Xin Q. Diesel Engine System Design
Подождите немного. Документ загружается.

36 Diesel engine system design
© Woodhead Publishing Limited, 2011
the design specications wide enough in tolerance (i.e., not over-constrained)
so that the manufacturing process variation has little or no impact on the
system/product performance.
The causes of failure modes may come from system design, component
design, material selection, prototype build, etc. The failure modes can be
classied into two categories: noise related and non-noise related. Each
category is handled by a specic robust engineering tool. The functional block
diagram and interface matrix for system FMEA development can be used
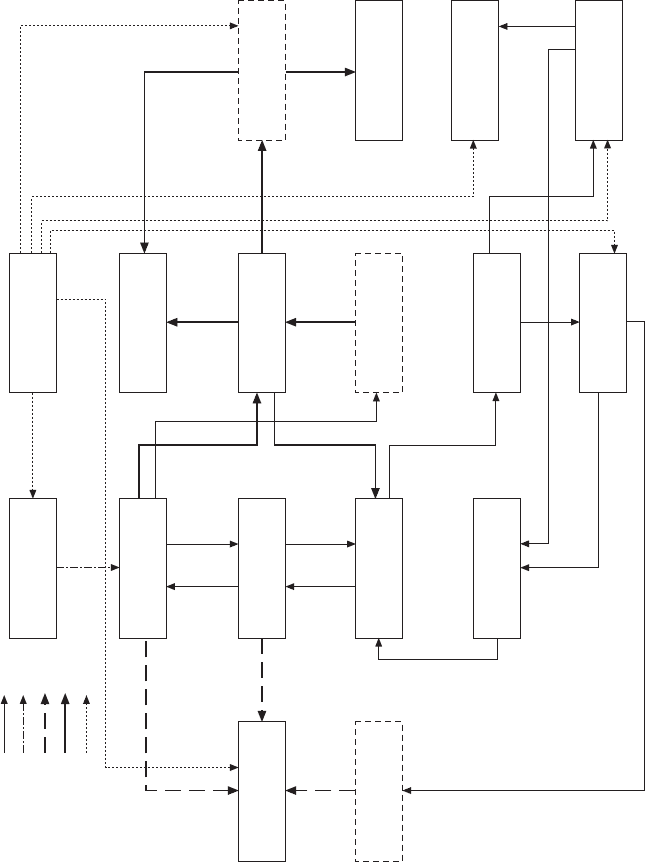
to identify the non-noise-related failure modes. The purpose of a functional
block diagram (Fig. 1.10) is to identify all the inputs and outputs of the
functional blocks as well as their interfaces in the forms of physical or force
connection, energy transfer, material exchange, and information or signal
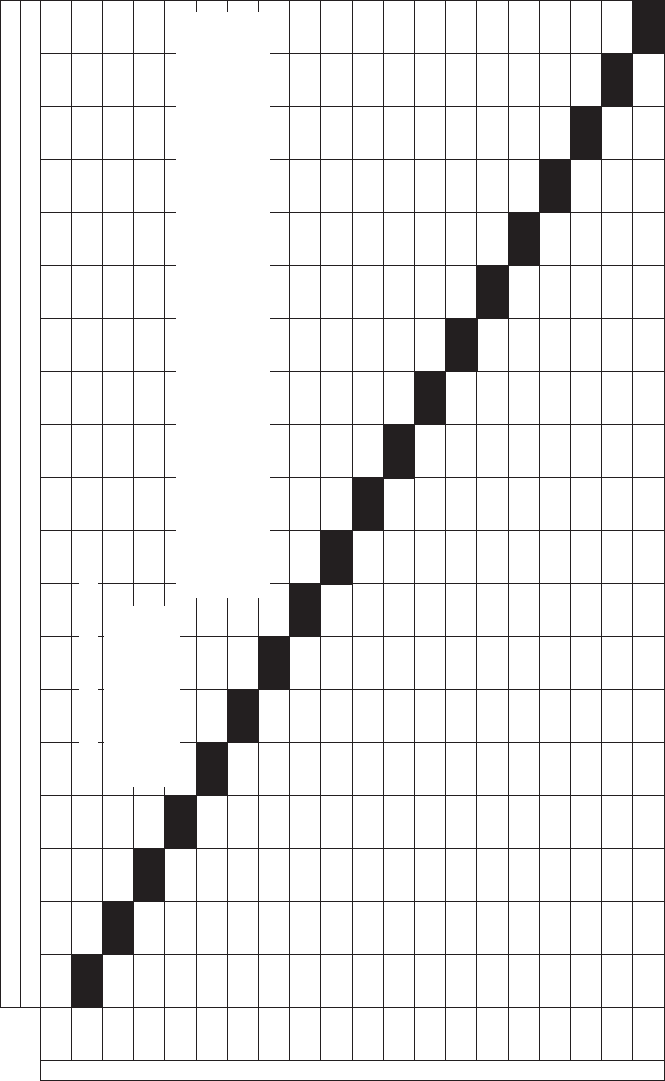
exchange. The system interface matrix (Fig. 1.11) quanties the interfaces
in terms of strength and importance and their potential effects. It is a useful
tool for managing interfaces and the potential causes of failure resulting from
subsystem interactions in diesel engine system design. Interactions present
if the behavior of one subsystem depends on that of another subsystem.
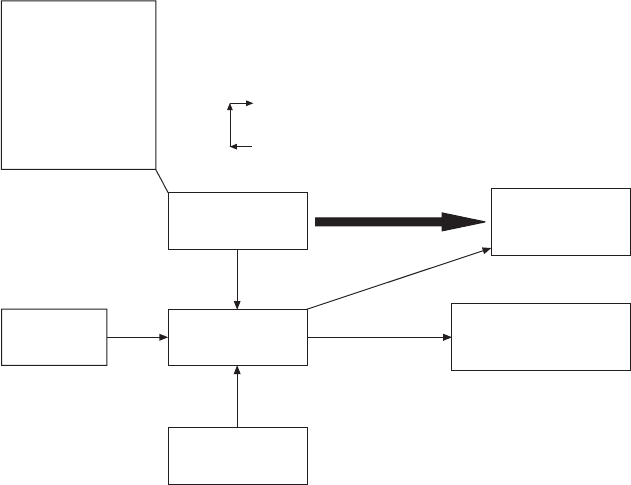
The parameter diagram (i.e., P-Diagram, Fig. 1.12) is used to identify
the noise-related failure modes. The P-Diagram identies intended inputs
and outputs, noise factors, control factors, and error states. Noise factors are
unintended interfaces or sources of disturbing inuences that may cause a
deviation, disruption, or failure of the function during the mission time of
the component or the engine. They are the causes of failure modes. Noise
factors are uncontrollable (i.e., impossible, impractical or expensive to control)
in product design or in-use operation. Generally, noise factors include the
following ve sources:
∑ Piece-to-piece or unit-to-unit variation (e.g., manufacturing variability
in component geometry or material properties, variations in product-
controlled parameters such as engine compression ratio, valve timing,
turbocharger variance, fuel injection timing, injector variance or drift,
tolerances in the controllable variables).
∑ Internal environment noise (also called system interaction noise or
proximity noise, i.e., the unwanted effect of one subsystem on another, or
subsystem interactions due to the variation of the input from neighboring
subsystems or from the in-vehicle system operating environment, for
example, variability in sensor signals, variance and drift of the air ow
sensor, variability in the exhaust gas temperature or engine-out emissions
composition).
∑ External environment noise (e.g., ambient temperature, humidity, altitude,
road surface condition).
∑ Customer usage (e.g., accidental or foreseeable misuse and abuse of the
product, real world usage duty cycle or load, different types of fuel or
Diesel-Xin-01.indd 36 5/5/11 11:41:24 AM
© Woodhead Publishing Limited, 2011
Gas flow
Fuel flow
Coolant flow
Power
Control signal
Fuel system
Engine controls
and calibration
Power cylinder &
piston assembly
Waste heat
recovery system
Accessories
Crankshaft
Hybrid powertrain
Cylinder head
Valvetrain
Intake manifold
Exhaust manifold
Aftertreatment
Turbocharger
EGR system
Engine brake Vehicle drivetrain
Cooling system
(Optional)
(Optional)
(Optional)
1.10 Robustness tool
– functional block
diagram of diesel
engine system.
Diesel-Xin-01.indd 37 5/5/11 11:41:25 AM
© Woodhead Publishing Limited, 2011
Diesel engine system
Effects (to)
Vehicle
drive-
train
Hybrid
power-
train
Hybrid
power-
train
Power
cylinder
& piston
Power
cylinder
& piston
Waste
heat
recovery
Waste
heat
recovery
Cylinder
head
Cylinder
head
Valve-
train
Valve-
train
Connect-
ing rod
Connect-
ing rod
Crank-
shaft
Crank-
shaft
Turbo-
charger
Turbo-
charger
EGR
system
EGR
system
Fuel
system
Fuel
system
Cooling
system
Cooling
system
Engine
brake
Engine
brake
Acce-
ssories
Acce-
ssories
Engine
controls
Engine
controls
After-
treat-
ment
After-
treat-
ment
Engine
cali-
bration
Engine
cali-
bration
Intake
manifold
Intake
manifold
Exhaust
manifold
Exhaust
manifold
Vehicle
drive-
train
Causes (from)
System FMEA interface matrix
P: Physical connection
E: Energy transfer
M: Material exchange
I: Information exchange
2 = Necessary for function (i.e., required)
1 = Beneficial but not absolutely necessary for functionality (i.e., desired)
0 = Does not affect functionality (i.e., indifferent)
–1 = Causes negative effects but does not prevent functionality (i.e., undesired)
–2 = Must be prevented to achieve functionality (i.e., detrimental)
1.11 Robustness tool – interface matrix and subsystem interaction of diesel engine system.
Diesel-Xin-01.indd 38 5/5/11 11:41:25 AM
39The analytical design process and diesel engine system design
© Woodhead Publishing Limited, 2011
1. Piece-to-piece
variation (e.g.,
tolerance)
2. Internal noise
due to neighboring
subsystems
3. external
environmental noise
(e.g., climate, road)
4. Customer usage
profile and duty cycle
5. Changes over time
Iterate
Noise factors
(uncontrollable
due to variations)
Robust design process:
• Analyze the sources of noise and magnitudes
• Analyze the effects of noise factors or their
combinations on error states (strong/weak/no
interaction)
• Assess the robustness of the design
• Generate noise factor management strategy
• Parameter design, tolerance design, design for
variability
• Reliability conrmation test
Robust design (a link)
Error states
(failure modes
entered in FMEA)
Input
Control factors
Engine system or
subsystem
Output response or
quality characteristic
(ideal or intended
function)
1.12 Robustness tool – parameter diagram (P-Diagram) and robust
design process.
lubricant or coolant used in an engine, accumulation of soot in the DPF
and the associated increase in the back pressure).
∑ Changes over time or vehicle mileage (i.e., time-dependent deterioration
or aging, e.g., component wear, corrosion, fatigue, component strength
reduction, catalyst’s physical or chemical degradation in conversion
efciency, build-up of impurities in recycled materials such as soot in
engine oil, accumulation of ash in the DPF and the associated increase
in the back pressure, EGR cooler fouling).
In system design or reliability verication, several noise factors may be
combined to form a worse or the worst case noise level so that the number
of tests can be reduced. When noise sources exist the pieces or units that
marginally meet the minimum acceptable functional performance will suffer
from a loss of function that may cause a failure. For example, a borderline
component with maximum fuel injection quantity may fail at an extreme
ambient condition. It should be noted that for a multi-cylinder engine, the
cylinder-to-cylinder variation (for example, variations in EGR distribution,
peak cylinder pressure, temperature, heat ux, exhaust runner pressure and
temperature) is not a noise factor. The cylinder-to-cylinder variation is a
controlled variable which can be improved by design. Usually, the cylinder’s
Diesel-Xin-01.indd 39 5/5/11 11:41:25 AM
40 Diesel engine system design
© Woodhead Publishing Limited, 2011
worst parameter should be selected as the characteristic parameter to represent
the whole engine in probabilistic design. Moreover, the malfunction or
catastrophic failure of a component or system is usually a noise factor. For
example, when the EGR valve malfunctions to fully close at rated power,
all the exhaust gas ows to the turbine and the compressor may over-speed.
Although the turbocharger matching in engine system design should be
targeted for normal operation rather than such a malfunctioning failure mode,
the effect of such a failure mode needs to be checked as part of a reliable
and robust design.
The control factors are the measures that can be changed in design to
affect the mean response of the component or system to reduce variability.
The response refers to the output of the component or system in the form
of force, energy, material, signal, etc. For example, the set point of VGT
vane opening is a control factor, but the tolerance of the VGT opening due
to turbine actuator errors is a noise factor. Changing control factors can
make the system function more robust (i.e., less sensitive to the inuence of
noises). The error states identify the failure modes. The error states reect
the deviation of the intended function, and they are potential failure modes.
There are seven types of failure modes, namely omission of action, excessive
action, incomplete action, erratic action, uneven action, action too slow,
and action too fast. For example, the error states for a diesel aftertreatment
system may include excessive tailpipe emissions, excessive back pressure,
increased BSFC, decreased time between DPF regeneration cycles, etc.
At the end, a robustness checklist can be developed to manage the noise
factors and failure modes. Each failure event is assessed by the frequency of
occurrence of the cause (O), the severity of the effect (S) and the ability of
detection (D, Fig. 1.9). To quantify the risks, each failure mode may have
a risk priority number, calculated as the product of occurrence, severity,
and detection. Design changes are usually required in order to reduce the
occurrence and the severity and consequently the risk.
1.3.3 The concept of performance
Performance is the most important attribute for diesel engine systems. It
represents the functionality of the engine. As shown in Fig. 1.8, performance
is a major composition of the product quality. Engine performance includes
the following six categories of characteristics:
1. displacement, velocity and acceleration (e.g., engine transient response
of speed, vehicle acceleration, drivability)
2. force and torque (e.g., engine ring torque, vibration)
3. energy and energy rate (e.g., engine power, coolant heat rejection, exhaust
gas exergy)
Diesel-Xin-01.indd 40 5/5/11 11:41:25 AM
41The analytical design process and diesel engine system design
© Woodhead Publishing Limited, 2011
4. uid ow (e.g., the pressure, temperature and ow rate of ambient air
ow, engine gas ows, fuel ow and coolant ow, as well as the ow
rate and concentration of emissions species)
5. noise (e.g., combustion noise, exhaust noise, piston slap noise)
6. electronic control signals.
It should be noted that the derived parameters by using the above parameters
usually also belong to the performance attribute, for example, fuel economy,
or BSFC (dened as the ratio of fuel ow rate to engine power). Both quality
and reliability of the engine are measured by performance, durability, and
packaging. For example, if the engine has a problem of power loss in service,
it is a reliability problem in performance, rather than a quality problem due
to durability.
Specic engine performance parameters can usually be found from engine
program functional objectives, for example:
∑ ambient operating conditions (e.g., altitude range, temperature range,
humidity range)
∑ engine speed range (e.g., maximum rated speed, maximum governed
speed, high idle speed, maximum over-speed)
∑ engine power and torque output and speed (usually dened by full-load
torque curve)
∑ engine friction and parasitic power losses (e.g., motoring friction power,
power consumption of FEAD accessories)
∑ transient driving cycle emissions (e.g., HC, CO, NO
x
or NMHC + NO
x
,
NMHC, particulate matter, formaldehyde, smoke during acceleration or
at full load)
∑ white smoke level
∑ exhaust odor
∑ fuel economy (e.g., BSFC at rated power, peak torque and typical part-
load modes)
∑ NVH (e.g., full-load noise, no-load noise, engine idle noise, turbocharger
noise, 1/3 octave band center frequencies, maximum displacement of
the powerplant mount, engine balance, resonances)
∑ engine startability (e.g., crank-to-start time at different cold ambient
temperatures, hot restart time, glow plug’s wait-to-start time, the
minimum cranking speed for unaided cold start, cold cranking torque
requirement)
∑ engine idle quality (e.g., hot curb idle speed and its maximum variation,
misre)
∑ fuel system (e.g., sulfur level, specications of the diesel fuel or the
alternative fuel, maximum fuel ow delivery capacity, fuel pressure,
maximum fuel pump resistance, maximum return fuel temperature)
∑ air induction system (e.g., intake restriction, maximum air ow rate,
Diesel-Xin-01.indd 41 5/5/11 11:41:25 AM
42 Diesel engine system design
© Woodhead Publishing Limited, 2011
maximum rise-over-ambient temperature at the compressor inlet, maximum
compressor outlet air temperature, charge air cooler restriction)
∑ exhaust system (e.g., maximum exhaust manifold gas temperature,
maximum EGR flow rate, maximum exhaust flow rate, exhaust
restriction)
∑ aftertreatment system (e.g., engine torque variations during DPF
regeneration and LNT lean-rich modulations)
∑ cooling system (e.g., coolant type, heat rejections, water pump ow,
maximum engine inlet and outlet coolant temperatures, maximum engine
oil temperature, thermostat control set points)
∑ cab heater (e.g., heater core ow).
In the functional objectives the following are also stipulated but they are
not performance attributes:
∑ engine durability life (e.g., B10 life in terms of the number of miles
traveled)
∑ maintenance intervals (e.g., oil and lter change intervals, DPF service
interval, valve lash adjustment; these are durability attributes)
∑ engine and aftertreatment weight (these are packaging attributes)
∑ engine architecture (e.g., displacement, cylinder conguration, bore,
stroke, bore spacing, ring order, rotation direction, compression ratio,
mean piston speed, package size in terms of length, width and height,
congurations of valvetrain, combustion system and turbocharging).
It is observed from the above that the engine functional requirements consist
primarily of performance parameters. Therefore, the core of this book is
focused on engine performance in system design.
1.3.4 The concept of durability
The denition of durability
Engine durability or endurance is the other major attribute that affects the
quality and reliability of the engine. It is usually confused with reliability
in the literature. According to the denition given in the APQP (advanced
product quality planning) manual developed jointly by Chrysler Corporation,
Ford Motor Company and General Motors Corporation, durability is ‘the
probability that an item will continue to function at customer expectation
levels, at the useful life without requiring overhaul or rebuild due to wear-out’.
The APQP manual also dened reliability as ‘the probability that an item
will continue to function at customer expectation levels at a measurement
point, under specied environmental and duty cycle conditions’. Another
denition was given by O’Connor (2002), ‘durability is a particular aspect
of reliability, related to the ability of an item to withstand the effects of time
Diesel-Xin-01.indd 42 5/5/11 11:41:25 AM
43The analytical design process and diesel engine system design
© Woodhead Publishing Limited, 2011
(or of distance travelled, operating cycles, etc.) dependent mechanisms such
as fatigue, wear, corrosion, electrical parameter change, etc. Durability is
usually expressed as a minimum time before the occurrence of wear-out’.
The above denitions of durability are somewhat ambiguous. Engine
durability is better dened as the probability related to the hardware
structural ability of an item to withstand the effects of time-dependent or
non-time-dependent thermal, mechanical or chemical mechanisms such as
fracture, fatigue, wear, corrosion, creep, deformation, fouling, plugging,
electrical parameter change, etc. The time-dependent in the above refers to
the accumulated service time. The non-time-dependent refers to the situations
that are irrelevant to the accumulated time such as an abrupt rupture caused
by over-load.
Durability is a part of quality before the engine product is released to
the customer. It evolves to a part of reliability after the product is in use. In
other words, a structural failure occurring in the engine test cell is called a
durability problem rather than a reliability problem; and after the engine is
released in service, a structural failure is called a reliability problem associated
with a durability attribute. Such a denition clearly distinguishes between
durability (as a design attribute) and reliability. The latter is a characteristic
of the ‘overall quality’ extended into the time-in-service domain.
It should be noted that the concept of reliability covers the failures from
all three attributes: performance, durability, and packaging. Therefore, it is
not appropriate to assume equivalency between durability and reliability.
Durability is usually expressed as a minimum time or vehicle mileage before
the occurrence of any major type of structural failures (e.g., wear-out). For
example, a B10 durability life is the expected life (e.g., 20,000 hours or one
million miles) at which 10% of the population fails. A B50 durability life
is the expected life at which 50% of the population fails.
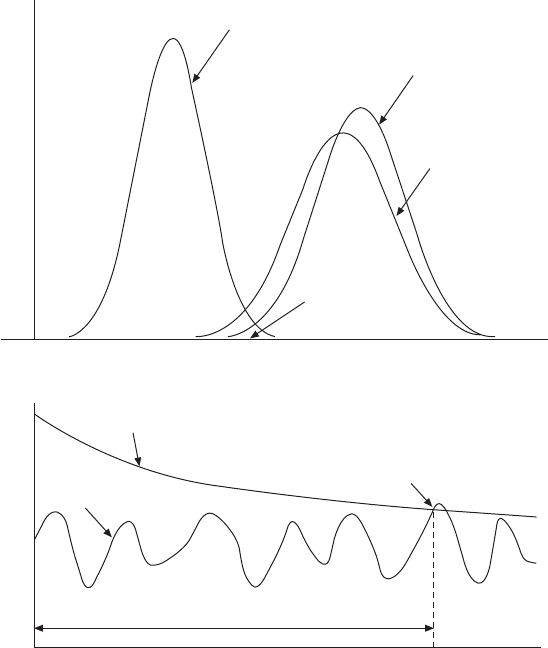
Stress–strength interference model
The concept of structural durability is illustrated in the stress–strength
interference model shown in Fig. 1.13. The gure shows a random probability
distribution diagram of component strength and stress. The stress represents
the load, and the strength represents the component’s structural capability
to resist the load. The stress and strength are random parameters and have
probabilistic distributions corresponding to the variability in noise input
factors. For example, the peak cylinder pressure load acting on the cylinder
head can be regarded as a type of ‘stress’. It has a probabilistic distribution
due to the manufacturing tolerance in engine compression ratio, the variation
in intake manifold boost pressure caused by the tolerance of turbocharger
wastegate controls, the variation of exhaust restriction due to the change
in DPF soot loading, the variation in ambient temperature, etc. The noise
Diesel-Xin-01.indd 43 5/5/11 11:41:25 AM
44 Diesel engine system design
© Woodhead Publishing Limited, 2011
factors affecting the structural strength of the cylinder head may include
the manufacturing tolerances in cylinder head deck waviness, atness and
surface nish, the material properties of the head and gasket, and so on. A
failure occurs when the stress is higher than the strength. The overlapping
area between the stress and strength distribution curves in Fig. 1.13 indicates
the probability of failure. The stress–strength model is elaborated in Chapter
2 for in-depth discussions on durability and reliability.
The role of durability in engine system design
Durability and performance are inter-related. Durability limits are used
as design constraints in engine system design in order to determine the
maximum achievable performance or appropriate hardware sizing. Figure
Stress distribution
Stress and strength
Strength, S(t)
Stress or load, s(t)
Time (t)
Failure occurs
Reliability in time-in-service domain
Strength distribution
Strength after aging
The overlap
area indicates
failure rate
Probability distribution at specific time t
Time to failure
t = 0
1.13 Stress–strength interference model in durability and reliability.
Diesel-Xin-01.indd 44 5/5/11 11:41:26 AM
45The analytical design process and diesel engine system design
© Woodhead Publishing Limited, 2011
1.13 shows that in order to control the failure rate, either the strength needs
to be increased (i.e., move the strength probability curve to the right or
reduce its distribution range) or the stress has to be reduced. In the example
of peak cylinder pressure, in order to reduce the pressure for better durability,
the control factors such as engine compression ratio, intake manifold boost
pressure or fuel injection timing need to be modied, and this affects engine
performance and emissions. The durability analysis on the stress and strength
distributions helps determine the maximum design limit and the nominal
design/calibration target of design parameters (e.g., peak cylinder pressure
and exhaust manifold gas temperature) that can be used for a durable system
design. These limits or nominal targets can ensure the engine will not be
overloaded and the structural strength is designed sufciently strong.
1.3.5 The concepts of quality, robustness, and quality
loss function
Quality is probably the most commonly known but ambiguous term in
engineering system design. In order to dene the role of quality in diesel
engine system design, we need to review several important concepts in quality
engineering. The engineering method of quality improvement is referred to
as ‘quality engineering’ in Japan (due to the pioneering work by Dr Genichi
Taguchi) and as ‘robust design’ in the West.
Quality has usually been dened as the degree to which performance
meets expectations. The American Society for Quality (ASQ) provides a
denition of quality as: ‘Quality denotes an excellence in goods and services,
especially to the degree they conform to requirements and satisfy customers.’
ISO8402 standard denes quality as ‘the totality of features and characteristics
of a product or service that bear on its ability to satisfy stated or implied
needs’. Quality has been also sometimes loosely dened as conformance to
specications. Note that time dependency is not included in these denitions.
For example, a non-time-dependent inspector’s view of quality may be that
a product is assessed against a specication. The product either passes the
inspection or fails. When the product passes, it is delivered to the customer.
The customer knows that it might fail at some future time and accepts such
a ‘reliability’ risk over time. This approach provides no measure of quality
over a period of time.
Time-based concept of quality was discussed by O’Connor (2002). Also,
as pointed out by Rausand and Hoyland (2004), ‘the quality of a product
is characterized not only by its conformity to specications at the time
supplied to the user, but also by its ability to meet these specications over
its entire lifetime.’ However, to avoid a controversy between the concepts
of reliability and quality, Rausand and Hoyland (2004) again advocated that
‘according to common usage, quality denotes the conformity of the product
Diesel-Xin-01.indd 45 5/5/11 11:41:26 AM