Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

:\i\O
15
. Some Applications
of
Controlled Electrical Drives
rrcquency-
and
time- based sensing
may
be carried
out
in
paralIel, selecting
w ilichever
result
offers a
better
resolution.
The
resolution
ofthe
speed sensing
can
also
be
improved
without
analogue
i Ill.erpolation by forming in each interval
the
integer difference of
the
incre-
Illcut.al counts
and
simultaneously measuring
with
a high frequency reference
til('
differential
time
between
the
first
and
last increments [K10].
ln
the
past,
when digital signal processing
equipment
was bulky
and
ex-
jl('llsive,
it
was only used when
it
was absolutely necessary
to
achieve
the
J'1
~
qllired
accuracy, i.e. in
the
outer
position
controlloop
of a servo drive,
but
wit.h
todays
microelectronic
hardware
this is changing rapidly. AlI
the
control
rlluctions in Fig. 15.9, including
the
control
of
an
induction
motor
and
the
!('rcrence model,
can
now be
incorporated
as a
modular
algorithm
in a micro-
cOlllputer which finds room on a
postcard
size
printed
cardo
If
necessary,
the
s;
ullpling
time
in
the
order of 1 ms
can
be reduced
by
a factor of
ten
when
(,Illploying signal processors processors; hence DC servo
motors
are
rapidly
sllpplanted by digitally controlled
and
compact AC drives.
This
is a
remark-
;d)!c development
made
possible
by
the
joint
advances of microelectronics
and
jlowcr electronics.
It
was mentioned before
that
backlash in gears
and
couplings
may
cause
jlroblems with position controlled drives because
the
contact
between two
;t.djoining
parts
of
the
drive is
temporarily
lost when
the
transmitted
force
is rcversed; as a consequence
the
surfaces formerly exerting opposite forces
;\II~
llloving
apart,
until
contact
is again
made
at
the
other
side of
the
gear
l.ooLIt.
Clearly
this
discontinuity
of
the
transmitted
force, possibly combined
wi
I.h
Coulomb friction, is in conflict with a
smooth
and
precise position con-
I.ml
[1365].
Backlash
can
be
avoided by employing high quality mechanical
("()I
II
jlOllents,
but
wear
cannot
be
excluded. A mechanical solution would
be
1111'
IIse of spring-Ioaded gears with split wheels which
maintain
a
bilateral
(·olll.ad force irrespective of
the
sign of
the
transmitted
load force.
AIlother solution requiring only
standard
gears is
to
split
the
drive into
:
;
('V(~ral
Illlits
and
to
preload
the
gears electrically;
this
is
of
particular
interest
ii'
til('
type of load makes a
distribution
of
the
driving force desirable anyway.
Ali
(~xample
could be
the
azimuth
motion
of a large satellite
antenna,
i.e.
the
j'()l.al.ioll
around
the
vertical axis;
antennae
of
this
type
require very
accurate
jlosil.iouing, for example with a final tolerance of less
than
1/100°.
This
rorn:spollds
to
a resolution
of
the
fulI circle
to
one
part
in 36,000 which
ddillitely
calls for direct
measurement
by a digital sensor
mounted
at
the
pivoL
!>caring
of
the
main
construction.
The
two or
more
servo motors could
I
II
:
arranged
at
symmetrical
points
arollnd
the
circumference
and
exert torqlle
I.hmlll·;1t
pillioll drives to
the
central gear. A simplified schematic is drawlI ill
I"i/':. I r
i.
1:\
ass1lmiu!; two motors,
with
the
main
struetur
e of
thc
étutellUi1
(tlld
1.11('
I.wo
drivI~
lIIoLors
I>eillg
IUlI1ped
illto
thr<'(~
sqmrate
rigid
I>o<lie:;
. TIl(:
1'l1.rld;ll
:h
1I:
,:
';
IIIII('d
ill
j.
)()l.ill~('nr
I.raills is lIIadc illdr('I,t,iv(:
by
<I,ddi1lg
opposit,,!
"il
H
ei,
l
ii
l
l',II
'
''
':
Lo
1.11(1
I,(lrqll('
n:fI:I'(:)l(
'Ps; I,!tis
1'('::1111.1'1
ill
jll'('loadiul':
1.11("/('
111
'11
iII
15.2 Linear Position
Control
381
the
low
torque
region, where backlash would
be
most
troublesome. As
the
required load
torque
mM
Ref
increases,
the
motor
that
initially opposes
the
motion, eventually reverses its
torque
and
comes
to
the
help
of
the
other
motor
until
there
is nearly equal load
sharing
at
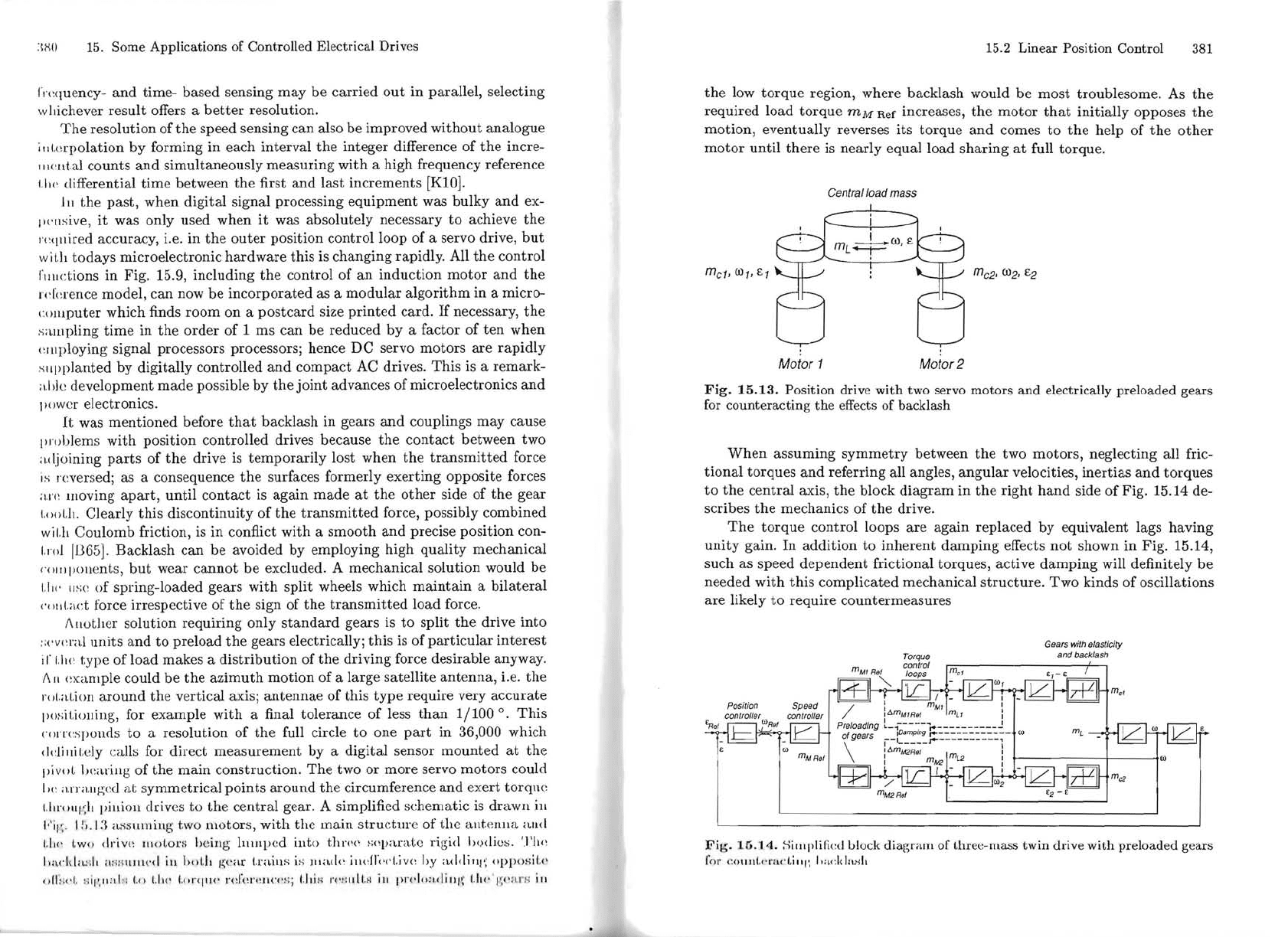
full torque.
Centralload mass
m
c
t,
ro
l,fl
~
m
C
2'
ro2'
f2
Motor 1
Motor 2
Fig.
15.13.
Position drive
with
two servo
motors
and
electrically
preloaded
gears
for
counteracting
the
effects
of
backlash
When
assuming
symmetry
between
the
two motors, neglecting ali fric-
tional
torques
and
referring all angles,
angular
velocities,
inertias
and
torques
to
the
central
axis,
the
block
diagram
in
the
right
hand
side of Fig. 15.14 de-
scribes
the
mechanics of
the
drive.
The
torque
control loops
are
again replaced by equivalent lags having
unity
gain.
ln
addition
to
inherent
damping
effects
not
shown in Fig. 15.14,
such as speed
dependent
frictional torques, active
damping
will definitely
be
needed
with
this
complicated mechanical
structure.
Two
kinds
of
oscillations
are
likely
to
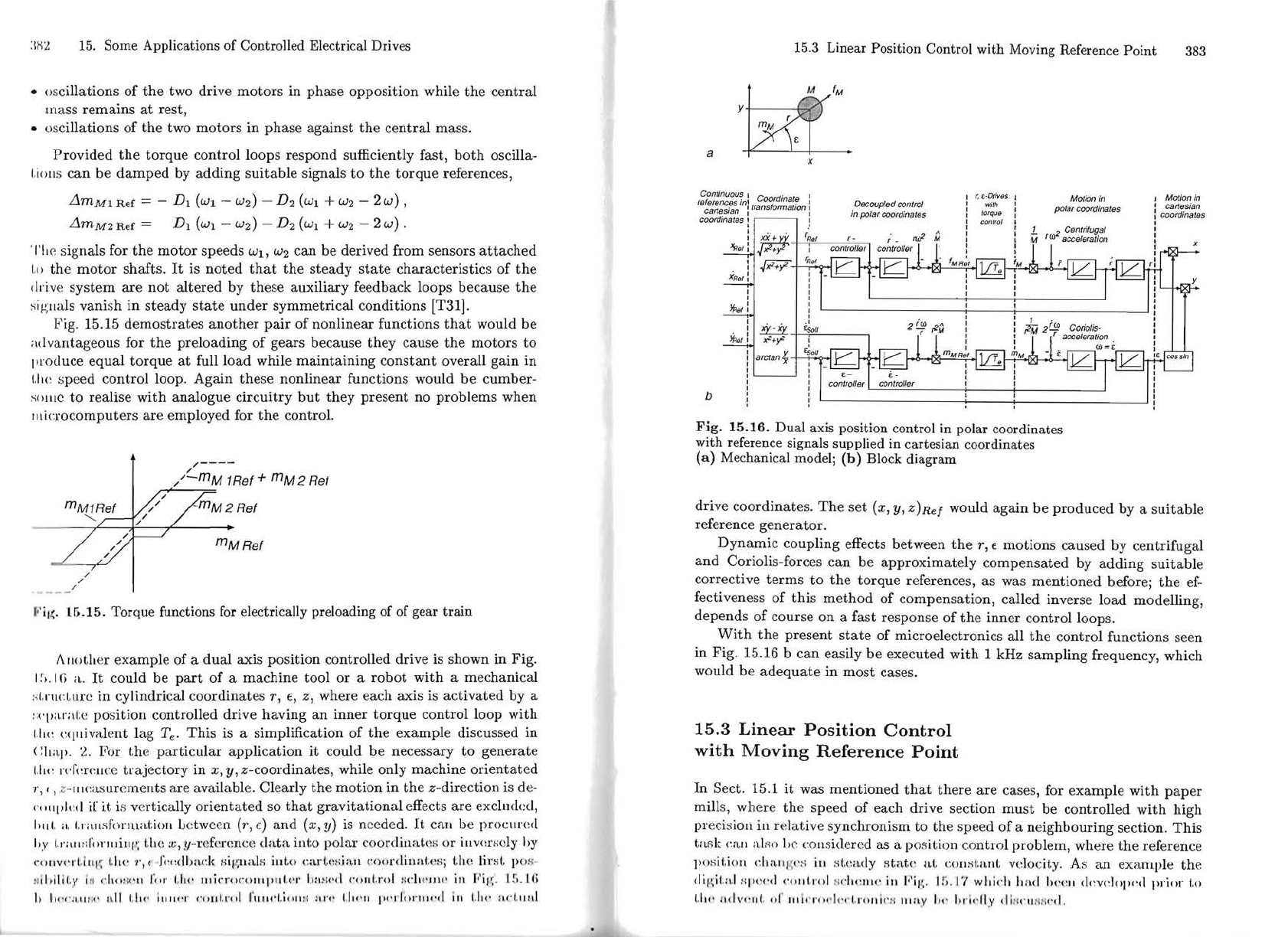
require countermeasures
Gears wi/h elasticity
and
backlash
Fig.
Hí.'14.
Silllplificd block diagram of three-mass
twin
drive
with
preloaded gears
for
CO\lllt(·l'Ilc'l.ill/',
hacldlLHh
:\
X:2
15. Some Applications
of
ControJled Electrical Drives
• oscillations of
the
two drive motors in phase opposition while
the
central
mass
remains
at
rest,
• oscillations of
the
two
motors
in phase against
the
central
mass.
Provided
the
torque
control loops respond sufficiently fast,
both
oscilla-
I.ioll
s
can
be
damped
by adding suitable signals
to
the
torque
references,
LlmMl
Ref
= -
DI
(Wl
-
W2)
- D
2
(Wl
+
W2
-
2w)
,
LlmM2ReC=
D
I
(WI-W2)-D
2
(Wl+W2-
2w
).
T!te signals for
the
motor
speeds
w},
W2
can be derived from sensors
attached
1."
the
motor
shafts.
It
is
noted
that
the
steady
state
characteristics of
the
dri
ve
system
are
not
altered by these auxiliary feedback loops because
the
~il-!;Ilals
vanish
in
steady
state
under
symmetrical conditions [T31].
Fig. 15.15 demostrates
another
pair
of nonlinear functions
that
would be
a
ti
va
ntageous for
the
preloading of gears because they cause the
motors
to
produce equal torque
at
fullload
while maintaining
constant
overall gain in
I.!t(! speed control loop. Again these nonlinear functions would be cumber-
~O
lllC
to
realise with analogue circuitry
but
they
present no problems when
Illicrocomputers are employed for
the
controI.
/
/----
/-mM
tRel
+
mM
2
ReI
mM
ReI
/
/
/
"' il~.
tó.15.
Torque
functions for electrically preloading
of of
gear
train
t\llother example of a dual axis position controlled drive is shown in Fig.
I;).
1fi a.
It
could be
part
of
a machine tool or a
robot
with a mechanical
:
,t
rllcLul'c in cylindrical coordinates r,
f,
z, where each axis
is
activated by a
:;
('par;\I
:e
position controlled drive having
an
inner
torque
controlloop
with
!.II(!
eqllivalent lag Te. This
is
a simplification of
the
example discussed in
(:hap.
2.
For
th
e
particular
application
it
could be necessary to generate
I.!t,
!
r<'f(,fCll
ce
trajectory
in
x,
y, z-coordinates, while only machine
orientated
'I','
,
;;
-
1I1
Ci\S
Ur
ements are available. Clearly the motion in
the
z-direction is de-
,
'0
11
pkd
ir
it
is vertically
orientated
so
that
gravitational
effects are exclndcd I
1>11
t
ii,
trallsfornmtion bctwcen
(7'
, f) and (x,
y)
is
nceded.
It
can be proclll'ecl
I,,Y
I.
r
<i.
wJOrl
IlÍlI
I,
':
t.he
:G,
y··re
fc.
rence data.
int:o
polar
coordinat(~:;
or
iuv(
:rsely by
('()lIv"rl
,lrq':
t.\1('
'
I'
, ,,·
f(
!,!
dhack siguais iuto
carl.(!~jall
('()()rdilliLt
cR
j
I.h
e lirR
I.
P08-
lI
llti
lll.y
itl
('
h"
H"lI
for
1,\11'
1Ilino
l'O
lllplll,"I'
hIl
H,'
,j
(,oll!.rol
:i
l'l!"Jlll'
iII
FiJ~
,
1r" W
I,
h\
'
(
'
!l ll
tI
~
'
a
li
I.Iw illlll'r
"<lII!.r,,1
1I
IIII,·l.i'lIlI
:
an
'
1.111'11
I)(T
J'
"rl)lI'd
1
11
1.111'
a('
l.llnl
15.3 Linear
Position
Control with Moving Reference
Point
383
Y~
M
'
~
1
mM
E
a
x
Contjnuou~
I
Coord
inate :
Motion in
, Motion in
r
Bfe
renc~s
m: transfo
rmat
ion I
Decoupled
conlrol
cartesian
cartBSian
I :
polar
coordinates
f
in
polar
coordinatBs
: coordinatBS
coord
inates :
~
!
,
~
b r
ro2
8C:C
~
::~~ff~
,
I
:
'
l;;+;t--~,~r
,
·~t
--~~""'I
I
I
JRof
I +
,
r
lx<+i'
-
,
!t:ir
-ll--=-r,~"---
I
x<+i'
arctan{
b
Fig.
15.16.
Dual
axis
position
control in
polar
coordinates
with
reference signals
supplied
in
cartesian
coordinates
(
a)
Mechanical modelj
(b)
Block
diagram
drive coordinates.
The
set (x, y, Z
)Rej
would again be produced by a
suitable
reference
generator
.
Dynamic
coupling effects between
the
r,
f motions caused by centrifugaI
and
Coriolis-forces
can
be approximately compensated by
adding
suitable
corrective
terms
to
the
torque references, as was mentioned beforej
the
ef-
fectiveness of
this
method
of compensation, called inverse load modelling,
depends of course on a fast response of
the
inner
controlloops.
With
the
present
state
of microelectronics alI
the
control functions seen
in
Fig. 15.16 b
can
easily be executed with 1 kHz sampling frequency, which
would be
adequate
in
most
cases.
15.3
Linear
Position
ControI
with
Moving
Reference
Point
ln
Sect. 15,1
it
was mentioned
that
there
are cases, for example with
paper
mills, where
the
speed of each drive section
must
be controlled
with
high
pr
ecision in relative synchronism
to
the
speed of a neighbouring section.
This
task cnu
<tIRO
I)c ronsidered as a position control problem, where
the
reference
po!';iLi()1l
chall
lçl's
iII
sLeal\y st.at(· nt
CO[lst
n.
nt
vd
ocity,
As
an
exa
mple
the
di,c
il.
nl s
p(
·(·
d
nJIILl'ol
~
w
li
f
~JlI
(,
in
F'i,(,
1 :
1.1
'1
wl,i
l'
h Im
ll
h
(,
,
~
lI
d('vd()ppd prior
Lo
til<'
II
dv"liI, "r
IIl
kr
'
I\'I
I'
('
I,
rlll
dni
JlI
II
.y )1(' b
rk
lly d ili
r\l
H/
'h
'd
,
384
15.
Some
Applications
of
Controlled Electrical Drives
lt
is based on a conventional analogue speed control loop using, for ex-
ample, a
De
tachometer as a speed sensor. Due
to
unavoidable drift of
the
analogue components there is a normal control error, usually below
10-
2
of
Ilominal speed, which could, of course, be reduced by one or two orders of
Illagnitude,
but
only with considerable effort, such as
thermal
stabilisation of
the criticaI components,
and
at
high cost.
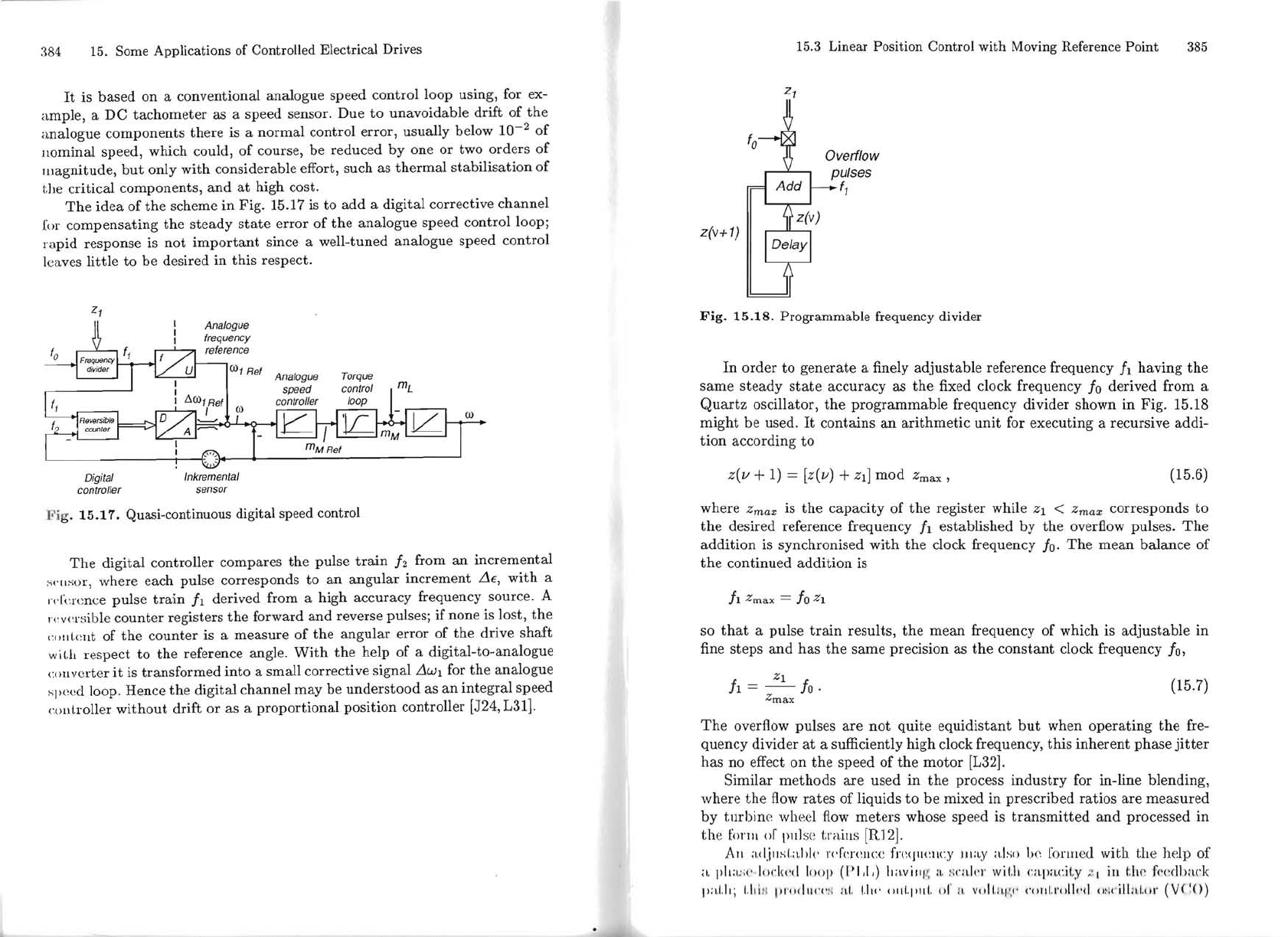
The
idea
of
the
scheme in Fig. 15.17
is
to
add
a digital corrective channel
for compensating
the
steady
state
error of
the
analogue speed control loop;
rapid
response
is
not
important
since a well-tuned analogue speed control
leaves little
to
be desired in
this
respect.
ZI
Inkremental
sensor
Digital
controller
Fi
g .
15.17.
Quasi-continuous digital speed control
The
digital controller compares
the
pulse
train
h from
an
incremental
S
('IISor
, where each pulse corresponds
to
an
angular increment
.dE,
with
a
Il'krence pulse
train
fI
derived from a high accuracy frequency source. A
I(
~
v(
~
rsible
counter registers
the
forward
and
reverse pulses; if none
is
lost,
the
t'()I\Lcnt
of
the
counter is a measure of
the
angular error
of
the
drive shaft
wiLh respect to the reference angle.
With
the
help of a digital-to-analogue
COIl
verter
it
is
transformed into a small corrective signal
.dWl
for
the
analogue
Sl)(~ed
loop. Hence
the
digital channel may be
understood
as
an
integral speed
conLroller
without
drift or as a proportional position controller [J24,
L31]
.
15.3
Linear Position Control with Moving Reference Point
385
Zl
Overflow
z(v+1)
Fig.
15.18.
Programmable frequency divider
ln
order
to
generate a finely adjustable reference frequency h having
the
sarne
steady
state
accuracy as
the
fixed clock frequency
io
derived from a
Quartz
oscillator,
the
programmable
frequency divider shown in Fig. 15.18
might be used.
It
contains
an
arithmetic
unit
for executing a recursive addi-
tion
according
to
z(v +
1)
= [z(v) + zd
mod
Zmax,
(15.6)
where
Zmax
is
the
capacity of
the
register while Zl <
zmax
corresponds
to
the
desired reference frequency
fI
established by
the
overflow pulses.
The
addition
is
synchronised
with
the
clock frequency
io.
The
mean
balance of
the
continued
addition
is
fI
zmax
=
io
Zl
so
that
a pulse
train
results,
the
mean
frequency of which is
adjustable
in
fine steps
and
has
the
sarne precision as
the
constant
clock frequency
io,
Zl
fI=
-io·
(15.7)
Z
ma
x
The
overflow pulses
are
not
quite equidistant
but
when
operating
the
fre-
quency divider
at
a sufficiently high clock frequency,
this
inherent phase
jitter
has no effect on
the
speed of
the
motor
[L32].
Similar
methods
are used in
the
process
industry
for in-line blending,
where
the
flow
rates of liquids
to
be mixed in prescribed ratios
are
measured
by
tnrbine
wheel
flow
meters whose speed is
transmitted
and
processed in
the
fmm
of
plll
s
(~
trains
[R12].
A1\ adjllsl.;\,hi<-
n'fcr<~llCC
frc(jll(:llcy
lJlay
abn
llC
formed with the
help
of
;~
plta
:w I<lc\\(,"
1<I<lp
(PI
,I
,)
1t;l.ViJI/
( H
~
i('
;d(
'r
wil.h
t'a.pa.<:ity
'::
1
iu
r.h(~
k c
<!hack
paLlI;
LI
,j
fi
pr"
"
111
,, ';1
aI.
LI\I'
,,"LplIl.
"I'
II
v"I
I.I
I
-/,
," n>lII.I'<lll,'d w:,·
ill
ll.
l.<l1'
(Vi
~O)
:1
86
15. Some Applications
of
Controlled Electrical Drives
ii
multiple of
the
constant
clock frequency, f =
zlfo,
which
may
then
be
rcduced by a scaler with capacity
Zmax'
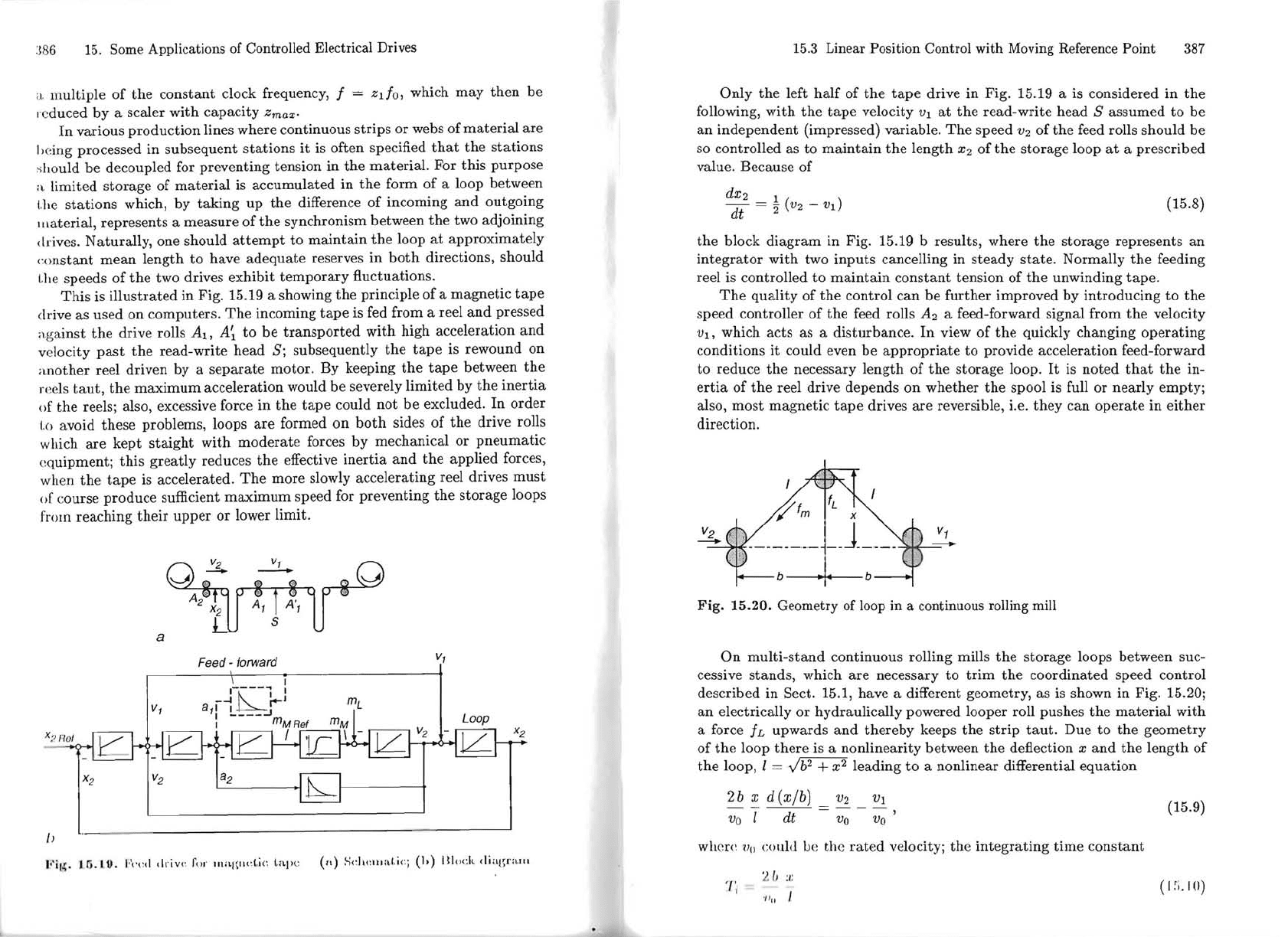
ln
various production lines where continuous strips or webs
ofmaterial
are
hcing processed in subsequent
stations
it
is
often specified
that
the
stations
.
~hould
be decoupled for preventing tension
in
the
material. For this purpose
a limited
storage
of
material
is
accumulated in
the
form of a loop between
t.he
stations
which, by
taking
up
the
difference of incoming
and
outgoing
IIIaterial, represents a measure of
the
synchronism between
the
two adjoining
drives. Naturally, one should
attempt
to
maintain
the
loop
at
approximately
co
nstant
mean
length to have adequate reserves in
both
directions, should
t.h
e speeds
of
the
two drives exhibit
temporary
fluctuations.
This
is
illustrated
in Fig. 15.19 a showing
the
principIe of a magnetic
tape
drive as used on computers.
The
incoming
tape
is fed from a reeI
and
pressed
a
.g
ainst
the
drive rolls
AI,
A~
to
be
transported
with
high acceleration
and
velocity
past
the
read-write
head
S;
subsequently
the
tape
is rewound on
a
nother
reeI driven by a
separate
motor. By keeping
the
tape
between
the
reels
taut,
the
maximum
acceleration would be severely limited by
the
inertia
of the reelsj also, excessive force
in
the
tape
could
not
be
excluded.
ln
order
1.0
avoid these problems, loops
are
formed
on
both
sides of
the
drive rolls
which are kept staight with
moderate
forces by mechanical or
pneumatic
equipmentj
this
greatly reduces
the
effective
inertia
and
the
applied forces,
when
the
tape
is
accelerated.
The
more slowly accelerating reeI drives
must
of course produce sufficient
maximum
speed for preventing
the
storage loops
from reaching
their
upper
or lower limito
a
VI
Feed - forward
\
.
I
.----..,
I
-I~I
1
./
ali
l:..i
m
L
:
a2
X2
v
2
----
mI\1R~A:11
/)
Jo'ir
~
.
1r;. I{lo I'
·h
:d d ri
v"
for
maglldi
c,
t.
npc
(1\)
Schcllml
,i
cj
(J.)
Blnel
, diugrn.m
15.3 Linear
Position
Control
with
Moving Reference
Point
387
Only
the
left
half
of
the
tape
drive
in
Fig
. 15.19 a
is
considered
in
the
following, with
the
tape
velocity
VI
at
the
read-write
head
S assumed
to
be
an
independent (impressed) variable.
The
speed
V2
of
the
feed rolls should
be
so controlled as
to
maintain
the
length
X2
of
the
storage loop
at
a prescribed
vaI ue. Because of
dX2
= t (V2 -
vd
(15.8)
dt
the
block
diagram
in Fig. 15.19 b results, where
the
storage represents
an
integrator
with
two
inputs
cancelling in
steady
state.
Normally
the
feeding
reeI
is
controlled
to
maintain
constant
tension of
the
unwinding
tape
.
The
quality
of
the
control can be further improved by introducing
to
the
speed controller of
the
feed rolls A
2
a feed-forward signal from
the
velocity
VI,
which acts as a disturbance.
ln
view of
the
quickly changing
operating
conditions
it
could even
be
appropriate
to
provide acceleration feed-forward
to
reduce
the
necessary length of
the
storage loop.
It
is noted
that
the
in-
ertia
of
the
reeI drive depends
on
whether
the
spool is full or nearly emptyj
also,
most
magnetic
tape
drives are reversible, i.e. they can
operate
in
either
direction.
I
Ifm
b .1. b
Fig.
15.20.
Geometry
of
loop
in
a continuous rolling mil!
On
multi-stand
continuous rolling mills
the
storage loops between suc-
cessive stands, which are necessary
to
trim
the
coordinated speed control
described in Sect. 15.1, have a different geometry, as
is
shown in Fig. 15.20;
an
electrically or hydraulically powered looper roll pushes
the
material
with
a force
h upwards
and
thereby keeps
the
strip
taut
. Due
to
the
geometry
of
th
e loop
there
is
a nonlinearity between
the
deflection x
and
the
length
of
the
loop, I = .Jb
2
+x
2
leading
to
a nonlinear differential equation
2b::.d(xjb)
V2_VI
(15.9)
Vo
I
dt
Vo Vo
whc
r<:
VII
coulel oe
th
c
rated
velocity;
the
integrating
time
constant
'J.
ii :1:
T,
(I~U())
'
/I"
I
389
:\
88
15. Some Applications or Co
ntroll
ed Electrical
Dri
ves
dcpends on
the
ratio
x/I, i.e.
the
shape
of
the loop.
x/L
= 1 corresponds
to
the
special case in Fig. 15.19 a.
Operating
the loop
at
smaU values
of
x / l becomes
increasingly difficult because
the
integrating
time
constant
is reduced;
this
calls for fast response
of
the
looper
and
the adjoining main mill drive used
for
controlling
the
loop.
The
force
1m
exerted on
the
material
is aIso a function
of
the loop geom-
ctry; in
relation
to
the
vertical force h exerted by
the
looper roll,
it
is
1m
1 I
(15.11)
IL
= 2 x '
;dso indicating a criticaI range
at
small values
of
x/I, where
the
gain becomes
very large.
A similar problem as with loop control arises with
automated
tracked
vchicles developed in recent years for
urban
transportation,
Fig.
15
.
21
a.
The
dis
tance
x
of
each vehicle to
the
leading vehicle
must
be
controUed
to
a speed-
dependent safe value
XRef
by applying driving or braking force
1M
~
O.
The
distance can be measured, for example, by
radar
or by sensing equipment
ill
stalled in
the
guideway.
--~-
-- - - - -
------,,--
f
M
'L
X
a
f
L
VI
b
Fil-:.
15.21.
Distance control
of
tracked
vehicles
(1\)
Sct.cma
ti
c;
(b)
Block
diagram
WIWII again
n
~
g
arding
the vclocity of the forward vchicle as an indepen-
dl:lI1.
di
s
l.llrl,all(:(
:, tlw control systcm for the distallce between the vc
hidcs
("(
)illd h
av
I:
t.l1('
fOl"I1\
ShOWll
ia
Fi
g. 15.
21
b. li:
J"('pr
c:;e
n(.
s a cascadcd
s
dl(
~
Jll.t:
"urIÜ t
illilll'
:
il
\l
l<'L"
1<l
l/
ps ror
UI(
: dri.v
i.
ug
r()r
c
~:
a
lI"
vdo
city.
Th(~
d('.Hirc,1
"i
s
t
ll
ll'·.·· .
1'1
1,.,
1,0
U
H'
"'/".d iu
l'.
v
dliclc
in
1'
:
('n
•.
'
l'I
l.
L ~
'
d
mi
l\
d,·lny,'d III
Ild
i
11(';1.1
.'
J'lIllcLÍ.OII
" r V<'!f1('1
I.
V,
1
11
1 "
KI
II
II.
I"I
,· II
I'
ll r,ll! H
,J
'1 1
\.j
,l
l'
l'
o
vi
lJl
lI
J.l
III\ Il l
li1
r
..
" r!
t.l
d
ll
l'.
di
:il.ll.lIl ·l '
15.4
Time-optimal
Position Control
with
Fixed
Reference
Point
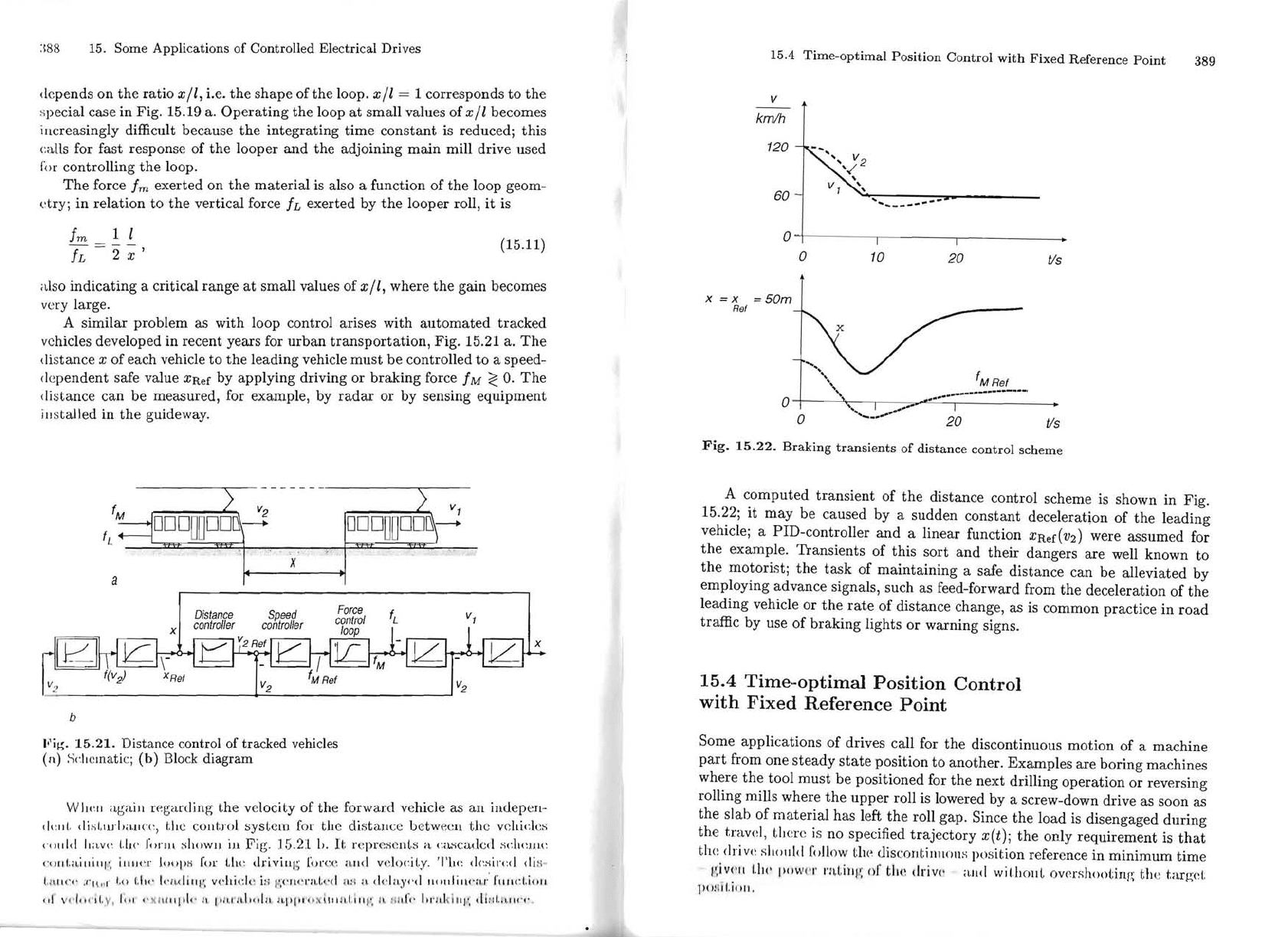
v
km/h
120
60
..
..
_--_
......
....
041
------,-
--
----,-------
__
o
10
20
tis
x =x =
SOm
Rei
'
........
\>,
"'-"""'"
f
MRef
"
"
"
O-t
O
--
...
-"
20
tis
Fig.
15.22.
Braking
transients
of
distance control scheme
A
computed
transient
of
the
distance control scheme is shown in Fig.
15.22;
it
may
be
caused by a sudden constant deceleration
of
the
leading
vehicle; a PID-controller
and
a linear function
XRef(V2)
were assumed for
the
example. Transients of this sort
and
their
dangers are well known to
the
motorist;
the
task
of
maintaining
a safe distance can be alleviated by
employing advance signals, such as feed-forward from
the
deceleration
of
the
leading vehicle
or
the
rate
of
distan
ce change, as is common
pra
ctice in
road
traffic by use
of
braking lights
or
warning signs.
15.4
Time··optimal
Position
ControI
with
Fixed
Reference
Point
Some applications
of
drives call for
the
discontinuous motion of a machine
part
from one
steady
state
position to another. Examples are boring machines
where
the
tool
must
be
positioned for
the
next drilling operation
or
reversing
rolling mills where
the
upper
rolI is lowered by a screw-down drive as soon as
the slab
of
ma
terial
has left
the
roU
gap. Since
the
load
is
disengaged
during
th
e
tr
ave
I,
thcr
e is no specified
traj
e
ctory
x(t) ;
the
only requirement is
th
at
tIl<:
driv
(~
sllOlIld follow tlw disc
ontiJlllOIlS
position reference in minimum
tim
e
l:
iv
('" I.he
po
wer
ra
.t.illl';
nr
til(' driv(' alld w
il
.hollL ovr rs
hooting
th
e
targ
c
l:
pO:
ií
l.illll
,
:\90
15. Some Applications
of
Controlled Electrical Drives
With
the
assumption
that
•
the
response
time
of
the
torque control loop
can
be
neglected,
•
the
jerk, i.e.
the
derivative
of
acceleration, need
not
be
restricted (which
would
be
necessary if a
transportation
system
with
on-board
passengers
or
a weakly
damped
mechanical
structure
were involved),
•
the
frictional torques are ignored,
I.he
drive
with
the
associated mechanicallinkages can
be
approximated
by a
double
integrator
having
the
acceleration a(t) as
input
and
the
position x(t)
itS
output,
as seen in Fig. 15.9.
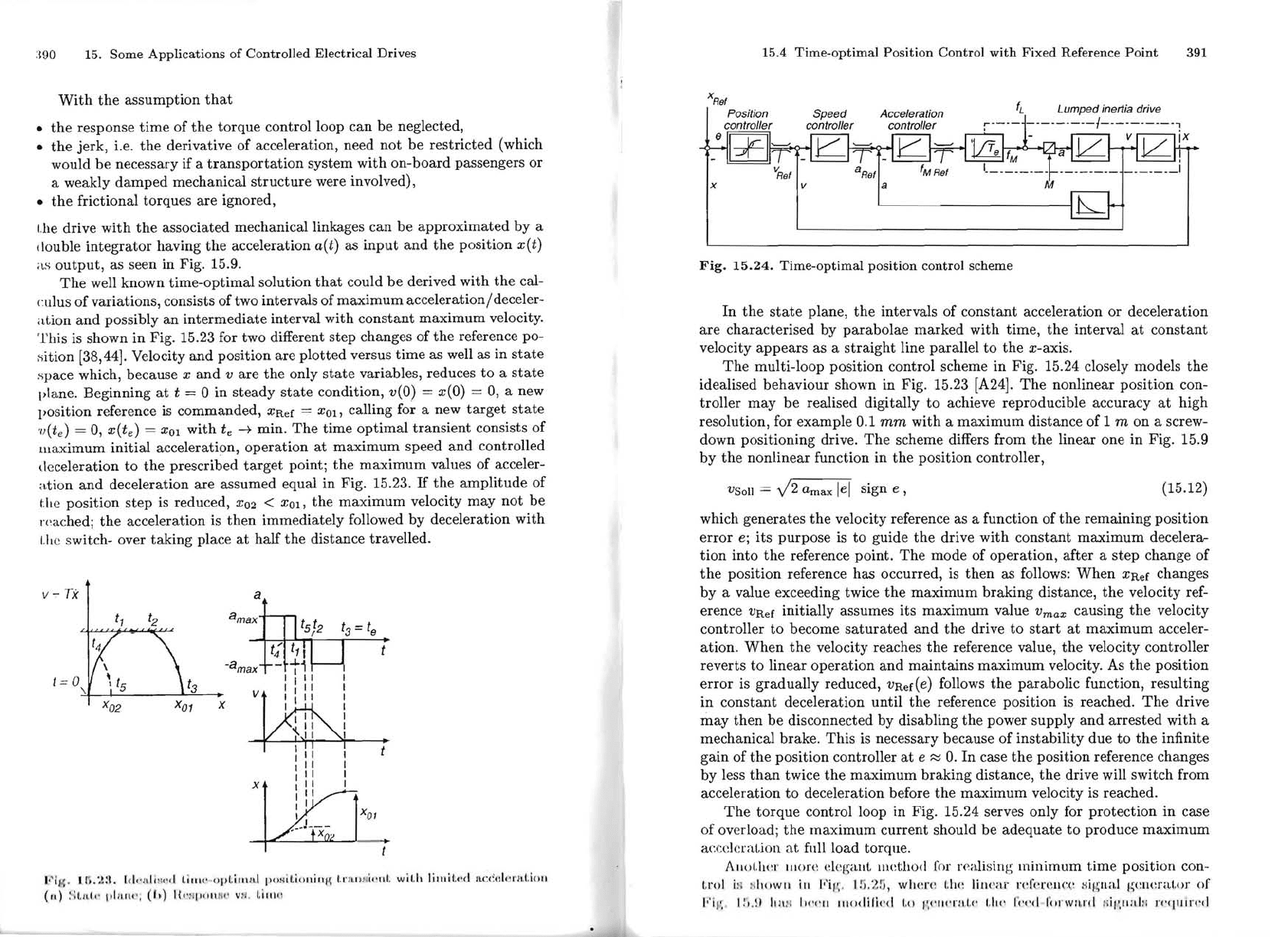
The
well known time-optimal solution
that
could
be
derived
with
the
cal-
culus
of
variations, consists
of
two intervals
of
maximum
accelerationj
deceler-
ittion
and
possibly an intermediate interval with
constant
maximum
velo city.
This is shown
in
Fig. 15.23 for two different step changes
of
the
reference po-
sition [38,44]. Velo city
and
position are
plotted
versus
time
as well as
in
state
space which, because x
and
vare
the
only
state
variables, reduces
to
a
state
pl
ane. Beginning
at
t = O in
steady
state
condition,
v(O)
=
x(O)
=
O,
a new
position reference is commanded,
XRef
=
XOl,
calling for a new
target
state
'II
(t
)
=
O,
x (te) = XOl
with
te
--+
mino
The
time
optimal
transient consists
of
e
lII
ax
imum
initial acceleration,
operation
at
maximum
speed
and
controlled
deceleration
to
the
prescribed
target
point;
the
maximum
values
of
acceler-
ation
and
deceleration are assumed equal in Fig. 15.23.
If
the
amplitude
of
t,h
e position step is reduced,
X02
<
XOl,
the
maximum
velocity may
not
be
r('ached;
the
acceleration is
then
immediately followed by deceleration with
I.h
e switch- over taking place
at
half
the
distance travelled.
v-
Ti<
a
a
ma
x
-a
max
t
3
v
X0
1
x
x
X
OI
FI
l{.
1r .
...
~
:L
Id'·ldin,
·,1
Lim
.,'-op(I,iJ
lIl..!
1"'
~II
,
ionill,
{
!.n l
ll
!l
;"
U
(,
wil.h lilll i
kd
1l
c<~
c:I"
r1~
l.i
o
ll
(n)
~
H,
J
t..
h
·
1'
1t
111t
'1
(J.,
)
1t1'
)l t
)
(
IH
I
U
~
vr
f.
1,llIl
n
15.4
Time-optimal
Position
Control
with
Fixed
Reference
Point
391
f
L
Fig.
15.24.
Time
-
optimal
position control scheme
ln
the
state
plane,
the
intervals
of
constant
acceleration
or
deceleration
are
characterised by
parabolae
marked
with
time,
the
interval
at
constant
velocity
appears
as a
straight
line parallel
to
the
x-axis.
The
multi-Ioop position control scheme
in
Fig. 15.24 closely models
the
idealised behaviour shown in Fig.
15
.
23
[A24]
.
The
nonlinear position con-
troller
may
be
realised digitally
to
achieve reproducible accuracy
at
high
resolution, for example 0.1
mm
with a
maximum
distance
of
1 m on a screw-
down positioning drive.
The
scheme differs from
the
linear one
in
Fig. 15.9
by
the
nonlinear function in
the
position controller,
VSoll = v 2 a
m
ax
lei
sign
e,
(15.12)
which generates
the
velo city reference as a function
of
the
remaining position
error
e;
its
purpose
is
to
guide
the
drive
with
constant
maximum
decelera-
tion
into
the
reference point.
The
mode
of
operation, after a
step
change
of
the
position reference has occurred, is
then
as follows:
When
XRef
changes
by
avalue
exceeding twice
the
maximum
braking
distance,
the
velo city ref-
erence
VR
ef initially assumes
its
maximum value V
max
causing
the
velocity
controller
to
become
saturated
and
the
drive
to
start
at
maximum
acceler-
ation.
When
the
velo city reaches
the
reference value,
the
velocity controller
reverts
to
linear o
peration
and
maintains
maximum
velo city. As
the
position
error
is
gradually
reduced, VRef(e) follows
the
parabolic function, resulting
in
constant
deceleration until
the
reference position is reached.
The
drive
may
then
be
disconnected by disabling
the
power supply
and
arrested
with
a
mechanical brake. This is necessary because
of
instability due
to
the
infinite
gain
of
the
position controller
at
e
~
O.
ln
case
the
position reference changes
by less
than
twice
the
maximum
braking distance,
the
drive will switch from
acceleration
to
deceleration before
the
maximum
velo city is reached.
The
torque
control loop in
Fig
. 15.24 serves only for protection in case
of
overload;
the
rnaximum current should be
adequate
to
produce
maximum
ace
e!
craLion at
fnU
load torqlle.
1\
lIo(.\wr
1I1
()
f(
~
<'!
e
f.Ç
i.t
Ilt
llldh
od
for
n'
a.li
sing lninirnum time position con-
l.rol ili ·,d" 'w
II
i
II
II'i
,
~
.
I
fi,
2;' ,
wh(
~
J'(~
i.l\(
~
lill<'ilí'
rd crf'
ll('(
' Kiglln.l
w
~ncrnL()r
of
I,'il',' I
~,
.
H
1,
1111
1"
,(,
11
1I""lili"d
l."
,',
"1\1'1'
:.1
.1.,
' 1.
1",
r,
',·
,I
-r
"rw
nr,1 ;;i,.,lI i
t.l:
l
)'I"llIi!"
'
,1
:\!)2
15.
Some
Applications
of
Controlled Electrical Drives
I
-.
X
7
I~arget
X
Flef
V
Ref
a
Ref
Fig.
15.25.
Dynamic reference
mo
dei
for
minimal-time position control
ror
time-optimal
transients.
The
advantage of
this
arrangement is
that
the
coutrol system proper remains unchanged, i.e. linear
and
optimally tuned.
'I
°lte choice, whether
the
transients
should
be
linear
or
time-optimal is solely
ddermined
by
the
reference model; this
structure
is particularly
suited
for
illlplementation
on
a microcomputer.
As a
further
variation,
the
nonlinear function
in
Fig. 15.25 is modified
around
zero (in dashed lines)
to
prevent overshoot
and
to
achieve a
stable
nmtrol
mode
at
the
reference position.
The
advantages
of
both
control
strate-
l\
ies are
then
combined: For large position error,
the
drive performs nearly
I.ime-optimally while
it
becomes linear once
the
position error
has
entered a
Ilarrow range
around
steady
state
condition;
the
sarne could be applied to
Lhe
position controller in Fig. 15.24.
It
has
been mentioned
that
the
second order approximation is only appli-
cable
as
long
as
the
residuallag
of the torque
controlloop
can
be
neglected.
'I
'hus
t.he
application of this control scheme is restricted
to
converter supplied
~
Rel
!
I t
Fttrr
I
I
I I
I I
~
I
I
I
I
t
~
I
t
I I
-r;-
tt.
IVX
~
I
.II"
I
~Posítion
v
~
v~
x
X
Slnl
e
plano
~
F
ig
. H •. :.W. M inll.II"
.!
1'.il
lL
'·
I'0 ~
il.i,,"i"
g
1.1'Il1I
::
i'·IIt.
1I
wi
t.h
difr"lt
lld.
ill
it.il\l (·
olldil.ioIlH
15.4
Time-optimal Position Control with Fixed Reference Point
393
DC
or
AC drives having
an
effective lag
of
the
torque loop of a few
ms.
A
time-optimal
transient
of
an
AC servo drive was shown in Fig. 14.9; some
simulated transients, assuming different initial conditions, are
plotted
in Fig.
15.26.
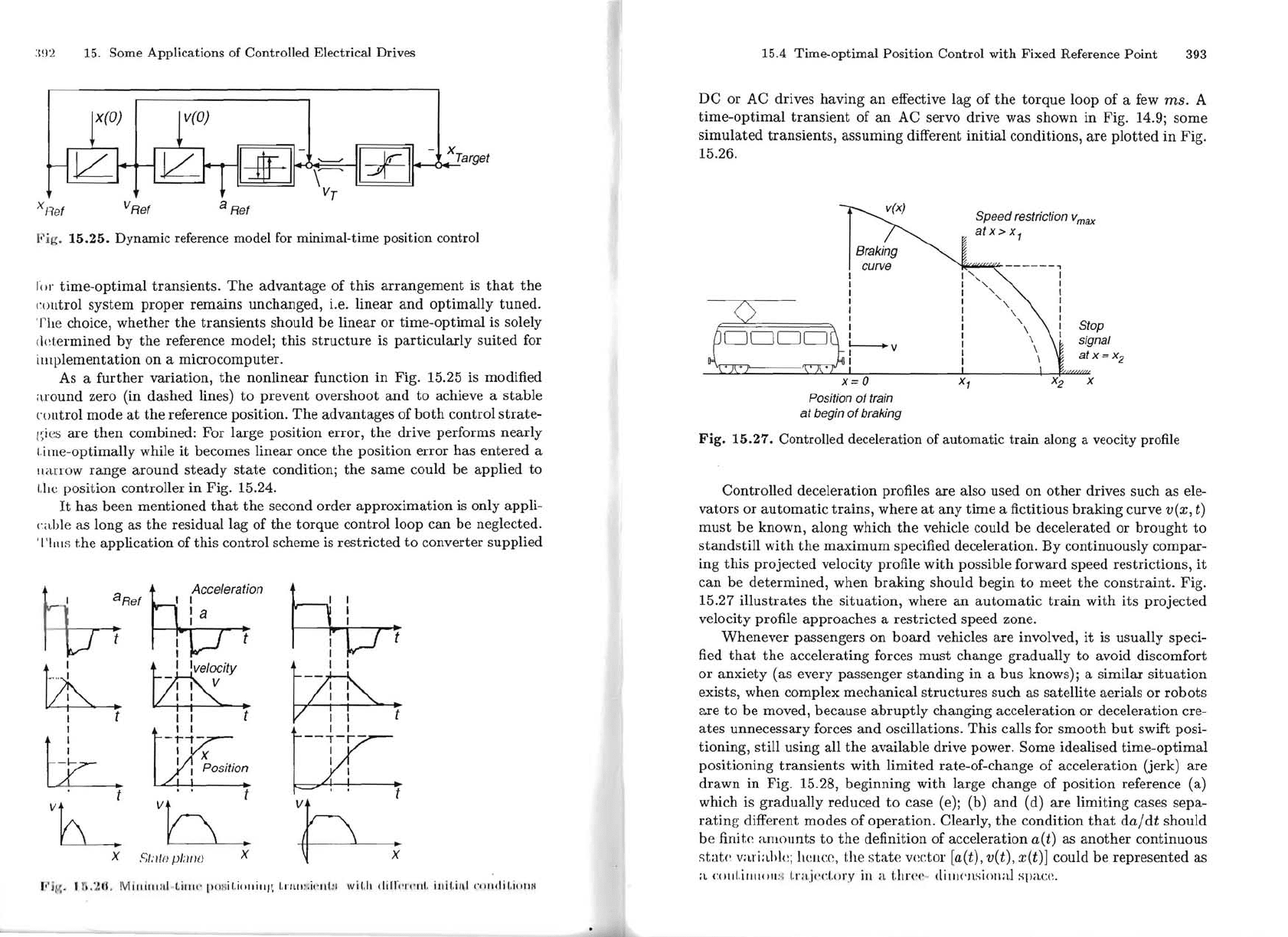
v(x)
Speed restríction v
max
at
x > x 1
Braking
curve
------,
I
I ,
I
I ,
I "
I
I
I "
I
:
I '
\ \
I
e
~!-v
'\
1
",,,
~~;:x2
x=o x
x2
x
1
Position
of
traín
at
begín
of
brakíng
Fig.
15.27.
Controlled deceleration of automatic train along a veocity profile
Controlled deceleration pro files are also used on
other
drives such as ele-
vators
or
automatic
trains,
where
at
any
time
a fictitious braking curve v(x,
t)
must
be
known, along which
the
vehic1e could
be
decelerated or
brought
to
standstill
with
the
maximum
specified deceleration.
By
continuously compar-
ing
this
projected velo city profile
with
possible forward speed restrictions,
it
can
be
determined, when
braking
should begin
to
meet
the
constraint. Fig.
15.27
illustrates
the
situation,
where
an
automatic
train
with its
projected
velo city profile approaches a restricted speed zone.
Whenever passengers
on
board
vehic1es are involved,
it
is usually speci-
fied
that
the
accelerating forces
must
change gradually
to
avoid discomfort
or
anxiety (as every passenger
standing
in
a bus knows)j a similar
situation
exists, when complex mechanical
structures
such as satellite aerials
or
robots
are
to
be
moved, because
abruptly
changing acceleration
or
deceleration cre-
ates
unnecessary forces
and
oscillations. This calls for
smooth
but
swift posi-
tioning, still using all
the
available drive power. Some idealised time-optimal
positioning
transients
with limited rate-of-change
of
acceleration (jerk) are
drawn
in
Fig. 15.28, beginning
with
large change
of
position reference (a)
which is
gradually
reduced
to
case (e); (b)
and
(d) are limiting cases sepa-
ratin
g differe
nt
modes of operation. Clearly,
the
condition
that
da/dt should
be
finit.c
~
muo
unts
to
th
e definition
of
acceleration a(t) as
another
continuous
st
a
tp
va.riahk
j IWllc
e,
the s
tate
v(
~
ctor
[a(t), v(t), x(t)] could be represented
as
a
cOIILillll()II:
4
I.r;l
,
j""
.I.ory
ill
1t
1'.
111"('(
' dillH'Jlsiolla,1
Spi\.
CP
.
- 2008 — 2025 «СтудМед»