Зайцев А.П. Общая электротехника и электроника. Учебное пособие: Часть II
Подождите немного. Документ загружается.


21
В генераторном режиме работы синхронной машины трехфазное на-
пряжение снимается с выходных зажимов статорной обмотки, а в двига-
тельном режиме работы статорная обмотка подключается к источнику
трехфазного напряжения, вследствие чего возникает вращающееся маг-
нитное поле.
В двигательном режиме необходимо каким-либо образом разогнать ро-
тор до частоты вращения, близкой к частоте вращения вращающегося маг-
нитного поля, после чего двигатель втягивается в синхронизм и за счет
взаимодействия магнитных потоков ротора и статора возникает момент
эм
M
.
Очевидно, что магнитный поток статора и ротор должны вращаться
синхронно, иначе будет возникать знакопеременный момент и двигатель
выпадет из синхронизма. Разгон двигателя до подсинхронной частоты
вращения в современных конструкциях осуществляется за счет дополни-
тельной пусковой короткозамкнутой обмотки, размещенной на роторе и
позволяющей осуществить асинхронный пуск. На синхронной частоте
вращения короткозамкнутая обмотка на работу двигателя влияния не ока-
зывает, так как она оказывается неподвижной относительно вращающегося
магнитного потока статора. Стержни пусковой обмотки располагаются в
пазах полюсных наконечников и соединяются на торцах токопроводящими
пластинами.
Явнополюсный ротор содержит сосредоточенную обмотку, а полюсные
наконечники имеют такую форму, чтобы распределение индукции в
воздушном зазоре было синусоидальным (рис. 6.12).
Рис. 6.12
Распределение магнитной индукции в воздушном зазоре в синхронной
машине, имеющей ротор с неявновыраженными полюсами, достигается за
счет равномерного распределения обмотки по окружности ротора.
n
S
N

22
6.2.2 Генераторный режим синхронных машин
На рис. 6.13 приведена схема включения синхронного генератора. Ротор
генератора приводится во вращение от двигателя любого типа с частотой
вращения n. В цепь трехфазной обмотки якоря ОЯ включена трехфазная
нагрузка с параметрами фазы
ннн
z,x,r . В цепь обмотки возбуждения ОВ
включено регулировочное сопротивление
рег
r , при помощи которого регу-
лируется ток
в
i , и следовательно, ЭДС фазных обмоток
0
E . Фазные об-
мотки имеют параметры
c
x,r .
Магнитная индукция вдоль внутренней поверхности статора распреде-
лена по синусоидальному закону:
α
sinBB
m
=
. При равномерном враще-
нии ротора
t
ω
α
=
, а магнитная индукция
tsinBsinBB
mm
ω
α
=
=
. ЭДС
фазы статора будет также изменяться по синусоидальному закону:
).tsin(E
d
t
dФ
e
m
2
π
ω
−=−=
Частота f ЭДС определяется числом пар полюсов ротора р и скоростью
его вращения.
Рис. 6.13
При увеличении числа пар полюсов пропорционально увеличивается
частота:
.
pn
;
pn
f
60
2
60
π
ω
==
Действующее значение ЭДС фазы определяется формулой, аналогичной
для асинхронного двигателя и трансформатора:
,wФfk,E
00
444
=
вр
M,n
−
+
ОВ
рег
r
в
i
О
Я
c
x,r
0
E
U
U
I
ннн
z,x,r

23
где w – число витков обмотки фазы статора, k – обмоточный коэффициент.
Очевидно, что nФcE
e 00
= , если принять .
kpw,
c
e
60
444
= Так как частота
вращения ротора должна быть постоянной, то ЭДС фазы можно регулиро-
вать только изменением потока
0
Ф , воздействуя на ток возбуждения.
Токи трехфазной статорной обмотки создают свое магнитное поле,
которое вращается в ту же сторону, что и магнитное поле ротора.
Вращение магнитных полей синхронно, что и послужило основанием для
названия синхронных машин.
Взаимодействие магнитных полей ротора и статора создает электромаг-
нитный момент
вр
M , препятствующий вращению ротора.
Поскольку магнитные поля ротора и статора действуют в одной маг-
нитной цепи, то они влияют друг на друга. Влияние поля статора на поле
ротора называют реакцией якоря.
МДС обмотки возбуждения создает основной поток возбуждения
0
Ф ,
который индуктирует в каждой фазе обмотки якоря ЭДС
0
E . Под дейст-
вием тока якоря I на активном сопротивлении фазы возникает падение на-
пряжения Ir. При работе синхронной машины как в генераторном, так и в
двигательном режимах обмотка якоря создает поток рассеяния
р
Ф , с кото-
рым связано появление ЭДС самоиндукции
р
E . Ее можно заменить паде-
нием напряжения ,xIE
pp
= где
pp
Lx
ω
=
и
p
L – индуктивное сопротив-
ление и индуктивность, связанные с потоком рассеяния.
Явление реакции якоря можно учесть введением ЭДС
я
я
IxE = , где
я
я
Lx
ω
= , а
я
L – индуктивность, связанная с полем реакции якоря. ЭДС
р
E и
я
E могут быть представлены одной суммарной эквивалентной ЭДС
.Ix)xx(IEEE
cяpяpя
=
+=+=
1
Сопротивление
c
x называют синхрон-
ным сопротивлением. При переменной нагрузке генератора
c
x
считают по-
стоянным.
Анализ свойств синхронного генератора будем проводить в предполо-
жении, что его ротор имеет неявновыраженные полюсы и насыщение маг-
нитопровода отсутствует. Для упрощения анализа будем считать, что
ЭДС
1
я
E соответствует определенный вращающийся поток
1
я
Ф . Допустим
также, что активное сопротивление фазы r = 0 (см. рис. 6.13).
С учетом приведенных выше допущений якорной цепи схемы рис. 6.13
соответствует уравнение
.UIjxE
c
&&&
+=
0
(6.25)
При подстановке в (6.25) значения фазного напряжения на выводах ге-
нератора и нагрузки IjxIrZIU
ннн
&&&&
+== получим:

24
,I)xx(jrIE
нcн
&&&
++=
0
(6.26)
откуда:
.
)xx(jr
E
I
нcн
++
=
0
&
&
(6.27)
Угол фазового сдвига между током
I и напряжением U определяется вы-
ражением
н
н
r
x
arctg=
ϕ
, а угол фазового сдвига между током I и ЭДС
0
E
соответствует выражению
.
r
xx
arctg
н
нc
+
=
ψ
Электромагнитная мощность генератора
эм
Р и электромагнитная мощ-
ность
н
Р
, отдаваемая генератором в нагрузку, определяются выражениями:
;cosIEP
эм
ψ
0
3= (6.28)
.cosUIP
н
ϕ
3= (6.29)
Электромагнитная мощность генератора
эм
Р отличается от электро-
магнитной мощности в нагрузке
н
Р на величину потерь мощности в ак-
тивном сопротивлении обмотки якоря
.rIP
я
2
3=
∆
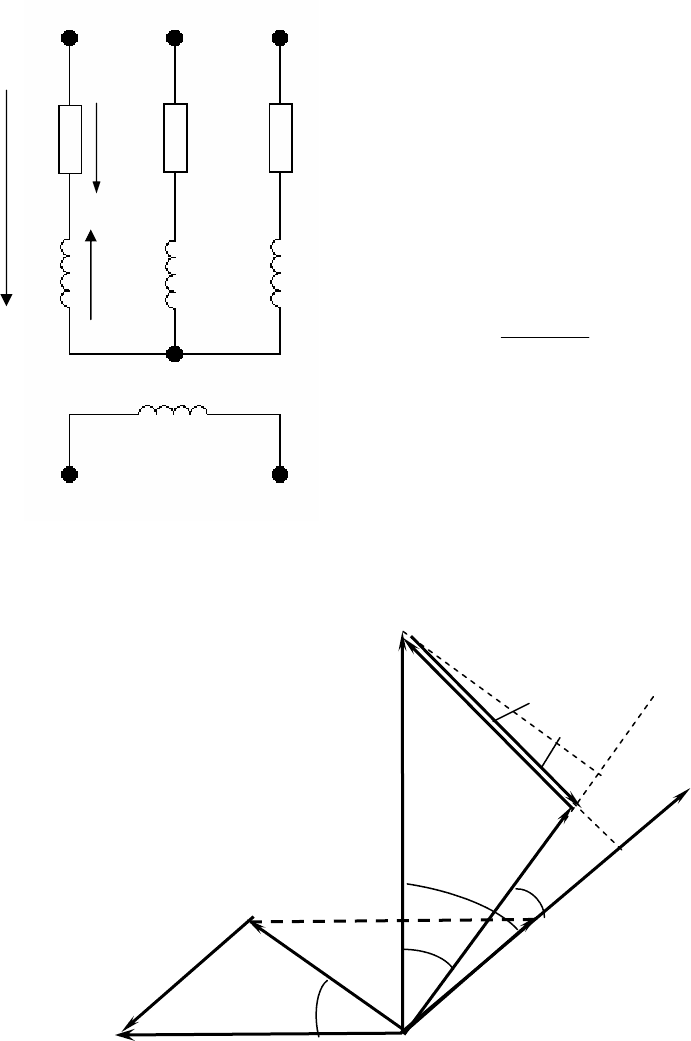
На рис. 6.14 показана векторная диаграмма синхронного генератора для
случая активно-индуктивной нагрузки.
Рис. 6.14
ψ
0
Ф
&
E
U
&&
=
I
&
0
E
&
Ijx
c
&
1
я
E
&
0
Θ
ϕ
Ф
&
1
я
Ф
&
Θ

25
Построение векторной диаграммы целесообразно начать с расположе-
ния вектора ЭДС
0
E
&
. Под углом
ψ
, отложенным в отрицательном направ-
лении к вектору
,E
0
&
располагается вектор тока .
I
&
Под углом
ϕ
, отло-
женным в положительном направлении от вектора тока
,I
&
располагается
вектор напряжения
.
U
&
Под прямым углом к вектору тока
I
&
из конца векто-
ра
0
E
&
откладывается вектор индуктивного падения напряжения .Ijx
c
&
По
отношению к вектору тока
I
&
вектор Ijx
c
&
будет опережающим. Сумма
векторов
U
&
и Ijx
c
&
должна быть равна вектору ЭДС
0
E
&
.
Так как постоянные по значению вращающиеся в пространстве магнит-
ные потоки могут быть представлены пульсирующими магнитными пото-
ками, изменяющимися во времени по синусоидальному закону, то на век-
торной диаграмме можно расположить вектор потока
0
Ф
&
, который опере-
жает
0
E
&
на угол 2/
π
, и совпадающий по фазе с током
I
&
вектор потока
1
я
Ф
&
. Результирующий поток
10
я
ФФФ
&&&
+= индуктирует эквивалентную
ЭДС
.EEUE
я
10
&&&&
+== Как видно на диаграмме, все ЭДС отстают от со-
ответствующих потоков на угол 2
/
π
.
ЭДС
0
E имеет фазовый сдвиг на угол
Θ
по отношению к напряжению
U. На такой же угол сдвинуты потоки
0
Ф и Ф.
На рис. 6.15 показана векторная диаграмма генератора для случая ак-
тивно-емкостной нагрузки.
Рис. 6.15
ψ
0
Ф
&
U
&
I
&
0
E
&
Ijx
c
&
0
Θ
ϕ
Ф
&
1
я
Ф
&
Θ
26
Векторные диаграммы наглядно демонстрируют влияние нагрузки на
изменение напряжения синхронного генератора.
6.2.3 Двигательный режим синхронных машин
На рис. 6.16 показана простейшая схема трехфазного синхронного дви-
гателя. К обмотке статора подведено трехфазное переменное напряжение,
к обмотке возбуждения – постоянное напряжение.
Пусть двигатель находится в рабочем
режиме, т.е. его ротор вращается с часто-
той
0
n магнитного поля статора. При
анализе его работы примем те же допу-
щения, что и для синхронного генерато-
ра. Для указанных на рис. 6.16 положи-
тельных направлений по второму прави-
лу Кирхгофа составим уравнение
,IjxEU
c
&&&
+=
0
(6.30)
откуда определим ток якоря
.
jx
EU
I
c
0
&&
&
−
=
(6.31)
Выражение (6.31) показывает, что ток
I при заданном напряжении определяется
как значением ЭДС
0
E , так и углом
сдвига фаз между
0
E и U.
На рис. 6.17 показана векторная диа-
грамма двигателя при определенных зна-
чениях механической нагрузки и тока возбуждения.
Рис. 6.17
r
r
r
c
x
c
x
c
x
ОВ
0
E
U
+
−
C
B
A
Рис. 6.16
I
ψ
0
Ф
&
E
U
&&
=
I
&
0
E
&
Ijx
c
&
1
я
E
&
0
Θ
ϕ
Ф
&
1
я
Ф
&
Θ
1
я
Ф
&
−
1
3
2
ψ

27
Диаграмма строится следующим образом. Откладываются в качестве
опорного вектор напряжения
U
&
и под углом φ к нему вектор тока
I
&
. По-
требляемая нагруженным двигателем мощность
н
P будет положительной
при
.
22
π
ϕ
π
<<−
Значение
ϕ
при конкретной нагрузке зависит от значе-
ния ЭДС
0
E .
Затем из конца вектора напряжения
U
&
под прямым углом к вектору тока
I
&
откладывается вектор напряжения ,Ijx
c
&
опережающий вектор тока. Раз-
ность векторов напряжения
U
&
и напряжения Ijx
c
&
равна вектору ЭДС
.E
0
&
Магнитные потоки двигателя
10
я
Ф,Ф
&&
и Ф
&
пропорциональны ЭДС
10
я
E,E
&&
и ,UE
&&
= но вектор результирующего магнитного потока Ф
&
в дви-
гательном режиме определяется уравнением
,ФФФ
я
10
&&&
−= что соответст-
вует выражению (6.30):
.EEIjxEEU
я
c 100
&&&&&&
−=+==
Синхронному двигателю соответствуют такие же уравнения для мощ-
ностей, как и для синхронного генератора, но смысл их будет иным. В дви-
гательном режиме работы синхронной машины
ϕ
cosUIP
н
3
=
представля-
ет собой потребляемую из сети мощность. Вычитанием из этой мощности
потерь мощности в обмотке якоря получается электромагнитная мощность,
преобразуемая в механическую:
.cosIErIcosUIРPP
я
нэм
ψϕ∆
0
2
333 ≈−=−= (6.32)
В (6.32) учтено, что
ψ
ϕ
cosEcosU
0
=
. Это очевидно из векторной
диаграммы (отрезок 01 на рис. 6.17).
Электромагнитный момент двигателя выражается через мощность и уг-
ловую частоту вращения
602 n
π
ω
= :
.
cosIE
PM
эм
ω
ψ
ω
0
3
== (6.33)
Если на векторной диаграмме из точки 2 провести перпендикуляр к ли-
нии 03, то из очевидных геометрических соотношений, с одной стороны,
длина отрезка 23 равна
,
s
inU
Θ
а с другой стороны –
ψ
cosIx
c
. Составив
равенство
,cosIxsinU
c
ψ
Θ
=
определяем .xsinUcosI
c
Θ
ψ
=
Подстановкой значения
ψ
cos
I
в (6.33) получим уравнение угловой ха-
рактеристики синхронного двигателя:

28
.sin
x
UE
M
c
Θ
ω
0
3
= (6.34)
Угловая характеристика показана на рис. 6.18. При постоянных значе-
ниях
c
x,,E,U
ω
0
электромагнитный момент синхронного двигателя про-
порционален
.
s
in
Θ
Рис. 6.18
Рабочая часть характеристики при условно положительном направле-
нии вращения двигателя расположена в первом квадранте. Часть характе-
ристики, расположенная в пределах
0
900...
=
Θ
, называется устойчивой.
Для устойчивой части характеристики характерно выполнение общего
принципа саморегулирования электрических машин: увеличение момента
нагрузки приводит к увеличению момента двигателя до такого же уровня.
Часть характеристики, расположенная в пределах
0
1800...
=
Θ
, называется
неустойчивой, так как увеличение момента нагрузки в этой области приво-
дит к остановке двигателя.
При номинальном моменте двигателя
ном
M
угол
Θ
находится в преде-
лах
0
3020...=
Θ
, а отношение 232 ,...M/М
номmax
=
. Это отношение ха-
рактеризует перегрузочную способность двигателя. Перегрузочная спо-
собность может быть увеличена за счет повышения ЭДС
.E
0
ном
Θ
Θ
max
M
ном
M
M
0
0
90−
0
90
0
180−
0
180

29
Механическая характеристика
)
M
(
f
n
=
для синхронного двигателя
представляет собой горизонтальную прямую линию, ограниченную преде-
лами
.M
max
±
6.3 МАШИНЫ ПОСТОЯННОГО ТОКА
6.3.1 Назначение и устройство машин постоянного тока
Машины постоянного тока предназначены для использования в качест-
ве генераторов и двигателей. Машины постоянного тока обратимы, т.е. мо-
гут работать как в генераторном, так и в двигательном режимах. Основное
внимание уделим двигателям постоянного тока.
К положительным свойствам двигателей постоянного тока относятся:
9 возможность получения теоретически любых частот вращения;
9 устойчивость работы на любых частотах вращения;
9 линейность механических характеристик;
9 значительный пусковой момент;
9 отсутствие самохода;
9 возможность плавного регулирования частоты вращения в широком
диапазоне.
Внешний вид одной из конструкций и схематическое устройство двига-
теля постоянного тока показаны на рис. 6.19,
а, б.
12 11 10 9
а) б)
Рис. 6.19
Двигатель состоит (рис. 6.19, а) из переднего подшипникового щита 1,
на котором размещены щетки 2 и в отверстие которого входит подшипник
12. Статор 5 двигателя содержит обмотки возбуждения 3 полюсов и поме-
щен в корпус 4. Корпус двигателя в сборе закрывается подшипниковыми
щитами 1 и 6. На вал 7 напрессованы сердечник якоря 8, коллектор 11 и

30
подшипники. Обмотка 10 расположена в пазах сердечника якоря, и ее от-
пайки электрически соединены с пластинами коллектора.
Наличие скользящих контактов (коллектора и щеток) как наименее на-
дежного узла конструкции ограничивает области применения машин по-
стоянного тока.
ПАЧИНОТТИ Антонио (17.VI 1841-24.III 1912) – итальян-
ский физик и изобретатель, член Академии деи Линчеи (1898).
Родился в Пизе. Окончил Пизанский университет (1861). В
1861-1864 преподавал во Флоренции, в 1864-1872 – профессор
Королевского технологического института в Болонье, в 1873-
1881 – университета в Кальяри, с 1882 – Пизанского университе-
та.
Основные работы в области электромагнетизма и электротех-
ники. В 1859 построил электродвигатель с кольцевым зубчатым
якорем, в 1860 – двигатель постоянного тока с коллектором, ука-
зав на возможность его преобразования в динамомашину посто-
янного тока, изобретателем которой его и считают. Построил ряд
магнитоэлектрических машин, сделал ряд усовершенствований.
Генераторы и двигатели постоянного тока устроены одинаково. Схема-
тическое изображение двухполюсной машины постоянного тока в разрезе,
необходимое для рассмотрения принципа ее работы, показано на рис. 6.19,
б. Магнитная цепь машины состоит из корпуса статора, сердечников по-
люсов и сердечника якоря. Как и у любой электрической машины, между
якорем и статором имеется воздушный зазор, через который замыкается
рабочий магнитный поток. Основной магнитный поток создается обмоткой
возбуждения, которая расположена на сердечниках полюсов.
Обмотка возбуждения машины может подключаться к независимому
источнику постоянного тока. В этом случае машина называется машиной
независимого возбуждения (рис. 6.20,
а).
При подключении обмотки возбуждения параллельно цепи якоря (к
щеткам коллекторно-щеточного узла) машина называется машиной парал-
лельного возбуждения (рис. 6.20,
б).
Если обмотка возбуждения включена последовательно в якорную цепь,
то в таком случае машина называется машиной последовательного возбу-
ждения (рис. 6.20,
в). Такие машины предназначены для работы только в
двигательном режиме и имеют обмотку возбуждения из провода большого
сечения, рассчитанного на прохождение тока якоря.
Машины смешанного возбуждения имеют две обмотки – параллельную
и последовательную (рис. 6.20,
г).
Линия, проходящая перпендикулярно оси полюсов, называется геомет-
рической нейтралью. Для проводников обмотки вращающегося якоря, на-
ходящихся на геометрической нейтрали, нормальная составляющая маг-
нитной индукции равна нулю, и ЭДС в них не индуктируется.