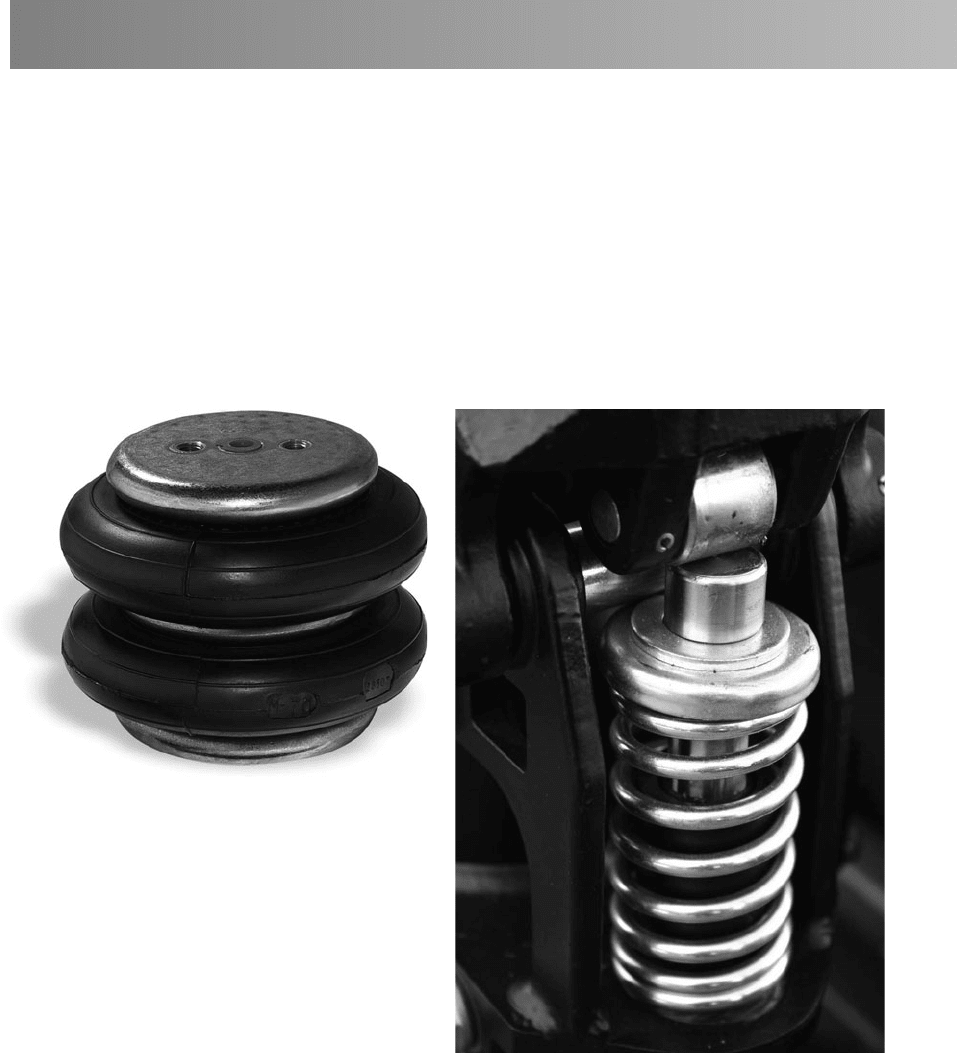
Components of vibrating systems: an air spring and a steel helical spring. (Source: Courtesy of Enidine Incorporated; Stockxpert.com.)
2323
2
Modeling of Vibratory Systems
2.1 INTRODUCTION
2.2 INERTIA ELEMENTS
2.3 STIFFNESS ELEMENTS
2.3.1 Introduction
2.3.2 Linear Springs
2.3.3 Nonlinear Springs
2.3.4 Other Forms of Potential Energy Elements
2.4 DISSIPATION ELEMENTS
2.4.1 Viscous Damping
2.4.2 Other Forms of Dissipation
2.5 MODEL CONSTRUCTION
2.5.1 Introduction
2.5.2 A Microelectromechanical System
2.5.3 The Human Body
2.5.4 A Ski
2.5.5 Cutting Process
2.6 DESIGN FOR VIBRATION
2.7 SUMMARY
EXERCISES
2.1 INTRODUCTION
In this chapter, the elements that comprise a vibratory system model are de-
scribed and the use of these elements to construct models is illustrated with
examples. There are, in general, three elements that comprise a vibrating sys-
tem: i) inertia elements, ii) stiffness elements, and iii) dissipation elements. In
addition to these elements, one must also consider externally applied forces
and moments and external disturbances from prescribed initial displacements
and/or initial velocities.
The inertia element stores and releases kinetic energy, the stiffness ele-
ment stores and releases potential energy, and the dissipation or damping
element is used to express energy loss in a system. Each of these elements has
different excitation-response characteristics and the excitation is in the form
of either a force or a moment and the corresponding response of the element
is in the form of a displacement, velocity, or acceleration. The inertia ele-
ments are characterized by a relationship between an applied force (or mo-
ment) and the corresponding acceleration response. The stiffness elements
are characterized by a relationship between an applied force (or moment)
and the corresponding displacement (or rotation) response. The dissipation
elements are characterized by a relationship between an applied force (or mo-
ment) and the corresponding velocity response. The nature of these relation-
ships, which can be linear or nonlinear, are presented in this chapter. The units
associated with these elements and the commonly used symbols for the dif-
ferent elements are shown in Table 2.1.
In this chapter, we shall show how to:
• Compute the mass moment of inertia of rotational systems.
• Determine the stiffness of various linear and nonlinear elastic components
in translation and torsion and the equivalent stiffness when many individ-
ual linear components are combined.
• Determine the stiffness of fluid, gas, and pendulum elements.
• Determine the potential energy of stiffness elements.
• Determine the damping for systems that have different sources of dissipa-
tion: viscosity, dry friction, fluid, and material.
• Construct models of vibratory systems.
2.2 INERTIA ELEMENTS
Translational motion of a mass is described as motion along the path followed
by the center of mass. The associated inertia property depends only on the to-
tal mass of the system and is independent of the geometry of the mass distri-
bution of the system. The inertia property of a mass undergoing rotational
motions, however, is a function of the mass distribution, specifically the mass
moment of inertia, which is usually defined about its center of mass or a fixed
point O. When the mass oscillates about a fixed point O or a pivot point O, the
rotary inertia J
O
is given by
24 CHAPTER 2 Modeling of Vibratory Systems
TABLE 2.1
Units of Components Comprising a
Vibrating Mechanical System and
Their Customary Symbols
Quantity Units
Translational motion
Mass, m kg
Stiffness, k N
/m
Damping, c Ns
/m
External force, F N
Rotational motion
Mass moment of inertia, J kgm
2
Stiffness, k
t
Nm/rad
Damping, c
t
Nms/rad
External moment, M Nm
(2.1)
where m is the mass of the element, J
G
is the mass moment of inertia about
the center of mass, and d is the distance from the center of gravity to the
point O. In Eq. (2.1), the mass moments of inertia J
G
and J
O
are both defined
with respect to axes normal to the plane of the mass. This relationship be-
tween the mass moment of inertia about an axis through the center of mass G
and a parallel axis through another point O follows from the parallel-axes
theorem. The mass moments of inertia of some common shapes are given in
Table 2.2.
The questions of how the inertia properties are related to forces and mo-
ments and how these properties affect the kinetic energy of a system are ex-
amined next. In Figure 2.1, a mass m translating with a velocity of magnitude
in the X-Y plane is shown. The direction of the velocity vector is also shown
in the figure, along with the direction of the force acting on this mass.
In stating the principles of linear momentum and angular momentum in
Chapter 1, certain relationships between inertia properties and forces and
moments were assumed. These relationships are revisited here. Based on the
principle of linear momentum, which is given by Eq. (1.11), the equation
governing the motion of the mass is
which, when m and i are independent of time, simplifies to
(2.2)
On examining Eq. (2.2), it is evident that for translational motion, the inertia
property m is the ratio of the force to the acceleration. The units for mass
F mx
$
Fi
d
dt
1mx
#
i2
x
#
J
O
J
G
md
2
2.2 Inertia Elements 25
TABLE 2.2
Mass Moments of Inertia about
Axis z Normal to the
x-y Plane and Passing Through
the Center of Mass
L
L/2
R
R
G
h
y
x
z
z
z
z
Slender bar
J
G
J
G
J
G
mL
2
1
12
Circular disk
Sphere
mR
2
1
2
mR
2
2
5
1
12
Circular cylinder
G
R
J
x
J
y
m A3R
2
h
2
B
1
2
J
z
mR
2
Z
X
Fi
.
xi
O
i
k
j
Y
m
FIGURE 2.1
Mass in translation.
shown in Table 2.1 should also be evident from Eq. (2.2). From Eq. (1.22), it
follows that the kinetic energy of mass m is given by
(2.3)
and we have used the identity i i 1. From the definition given by Eq. (2.3),
it is clear that the kinetic energy of translational motion is linearly proportional
to the mass. Furthermore, the kinetic energy is proportional to the second power
of the velocity magnitude. To arrive at Eq. (2.3) in a different manner, let us con-
sider the work-energy theorem discussed in Section 1.2.4. We assume that the
mass shown in Figure 2.1 is translated from an initial rest state, where the ve-
locity is zero at time t
o
, to the final state at time t
f
. Then, it follows from
Eq. (1.26) that the work W done under the action of a force Fi is
(2.4)
where we have used the relation dx dt. Hence, the kinetic energy is
(2.5)
which is identical to Eq. (2.3).
For a rigid body undergoing only rotation in the plane with an angular
speed , one can show from the principle of angular momentum discussed in
Section 1.2.3 that
(2.6)
where M is the moment acting about the center of mass G or a fixed point O (as
shown in Figure 2.2) along the direction normal to the plane of motion and J is
M Ju
$
u
#
T1t t
f
2 T1t t
0
2
0
W
1
2
mx
#
2
x
#
t
f
t
o
mx
$
x
#
dt
x
#
0
mx
#
dx
#
1
2
mx
#
2
W
x
0
Fi
#
dxi
x
0
mx
$
i
#
dxi
x
0
mx
$
dx
T
1
2
m1x
#
i
#
x
#
i2
1
2
mx
#
2
26 CHAPTER 2 Modeling of Vibratory Systems
G
R
L
G
m
L/2
c.g.
m, J
G
(b)(a)
OO
FIGURE 2.2
(a) Uniform disk hinged at a point on its perimeter and (b) bar of uniform mass hinged
at one end.
the associated mass moment of inertia. From Eq. (2.6), it follows that for rota-
tional motion, the inertia property J is the ratio of the moment to the angular
acceleration. Again, one can verify that the units of J shown in Table 2.1 are
consistent with Eq. (2.6). This inertia property is also referred to as rotary in-
ertia. Furthermore, to determine how the inertia property J affects the kinetic
energy, we use Eq. (1.25) to show that the kinetic energy of the system is
(2.7)
Hence, the kinetic energy of rotational motion only islinearly proportional
to the inertia property J, the mass moment of inertia. Furthermore, the ki-
netic energy is proportional to the second power of the angular velocity
magnitude.
In the discussions of the inertia properties of vibratory systems provided
thus far, the inertia properties are assumed to be independent of the dis-
placement of the motion. This assumption is not valid for all physical sys-
tems. For a slider mechanism discussed in Example 2.2, the inertia property
is a function of the angular displacement. Other examples can also be found
in the literature.
1
EXAMPLE 2.1 Determination of mass moments of inertia
We shall illustrate how the mass moments of inertia of several different rigid
body distributions are determined.
Uniform Disk
Consider the uniform disk shown in Figure 2.2a. If J
G
is the mass moment of
inertia about the disk’s center, then from Table 2.2
and, therefore, the mass moment of inertia about the point O, which is located
a distance R from point G,is
(a)
Uniform Bar
A bar of length L is suspended as shown in Figure 2.2b. The bar’s mass is uni-
formly distributed along its length. Then the center of gravity of the bar is lo-
cated at L/2. From Table 2.2, we have that
J
G
1
12
mL
2
J
O
J
G
mR
2
1
2
mR
2
mR
2
3
2
mR
2
J
G
1
2
mR
2
T
1
2
Ju
#
2
2.2 Inertia Elements 27
1
J. P. Den Hartog, Mechanical Vibrations, Dover, NY, p. 352 (1985).
and therefore, after making use of the parallel axis theorem, the mass moment
of inertia about the point O is
(b)
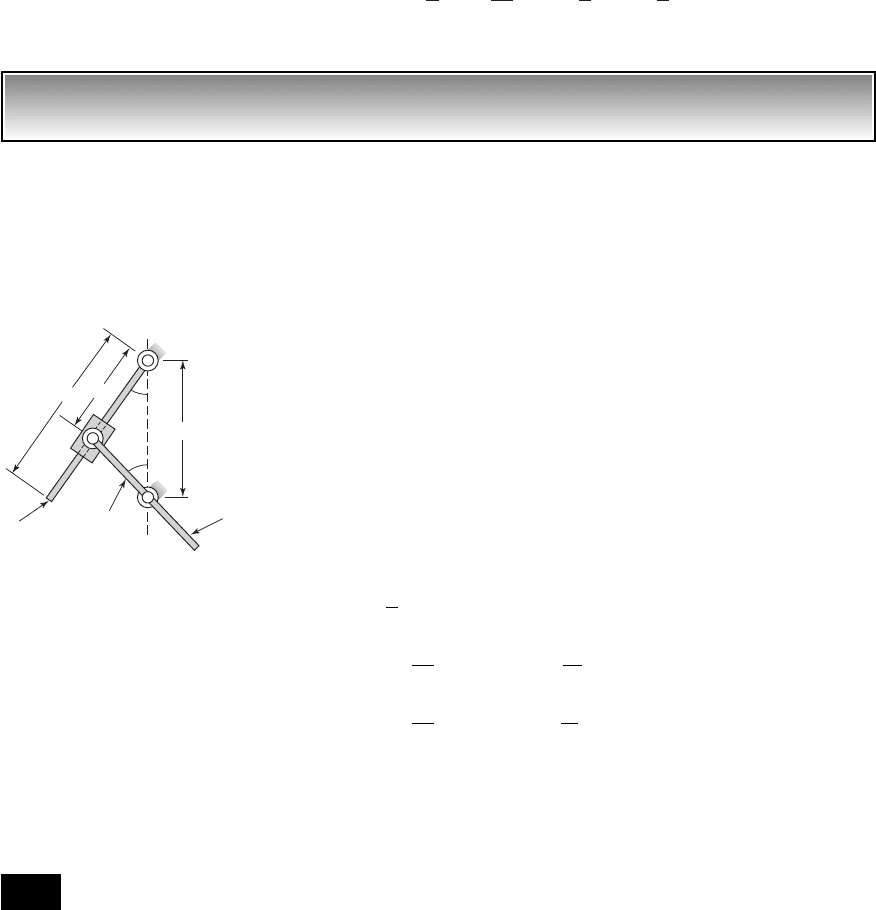
EXAMPLE 2.2
Slider mechanism: system with varying inertia property
In Figure 2.3, a slider mechanism with a pivot at point O is shown. A slider of
mass m
s
slides along a uniform bar of mass m
l
. Another bar, which is pivoted
at point O, has a portion of length b that has a mass m
b
and another portion
of length e that has a mass m
e
. We shall determine the rotary inertia J
O
of this
system and show its dependence on the angular displacement coordinate w.
If a
e
is the distance from the midpoint of bar of mass m
e
to O and a
b
is the
distance from the midpoint of bar of mass m
b
to O, then from geometry we
find that
(a)
and hence, all motions of the system can be described in terms of the angular
coordinate w. The rotary inertia J
O
of this system is given by
(b)
where
(c)
In arriving at Eqs. (b) and (c), the parallel-axes theorem has been used in de-
termining the bar inertias J
m
b
, J
m
e
, and J
m
l
. From Eqs. (b) and (c), it is clear that
the rotary inertia J
O
of this system is a function of the angular displacement w.
2.3 STIFFNESS ELEMENTS
2.3.1 Introduction
Stiffness elements are manufactured from different materials and they have
many different shapes. One chooses the type of element depending on the re-
quirements; for example, to minimize vibration transmission from machinery
J
m
e
1w 2 m
e
e
2
12
m
e
a
2
e
m
e
c
e
2
3
a
2
ae cos1p w2d
J
m
b
1w 2 m
b
b
2
12
m
b
a
2
b
m
b
c
b
2
3
a
2
ab cos w d
J
m
l
1
3
m
l
l
2
,
J
m
s
1w 2 m
s
r
2
1w 2
J
O
J
m
l
J
m
s
1w 2 J
m
b
1w 2 J
m
e
1w 2
a
2
e
1w 2 1e/22
2
a
2
ae cos 1p w2
a
2
b
1w 2 1b/22
2
a
2
ab cos w
r
2
1w 2 a
2
b
2
2ab cos w
J
O
J
G
m a
L
2
b
2
1
12
mL
2
1
4
mL
2
1
3
mL
2
28 CHAPTER 2 Modeling of Vibratory Systems
a
O
r
l
O'
e
m
e
m
l
m
b
m
s
b
FIGURE 2.3
Slider mechanism.
to the supporting structure, to isolate a building from earthquakes, or to
absorb energy from systems subjected to impacts. Some representative types
of stiffness elements that are commercially available are shown in Figure 2.4
along with their typical application.
The stiffness elements store and release the potential energy of a system.
To examine how the potential energy is defined, let us consider the illustra-
tion shown in Figure 2.5, in which a spring is held fixed at end O, and at the
other end, a force of magnitude F is directed along the direction of the unit
vector j. Under the action of this force, let the element stretch from an initial
or unstretched length L
o
to a length L
o
x along the direction of j. In under-
going this deformation, the relationship between F and x can be linear or non-
linear as discussed subsequently.
2.3 Stiffness Elements 29
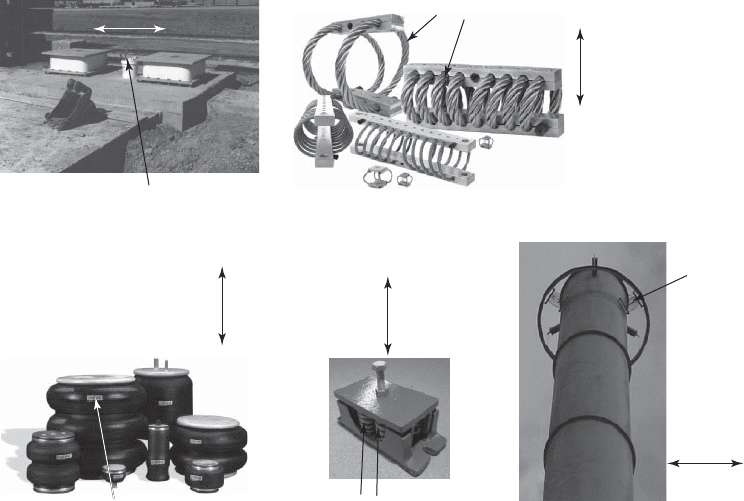
FIGURE 2.4
(a) Building or highway base isolation for lateral motion using cylindrical rubber bearings; (b) wire rope isolators
to isolate vertical motions of machinery; (c) air springs used in suspension systems to isolate vertical motions;
(d) typical steel coil springs for isolation of vertical motions; and (e) steel cable springs used in a chimney tuned
mass damper to suppress lateral motions. Source: Holmes Consulting Group; Wire Rope Catalogue, pg. 6, Enidine
Incorporated, 2006; http://www.enidine.com /Airsprings.html 2006 Enidine Incorporated; Figures of Series C Vibro
Isolators http://www.isolationtech.com/sercw.htm; Figure of Tuned Mass Damper http://www.iesysinc.com/
Tuned_Mass_Dampers.php 2001–2002 Industrial Environmental Sysytems Inc.
(a) (b)
(c) (d) (e)
Motion
Cable
springs
Motion
Motion
Motion
Motion
Wire rope
Spring
Springs
Springs