Афанасьев А.А. Математические основы теории систем управления
Подождите немного. Документ загружается.


40 41
,
)()(
),(),(
22
22
22
BA
YX
AYAX
вQвQ
вв
(12.13)
.
,
,
вQ
вQ
в
в
X
Y
arctg
AX
AY
arctg
(12.14)
Уравнение (12.13) при заданных значениях амплитуды
B
, и
частоты
в
внешнего воздействия содержит только одно неизве-
стное – амплитуду
A
вынужденных колебаний:
),(
в
BAA
. (12.15)
При известной зависимости (12.15) фазовый сдвиг
легкоо
вычисляется по формуле (12.14). Уравнение (12.13) для определе-
ния амплитуды может быть до-
статочно сложным. Однако при
любой его сложности возможен
такой простой способ его реше-
ния. Задаемся рядом значений
A
и
в
по формуле (12.13) вы-
числяем амплитуду внешнего
воздействия
B
, т.е. находим се-
мейство зависимостей по пара-
метру
в
:
),,(
в
ABB
(12.16)
из которой несложно получить
зависимость (12.15), показанную
на рис.12.5.
12.3. СКАЧКООБРАЗНЫЙ РЕЗОНАНС ПРИ
ВЫНУЖДЕННЫХ КОЛЕБАНИЯХ
Зависимость амплитуды колебаний
A
от амплитуды внеш-
него воздействия
B
),( BAA
const
в
(12.17)
может, в общем случае, иметь неоднозначный характер (рис.12.6).
const
в
A
B
0
Рис.12.5.Семейство зависимостей
амплитуды вынужденных
колебаний от амплитуды
внешнего гармонического
воздействия по параметру
в
ние режима связано с тем, что
при
пор
BВ
внешнее периоди-
ческое воздействие частоты
в
подавляет ранее суще-
ствовавшее автоколебание час-
тоты
a
- имеет место срыв ав-
токолебаний.
При достаточно высокой
частоте
в
амплитуда вынуж-
денных колебаний
B
может
быть достаточно малой, следо-
вательно будет малой и ампли-
туда колебания ошибки
A
. По-
этому часто при
a
в
ре-
жим захватывания использу-
ют для подавления автоколебаний.
При
пор
BВ
в системе возникают сложные колебания (ре-
жим биений) на частотах внешнего воздействия
в
и собствен-
ной
a
- имеем неодночастотные колебания.
АНАЛИТИЧЕСКИЙ МЕТОД
Уравнение гармонического баланса (12.8), с учетом выраже-
ния (11.14) можно представить в таком виде:
.
)(
)()()(
j
в
Г
вв
BeA
jQ
AKjRjQ
(12.10)
Выделим вещественные и мнимые части в числителе и зна-
менателе. Записанного выражения
,,,)(
вв
Г
вв
AjYAXАKjRjQ
(12.11)
).()()(
ввQb
jYXjQ
(12.12)
Обратим внимание, что составляющие
),(
в
AX
,
),(
в
AY
были уже введены ранее (см. формулу (11.19)).
С учетом введенных обозначений можем получить уравне-
ние для модулей и фраз левых и правых частей выражения (12.10)
пор
B
в
a
0
Область
захватывания
Сложный
процесс
Сложный
процесс
Рис.12.4.Пороговое значение
амплитуды внешнего
гармонического сигнала,
при котором возможно
существование вынужденных
колебаний на частоте
в

42 43
ГЛАВА ТРИНАДЦАТАЯ
УПРАВЛЕНИЕ И УСТОЙЧИВОСТЬ ПРИ НАЛИЧИИ
В СИСТЕМЕ ВЫСОКОЧАСТОТНЫХ КОЛЕБАНИЙ
Эффективным, способом подавления автоколебаний являет-
ся наложение на нелинейное звено вынужденных колебаний дос-
таточно высокой частоты по сравнению с частотой автоколеба-
ний. Такой метод подавления автоколебаний называют вибраци-
онной линеаризацией нелинейной характеристики [11].
Высокочастотные колебания в системе автоматического уп-
равления могут появиться также как внешняя вибрационная поме-
ха, например, из-за вибрации корпуса летательного аппарата [2].
13.1.ПРОЦЕССЫ УПРАВЛЕНИЯ ПРИ НАЛИЧИИ
ВНЕШНЕГО ПЕРИОДИЧЕСКОГО ВОЗДЕЙСТВИЯ
13.1.1.ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
Пусть ко входу нелинейной системы (рис.10.1) приложены два
воздействия:
tBtg
в
sin
1
и
tg
(13.1)
причем
tg
- медленно меняющееся внешнее воздействие по срав-
нению с первым периодическим воздействием
tg
1
. Характер из-
менений этих воздействий таков, что за период первого воздей-
ствия
вв
T
2
второе воздействие остается практически без
изменения. Медленное воздействие
tg
может рассматриваться
как управляющее.
Сигнал ошибки системы ищем в виде:
),()()(
*
0
txtxtx
(13.2)
где
tAtx
в
sin)(
*
– (13.3)
– быстрая (колебательная) составляющая (ее амплитуда
A
и фаза
, в общем случае, допускают медленное изменение);
)(
0
tx
- мед-
ленная составляющая ошибки, обусловленная сигналом управле-
ния
tg
.
В этом случае какому-то
одному уровню внешнего сиг-
нала, может соответствовать
несколько значений амплитуд
вынужденных колебаний.
При вынужденных колеба-
ниях кривой 2 на рис.12.7 будет
отвечать три точки пересече-
ния кривой
),(
в
AZ
с окруж-
ностью радиуса
B
, величина
которого принадлежит интерва-
лу (рис.12.7):
B
<
B
<
B
(12.18)
Из кривой 2 рис 12.6 сле-
дует, что при увеличении
B
на-
блюдаем плавный рост
A
, но
при значении
B
B
происхо-
дит скачкообразный рост амп-
литуды вынужденных колебаний
A
. При последующем умень-
шении амплитуды вешнего воз-
действия
B
имеет место при
B
B
снижение скачком амп-
литуды
A
.
Условием существования
скачкообразного резонанса на
фиксированной частоте вынужденных колебаний является на-
личие у зависимости (12.7) участка (12.18), на котором спра-
ведливо неравенство:
.0
const
в
dB
dA
(12.19)
1
2
A
B
0
B
B
Рис.12.6.Однозначный (кривая 1) и
неоднозначный (кривая 2)
характер зависимости
амплиттуды колебаний
от амплитуды внешнего
воздействия при
const
в
B
B
B
),(
в
AZ
+j
+1
0
Рис.12.7.К обоснованию
скачкообразного резонанса

44 45
Гармоническая линеариза-
ция позволяет аппроксимировать
нелинейную зависимость
)()( txty
следующим выра-
жением:
)cossin(),()(
~
00
CS
ΑxΑty
, (13.9)
Которое можно представить и в другой форме
),(sin),(),()(
~
0000
xΑxΑΑxΑty
, (13.10)
где
2
0
2
00
),(),(),( xΑxΑxΑ
СS
ГГГ
, (13.11)
),(
),(
),(
0
0
0
xΑ
xΑ
xΑ
S
С
Г
Г
arctg
. (13.12)
При символической форме записи выражений (13.1), (13.3),
(13.10) имеем:
tj
в
Βetg
)(
1
,
)(
)(
tj
в
Αetx
, (13.13)
0
Ф(х)
x
0
0
x
t
в
t
в
x
0
)( t
в
Ф
Рис.13.2.Прохождение сигнала
через нелинейное звено с идеальной
релейной характеристикой
При гармоничесеой линеаризации нелинейного звена медлен-
ная составляющая входного сигнала может считаться неизмен-
ной на временном интервале равном периоду быстрой составляю-
щей (рис.13.1, 13,2).
В этом случае имеем :
,sin)(
0
tAxtx
в
(13.4)
где
0
x
- смещение периодическо-
го сигнала.
Временная периодическая зависимость ),( t
будет содер-
жать кроме первой гармоники и постоянную составляющую
2
0
00
sinsin
1
),( dAx
A
xAK
S
Ф
Г
(13.5)
,cossin
1
),(
2
0
00
dAx
A
xAK
С
Ф
Г
(13.6)
,sin
2
1
),(
2
0
000
dAxxA ФФ
(13.7)
где
t
в
. (13.8)
b
0
Ф(х)
x
0
0
x
t
в
t
в
x
0
)( t
в
Ф
Рис.13.1.Прохождение сигнала
через нелинейное звено
типа “ограничение

46 47
В результате решения (13.21) определится зависимость
constconst
ΒxΑΑ
в
,),(
0
. (13.22)
Подставляя это решение в функцию
),(
00
xΑ
получим нели-
нейную зависимость
)),(()(
~
00000
xxΑx
. (13.23)
Можно показать, что нелинейная зависимость (13.23) имеет
вид плавной кривой, проходящей через начало координат, при лю-
бых нелинейностях )(xy
, в том числе релейных и гистерезис-
ных (рис.13.3).
Применяя дифференциаль-
ную линеаризацию зависимости
(13.23) в начале координат, по-
лучим
000
~
xK
, (13.24)
где
tg
0
0
0
0
0
~
x
dx
d
K
.
Таким образом, для нахож-
дения коэффициента
0
K
требует-
ся иметь решение уравнения
(13.21) с целью получения нелинейной зависимости (13.23). Одна-
ко , как легко показать, дифференциальная линеаризация (13.24)
может быть получена и без нахождения решения уравнения (13.21),
так как
0
0
00
0
0
0
0
0
0
),(
~
x
x
x
xΑ
dx
d
K
. (13.25)
Действительно, применительно к правой части выражения
(13.23) имеем
0
0
0
0
0
0
0
000
0
0
)),((
x
x
dx
dΑ
xx
xxΑ
. (13.26)
)(
~
00
x
0
ktg
0
x
0
Рис.13.3.Линеаризация нелинейной
зависимости
)(),(),()(
~
000
txxΑxΑty
Г
, (13.14)
где
),(),(),(),(
00
),(
00
0
xΑjxΑexΑxΑ
CS
xΑj
ГГГГ
. (13.15)
Причем очевидно:
).,(sin),(),(
),,(cos),(),(
000
000
xΑxΑxΑ
xΑxΑxΑ
C
S
ГГ
ГГ
(13.16)
Обращаясь к интегральному уравнению вынужденного дви-
жения (10.33) можем, с учетом формул (13.2), (13.13), (13.14) на-
писать
.)(),(),()()()()(
0
00010
dtxxΑΚxΑktgtgtxx
Г
(13.17)
Это уравнение разобьем на два, относящихся соответствен-
но к медленным и быстрым процессам
0
000
),()()( dxΑktgx
, (13.18)
0
01
)(*)(),()()(* dtxkxΑΚtgtх
Г
, (13.19)
Последнее уравнение можно, по аналогии с уравнением (12.4),
привести к виду
)(
),()(1
1
)(*
1
0
tg
xΑjW
tх
в
Г
. (13.20)
С учетом формул (13.1), (13.13) из уравнения (13.20) следует
j
в
ΒexΑΚjW ),()(1
0
Г
. (13.21)
Задаваясь различными значениями
0
x
это уравнение, как и
уравнение (12.8), можно решить графическим или аналитическим
методами ( см. раздел 12.2) при известных значениях амплитуды
B
и частоты
в
внешнего периодического воздействия.

48 49
где
)()( tgLpG
,
)()( tkLpW
- передаточная функция линей-
ной части системы.
Коэффициент
0
K
называют, коэффициентом усиления не-
линейности в процессе управления при наложении быстрого
периодического процесса или коэффициентом вибрационной
линеаризации нелинейности для процесса управления.
Коэффициент
0
K
, как следует из формулы (13.25), определя-
ется равенством
0
0
00
0
0
),(
x
x
xΑ
Κ
, (13.31)
в котором нелинейность
),(
00
xΑ
задается формулой (13.7). Из
этой формулы и выражения (13.31) следует, что коэффициент
0
K
является функцией только амплитуды
C
A
симметричных (
0
0
x
)
вынужденных колебаний ошибки
)(
00 C
ΑΚΚ
. (13.32)
Для рассмотренной выше характеристики с насыщением
(рис.13.1) получим
)(arcsin
2
0
bΑ
Α
b
Κ
C
C
tg
. (13.33)
Для аналогичной характеристики, но с зоной нечувствитель-
ности (рис.10.12) справедливо
CC
Α
a
Α
b
Κ arcsin(arcsin
2
0
tg
. (13.34)
Коэффициенты усиления нелинейности типа релейных харак-
теристик соотвественно с зоной нечувствительности (рис.10.16) и
общего вида (с гистерезисными петлями рис.10.18) вычисляют-
ся по формулам
22
0
2
aΑ
C
Κ
C
, (13.35)
Согласно формуле (13.7) получим
0sin
2
1
sin
2
0
0
0
0
d
xΑ
Αx
x
, (13.27)
поскольку функция
0
0
x
x
является четной, а интеграл (13.27)
от произведения четной функции на нечетную равен нулю.Поэто-
му из формулы (13.26) следует равенство (13.25).Это значит, что
для определения коэффициента дифференциальной линеаризации
0
K
нет нужды находить решение (13.22) и вычислять нелинейную
зависимость (13.23). Достаточно взять частную производную по
0
x
в точке
0
0
x
от известной для каждой нелинейности зависи-
мости (13.7).
С учетом полученной зависимости (13.24) уравнение (13.18)
для медленного процесса управления получит вид (при отсутствии
"замораживания" времени t).
0
000
)()()()( dtxkΚtgtx
. (13.28)
Видим, что это уравнение, как уравнение (13.19) для вынуж-
денного периодического процесса, является линейным.
При приложении управляющего воздествия
)(tg
в момент вре-
мени 0
t к системе, находящейся в покое, (а не в момент вре-
мени
t
для вынужденного процесса) уравнение (13.28), в со-
ответствии с формулой (9.5), запишится так
t
dxtkKtgtx
0
000
)()()()(
. (13.29)
При переходе от временных зависимостей к изображениям
по Лапласу получим из формулы (13.29) с учетом зависимости
(9.4):
)(
)(1
1
)(
0
0
pG
pWΚ
px
, (13.30)
50 51
13.1.2.ПРАКТИЧЕСКИЕ ПРИМЕРЫ.
ПРИМЕР 13.1
Вибрационное сглаживание и вибрационная линеаризация
нелинейности при помощи вынужденных вибраций
Нелинейная зависимость )(xy
, допускающая скачки и ги-
стерезисные петли, по отношению к медленному сигналу управ-
ления
)(
0
tx
трансформируется в монотонную однозначную нели-
нейную зависимость
00
~
x
, проходящую через начало коорди-
нат (рис.13.3).
Переход от функции
x
, у которой аргумент
xxx
0
со-
держит быструю и медленную составляющие, к функции
0
~
x
,
зависящей, только от медленной составляющей управления, на-
зывается вибрационным сглаживанием нелинейности для процес-
са управления.
Слабо нелинейная зависимость
0
~
x
в результате диффе-
ренциальной линеаризации в начале координат может заменена ли-
нейной функций.
000
~
xΚ
. (13.39)
Переход от сглаженной (вторичной) нелинейности
00
~
x
к
линейной зависимости (13.39) называют вибрационной линеариза-
цией нелинейности.
Практическая реализация вибрационного сглаживания пока-
зана на рис.13.5.
Непосредственно на вход нелинейного звена (например, ре-
лейного элемента) прикладывается гармоническое (вибрационное)
воздействие
tΒtg
в
sin)(
1
с частотой, превышающей полосу про-
Рис.13.5.Практическая реализация вибрационного сглаживания
tΒtg
в
sin)(
1
)(tg n
x
1
x
x
2
x
3
x
Линейное
звено 1
Линейное
звено 2
Нелиней-
ное
звено Ф(x)
Осталь-
ная часть
системы
2222
0
)(
11
mbΑbΑ
C
Κ
CC
. (13.36)
Амплитуда симметричных колебаний
C
A
, как показано в пре-
дыдущем параграфе, может определяться графически или анали-
тически. Она зависит от амплитуды и частоты внешнего воздей-
ствия, а также от параметров
ii
ΤΚ ,
линейной части системы
(см. (13.21))
),(
вCC
ΒΑΑ
. (13.37)
Качественный вид зависимости (13.37) показан на рис.12.5.
Амплитуда
C
A
может вычисляться также в функции какого-либо
параметра системы
ii
ΤΚ ,
(рис.12.2,в).
),(
iiCC
ΤΚΑΑ
,
const
B
,
const
в
. (13.38)
Графики на рис.13.4 а,б построены соответственно по форму-
лам (13.33),(13.36).
0
K
0
K
C
A
C
A
0 0
b
b
x
y
b
b
x
y
0
а) б)
Рис.13.4.Графики построены соответственно по формулам
(13.33)–а),(13.36)–б).

52 53
рис. 13.1, обеспечивает ограничение скорости привода) имеем
сигнал вида (13.2), состоящий из медленной (управляющей) и бы-
строй (вибрационной) составляющих.
Процесс управления описывается линейным операторным
выражением (13.30), характеристическое уравнение которого имеет
вид
0)()(
0
pRΚpQ
, (13.43)
где
0
Κ
- коэффициент усиления нелинейности, зависящий от амп-
литуды и частоты внешнего вибрационного воздействия
tΒtg
в
sin)(
1
. (13.44)
Следовательно, параметры вибрационной помехи (13.44) че-
рез коэффициент оказывают влияние на характер распределения
на комплексной плоскости корней характеристического уравнения
(13.43), т.е. от этих помех будет зависеть качество процесса уп-
равления и устойчивость системы.
Обычно с ростом амплитуды
Β
вибрационной помехи систе-
ма приближается к границе устойчивости. Предельное значение
амплитуды
Β
, до которого система остается еще устойчивой, на-
зывается границей устойчивости системы к вибрационным поме-
хам [2].
13.2.ПРОЦЕССЫ УПРАВЛЕНИЯ В
АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМАХ
Среди систем автоматического управления встречаются ав-
токолебательные системы, у которых частота автоколебаний вы-
бирается много больше спектра возможных частот процесса уп-
равления.
Поэтому переменная на входе нелинейного звена может быть
представлена двумя составляющими
)()()(
*
0
txtxtx
, (13.45)
где
)(
0
tx
- медленная составляющая по сравнению с автоколеба-
тельной (быстрой)
)(tx
, обусловленная управляющим воздействи-
ем (см.рис.10.1);
пускания последующего линейного звена 2. Поэтому вынужден-
ные колебания отсутствуют на выходе этого звена.
Сигнал на входе нелинейного звена содержит быструю (
*
x
) и
медленную (
0
x
) составляющую
*
0
xxx
,
где
310
xxx
,
ttgx
в
sin)(
1
*
.
В этом случае, как следует из формулы (13.3),
0;
AB . (13.40)
Наличие внешнего периодического сигнала позволяет ликви-
дировать гистерезисную петлю и зону нечувствительности реле
для медленного (управляющего) сигнала
)(tg
.
Для этого сигнала нелинейное звено будет представлено только
коэффициентом усиления
0
Κ
. Например, для релейного элементаа
с зоной нечувствительности (рис. 10.16,а) коэффициент
0
Κ
мож-
но определить по формуле (13.35) с учетом равенства (13.40)
aB
aΒ
C
Κ
,
2
22
0
. (13.41)
Амплитуда
B
вибрационного воздействия должна обеспе-
чивать срабатывание элемента при максимальном значении сиг-
нала управления:
max
0
xaΒ
, (13.42)
где
0
x - максимальное значение медленного сигнала на входе не-
линейности, до которого требуется обеспечить линейность релей-
ного элемента.
ПРИМЕР 13.2
Устойчивость к вибрационным помехам нелинейной системы
В летательных аппаратах высокочастотная вибрация корпу-
са может передаваться оси гироскопа, вызывая ее быстрое дви-
жение относительно пространственных осей аппарата. Управляю-
щее воздействие на руле аппарата вызывает медленное движение
оси гироскопа относительно пространственных осей аппарата. Та-
ким образом, на выходе нелинейности в цепи управления электро-
привода руля (эта нелинейность типа “насыщение”, показанная на

54 55
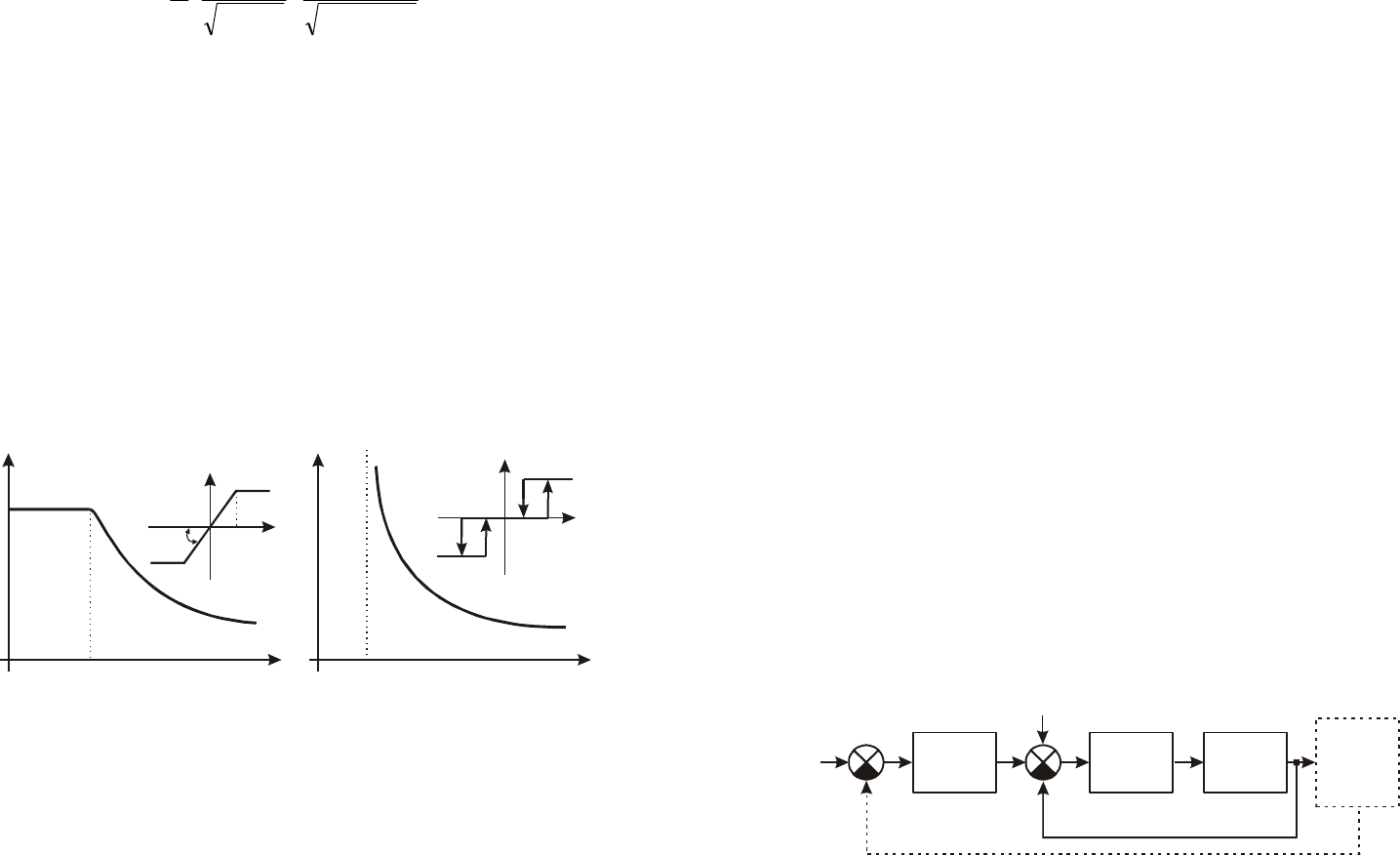
Рис.13.6.Автоколебательный контур с нелинейным звеном, линейной
частью и цепью обратной связи
n
x
1
x
x
2
x
Линейная
часть
Нелинейное
звено
Линейная
обратная
связь
Параметры этого контура выбираются такими, чтобы,
во-первых, частота автоколебаний была достаточно высо-
кой по сравнению с частотой сигнала управления, во-вторых,
амплитуда автоколебаний
Α
была не меньше возможных
)(
0
tx
на входе нелинейного звена
max
0
xΑ
2. При наличии вибрационного сглаживания нелинейнос-
ти процессы управления рассчитываются при замене нели-
нейного звена коэффициентом усиления
0
Κ
.
3. Зона нечувствительности и петли гистерезиса устра-
няются.
4. Коэффициент усиления нелинейности
0
Κ
является фун-
кцией амплитуды
C
Α
симметричных автоколебаний быст-
рой составляющей на входе нелинейного звена. Поэтому из-
менение
C
Α
оказывает влияние на качество управления и ус-
тойчивость системы в целом.
;sin)(
*
Αtx
t
. (13.46)
При отсутствии внешнего периодического воздействия
)0)((
1
tg
из уравнения (13.20) для быстрой составляющей
)(tx
следует равенство
0),()(1
0
xΑΚjW
Г
. (13.47)
Медленная составляющая удовлетворяет уравнению (13.30).
Из выражения (13.47), задаваясь произвольным значением
0
x
,
можем, как показано в параграфе 11.2, найти амплитуду и частоту
автоколебательной составляющей, как функции смещения
0
x
:
),(
0
xΑΑ
)(
0
x
. (13.48)
Если нелинейность однозначная (без гистерезисных петель),
то коэффициент гармонической линеаризации нелинейности
),(
0
xΑΚ
Г
является вещественным и, как видно из рис. 11.2, не
оказывает влияние на частоту автоколебаний
. Последняя бу-
дет определяться свойствами линейной части системы и не будет
зависеть от составляющей управления
0
x
.
Коэффициент усиления нелинейности
0
Κ
в уравнении управ-
ления (13.30) зависит от амплитуды симметричных автоколеба-
ний, т.е. колебаний при
0
0
x
. Его значение можно найти по фор-
мулам (13.33) - (13.36).
Особенности управления
1. За счет автоколебательных вибраций любая нелиней-
ная характеристика, в том числе скачкообразная и гистере-
зисная, трансформируется в зависимость
)(
~
~
000
x
, кото-
рая близка к линейной зависимости
000
~
xΚ
,
где
0
0
0
0
0
~
x
x
d
Κ
- коэффициент усиления нелинейного звена.
Это вибрационное сглаживание нелинейности реализуется
путем создания автоколебательного контура с нелинейным зве-
ном, линейной частью и цепью обратной связи (рис.13.6).

56 57
В первом приближении это решение может соответствовать
и системе высокого порядка, если корни
j
2,1
(14.2)
выбраны ближайшими к мнимой оси.
Для нелинейной системы аналогичное приближение можно
представить в виде
sinax , (14.3)
Причем величины
a
,
,
связаны дифференциальными
уравнениями
a
at
da
,
at
d
, (14.4)
из которых при const
и
const
следуют выражения (14.1).
Дифференцируя по времени (14.3) с учетом (14.4), получим
sincos aapx . (14.5)
Из формул (14.3), (14.5) следует
a
x
sin
;
x
a
p
cos
. (14.6)
При гармонической линеаризации нелинейности )(xy
име-
ем из (10.10) и (14.6)
x
p
ΚΚΚΚay
СSCS
)()cossin(
~
ГГГГ
, (14.7)
В этой формуле множитель в круглой скобке перед перемен-
ной
x
можно рассматривать как передаточную функцию гармо-
нически линеаризованного нелинейного звена
,)()(),(
p
aΚaΚa
p
Κ
СS
ГГГ
(14.8)
где коэффициенты гармонической линеаризации
)(aΚ
S
Г
и
)(aΚ
C
Г
определяются как функции амплитуды по известным формулам
(см. параграф 10.2.3).
Принимая во внимание характеристическое уравнение ли-
неаризованной замкнутой системы (11.16), получим
ГЛАВА ЧЕТЫРНАДЦАТАЯ
ОЦЕНКА КАЧЕСТВА КОЛЕБАТЕЛЬНЫХ ПЕРЕХОДНЫХ
ПРОЦЕССОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Будем рассматривать собственные колебания в нелинейной
системе, ( 0)(
tg ). Эти колебания могут быть затухающими или
расходящимися (рис.14.1). У первых амплитуда уменьшается до
нуля или до амплитуды автоколебаний, у вторых амплитуда возра-
стает до амплитуды автоколебаний или неограничена у неустой-
чивой системы.
Частота колебаний в переходном процессе также испытыва-
ет изменения.
Необходимо рассчитать быстроту изменения амплитуды и
частоты колебаний.
14.1.МЕТОД ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ
ПЕРЕХОДНЫХ ПРОЦЕССОВ В ПЕРВОМ
ПРИБЛИЖЕНИИ
Для линейной системы второго порядка (с двумя комплекс-
но-сопряженными корнями) колебательный переходный процесс
описывается уравнением
,sin)( ttax
,)(
0
t
eatа
(14.1)
где частота
и показатель затухания
величины неизменные.
а) б)
)(
t
x
)(tx
)(ta
)(
t
a
0
a
0
a
C
a
t
t
0 0
Рис. 14.1.Затухающие колебания

58 59
Эта информация фиксируется в так называемых диаграммах
качества, которые представляют собой семейства кривых
(рис.14.2)
),(kaa
const
; (14.13)
),(kaa
const
. (14.14)
Для линейных систем эти кривые имели бы вид вертикаль-
ных прямых, так как в этом случае коэффициент затухания и час-
тота не зависят от амплитуды колебаний (они будут зависеть от
значения параметра k ).
Кривая 0
соответствует незатухающим автоколебаниям
с постоянной амплитудой (например,
С
aa
для точки C ). Этаа
линия выражает зависимость амплитуды автоколебаний от пара-
метра k .
a
0
a
0
0
a
0const
0
0const
Область устойчивого
равновесия при
0
a
Область автоколебаний
Линии
const
C
a
0
k
k
М
L D
C
E
Рис.14.2. Диаграммы качества
0)(),()(
pRa
p
ΚpQ
Г
. (14.9)
Из уравнения (14.8) найдем пару комплексно-сопряженных
корней (именно им соответствует колебательный переходный про-
цесс), ближайших к мнимой оси. Для чего выполним в (14.8) по-
становку
jp .
Будем иметь
0)()()()( jRajΚaΚjQ
CS
ГГ
. (14.10)
Полученное комплексное уравнение содержит три неизвест-
ных величины:
a
,
,
. Из него можно найти две величины как
функции третьей
),(a
)(a
. (14.11)1)
Зависимости (14.11) позволяют с помощью уравнений (14.4)
рассчитать колебательный процесс (14.3) для переменной )(tx .
Действительно, интегрируя первое дифференциальное урав-
нение (14.4) после подстановки в него известной функции )(a
,
получим зависимость амплитуды
a
от времени
)(taa
.
Интегрируя второе дифференциальное уравнение (14.4) с под-
становкой в него функций
)(a
и )(ta , находим
)(t
.
В результате из (14.3) получаем решение
)(sin)( ttax
. (14.12)
14.2.ДИАГРАММЫ КАЧЕСТВА ПЕРЕХОДНЫХ
ПРОЦЕССОВ
Для оценки качества системы нахождение решения (14.12)
обычно не требуется. Достаточно определить зависимости пока-
зателей
и
от амплитуды и от какого-либо параметра k
линейной части системы.