Зяпаев А.А. Лекции - Теоретические основы автоматизации управления
Подождите немного. Документ загружается.

72
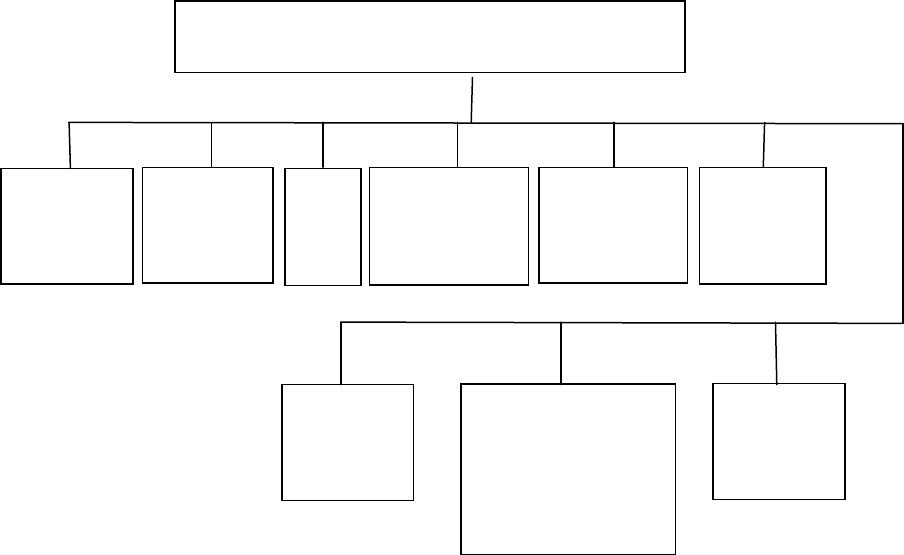
В целом все приведенные компьютерные технологии как прикладные
программные средства обеспечения управленческой деятельности можно
представить в виде обобщенной схемы.
Системы
подготовки
тестовых
документов
Системы
подготовки
табличных
документов
Личная
информацион-
ная система
СУБД
Системы
подготовки
графических
документов
Системы
управления
проектом
Экспертные
системы и
СППР
Системы
интеллектуального
проектирования и
совершенствования
системы
управления
Прочие
Прикладные программные средства обеспечения
управленческой деятельности

73
6.2. Моделирование управления
Виды моделей
Постоянное изменение условий деятельности, вызванное изменчивостью
среды задач и внешней среды требует инноваций с целью обеспечения
выживания и успеха в современном мире. Руководителям не всегда ясно
какие изменения нужны, нет уверенности в их успешности. Известно, что
экономические системы обладают не только краткосрочными реакциями на
изменения, но и такими, проявление которых произойдёт только в будущем.
Поведение таких систем не поддаётся интуитивному предвидению,
эксперимент ограничен временными, финансовыми и другими
соображениями. Поэтому управление экономическими системами часто
граничит с искусством.
Важнейшим инструментом решения управленческих задач является
модель, т.е. способ преобразования входной информации в выходную.
Модель, как таковая, не может быть использована в практике управления
непосредственно, хотя и описывает реальные свойства экономической
организации, на всё же является её «карикатурой». Она отражает только
существенные, с точки зрения разработчика, свойства. Однако модель
является мощным вспомогательным инструментом в информационном
обеспечении управленческой деятельности, позволяет выполнять
аналитическую работу, прогнозирование, проверку реализуемости решений,
оценку последствий.
Существуют различные классификации моделей управления
экономическими объектами. Однако, при всём многообразии, они обладают
некоторыми общими свойствами. Исходя из этого можно выделить наиболее
широко используемые модели.
Абстрактные – математические, мысленные; физические – макеты,
реальные объекты. Имитационные – см. подробное описание в книге
[Бусленко В.Н. Автоматизация имитационного моделирования сложных
систем. М.: Наука, 1977г., 219с.].
Имитационное моделирование используется для изучения сложных
систем. Для этого сложную систему представляют описанием всех её
элементов и описанием взаимодействия между ними. Внешняя среда,
воздействующая на систему так же рассматривается состоящей из элементов.
Учитывают только те её составляющие, которые связаны с системой.
Систему можно рассматривать как статическую, так и динамическую. В
первом случае модель её может быть представлена в виде
Y = F(X, H),
во – втором
Y(t) = F(X, H, t),
где X и X(t) множество внешних воздействий, причём X(t) = (x
1
(t), x
2
(t), …,
x
n
(t)),
H и H(t) – множество внутренних состояний, причём H(t) = (h
1
(t), h
2
(t), …,
h
k
(t)),
74
Y и Y(t) – множество выходных характеристик, на которых отражается
множество внешних воздействий и внутренних состояний, причём Y(t) =
(y
1
(t), y
2
(t), …, y
m
(t)).
F – оператор связи между внутренними элементами, входящими
возмущениями и выходящими характеристиками. Этот оператор может быть
представлен в виде системы уравнений или определённых алгоритмов ЭВМ.
В статических моделях отсутствует фактор времени t. Динамическая
система в каждый данный момент времени t (из множества T) находится в
состоянии z
t
(из множества Z) и способна переходить в момент времени t из
одного состояния в другое под воздействием внешних и внутренних причин.
При этом совершается движение Z(t), т.е. система изменяет своё состояние в
виде скачка в новое состояние внутри пространства Z в точку z
i
и т.д.
Таким путём можно построить модель любого типа (см. стр. 74а, 74б).
Наиболее употребительными моделями являются:
1. Дискретно – детерминированные, применяемые для описания
объектов, в которых отсутствуют случайные процессы, или они
настолько несущественны, что ими можно пренебречь; а так же
объекты, процессы в которых изменяются во времени и
представительно могут описываться временными рядами
(экономические системы, финансовые, рыночные и другие).
Описываются математическими уравнениями, имеющими
аналитическое решение.
[ Цена P
t
товара образуется на основе спроса и предложения его на рынке.
Спрос D
t
=K
1
-k
1
P
t
, где K и k – коэффициенты пропорциональности;
предложение S
t
ориентировано на цену с запаздыванием на один шаг
S
t
=K
2
+k
2
P
t-1
. Равновесие определяется при D
t
= S
t
, или
k
1
P
t
+k
2
P
t-1
= K
1
– K
2
.
P
t
=R(-k
2
/k
1
)
t
– общее решение (x).
P
t
=R(-k
2
/k
1
)
t
+ (K
1
-K
2
)/(K
1
+K
2
)– общее решение (xx).
R – произвольная константа. В.В. Годин стр. 67. ]
2. Непрерывно-детерминированные, используются для описания и
исследования объектов с доминирующими характеристиками: а)
случайности в работе объекта отсутствуют или ими пренебрегают; б)
процессы непрерывные. Описание объектов – дифференциальные
уравнения, когда независимая переменная (время t) одна; если
зависимость не от одной независимой переменной, - тогда уравнения в
частных производных.
3. Дискретно – стохастические, используются для описания объектов
обладающих статистически закономерным случайным поведением.
(xx)
(x)
75
Время в них рассматривается как дискретная величина. Пример:
производство и складирование готовой продукции. Описание: конечно-
разностные уравнения, среди переменных используются функции,
задающие случайные процессы. Кроме того в них используются
вероятностные автоматы.
4. Непрерывно-стохастические, объекты с непрерывным характером
изменения состояния во времени и наличием случайности. Пример:
системы массового обслуживания. Природа этих систем неоднородна –
экономические, производственные, технологические, технические и
другие.
Их общие свойства:
- стохастический характер функционирования (случайность заявок,
требований);
- наличие входящего и выходящего потока заявок;
- последовательность событий происходит одно за другим в случайные
моменты времени;
- определение некоторой дисциплины обслуживания (FIFO – первый
пришёл, первый вышел);
- и др.
Приведённые модели могут быть описаны разными методами:
дифференциальными уравнениями, системами алгебраических уравнений,
параметрическими зависимостями, в алгоритмическом виде, матричном и
другими. Однако сущность этих моделей как правило сводится к
приведённым четырём классам.
Помимо рассмотренных существует класс схем формализованного
описания, которые содержат в себе различные формы описания. Они в
состоянии заменить все частные, но они сложнее, приводят к значительному
увеличению объёма вычислений. Тем не менее существуют процессы,
описание которых даёт хорошие результаты только обобщенным путём. Их
достоинство – унификация математического описания. [Подробности: 1)
Советов Б.Я., Яковлев С.А. Моделирование систем. М.:В.Ш. 1985, 271с. 2)
Бусленко В.Н. Моделирование сложных систем. М.: Наука, 1978г, 400с.]
В заключении остановлюсь на компьютерном моделировании. Это метод
решения задач анализа и синтеза сложных систем на основе её компьютерной
модели. Она заключается в получении полных и точных результатов по
имеющейся модели объекта.
В настоящее время имеется широкий спектр компьютерных
инструментальных средств для моделирования и основанного на нём анализа
экономических явлений. Схемы различные – позволяют построить
стохастические и детерминированные, потоковые и событийные,
нормативные и дескриптивные модели. [DYNAMO, SIMAN, SPSS, Process
model и др.]
Другим путём является построение специального аппарата для
структурно-функционального моделирования. Здесь описание сложных
систем производится с помощью небольшого набора типовых элементов и
76
отображения их как иерархических многоуровневых модульных систем. Это
технологии структурного анализа и проектирования – SADT (Structured
Analysis and Design Technique). Эту технологию другие подходы реализуют
такие пакеты как IDEF0, Design/IDEF, «Case - аналитик». Например IDEF0
позволяет описать связи функций друг с другом по входу-выходу, контролю
и исполнению, описать модель «сущность - связь» (ER-модели), описать
параметры объектов и взаимосвязи между ними при проектировании
структур БД; язык управления потоковыми моделями (Data Flow Diagrams) –
описать связь функциональных и информационных моделей – какие функции
какими потоками данных управляют.

77
Имитационные модели – рациональное построение моделей АСУ в
режиме диалога.
Имитация – это численный метод проведения на ЭВМ экспериментов с
мат. моделями, описывающими поведение сложных систем в течение
заданного периода времени.
Этапы:
1. Первоначальное изучение системы
2. Формулирование мат. модели
3. Предсказание поведения системы с помощью расчета на модели
4. Проведение экспериментов для проверки правильности моделей
Имитация на ЭВМ при реализации этих исследований содержит этапы:
1. Формулирование проблемы
2. Формулирование мат. модели
3. Составление на ЭВМ
4. Оценка пригодности модели
5. Планирование эксперимента
6. Обработка результатов
Имитационную модель оценивает структуру и внутреннее
взаимодействие в системе. Имитационные модели позволяют вмешиваться в
ее работу на новом этапе: обновлять, заменять данные; но в отличие от
методов математического программирования не располагают формальными
методами построения моделей.
Языки имитационной модели GASP, СИМСКРИПТ, GPSS, ДИНАМО,
СТИМУЛА и др. СИМСКРИПТ наиболее эффективен, он сделан на основе
языка ФОРТРАН. GPSS и ДИНАМО – универсальные, простые, но имеют
меньше возможностей (нет оптимизации).
Перспективные сети ЭВМ:
1. Широкие возможности охватывают большое число объектов
2. Режим разделения времени
3. Высок ресурс БД
4. Снижаются ограничения по памяти ЭВМ
Имеются сети:
ARPA Carnegie Mellons PLN, CYCLADES, Collins C-System, TYMNET,
Cybernet фирмы CDC. Есть и с разделением времени: CSE.