Atkinson K. An Introduction to Numerical Analysis
Подождите немного. Документ загружается.

PROBLEMS 329
38. Evaluate the following singular integrals within the prescribed error toler-
ance.
Do
not
use
an automatic program.
(a)
fo
4
"
cos(u)log(u)
du £ =
10-
8
1
2/fT
( 1 )
(b)
·
0
x
2
sin
~
dx £ =
10-
3
(c)
(d)
{ cos
3
(x)
dx
op
( = 10-8
1
£ =
10-
5
a = 1 - -
'IT
39. Use an adaptive program (e.g., DQAGP) to evaluate the integrals of
Problem 38.
40. (a) Develop the product trapezoidal integration rule for calculating
!(!)
=
1
b/(x)adx
0 X
O<a:::;;1
Put the weights into a convenient form, analogous to (5.6.28) for the
product trapezoidal rule when
w(x)
=
log(x).
Also, give an error
formula analogous
to
(5.6.24).
(b) Write a simple program to evaluate the following integrals using the
results of part (a).
dx
(ii)
11--..,..-,--
0
sin(x
2
1")
Hint: For part (ii), first let u = x
2
1".
41. To show the ill-posedness of the differentiation of a function
y(t)
on an
interval
[0,
1],
consider calculating
x(t)
=
y'(t)
and
xn(t)
=
y;(t),
with
1
Yn(t)
=
y(t)
+
-tn
n
:2::
1
n
Recall the definition of ill-posed and well-posed problems from Section 1.6 .
. Use the preceding construction to show that the evaluation of
x(t)
is
unstable relative to changes in
y. For measuring changes in x and y, use
the maximum norm of (1.1.8) and (4.1.4).
42. Repeat the numerical differentiation example
of
(5.7.23) and Table 5.25,
using your own computer or hand calculator.
43. Derive error results for
DtJ(m)
in (5.7.10) relative to the effects of
rounding errors, in analogy with the results
(5.7.21)-(5.7.22) for
jjp>j(x).
Apply
it
to
f(x)
= ex at x =
0,
and compare the results with the actual
results
of
your own hand computations.
SIX
NUMERICAL METHODS
FOR
ORDINARY
DIFFERENTIAL
EQUATIONS
Differential equations are one
of
the most important mathematical tools used in
modeling problems in the physical sciences. In this chapter we derive and analyze
numerical methods for solving problems for ordinary differential equations. The
main form
of
problem that
we
study
is
the initial value problem:
y'
=
f(x,
y)
(6.0.1)
The
function
f(x,
y)
is to be continuous for all
(x,
y)
in some domain D
of
the
xy-plane, and
(x
0
,
Y
0
)
is
a point
in
D. The results obtained for (6.0.1) will
generalize
in
a straightforward way to both systems of differential equations and
higher order equations, provided appropriate vector and matrix notation is used.
These generalizations are discussed and illustrated in the next two sections.
We
say that a function
Y(x)
is
a solution on
(a,
b]
of (6.0.1) if for all
a~
x
~
b,
1.
(x,
Y(x))
ED:
2.
Y(x
0
)
= Y
0
•
3.
Y'(x)
exists and
Y'(x)
=
f(x,
Y(x)).
As notation throughout this chapter,
Y(x)
will denote the true solution of
whatever differential equation problem is being
cOnsidered:
Example
l.
The general first-order linear differential equation
is
y'
= a
0
(x)y
+
g(x)
as;,xs;,b
in which the coefficients a
0
(x)
and
g(x)
are assumed to be continuous on
(a,
b].
The
domain D for this problem is ·
D =
{(x,y)!a
~
x
s;,
b,
-oo
<y
<co}
.
The
exact solution of this equation can be found in any elementary differential
equations textbook [e.g., Boyce and Diprima (1986), p. 13]. As a special case,
consider
y'
= >.y +
g(x)
Os;,x<oo
(6.0.2)
333
[
I
I
-
-_I
I
I
I
I
I
I
l
I
i
I
334 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
with
g(x)
continuous on
[0,
oo). The solution that satisfies
Y(O)
= Y
0
is
given by
O~x<oo
(6.0.3)
This is used later to illustrate various theoretical results.
2.
The equation
y'
=
-y
2
is
nonlinear. One
of
its solutions is
Y(x)
= 0,
and
the remaining solutions have the form
1
Y{x) =
--
x+c
with
can
arbitrary constant. Note that
IY(-c)l
=
oo.
Thus the global smooth-
ness
of
j(x,
y)
=
-y
2
does not guarantee a similar behavior in the solutions.
To
obtain
some
geo~etric
insight for the solutions
of
a single first-order
differential equation,
we
can look at· the direction field induced by the equation
on
the xy-plane.
If
Y(x)
is
a solution that passes through
(x
0
,
Y
0
),
then the slope
of
Y(x)
at
(x
0
,
Y
0
)
is Y'(x
0
)
=
j(x
0
,
Y
0
).
Within the domain D of
f(x,
y),
pick
a representative set of points
(x,
y)
~d
then draw a short line segment with
slope
f(x,
y)
through each (x,
y).
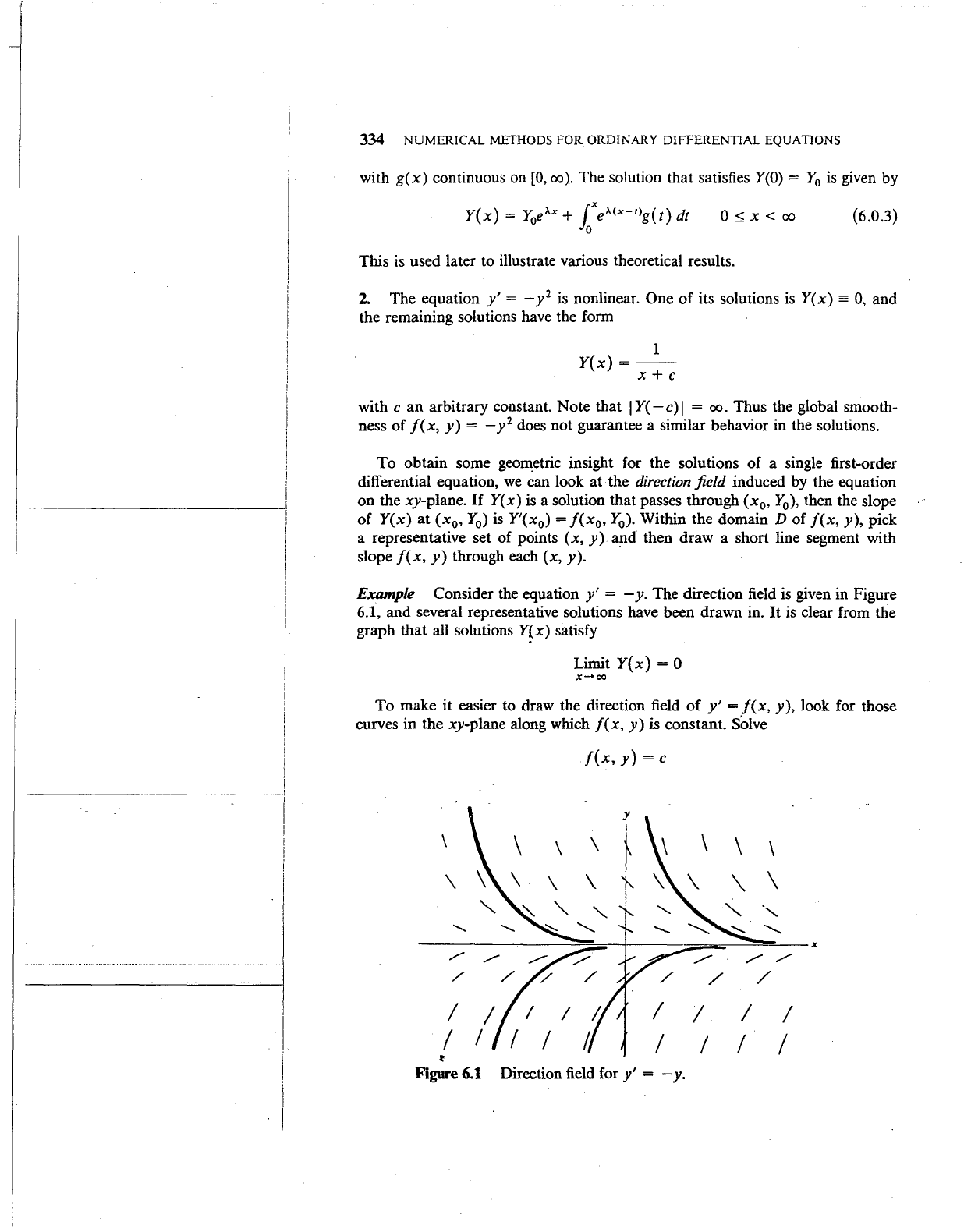
Example Consider the equation
y'
= - y. The direction field is given in Figure
6.1, and several representative solutions have been drawn in.
It
is clear from the
graph that all solutions
Y(x)
satisfy
Limit
Y(x)
= 0
X->CXl
To
make
it
easier to draw the direction field
of
y'
=
f(x,
y),
look for those
curves
in
the xy-plane along which
f(x,
y)
is constant. Solve
J(x,
y)
= c
y
I
\
\
\
\
\
\
\
\ \
\
\
........
........
..........
--x
/
/
/
/
I
I
I
I
I
I
I
I
I
I
~
Figure
6.1
Direction field for
y'
= -
y.
j
I
EXISTENCE, UNIQUENESS,
AND
STABILITY THEORY 335
y
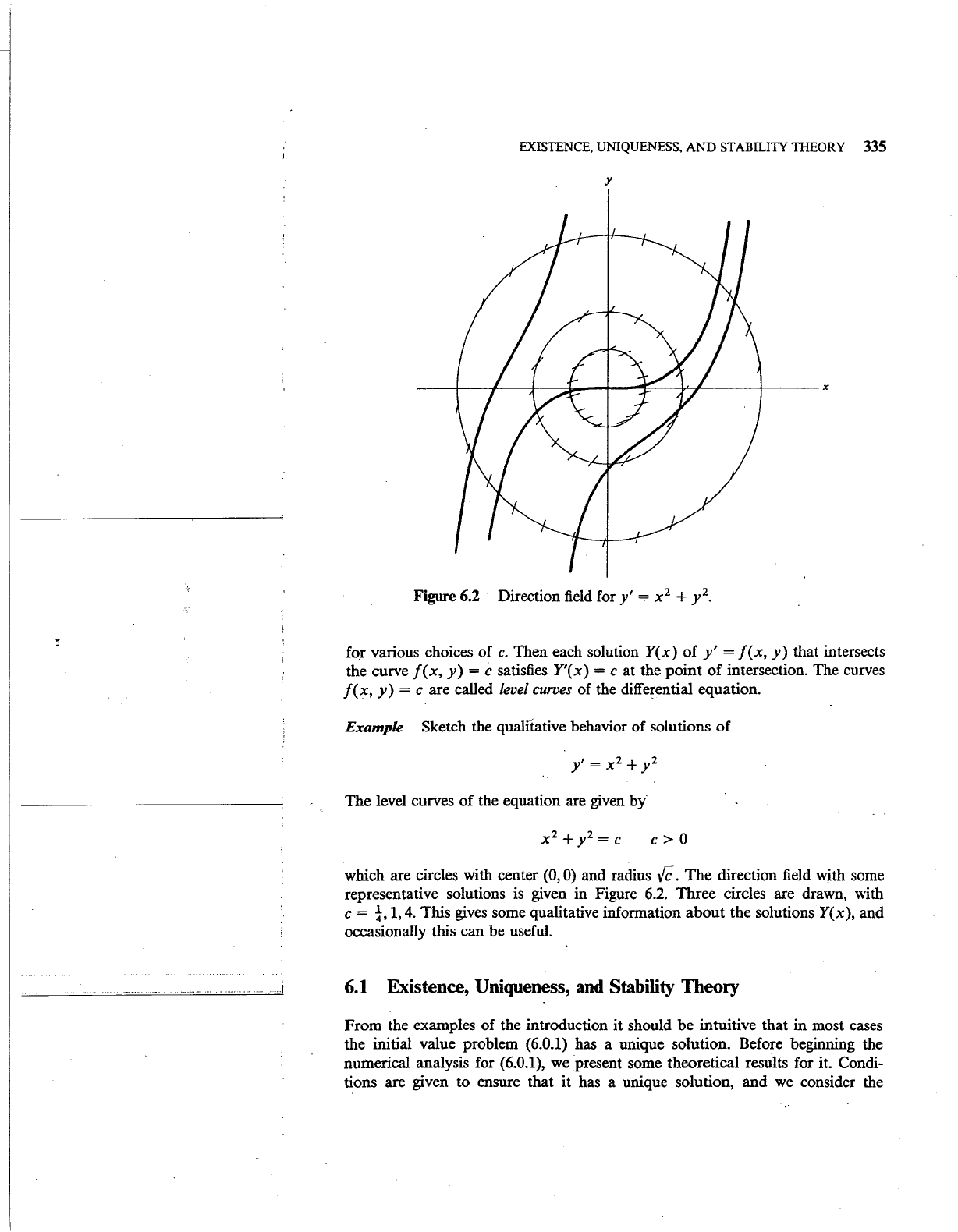
Figure 6.2 · Direction
field
for
y'
= x
2
+ y
2
•
for various choices of
c.
Then each solution
Y(x)
of
y'
=
f(x,
y)
that intersects
the curve
f(x,
y)
= c satisfies
Y'(x)
= c at the point
of
intersection. The curves
f(x,
y)
=care
called level curves of the differential equation.
Example Sketch the qualitative behavior of solutions
of
The level curves of the equation are given by
c>O
which are circles with center (0,0) and radius
/C.
The
direction
field
with some
representative solutions is given in Figure
6.2.
Three circles are drawn, with
c =
~,
1,
4.
This
gives
some qualitative information about the solutions
Y(
x
),
and
occasionally this can be useful.
-"-'==~~=-==.c..-""-'-'----'=~'-"===-'·=i
6.1
Existence, Uniqueness, and Stability Theory
From the examples of the introduction it should
be
intuitive that
in
most cases
the initial value problem
(6.0.1) has a unique solution. Before beginning the
numerical analysis for
(6.0.1),
we
present some theoretical results for it. Condi-
tions are given to ensure that it has a unique solution, and
we
consider the
I
i
I
I
m••~j
336
NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
stability of the solution
when
the initial data Y
0
and the derivative
f(x,
y)
are
changed by small amounts. These results are necessary in order to better
understand the numerical methods presented later. The domain
D will hence-
forth be assumed to satisfy the following minor technical requirement:
If
two
points
(x,
y
1
)
and
(x,
y
2
)
both belong to D, then the vertical line segment joining
them is also contained in
D.
Theorem 6.1 Let
/(x,
y)
be a continuous function of x and y, for all (x,
y)
in
D, and let
(x
0
,
Y
0
)
be an interior point of D. Assume
f(x,
y)
satisfies the Lipschitz condition
all (x, y
1
),
(x,
h)
in D (6.1.1)
for some K
~
0.
Then for a suitably chosen interval I =
[x
0
-
a, x
0
+ a], there
is
a unique solution Y(x) on I of (6.0.1).
Proof
The proof of this result can be found in most texts on the theory of
ordinary differential equations [e.g., see Boyce and Diprima
(1986),
p.
95].
For that reason,
we
omit it. •
Showing the Lipschitz
is
straightforward if
aj(x,
y)/
a y exists and
is
bounded
on
D. Simply let
K=
Max
.
laj(x,y)l
(x,_v)ED
ay
(6.1.2)
Then using the mean value theorem
for some
t between y
1
and y
2
•
Result (6.1.1) follows immediately using (6.1.2).
Example
The following
two
examples illustrate the theorem.
1.
Consider
y'
= 1 + sin (
xy)
with
D = {
(X'
y
)I
0
~
X
~
1'
-
00
< y <
00}
To
compute the Lipschitz constant
K,
use (6.1.2). Then
aj(x,y)
---
= x ·
cos(xy)
ay
K=l.
Thus for any
(x
0
,
Y
0
)
with 0 < x
0
< 1, there is a solution
Y(x)
to the associated
initial
value problem on some interval
[x
0
-
a, x
0
+ a] c
[0,
1].
EXISTENCE, UNIQUENESS, AND STABILITY THEORY
337
2.
Consider the problem
y(O)
= 1
for any constant a >
0.
The solution is
a2
Y(x)
= 2 2
a - x
-a<
x
<a
The solution exists on only a small interval if a is small. To determine the
Lipschitz constant,
we
must calculate
aj(x,
y)
4xy
ay
a
2
To have a finite Lipschitz constant on D, the region D must be bounded in x
and
y,
say - c
~
x
~
c and - b
~
y
~
b. The preceding theorem then states that
there is a solution
Y(x)
on some interval
-a~
x
~a,
with a
~
c.
· Lest it be thought that
we
can evaluate .the partial derivative at the initial
point
(x
0
,
Y
0
)
=
(0,
1) and obtain sufficient information to estimate the Lipschitz
constant
K,
note that
for any
a>
0.
af(0,1)
---=0
ay
Stability of the solution The stability
of
the solution
Y(x)
is
examined when the
initial value problem
is
changed by a small amount. This is related to the
discussion of stability in Section
1.6
of
Chapter 1. We consider the perturbed
problem
y'
=
f(x,
y)
+
8(x).
y(xo)
==
Yo+
t:
{6.1.3)
with the same hypotheses for
f(x,
y)
as in Theorem 6.1. Furthermore,
we
assume
8(x)
is continuous for
all
x such that
(x,
y)
ED
for some
y.
The problem
(6.1.3) can then be shown to have a unique solution, denoted by
Y(x;
8,
t:).
Theorem 6.2 Assume the same hypotheses as in Theorem 6.1. Then the problem
(6.1.3) will have a unique solution
Y(x;
8,
t:)
on an interval
[x
0
-
a, x
0
+a],
some
a>
0,
uniformly for all perturbations
t:
and
8(x)
that satisfy
for
t:
0
sufficiently small.
In
addition, if
Y(x)
is
the solution of the
!
I
I
...
I
338 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
unperturbed problem, then
Max
IY(x)-
Y(x; 8,
€)
I~
k[\£1
+
ajjSII"']
(6.1.4)
lx-xol5a
with k =
1/(1
-
aK),
using the Lipschitz constant K of (6.1.1).
Proof
The
derivation
of
(6.1.4) is much the same as the proof of Theorem 6.1,
and
it can be found in most graduate texts
on
ordinary differential
equations.
•
Using
this result, we can say that the initial value problem (6.0.1)
is
well-posed
or
stable,
in
the sense
of
Section 1.6 in Chapter
1.
If
small changes are made in
the differential equation
or
in the initial value, then the solution will also change
by a small amount.
The
solution Y depends continuously on the data of the
problem, namely the function
f and the initial
data
Y
0
.
It was pointed out in Section 1.6 that a problem could be stable but
ill-conditioned with respect to numerical computation. This is true with differen-
tial equations, although it does not occur often in practice.
To
better
under_stand
when this may happen,
we
estimate the perturbation in Y due to perturbations in
the problem.
To
simplify our discussion,
we
consider only perturbations £ in the
initial value
Y
0
;
perturbations
S(x)
in the equation enter into the final answer in
.much the same way, as indicated in (6.1.4).
Perturbing the initial value
Y
0
as in (6.1.3), let Y(x;
£)
denote the perturbed
solution. Then
Y'(x; e) =
j(x,
Y(x; e))
Y(x
0
;
€)
= Y
0
+ €
X
0
-
0:
:5
X
:=;·
Xn + 0:
(6.1.5)
Subtract
the
corresponding equations
of
(6.0.1) for
Y(x),
and let
Z(x;
e) =
Y(x;
e) - Y(x).
Then
Z'(x;
£)
=
f(x,
Y(x;
!))
-
f(x,
Y(x))
8j(x,
Y(x))
="'
ay
Z(x;
!)
( 6.1.6)
and
Z(x
0
;
€)
=£.The
approximation (6.1.6) is valid when Y(x;
€)
is
sufficiently
close to
Y(x),
which it is for small values
of£
and
small intervals [x
0
-
a,
x
0
+ a].
We can easily solve the approximate differential equation of (6.1.6), obtaining
[
.
x8/(t,
Y(t))
l
Z(x;
€)
,;,
€ • exp f a dt
xo Y
If
the partial derivative satisfies
8f(t,
Y(t))
----~0
ay
(6.1.7)
(6.1.8)
'
_\
EXISTENCE, UNIQUENESS,
AND
STABILITY THEORY
339
then
we
have that
Z(x,
£)probably remains bounded
by£
as
x increases. In this
case, we say the initial value problem
is
well-conditioned.
As an example
of
the opposite behavior, suppose we consider
y'=Ay+g(x)
y(O)
= Y
0
( 6.1.9)
with A >
0.
Then
8fj8y
=A,
and
we
can calculate exactly
Thus the change in Y(x) becomes increasing large as
x increases.
Example
The
equation
y'
= 100y - 101e-x
y(O)
= 1 (6.1.10)
has the solution
Y(x)
=e-x.
The perturbed problem
y'
= 100y - 101e-x
y(O)
= 1 + £
has the solution
Y(x;
€)
=e-x+
t:elOOx
which rapidly departs from the true solution. We say (6.1.10) is an ill-conditioned
problem.
=
For
a problem to be well-conditioned,
we
want the integral
f
x
8f(t,
Y(t))
----dt
Xo
ay
to
be
bounded from above by zero
or
a small positive number, as x increases.
Then the perturbation
Z(x;
£)will be bounded
by
some constant times_£, with
- the constant
not
too large. ·
In
the case that (6.1.8) is satisfied,
but
the partial derivative is large in
magnitude, we will have that
Z(x;
€)
--4
0 rapidly as x increases. Such equations
are considered well-conditioned,
but
they may also be troublesome for most of
the numerical methods of this chapter. These equations are called
stiff
differential
equations,
and
we will return to them later in Section 6.9. ·
Systems of differential equations
The
material
of
this chapter generalizes
to
a
system
of
m first-order equations, written
(6.1.11)
I
I
. . . . . I
-
··-··
··-
····-
··-
340
NUMERICAL
METHODS FOR ORDINARY
DIFFERENTIAL
EQUATIONS
This
is
often made to look like a first-order equation by introducing vector
notation. Let
[
y
1
(x)
j
y(x)
= ;
[
yl.O
j
Y
0
= ; (6.1.12)
Ym(x)
Ym,O
The system (6.1.11) can then be written as
y' =
f(x,
y)
(6.1.13)
By
introducing vector norms to replace absolute values, virtually all of the
preceding results generalize to this vector initial value problem.
For higher order equations, the initial value problem
y<m>
=
f(x,
y, y',
...
,
y<m-1>)
y(xo)
=
Yo,
...
,
y<m-1>(xo)
=
Yo(m-1)
(6.1.14)
can be converted to a first-order system. Introduce the new unknown functions
Y1
= Y
Yz
=
y'
• · · · •
Ym
=
y<m-
1
)
•
These functions satisfy the system
Y~
=
Yz
Y.:.-1
=
Ym
Example
The
linear second-order equation
y"
= a
1
(x)y'
+ a
0
(x)y
+
g(x)
becomes
Yl(xo) =
Yo
h(xo)
=
Yo
In
vector form with
A(x)
denoting the coefficient matrix,
y'
= A ( x )y +
G(
x)
a linear system
of
first-order differential equations.
(6.1.15)