Awange J.,Grafarend E., Palancz B., Zaletnyik P. Algebraic Geodesy and Geoinformatics
Подождите немного. Документ загружается.

96 7 Solutions of O verdetermined Systems
df
1
:= 2(X
1
− X
0
)dX
1
− 2(X
1
− X
0
)dX + 2(Y
1
− Y
0
)dY
1
−
−2(Y
1
− Y
0
)dY − 2S
1
dS
1
= 0
df
2
:= 2(X
2
− X
0
)dX
2
− 2(X
2
− X
0
)dX + 2(Y
2
− Y
0
)dY
2
−
−2(Y
2
− Y
0
)dY − 2S
2
dS
2
= 0.
(7.39)
Arranging (7.39) with the unknown terms {X
0
, Y
0
} = {x
1
, x
2
} ∈ x on the left-hand-side
and the known terms
{X
1
, Y
1
, X
2
, Y
2
, S
1
, S
2
} = {y
1
, y
2
, y
3
, y
4
, y
5
, y
6
} ∈ y,
on the right-hand-side leads to
J
x
dX
0
dY
0
= J
y
dS
1
dX
1
dY
1
dS
2
dX
2
dY
2
, (7.40)
with
J
x
=
∂f
1
∂X
0
∂f
1
∂Y
0
∂f
2
∂X
0
∂f
2
∂Y
0
=
−2(X
1
− X
0
) −2(Y
1
− Y
0
)
−2(X
2
− X
0
) −2(Y
2
− Y
0
)
, (7.41)
and
J
y
=
∂f
1
∂S
1
∂f
1
∂X
1
∂f
1
∂Y
1
0 0 0
0 0
∂f
2
∂S
2
∂f
2
∂X
2
∂f
2
∂Y
2
=
=
2S
1
−2(X
1
− X
0
) −2(Y
1
− Y
0
) 0 0 0
0 0 0 2S
2
−2(X
2
− X
0
) −2(Y
2
− Y
0
)
.
(7.42)
If we consider that
D{x} = Σ
x
=
σ
2
X
0
σ
X
0
Y
0
σ
Y
0
X
0
σ
2
Y
0
D{y} = Σ
y
=
σ
2
S
1
σ
S
1
X
1
σ
S
1
Y
1
σ
S
1
X
2
σ
S
1
S
2
σ
S
1
Y
2
σ
X
1
S
1
σ
2
X
1
σ
X
1
Y
1
σ
X
1
S
2
σ
X
1
X
2
σ
X
1
Y
2
σ
Y
1
S
1
σ
Y
1
X
1
σ
2
Y
1
σ
Y
1
S
2
σ
Y
1
X
2
σ
Y
1
Y
2
σ
S
2
S
1
σ
S
2
X
1
σ
S
2
Y
1
σ
2
S
2
σ
S
2
X
2
σ
S
2
Y
2
σ
X
2
S
1
σ
X
2
X
1
σ
X
2
Y
1
σ
X
2
S
2
σ
2
X
2
σ
X
2
Y
2
σ
Y
2
S
1
σ
Y
2
X
1
σ
Y
2
Y
1
σ
Y
2
S
2
σ
Y
2
X
2
σ
2
Y
2
,
(7.43)
we obtain with (7.40), (7.41) and (7.42) the dispersion (7.31) of the unknown variables
{X
0
, Y
0
} = {x
1
, x
2
} ∈ x.
7-3 Gauss-Jacobi combinatorial algorithm 97
7-334 The Gauss-Jacobi combinatorial algorithm
The Gauss-Jacobi combinatorial program operates in three phases. In the first
phase, one forms minimal combinations of the nonlinear equations using (7.28) on
p. 93. Using either Gro ebner basis or polynomial resultants, the desired combina-
torial solutions are obtained. The combinatorial results form pseudo-observations,
which are within the solution space of the desired values. This first phase in essence
projects a nonlinear case into a linear case.
Once the first phase is successfully carried out with the solutions of the vari-
ous subsets forming pseudo-observations, the nonlinear variance-covariance/error
propagation is carried out in the second phase to obtain the weight matrix. This
requires that the stochasticity of the initial observational sample be known in-order
to propagate them to the pseudo-observations.
The final phase entails the adjustment step, which is performed to obtain the
barycentric values. Since the pseudo-observations are linearly independent, the
special linear Gauss-Markov model (see Definition 7.1 on p. 87) is employed.
Stepwise, the Gauss-Jacobi combinatorial algorithm proceeds as follows:
• Step 1: Given an overdetermined system with n observations in m unknowns,
using (7.28), form minimal combinations from the n observations that comprise
m equations in m unknowns.
• Step 2: Solve each set of m equations from step 1 ab ove for the m unknowns
using either Groebner basis or polynomial resultant algebraic techniques.
• Step 3: Perform the nonlinear error/variance-covariance propagation to obtain
the variance-covariance matrix of the combinatorial solutions obtained in Step
2.
• Step 4: Using the pseudo-observations of step 2, and the variance-covariance
matrix from step 3, adjust the pseudo-observations via the special linear Gauss-
Markov model to obtain the adjusted position of the unknown station.
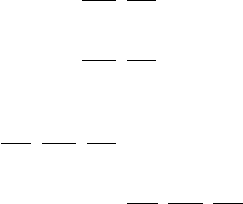
Figure 7.4 summarizes the operations of the Gauss-Jacobi combinatorial algorithm
which employs Groebner basis or p olynomial resultants as computing engines to
solve nonlinear systems of equations (e.g., Fig.7.5).
98 7 Solutions of O verdetermined Systems
or
Combinatorial
appoach
C.F.GaussPosthumous~(1828)
C.G.I.Jacobi(1841)
Overdetermined
problems
Gröbnerbasis
Resultantapproach
Computationalengine
Nonlinearerrorpropagation
LinearGaussMarkov
Solution
Figure 7.4. Gauss-Jacobi combinatorial algorithm
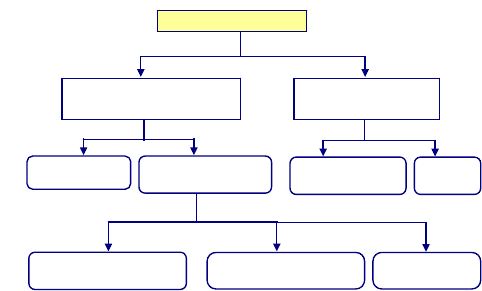
Matlab/Mathematica/Maple
Nonlinearsystemofmultivariatepolynomials
GröbnerBasis
Solution
Multipolynomial
Resultant
Univariatepolynomial
Backsubstitution
Solution
Linear
Homotopy
Figure 7.5. Combinatorial computing engine
7-4 Concluding remarks
In C haps. 4 and 5, Groebner basis and polynomial resultants algorithms were
presented for solving in exact form the nonlinear sys tems of equations. It was
demonstrated in this chapter how they play a leading role in overcoming the ma-
jor difficulty that was faced by C. F. Gauss and C. G. I. Jacobi. The key to success
is to use these algebraic techniques as the computing engine of the Gauss-Jacobi
7-4 Concluding remarks 99
combinatorial algorithm. In s o doing, an alternative procedure to linearized and
iterative numerical procedures that peg their operations on approximate starting
values was presented. Such algebraic technique for solving overdetermined prob-
lems requires neither approximate starting values nor linearization (except for the
generation of the weight matrix). With modern computing technology, the com-
binatorial formation and computational time for geodetic or geoinformatics’ alge-
braic computational problems is immaterial. In the chapters ahead, the power of
this technique will be demonstrated. Further materials on the topic are presented
in [199, 201].
ALESS method has provided a different approach for solving overdetermined
systems by transforming them into square systems. Using this method, the num-
ber of equations equals the number of the unknown variables, independently from
the number of equation of the original system. Consequently, overdetermined sys-
tem can be solved efficiently with this method (unlike Gauss-Jacobi combinatorial
algorithm where the combinatorial explosion impedes the solution of big overde-
termined systems). The s olution of the transformed square system is pos sible also
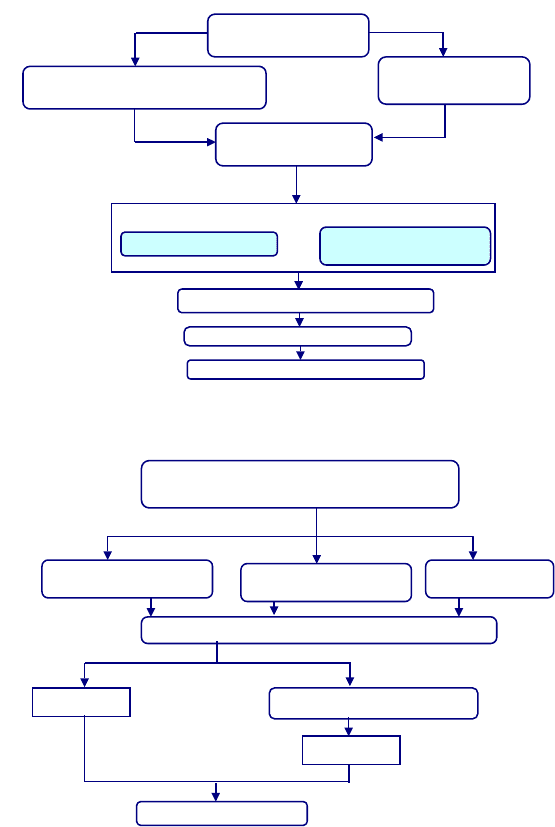
with local and with global methods. Fig. 7.6 gives a summary of the algebraic
algorithms and show when each procedure can be applied.
NonlinearProblems
Nonlinearsystemof
polynomialequations
Overdetermined
problems
Gröbnerbases
Multipolynomial
resultant
Gauss‐Jacobi
combinatorial
F.Macaulay(1902)
formulation
B.Sturmfels(1998)
formulation
ALESS
Dixon‘s
formulation
Figure 7.6. Algebraic solution approach. Here, the nonlinear system of equations implies
determined nonlinear system of equations.
8 Extended Newton-Raphson method
8-1 Introductory remarks
In Chap. 7, we have seen that overdetermined nonlinear systems are common in
geodetic and geoinformatic applications, that is there are frequently more mea-
surements than it is necessary to determine unknown variables, consequently the
number of the variables n is less then the number of the equations m. Mathemati-
cally, a solution for such systems can exist in a least square sense. There are many
techniques to handle such problems, e.g.,:
• Direct minimization of the residual of the system, namely the minimization
of the sum of the least square of the errors of the equations as the objective.
This can be done by using local methods, like gradient type methods, or by
employing global methods, like genetic algorithms.
• Gauss-Jacobi combinatorial solution. Having more independent equations, m,
than variables, n, so m > n, the solution - in a least-squares sense - can be
achieved by solving the
m
n
combinatorial square subsets (n×n) of a set of m equations, and then weighting
these solutions properly. The square s ystems can be solved again via local meth-
ods, like Newton-type methods or by applying computer algebra (resultants,
Groebner basis) or global numerical methods, like linear homotopy presented
in Chap. 6.
• Considering the necessary con dition of the minimum of the least square error,
the overdetermined system can be transformed into a square one via computer
algebra (see ALESS in Sect. 7-2). Then, the square system can be solved again
by local or global methods. It goes without saying that this technique works for
non-polynomial cases as well.
• For the special type of overdetermined systems arising mostly from datum
transformation problems, the so called Procrustes algorithm can be used. There
exist different types of them, partial, general and extended Procrustes algo-
rithms. These methods are global and practically they need only a few or no
iterations.
In this chapter, a special numerical method is introduced, which can solve
overdetermined or underdetermined nonlinear systems directly. In addition, it
is robust enough to also handle determined systems when the Jacobian is ill-
conditioned. Our problem is to solve a set of nonlinear equations
f(x) = 0 (8.1)
where f:R
m
→ R
n
, namely x ∈ R
m
and f ∈ R
n
.
If n = m and the Jacobi matrix has a full rank everywhere, in other words the
system of equations is regular, and if in addition, the initial value of the iteration
J.L. Awange et al., Algebraic Geodesy and Geoinformatics, 2nd ed.,
DOI 10.1007/978-3-642-12124-1 8,
c
Springer-Verlag Berlin Heidelberg 2010

102 8 Extended Newton-Raphson method
is close enough to the solution, the Newton-Raphson method ensures quadratic
convergence. If one of these conditions fails, for example the system is over or under
determined, or if the Jacobi matrix is singular, one can use the Extended Newton-
Raphson method, see e.g. [68, 69, 137, 214, 336]. In addition isolated multiple roots
may cause low convergency. To restore quadratic conve rgence, a deflation method
can be used, see Zhao [435]. Let us illustrate these problems with the following
examples.
8-2 The standard Newton-Raphson approach
Consider the set of nonlinear equations,
f
i
(x
1
, x
2
, . . . , x
n
) = 0, i = 1, . . . , n
which can be written in compact form as
f(x) = 0
We wish to find the set of x
i
satisfying this system, therefore let us to expand it in
a Taylor series about the x
k
iterate, where the superscript k denotes the iterative
number
f
i
x
k+1
= f
i
x
k
+
n
X
j=1
∂f
i
∂x
j
x
k
x
k+1
j
− x
k
j
+ . . .
which define the Jacobian matrix,
J
k
i,j
=
∂f
i
∂x
j
x
k
and the set f
i
x
k+1
= 0. Then,
J
k
x
k+1
− x
k
+ f
x
k
= 0
or the x
k+1
iteration can be expressed as
x
k+1
= x
k
−
J
k
−1
f
x
k
Quadratic convergence means that the number of the correct significant digits is
doubled at each iteration.
8-3 Examples of limitations of the standard approach
8-31 Overdetermined polynomial systems
Let us consider a simple monomial system (see Sommese and Wampler [367]
8-3 Examples of limitations of the standard approach 103
f
1
= x
2
= 0
f
2
= xy = 0
f
3
= y
2
= 0
(8.2)
This system is a “monomial ideal” and trivial for computer algebra. Its Groebner
basis is
G =
y
2
, xy, x
2
(8.3)
whose solutions are,
S = {{y = 0, y = 0}, {x = 0, y = 0}, {x = 0, x = 0}}. (8.4)
We can see that the origin is an isolated s ingular root with multiplicity of 3.
Global polynomial solvers using numerical Groebner basis can also solve this sys-
tem. However, the standard Newton-Raphson method fails, since the system is
overdetermined, although we can transform the overdetermined s ystem into a de-
termined one in a least squares sense. The objective function is the sum of the
square of the residium of the equations,
W = x
4
+ x
2
y
2
+ y
4
. (8.5)
Considering the necessary conditions for the minimum, we obtain the following
system,
g
1
= 4x
3
+ 2xy
2
= 0
g
2
= 2x
2
y + 4y
3
= 0
(8.6)
Then, using the Newton-Raphson metho d, with initial values ( x
0
= 1, y
0
= 1), the
result is,
x = 1.78642 × 10
−8
, y = 1.78642 × 10
−8
,
The convergence is slow and the accuracy of the solution is poor (even if the initial
guess are changed) because of the existence of multiple roots, see e.g. Chapra and
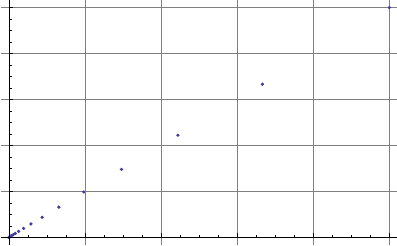
Canale [106]. Fig. 8.1 s hows the steps of the iterations.
0.2
0.4
0.6
0.8
1.0
x
0.2
0.4
0.6
0.8
1.0
y
Figure 8.1. Slow convergence for the case of multiple roots (i.e., a plot of x versus y
solutions starting with x = 1, y = 1).

104 8 Extended Newton-Raphson method
The norm of the e rror of the pro ce dure after 45 iteration steps is 2.52639 × 10
−8
.
Even global minimization with genetic algorithm will give a bad approximation,
x = 1.82247 × 10
−8
, y = 5.29274 × 10
−9
The reason for the s low convergence, as well as for the poor accuracy, is the
increasing multiplicity of the roots (x = 0, y = 0) from 3 up to 9, after transforming
the overdetermined system (f
1
, f
2
, f
3
) into a s quare one (g
1
, g
2
).
8-32 Overdetermined non-polynomial system
A usual test problem for parameter estimation procedures is the Bard [56] problem.
The prototype equation of the system of these nonlinear equations is,
f
i
=p
1
+
b
i
c
i
p
2
+ d
i
p
3
− a
i
= 0 (8.7)
where the numerical values of the coefficients are presented in Table 8.1.
Table 8.1 (Coefficients of the Bard equations):
i a
i
b
i
c
i
d
i
1 0.14 1 15 1
2 0.18 2 14 2
3 0.22 3 13 3
4 0.25 4 12 4
5 0.29 5 11 5
6 0.32 6 10 6
7 0.35 7 9 7
8 0.39 8 8 8
9 0.37 9 7 7
10 0.5 10 6 6
11 0.73 11 5 5
12 0.96 12 4 4
13 1.34 13 3 3
14 2.1 14 2 2
15 4.39 15 1 1
We have 15 equations and 3 unknown parameters, (p
1
, p
2
, p
3
). The system is
overdetermined and not a polynomial one. In this case, the global polynomial
solver, as well as the Newton-Raphson method, fail. The minimization of the sum
of square of errors of the equations,
W (p
1
, p
2
, p
3
) =
15
X
i=1
f
2
i
(8.8)
can be done directly via global minimization using, e.g., genetic algorithm leading
to,
8-3 Examples of limitations of the standard approach 105
p
1
= 0.0679969, p
2
= 0.889355, p
3
= 2.57247.
Alternatively, the overdetermined problem can be transformed into a determined
one, like in the case of polynomials (see ALESS). The necessary conditions of the
minimum.
g
j
(p
1
, p
2
, p
3
) =
∂W
∂p
j
= 0, j = 1, 2, 3 (8.9)
To solve this system (g
1
, g
2
, g
3
), the Newton-Raphson method can be successful,
with initial values (p
10
, p
20
, p
30
) = (1, 1, 1) leading to,
p
1
= 0.0679969, p
2
= 0.889355, p
3
= 2.57247
However, the method may fail, when the starting values are far from the solution
and the Jacobian becomes singular, which is the case when (p
10
, p
20
, p
30
) = (-1, 1,
1). A global polynomial solver provides a solution, but besides the correct solution,
other real solutions also arise (see Table 8.2 ).
Table 8.2 Solution of the square system (g
1
, g
2
, g
3
):
p
1
p
2
p
3
0.170869 + 0.0606932i −5.99409 + 7.168i 9.59168 −7.07904i
0.170869 −0.0606932i −5.99409 − 7.168i 9.59168 + 7.07904i
0.22783 −4.44817 8.44473
0.147587 + 0.0939871i −3.42647 + 2.4683i 6.98725 − 2.33614i
0.147587 −0.0939871i −3.42647 − 2.4683i 6.98725 + 2.33614i
0.216599 −2.61935 6.70349
0.114883 + 0.112266i −1.99681 + 1.21785i 5.51067 − 1.06593i
0.114883 −0.112266i −1.99681 − 1.21785i 5.51067 + 1.06593i
0.181359 −1.55169 5.58774
0.077954 + 0.114988i −1.15986 + 0.720556i 4.62469 − 0.570547i
0.077954 −0.114988i −1.15986 − 0.720556i 4.62469 + 0.570547i
0.120499 −0.852832 4.69769
0.0413009 + 0.102133i −0.621754 + 0.449866i 4.04119 −0.321571i
0.0413009 −0.102133i −0.621754 − 0.449866i 4.04119 + 0.321571i
0.0450109 −0.386462 3.96801
0.0119518 + 0.0689036i −0.227926 + 0.275464i 3.61455 − 0.192522i
0.0119518 −0.0689036i −0.227926 − 0.275464i 3.61455 + 0.192522i
0.0679969 0.889355 2.57247
However, only one positive real solution appears, see last row in Table 8.2. This
is because the determined system has more solutions than the original overdeter-
mined system. In addition, the computation time will also increase.
8-33 Determined polynomial system
Now let us consider a determined system of polynomial equations, which is a
somewhat modified version of the example of Ojika [314],
f
1
(x, y) = x
2
+ y − 3
f
2
(x, y) = x +
y
2
8
− 1
(8.10)
106 8 Extended Newton-Raphson method
First, let us try to solve the problem using the Newton-Raphson method, starting
with (x
0
= -1, y
0
=-1). The result is
x = 1.56598, y = 1.27716
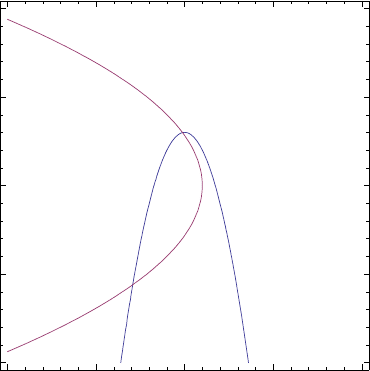
which is not correct (compare with Fig. 8.3). The norm of error is 1.06057. The
situation is the same with (x
0
= 1, y
0
= -1) which gives
x = 1.27083, y = 1.57379.
Again, this is not a s olution. The norm of error is 0.061036, so the Newton-Raphson
method fails.
f
1
x,y
0
1
0
5
0
5
10
1
0
5
0
5
10
x
y
Figure 8.2. Real roots of the system of the two polynomials of Eqn. 8.10
8-34 Underdetermined polynomial system
Let us consider the following underdetermined system, see Quoc-Nam Tran [337]
f
1
= (x − u)
2
+ (y − v)
2
− 1
f
2
= 2v(x − u) + 3u
2
(y − v)
3wu
2
− 1
(2wv − 1)
(8.11)
It goes without saying that the system has infinite roots. To make the solution
unique, one may consider the solution with the minimal norm. This constraint
leads to the following minimization problem,