Awange J.,Grafarend E., Palancz B., Zaletnyik P. Algebraic Geodesy and Geoinformatics
Подождите немного. Документ загружается.

6-4 Solving nonlinear equations via homotopy 75
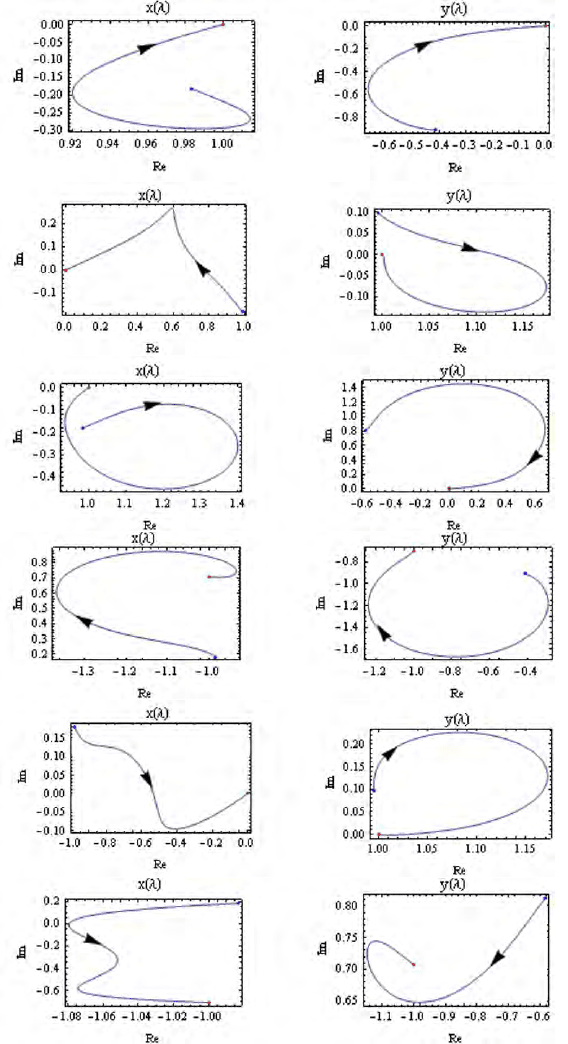
Figure 6.8. Homotopy paths starting from the six starting values expressed by (6.43)-
(6.48)

76 6 Linear homotpy
Table 6.4. Homotopy solutions of the system de scribed by Eqs. (6.31)-(6.32)
x y
0. 1.
0. 1.
1. 0.
1. 0.
−1. −0.707107i −1. + 0.707107i
−1. + 0.707107i −1. − 0.707107i
Computations can be easily achieved using the CAS system Mathematica, as illus-
trated in the Appendix A-3 where this example is solved.
Some features of our Mathematica implementation are as follows:
1. Direct computation of the homotopy paths using the standard Ne wton-
Raphson method.
2. Computation of the homotopy paths using numerical integration. An implicit
differential equation system can be transformed into an explicit one by com-
puter algebra for the case of 6-8 variables, or special numerical techniques
without inversion can be used for the case of higher dimensions.
3. Computation of a proper start system using Bezout’s theorem for systems
of multivariate polynomial equations, providing initial values for all paths of
roots.
4. Visualization of the paths of all trajectories for the case of arbitrary numbers
of variables and systems.
Generally, all of these functions can be parameterized freely, that is the start
system and the type of linear homotopy can be defined by the user. In addition,
any computation can be carried out to any degree of precision.
6-5 Concluding remarks
As demonstrated in these examples, the linear homotopy method proves to be a
powerful solution tool in solving nonlinear geodetic problems, especially if it is
difficult to find proper initial values to ensure the convergence of local solution
methods. Linear homotopy is robust and enlarges the convergency region of the
local methods. This global numerical method c an be successful when symbolic
computation based on Groebner basis or Dixon resultant fail because of the size
and complexity of the problem. However, to reduce the number of paths to be
traced as indicated by Bezout’s theorem as the upper bound of the number of
solutions, it is important to find a proper starting system to ensure fewer initial
value problems to solve.
This method provides the geodesy community with an additional powerful
mathematical tool that is useful, not only in root finding, but also in solving
6-5 Concluding remarks 77
complex problems that can be transformed into systems of p olynomial equations.
We have also shown that it offers faster computations and in some cases solves
complex problems where existing methods such as Groebner basis or eve n local
numerical methods, such as Newton-type methods, fail.

7 Solutions of Overdetermined Systems
“Pauca des Matura” –a few but ripe – C. F. Gauss
7-1 Estimating geodetic and geoinformatics unknowns
In geodesy and geoinformatics, field observations are normally collected with the
aim of estimating parameters. Very frequently, one has to handle overdetermined
systems of nonlinear equations. In such cases, there exist more equations than
unknowns, therefore “the solution” of the system can be interpreted only in least
squares sense.
In geodynamics for example, GPS and gravity measurements are undertaken
with the aim of determining crustal deformation. With improvement in instrumen-
tation, more observations are often collected than the unknowns. Let us consider a
simple case of measuring structural deformation. For deformable surfaces, such as
mining areas, or structures (e.g., bridges), several observable points are normally
marked on the surface of the body. These points would then be observed from a
network of points set up on a non-deformable stable surface. Measurements taken
are distances, angles or directions which are normally more than the unknown
positions of the points marked on the deformable surface leading to redundant
observations.
Procedures that are often used to estimate the unknowns from the measured
values will depend on the nature of the equations relating the observations to the
unknowns. If these equations are linear, then the task is much simpler. In such
cases, any procedure that can invert the normal equation matrix such as least
squares, linear Gauss-Markov model etc., would suffice. Least squares problems can
be linear or nonlinear. The linear least squares problem has a closed form (exact)
solution while the nonlinear problem does not. They first have to be linearized
and the unknown parameters estimated by iterative refinements; at each iteration
the system is approximated by a linear one.
Procedures for estimating parameters in linear models have bee n documented
in [244]. Press et al. [334] present algorithms for solving linear systems of equa-
tions. If the equations relating the observations to the unknowns are nonlinear
as already stated, they have first to be linearized and the unknown parameters
estimated iteratively using numerical methods. The operations of these numer-
ical methods require some approximate starting values. At each iteration step,
the preceding estimated values of the unknowns are improved. The iteration steps
are repeated until the difference between two consecutive estimates of the un-
knowns satisfies a specified threshold. Procedures for solving nonlinear problems
such as the Steepest-descent, Newton’s, Newton-Rapson and Gauss-Newton’s have
been discussed in [334, 379]. In particular, [379] recommends the Gauss-Newton’s
method as it exploits the structure of the objective function (sum of squares)
that is to be minimized. In [381], the manifestation of the nonlinearity of a
function during the various stages of adjustment is considered. While extending
J.L. Awange et al., Algebraic Geodesy and Geoinformatics, 2nd ed.,
DOI 10.1007/978-3-642-12124-1 7,
c
Springer-Verlag Berlin Heidelberg 2010

80 7 Solutions of O verdetermined Systems
the work of [252] on nonlinear adjustment with respect to geometric interpreta-
tion, [178, 179] have presented the necessary and sufficient conditions for least
squares adjustment of nonlinear Gauss-Markov model, and provided the geomet-
rical interpretation of these conditions. Another geometrical approach include the
work of [83], while non geometrically treatment of nonlinear problems have been
presented by [61, 255, 297, 332, 350, 354].
This Chapter presents different approaches for solving the problem. Two pro-
cedures; the Algebraic LEast Square Solution (ALESS) discussed in Sect. 7-2 and
the Gauss- Jacobi combinatorial approach presented in Sect. 7-3. For the ALESS
approach, the original problem is transformed into a minimization problem con-
structing the objective function symbolically. The overdetermined system is then
converted into a determined one by defining the objective function as the sum of
the square of residuals of the equations. The necessary condition for the mini-
mum is set such that each partial derivatives of the objective function should be
zero. In this case the determined model will consist of as many equations as many
parameters that were in the original overdetermined model.
7-2 Algebraic LEast Square Solution (ALESS)
7-21 Transforming overdetermined systems to determined
Let ∆ be the objective function to be minimized
∆(p
1
, p
2
, ..., p
n
) =
X
f
2
i
, (7.1)
where n is the number of the unknown parameters - p
j
(j = 1 . . . n) - and
f
i
(i = 1 . . . m) are the observational equations. The objective function should
be minimized according to the necessary condition of the minimum,
∂∆
∂p
1
= 0,
∂∆
∂p
2
= 0, . . . ,
∂∆
∂p
n
= 0. (7.2)
Now the system consists of as many equations as the number of the unknown
parameters. The solution of the original, overdetermined system (in least square
sense) will also be the solution of this “square determined system”.
Let us suppose, that our nonlinear system is a system of multivariate polyno-
mial equations, then the following theorem can be considered:
Theorem 7.1. Given m algebraic (polynomial) observational equations, where m
is the dimension of the observation space Y of order l in n unknown variables, and
n is the dimension of the parameter space X. Then there exists n normal equations
of the polynomial order (2l − 1) to be solved with algebraic methods.
This solution will be the algebraic least square solution (ALESS) of the overdeter-
mined system.
7-2 Algebraic LEast Square Solution (ALESS) 81
Proof
Let us consider the following s ystem,
e
1
(x, y) = x
2
+ y − 3
e
2
(x, y) = x +
1
8
y
2
− 1
e
3
(x, y) = x − y
here n = 2, m = 3 and l = 2. The objective function to be minimized is
∆ = e
2
1
+ e
2
2
+ e
2
3
= 10 − 2x − 4x
2
+ x
4
− 6y − 2xy + 2x
2
y +
7
4
y
2
+
1
4
xy
2
+
1
64
y
4
.
The order of the objective function is 2l = 4. The overdetermined system has
one solution from the point of view of least square sense, the minimum of this
objective function.
Now, We need to find the solutions of the original system by solving the deter-
mined problem. Considering the necessary condition for the minimum as
f
1
=
∂∆
∂x
= −2 − 8x + 4x
3
− 2y + 4xy +
1
4
y
2
= 0
f
2
=
∂∆
∂y
= −6 − 2x + 2x
2
+
7
2
y +
1
2
xy +
1
16
y
3
= 0,
one obtains the determined system whose order is 2l − 1 = 3. Solving this square
system leads to 6 complex solutions and 3 real ones. The real solutions are
x
1
= −1.371 y
1
= −0.177989
x
2
= 1.24747 y
2
= 1.27393
x
3
= −2.69566 y
3
= −4.24638,
which upon being substituted to the objective function ∆ results into the residuals
(r
i
) as
r
1
= 8.71186
r
2
= 0.232361
r
3
= 4.48362.
From these residuals, the admissible real solutions is the one which provides the
least value of the residual (r
i
), i.e., the second solution. I n this case, the solution
in least squares sense is
x
2
= 1.24747 y
2
= 1.27393.
♣
82 7 Solutions of O verdetermined Systems
7-22 Solving the determined system
It is possible to find the solutions of the determined square system using local or
global methods. Local methods such as the extended Newton-Raphson (see Chap.
9) or homotopy (see Chap. 7)) can be used if a good initial values are known.
Usually, these initial values can be calculated from the solution of a minimal subset
(see Palancz et al [322, 323, 430]). Using global methods, one should find all of the
real solutions of the determined system representing the original overdetermined
system. This is then followed by selecting solutions that provide the least value of
the objective function.
Let us examine two methods of finding all of the roots of the previous polyno-
mial system. The two main types of the algebraic methods that are at our disposal,
which we have encountered in the previous chapters are:
• symbolic solutions using computer algebra as resultants or Groebner basis
• global numerical methods like linear homotopy
As an illustration, considering our problem, we solve the polynomial system via
reduced Groebner basis using M athematica as
GroebnerBasis[{f
1
, f
2
}, {x, y}, {y}]
GroebnerBasis[{f
1
, f
2
}, {x, y}, {x}],
which leads to
− 318 + 256x −231x
2
− 292x
3
+ 166x
4
+ 186x
5
+ 44x
6
− 56x
7
+ 8x
9
= 0,
− 24576 − 110592y + 147456y
2
− 39168y
3
+ 2016y
5
− 48y
6
+ 104y
7
+ y
9
= 0.
Solving the above univariate polynomials provide the real solution for variable x
as
x
1
= −2.69566 x
2
= −1.371 x
3
= 1.24747,
and those of the variable y as
y
1
= −4.24638 y
2
= −0.177989 y
3
= 1.27393,
which are the same solutions we obtained in the previous section. The solutions
giving minimum residuals are
x = 1.24747 y = 1.27393.
In general, for exact solution of determined systems, NSolve, the built-in function
of Mathematica, which utilize numerical Groebner basis seems to be a good choice.
However, if the system has many roots without physical meaning and one does
not need to compute all of the roots, the linear homotopy of fixed point or Find-
Root built-in Mathematica can be an appropriate method. Whereas the statement
above refers to Mathematica, it is essential for users to know that other algebraic
packages, e.g., Matlab and Maple also have similar capabilities as Mathematica.
7-2 Algebraic LEast Square Solution (ALESS) 83
To demonstrate the global numerical me thod, let us employ the linear homo-
topy. As our example is a polynomial system, we can use the automatically gen-
erated start systems with random complex numbers (see Sect. 6-423). The target
system is given by
f
1
(x, y) = −2 − 8x + 4x
3
− 2y + 4xy +
1
4
y
2
= 0
f
2
(x, y) = −6 − 2x + 2x
2
+
7
2
y +
1
2
xy +
1
16
y
3
= 0.
with x, y variables. The degrees of the polynomials are d
1
= 3 and d
2
= 3. The
start system is given by
g
1
(x, y) = (−0.814932 + 0.579556i)(−0.550639 + 0.834743i + x
3
)
g
2
(x, y) = (0.858366 − 0.513038i)(−0.77 − 0.638044i + y
3
)
and its initial values, the solutions of the start system are presented in Table 7.1.
Table 7.1. Initial values of the homotopy function
x y
−0.193155 + 0.981168i −0.288775 − 0.957397i
−0.193155 + 0.981168i 0.973518 + 0.228612i
−0.193155 + 0.981168i −0.684743 + 0.728785i
−0.753139 −0.657861i −0.288775 − 0.957397i
−0.753139 −0.657861i 0.973518 + 0.228612i
−0.753139 −0.657861i −0.684743 + 0.728785i
0.946294 −0.323307i −0.288775 −0.957397i
0.946294 −0.323307i 0.973518 + 0.228612i
0.946294 −0.323307i −0.684743 + 0.728785i
The number of paths is 9. Employing the direct path tracing technique we get
as solutions in Table 7.2.
Table 7.2. End points of the homotopy paths
x y
−1.371 −0.177989
−0.987112 + 1.25442i 2.21036 + 1.61614i
−2.69566 −4.24638
0.33941 + 0.679091i −0.606933 − 7.81887i
−0.987112 −1.25442i 2.21036 − 1.61614i
0.33941 −0.679091i −0.606933 + 7.81887i
2.0573 + 1.28006i −0.0282082 − 7.43985i
1.24747 1.27393
2.0573 −1.28006i −0.0282082 + 7.43985i
The real solutions are the same as we have seen before. The paths of the good
solution can be seen in Fig. 7.1.
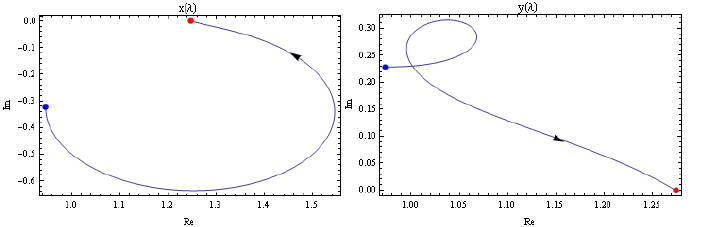
84 7 Solutions of O verdetermined Systems
Figure 7.1. The paths of the good solution
7-3 Gauss-Jacobi combinatorial algorithm
In this section a combinatorial method is presented. The advantage of this method
is that solving a sub-problems in symbolic form, the numerical solution of all of the
combinatorial subproblems can be speedily computed, and using proper weight-
ing technique, the solutions can be e asily achieved. However, the disadvantage of
the method is that for a vastly overdetermined problem, combinatorial explosion
results. To avoid this, one of the appropriate approaches is to solve a few sub-
problems in a closed form and choose the initial solutions that are in the correct
vicinity of the desired solutions and use them as starting values for a least square
optimization. In Mathematica for example, choosing initial solutions that are in
the correct vicinity would involve calling FindMinimum, (Lichtblau, Private Com-
munication) and in Lichtblau[269]. Alternatively, another lo c al method, e.g., the
Extended Newton-Raphson method discussed in Chap. 8 can also be employed
starting with the weighted sub-problem solutions.
7-31 Combinatorial approach: the origin
Presented in this chapter is an alternative approach to traditional iterative numer-
ical procedures for solving overdetermined problems, i.e., where more observations
than unknown exist. This approach, which we call the Gauss-Jacobi combinatorial
has the following advantages:
1. From the start, the objective is known.
2. It does not require linearization.
3. The nee d for iteration does not exist.
4. The variance-covariance matrices of all parameters are considered.
5. It c an be exploited for outlier diagnosis.
The combinatorial approach traces its roots to the work of C. F. Gauss which
was published p osthumously (see Appendix A-2). Whereas the procedures pre-
sented in Chaps. 4 and 5 solve nonlinear systems of equations where the number
of observations n and unknowns m are equal, i.e., n = m, Gauss-Jacobi combina-
torial solves the case where n > m. In Fig. 4.1 on p. 34 for example, two distance

7-3 Gauss-Jacobi combinatorial algorithm 85
measurements from known stations P
1
and P
2
were used to determine the position
of unknown station P
0
. Let us assume that instead of the two known stations,
a third distance was measured from p oint P
3
as depicted in Fig. 7.2. In such a
P
2
P
2
P1
P0
P3
Figure 7.2. Planar distance observations
case, there exist three possibilities (combinations) for determining the position of
the unknown station P
0
. Recall that for Fig. 4.1 on p. 34, two nonlinear distance
equations were written (e.g., 4.1 and 4.2). For Fig. 7.2, systems of distance equa-
tions could be written for combinations {P
1
P
0
P
2
}, {P
1
P
0
P
3
} and {P
2
P
0
P
3
}. For
combination {P
1
P
0
P
2
} for example, one writes
d
2
1
= (x
1
− x
0
)
2
+ (y
1
− y
0
)
2
(7.3)
and
d
2
2
= (x
2
− x
0
)
2
+ (y
2
− y
0
)
2
. (7.4)
Equations (7.3) and (7.4) lead to solutions {x
0
, y
0
}
1,2
as position of the unknown
station P
0
, where the subscripts indicate the combinations used. Combination
{P
1
P
0
P
3
} gives
d
2
1
= (x
1
− x
0
)
2
+ (y
1
− y
0
)
2
(7.5)
and
d
2
3
= (x
3
− x
0
)
2
+ (y
3
− y
0
)
2
, (7.6)
leading to solutions {x
0
, y
0
}
1,3
as the position of the unknown station P
0
. The last
combination {P
2
P
0
P
3
} has
d
2
2
= (x
2
− x
0
)
2
+ (y
2
− y
0
)
2
(7.7)
and