Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

180
10.
Symmetri
caI
Three-Phase
AC Machines
1
+
O'
_ 1 -
O'
1 -
~
~l
Is
=
Iso
[
2
O'
2
O'
1 +J
sp
1+0'
_1-0'
e-j2arctans
/
sp],
=
Iso
[
(10.73)
20' 20'
where
Il.
s
Iso
= j
Wl
Ls
(10.74)
is
the
ideal no load
current
valid for S =
O,
i.e. when
the
rotor
moves syn-
chronously
with
the
revolving
stator
field.
When
no speed difference exists,
no
rotor
current
will be induced
and
there
is no torque; hence
the
no-load
current
is a purely reactive magnetising current.
This
is in agreement with
the
equivalent circuits in Fig. 10.7 for S =
O.
Active current
(motoring)
!,Is
.I.
S
.
/"
Sp
/
- J
so
2
cr
,
JSD
2
cr
1
,
~
1-
cr
e -
j2
are
ta{
Sp
1
Js
cr
JSD
Reactive current
JSD
1+
cr
(ínductíve)
-1
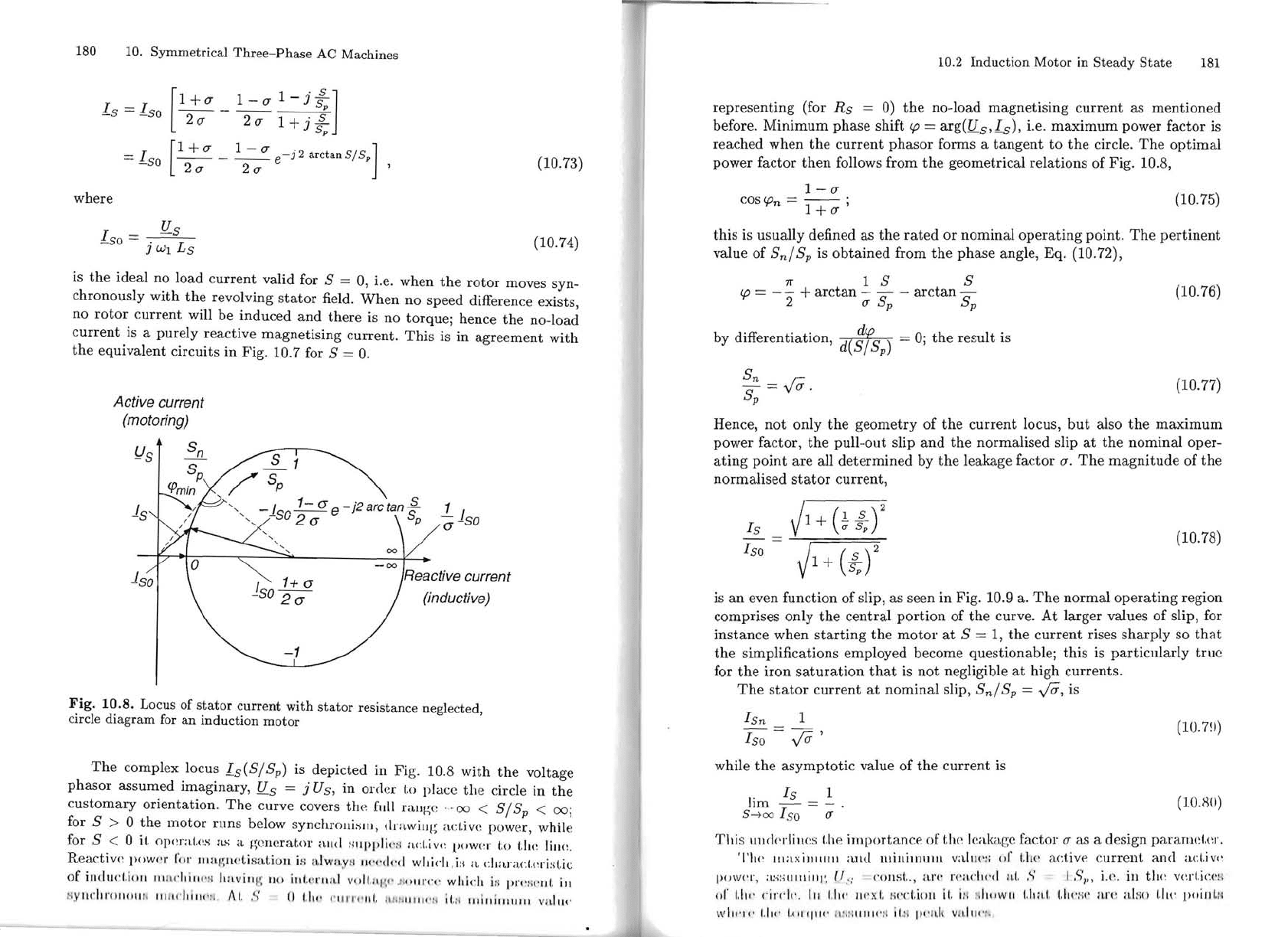
Fig.
10.8.
Locus of
stator
current
with
stator
resistance neglected,
circIe
diagram
for
an
induction
motor
The
complex locus
Is
(S/
Sp) is depicted in Fig.
10
.8 with
the
voltage
phasor
assumed imaginary, U5 =
jUs,
in order to place
th
e circle in
the
customary
orientation.
The
curve covers
the
fllll
rall~
C
"00
<
S/Sp
< 00;
for S > O
the
motor
runs
below
synchrolli~IIJ
,
drawillg acl.ive power, while
for
S < O
iI,
op(
~
ral.(~s
as a gcnerat,ol' alld
Sl1ppli('
/ol
1\cl.iv(
~
pow(
~
r
to
t1w
lilln.
Reactiv(
~
pown
l'
ror lllil
(f,
lwtisatioll is
il.lwa
Y
~
1
11(.,..11'11 whi('h ,i!l n
dmr
a
('.I.(~ri!;tic
of
illdllt'l.ioll
1I
1I
\f
I
Ii
Il
('1i
Jlil.vil
lj
(
110
illl."l'IlII.J v,,JI.
II
II.
'·
11
11111'("( '
whi('h
ir,
pn
·r;
(·IJI.
iII
HY
III·h,.IIl1
ll
ll
il
Il
lhe
lllll(
'"
. til. S
II
1.1".
1'1
111"'11
1.
HIi!!
" " " '
!1
il.
rl
II
d
llillllllll
vIL
III"
10.2
Induction
Motor
in
Steady
State
181
representing
(for
Rs
=
O)
the
no-load
magnetising
current
as
mentioned
before.
Minimum
phase shift
cp
= arg(U5,1
5
),
i.e.
maximum
power factor is
reached when
the
current
phasor
forms a
tangent
to
the
circle.
The
optimal
power factor
then
follows from
the
geometrical relations of Fig. 10.8,
1-0'
COS(
() =
-_.
(10.75)
rn
1 +
O'
'
this is usually defined as
the
rated
or
nominal
operating
point.
The
pertinent
value of
Sn/
Sp
is
obtained
from
the
phase angle,
Eq
. (10.72),
7r 1 S S
cp
=
--
+
arctan
- - -
arctan-
(10.76)
2
O'
Sp Sp
by differentiation,
d(trSp)
=
O;
the
result is
~n
=
VU.
(10.77)
p
Rence,
not
only
the
geometry
of
the
current
locus,
but
also
the
maximum
power factor,
the
pull-out slip
and
the
normalised slip
at
the
nominal
oper-
ating
point
are all
determined
by
the
leakage fac
tor
0'.
The
magnitude
of
the
normalised
stator
current,
Is
V1+(~ff;r
(10.78)
Iso
VI
+
(ir
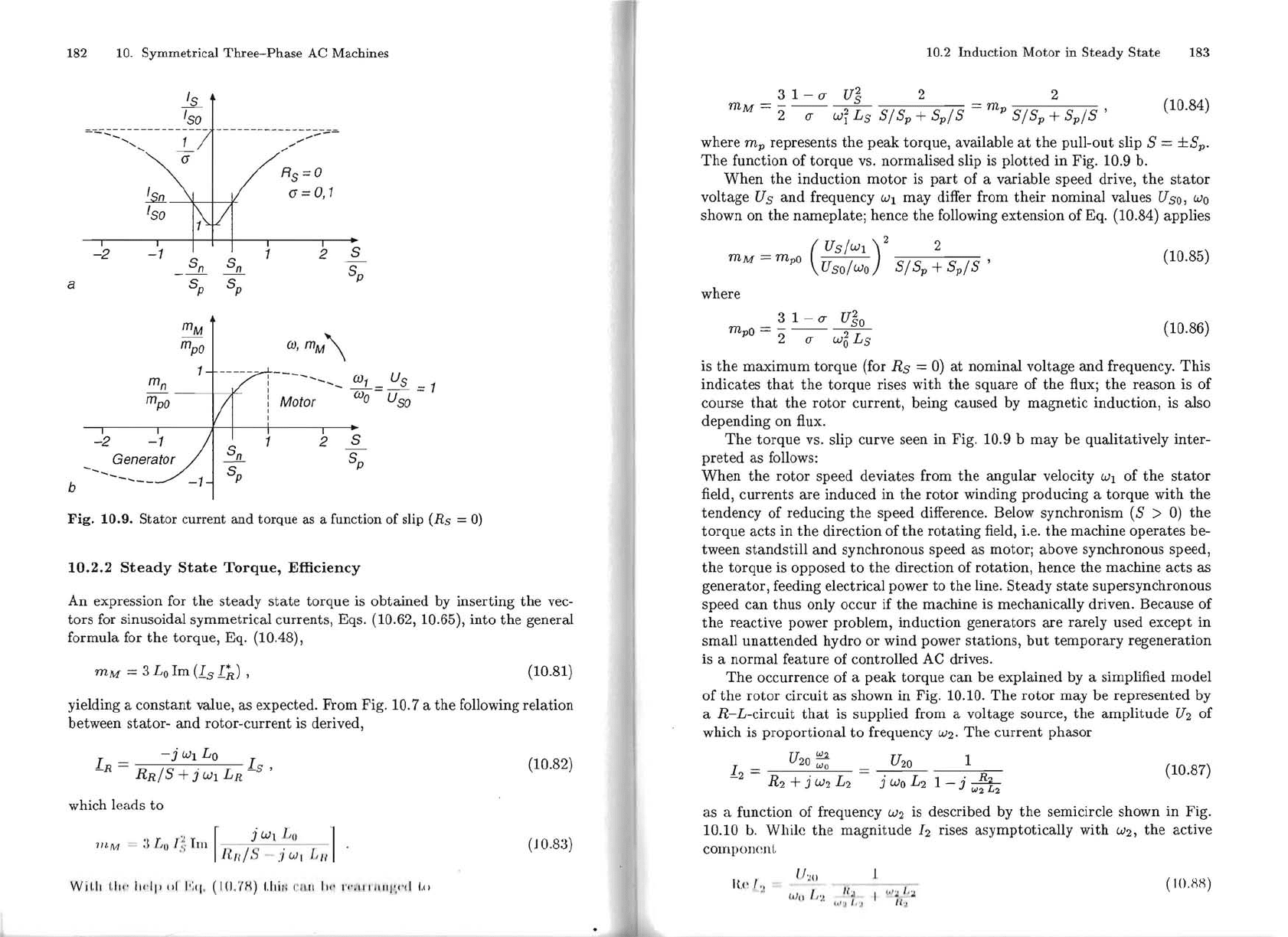
is
an
even function
of
slip, as seen in Fig. 10.9 a.
The
normal
operating
region
comprises only
the
central
portion
of
the
curve.
At
larger values of slip, for
instance
when
starting
the
motor
at
S = 1,
the
current
rises sharply so
that
the
simplifications employed become questionable; this
is
particlllarly
true
for
the
iron
saturation
that
is
not
negligible
at
high currents.
The
stator
current
at
nominal slip,
Sn/
Sp
=
y'ci,
is
IS
n
1
(10.
7!l)
Iso =
y'ci
,
while
the
asymptotic
value
of
the
current
is
Is
1
fim -
(lO.
BO)
5-400
Iso
O'
Tllis ull(krlillCS I.he
importance
of
lhe
feakage factor
O'
as a design
pararnd(
~
r.
'I'lw III<\ X
illllllll
;tJl(.l
ruilLimulU
val!i(':;
"f
til"
ac:t.i
ve
current
anel
acl.i
v,~
pO\V('r, ;1,S;;
lIl1lilll'.
Ii
..: ('OIlSt..,
;t
J'('
1'1'11..-111'11
H,
1.
S 1''''1''
i.".
in
tlw
v(
~
rl.i(
:
(·
n
(lI'
1,111'
..
ird,·.
I"
LIli'
III'
X
I.
r
ó(
·(·
I.j"lI
íl. 1:1 !
.h"wlI
I.h:d
.
LlI<'
:'w
a.re
al ~
()
1.11('
poilll.:.1
wl"'I"
1.111'
1."1
ii""
11
:.
/1
111111'11
iI
,
1I
P
('
I
t!
( vr
dll'·
:.
182
10.
Symmetrical Three-Phase
AC
Machines
~
ISO
~~--------------I1
-
---------------;~
--',
1
//;-
,---
/
RS=O
(J
=0,1
~
ISO
I I
-2
-1
2
S
-~
~
Sp
a
Sp Sp
,
mM
m
po
úJ,m
M
\
1-----
....
__
I
úJ
1
_
U
s
= 1
I
úJ
o
-
Uso
m
n
:
Motor
m
po
I
I
I I
-2
-1
2
S
Generator
Sp
------------'
-1
b
Fig.
10.9.
Stator current and torque
as
a function of slip
(Rs
=
O)
10.2.2
Steady
State
Torque,
Efliciency
An
expression for
the
steady
state
torque
is
obtained
by inserting
the
vec-
tors
for sinusoidal
symmetrical
currents,
Eqs. (10.62, 10.65),
into
the
general
formula for
the
torque,
Eq
. (10.48),
mM
= 3 Lo 1m (Is
IR)
,
(10.81)
yielding a
constant
value, as expected.
From
Fig. 10.7 a
the
following
relation
between
stator-
and
rotor-current
is derived,
-j
w}
Lo I
(10.82)
I L
-s,
-R=
RR
I
S+jw}
R
which leads
to
' j
wl
I,o I.
mM
(10.8:3)
:\
r'lI
l
,~;
TIll
[
ali
IS
.i
W I [,1/
Wil.li
1.111'
111'11'
"I
1-:'1
,
(I
(J
,'
tH)
I,liil: ('
11 11
1"
,
)"',111
11
111'
,
""
L..
10.2
Induction Motor
in
Steady State 183
3 1 -
(J
U~
2 2
mM
=
-------
=m
p
---
(10.84)
2
(J
w?
Ls
SISp +
SpIS
SISp +
SpIS
'
where
mp
represents
the
peak
torque,
available
at
the
pull-out slip S = ±Sp.
The
function
of
torque
vs,
normalised
slip is
plotted
in
Fig. 10.9 b.
When
the
induction
motor
is
part
of
a variable
speed
drive,
the
stator
voltage U s
and
frequency
w}
may
differ from
their
nominal
values
Uso,
Wo
shown on
the
nameplate;
hence
the
following
extension
of Eq. (10.84) applies
Uslw}
2
2
mM
= mpo
(10.85)
(
Usolwo
)
SIS
p
+
SpIS
'
where
3 1 -
(J
U~o
mo=-------
(10.86)
p 2
w5
Ls
(J
is
the
maximum
torque
(for Rs =
O)
at
nominal
volt age
and
frequency.
This
indicates
that
the
torque
rises
with
the
square
of
the
flux;
the
reason is of
course
that
the
rotor
current,
being
caused
by
magnetic
induction,
is also
depending
on
fluxo
The
torque
vs. slip
curve
seen
in
Fig. 10.9 b
may
be
qualitatively
inter-
preted
as
follows:
When
the
rotor
speed
deviates
from
the
angular
velo city
w}
of
the
stator
field,
currents
are
induced
in
the
rotor
winding
producing
a
torque
with
the
tendency
of
reducing
the
speed
difference. Below synchronism
(S
>
O)
the
torque
acts
in
the
direction
of
the
rotating
field, i.e.
the
machine
operates
be-
tween
standstill
and
synchronous speed
as
motor;
above
synchronous speed,
the
torque
is opposed
to
the
direction of
rotation,
hence
the
machine
acts
as
generator,
feeding electrical power
to
the
line.
Steady
state
supersynchronous
speed
can
thus
only
occur
if
the
machine is mechanically driven. Because of
the
reactive power
problem,
induction
generators
are
rarely used
except
in
small
unattended
hydro
or
wind
power
stations,
but
temporary
regeneration
is a
normal
feature
of controlled AC drives.
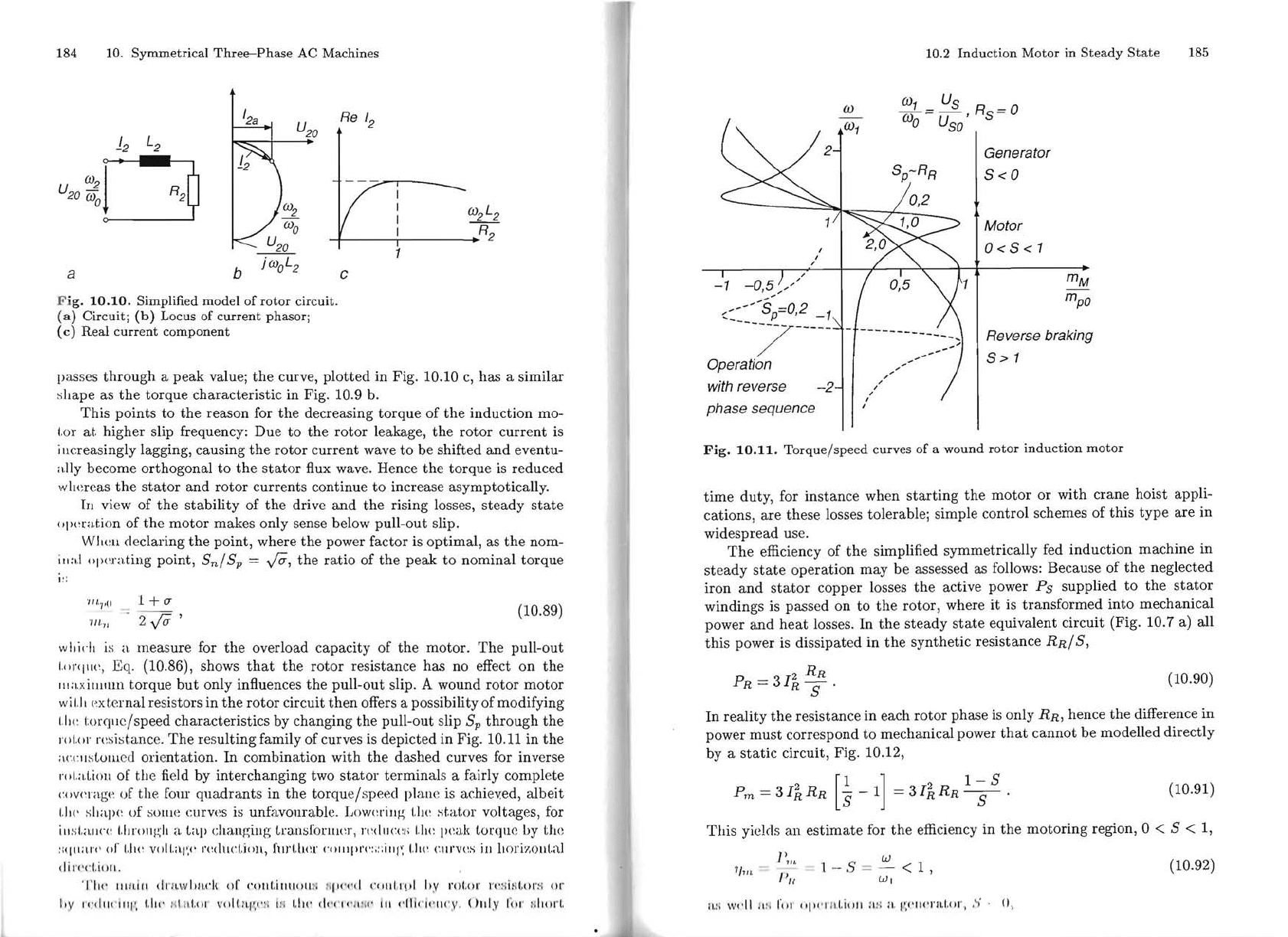
The
occurrence
of
a
peak
torque
can
be
explained
by a simplified
model
of
the
rotor
circuit as shown
in
Fig. 10.10.
The
rotor
may
be
represented
by
a
R-L-circuit
that
is
supplied
from a voltage source,
the
amplitude
U
2
of
which is
proportional
to
frequency
W2.
The
current
phasor
U
~
20
Wo
U
20
1
----
(10,87)
I
2
= R
2
+ j
W2
L
2
jwOL2
1-j
~
W2
L2
as a
function
of
frequency
W2
is described by
the
semicircle shown in Fig.
10.10 b,
While
the
magnitude
h rises
asymptotically
with
W2,
the
active
compon
e
nl.
(}~
:
o
1
H,
('
/
'.1
(IO,RR)
II
~
ti/
:l
l
i
~
ii
.!
" I
J'
.~
101
.. 1, .
.1
/I
"
184
10.
Symmetrica!
Three-Phase
AC Machines
U
20
Re
'2
J
2
L
2
U
2
0~O
W
2
I
w
2
L
2
W
o
I
I
I
U
20
~
.R
2
j W
O
L2
a
b
C
Fi
g.
10.10.
Simplified mode!
of
rotor
circuito
(
a)
Circuitj
(h)
Locus of
current
phasorj
(
c)
Real
current
component
passes
through
a
peak
value;
the
curve,
plotted
in Fig. 10.
10
c,
has a similar
s
hape
as
the
torque characteristic in Fig. 10.9 b.
This points
to
the
reason for
the
decreasing
torque
of
the
induction mo-
tor
ato
higher slip frequency: Due
to
the
rotor
leakage,
the
rotor
current
is
increasingly lagging, causing
the
rotor
current wave
to
be shifted
and
eventu-
ally become orthogonal
to
the
stator
flux wave. Hence
the
torque
is
reduced
whereas
the
stator
and
rotor
currents continue
to
increase asymptotically.
TIl
view of
the
stability of
the
drive
and
the
rising losses,
steady
state
opnat.ion
of
the
motor
makes only sense below pull-out slip.
WhCll declaring
the
point, where
the
power factor
is
optimal, as
the
nom-
ill:!.1
op,'rat.ing point, Sn/Sp = fo,
the
ratio
of
the
peak
to
nominal torque
I"
'111
'
1.
0
_
1 +
(7
(10.89)
'
1I1
'
JI
- 2
fo
'
whidl
is a measure for
the
overload capacity
of
the
motor.
The
pull-out
I"rqllv
,
Eq
, (10.86), shows
that
the
rotor
resistance has no effect on
the
11I;\
,xiUIIIIll torque
but
only influences
the
pull-out slip. A wound
rotor
motor
wi
Ih
,
~xt:e
rnal
resistors in
the
rotor circuit
then
offers a possibility of modifying
lhe
torqllc
/speed
characteristics by changing
the
pull-out slip
Sp
through
the
rot.or
rc
sist.anc
e.
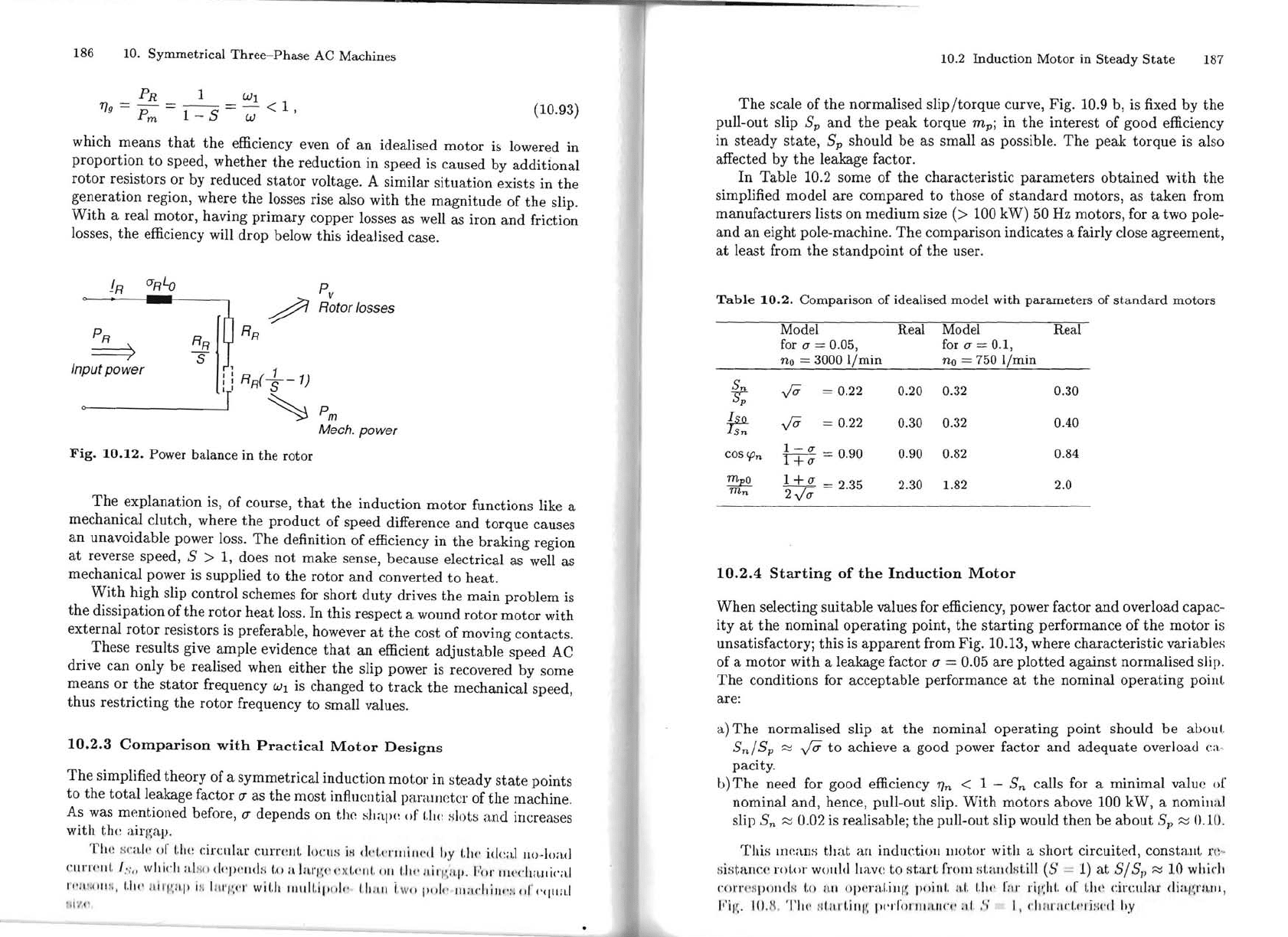
The
resulting family of curves is depicted in Fig. 10.
ll
in
the
;\,n :
ll
stoIllcd orientation.
ln
combination with
the
dashed curves for inverse
rol.aÜOll
of
th
e field by interchanging two
stator
terminais a fairly comple
te
wvnag<
~
of
the
four
quadrants
in
the
torque/
speed plane is achieved, albeit
1.\1('
s
liape
of S
OlllC
eurV($ is unfavourable.
Lowcrilll-!;
the
st.at.
or voltages, for
iIl
S
t,"'Il(,(
~
I.hwll
f.':
1t
a
tap
cltanl'-(illg
trans[oollcr,
l"(~dIlCCI
;
Lhe
peak
torqll
c by the
::
(\,,<1.1'"
0
1'
l,b
<'
voll.a!';
,'
\'(~dIlCl.i()lI, f\lrt.ll<~r
('olllpr('::: :
illl';
1.11('
(",IlJ'V(~S
itt
bori
7.
Olll.al
"íI"
'('
I.
LO
II,
'1'11('
IlIn
i
ll
dI/
tiNI
,"
,
(,1,
01'
(·Olll.íIlIIOIl
!:
11
(
1("
'" '·"lI
l.
lt" I.y
rol.o!'
}"('SíH
I.O!'
K
(lI'
I',V l'q
l\I"III'i'
,
til"
H\ l tI,1i
1'
vnl
i'.H
I'."
t' b UI!'
<I"I
" "!,
'II
' 1
,1
d
ll<"i
"II"
'y
,
("!ly
/;,
1'
n
llll
r
l.
10.2
Induction
Motor
in
Steady
State
185
W
!:!L= U
s
,
RS=
O
Generator
S<O
Motor
0<S<1
mM
m
pO
Reverse braking
S>1
W1
2
/
-1
-0,5
~/
(:~-/S~=0,2
-1
--/-------
Operation
with reverse
-2
/
/
/
W
o
USO
/ /
----
/
/
phase sequence
Fig,
10.11.
Torquejspeed
curves
of
a
wound
rotor
induction
motor
time
duty, for instance when
starting
the
motor
or with crane hoist appli-
cations,
are
these los ses tolerablej sim pie control schemes of
this
type
are in
widespread use.
The
efficiency of
the
simplified symmetrically fed
induction
machine in
steady
state
operation
may
be
assessed as follows: Because of
the
neglected
iron
and
stator
copper losses
the
active power Ps supplied
to
the
stator
windings is passed on
to
the
rotor, where
it
is transformed into mechanical
power
and
heat
losses.
ln
the
steady
state
equivalent circuit (Fig. 10.7 a) alI
this
power is dissipated in
the
synthetic resistance
RR/
S,
P =
31
2
RR
(10.90)
R
RS'
ln
reality
the
resistance in each
rotor
phase
is
only
RR,
hence
the
difference in
power
must
correspond
to
mechanical power
that
cannot
be modelled directly
by a
static
circuit, Fig. 10.12,
[1
]2 2
l-S
(10.91)
Pm
=
31
R
RR
S
-1
=
31
R
RR
-S-
·
This
yields
an
estimate
for
the
efficiency in
the
motoring
region, O< S <
1,
1 '",
W
I - S =
-<
l ,
(10.92)
'II",
{'II
WI
H.
:;
w..I1
1
1f
1 /'",
"1"
"'
1
1.11111
: I
:
~ ;~
1
~
'
·
"(·l'
n
,
I
,
,,
I'
!
.'í
()
186
10.
Symmetrical
Three-Phase
AC Machines
PR
__
1_
=
Wl
< 1
rJg
=
Pm
- 1 - S w
(10.93)
which means
that
the
efficiency even of
an
idealised
motor
ü;
lowered in
proportion
to
speed, whether
the
reduction in speed
is
caused by additional
rotor
resistors or by reduced
stator
voltage. A similar situation exists in
the
generation region, where
the
losses rise also with
the
magnitude
of
the slip.
With
a real motor, having
primary
copper losses as well as iron
and
friction
losses,
the
efficiency will drop below this idealised case.
(JRLa
iR
Pv
Rotor lasses
~
RR
PR
RR
~
S
Inputpower
)
, ,
1
RR(S-l)
,
,
'r'
,
~
Pm
Mech. power
Fig.
10.12.
Power balance
in
the
rotor
The
explanation is, of course,
that
the induction
motor
functions like a
mechanical clutch, where
the
product
of
speed difference and torque causes
an
unavoidable power loss.
The
definition of efficiency in the braking region
at
reverse speed, S >
I,
does
not
make sense, because electrical as well as
mechanical power is supplied
to
the
rotor
and
converted
to
heat.
With
high slip control schemes for short
duty
drives the
main
problem is
the
dissipation of
the
rotor
heat
loss.
ln
this respect a wound
rotor
motor
with
external
rotor
resistors is preferable, however
at
the
cost of moving contacts.
These results give ample evidence
that
an
efficient adjustable speed AC
drive can only be realised when either
the
slip power is recovered by some
means
or
the
stator
frequency
Wl
is changed
to
track
the
mechanical speed,
thus restricting the
rotor
frequency to small values.
10.2.3
Comparison
with
Practical
Motor
Designs
The
simplified theory of a symmetrical induction motor in steady
state
points
to
the
totalleakage
factor
(j
as
the
most inflllcntial
panl.111
ctcr of
the
machine.
As
was mentioned before,
(j
depends on thc
:-;11,,1'(:
or
til!: Klots
and
increases
with
lhe
airgap.
Tlw
se
al,'
or
til,:
cír
c
nlar
c
urwlll
lonl~;
iH
d('I,
"l'Jllill""
lIy
Uw
i(!.:a,]
Ilo
..
load
('111'1'('111, l
.,.
"
wh
i('
h
lI
hw
"",)/,11,11
-1
1.0
a la
r/
:" ,' x
!.,'
..
t
"II
1,l
tI'
II
i
1'
1',
'a
." ,
1",,1'
11I
1'
c!uwi(';d
1"
'/li,I II "
',
1,111'
I
lI
rj',
!I
'
I'
LI 1
/1,
1
'/
',"1'
wil,11
IlJlrll.
l
l",)"
/I
lr
ll
"
Í,
W
II
1',,1
1'
1II;I('I,illl':
;
(Ir
"qllit.l
'1
1'
1,(
1
10.2
Induction
Motor
in
Steady
State
187
The
scale of
the
normalised
slip/torque
curve, Fig. 10.9 b, is fixed by
the
pull-out slip
Sp
and
the
peak torque m
p
;
in
the
interest of good efficiency
in
steady
state,
Sp
should
be
as small as possible.
The
peak torque is also
affected by
the
leakage factor.
ln
Table 10.2 some
of
the
characteristic
parameters
obtained with
the
simplified model are compared
to
those of
standard
motors, as taken from
manufacturers lists on medium size
(> 100 kW)
50
Hz motors, for a two pole-
and
an
eight pole-machine.
The
comparison indicates a fairly close agreement,
at
least from
the
standpoint
of
the
user.
Table
10.2.
Comparison
of
idealised
model
with
pararneters
of
standard
motors
Model
Real
Model Rea1
for a
= 0.05, for a = 0.1,
no = 3000
l/min
no = 750
l/min
Sn
= 0.22 0.20 0.32 0.30
--s;
fo
fo
= 0.22 0.30 0.32 0.40
fs!
l-a
cos
'Pn
rra
= 0,90
0.90 0.82 0.84
mpo
1
~
= 2.35
2.30 1.82 2.0
m
n
2 a
10.2.4
Starting
of
the
Induction
Motor
When
selecting suitable values for efficiency, power factor and overload capac-
ity
at
the
nominal
operating
point,
the
starting
performance of the
motor
is
unsatisfactory; this is
apparent
from Fig. 10.13, where characteristic variables
of a
motor
with a leakage factor
(j
= 0.05 are
plotted
against normalised slip.
The
conditions for acceptable performance
at
the
nominal operating
POill(.
are:
a)
The
normalised slip
at
the
nominal operating point should be
about
Snl
Sp
~
..j(i
to
achieve a good power factor
and
adequate overload
ca
-
pacity
_
b)The
need for good efficiency
rJn
< 1 -
Sn
calls for a minimal value
of
nominal and, hence, pull-out slip.
With
motors above 100 kW, a nomill;d
slip
Sn
~
0.
02
is
realisable; the pull-out slip would
then
be
about
SI'
~
O,lO.
This llw:tns
that
an
indllctioll
motor
with a short circuited, consta.lli
f':
"
:
ii
st,
nIlC<'
rotor
wOllld llitvo to
Ht.ari
fnllll
fi
lalldstill
(8
=
1)
at
SI
Sp
~
10
whirll
c'o['n 'R!JOlldN !.o n
ll
op
e
ra.l.ill
~
:
POilll, "
,I,
1.111'
fil
J'
rll':hl,
01'
!.h,
~
circula,!'
dia
,
/
~
nulI
,
I"i/',.
I O
.H.
'1'
1(('
ill
,lIr
l.ill/
\ 11I'1'f'mfll ll llc'l'
;11
, S I ,
"!a
nrll l'I,(', j
!1
c·t1
"y
188
10.
Symmetrical Three-Phase
AC
Machines
IS
mM
COS
<{>
'm
n I
Sn
IS
4
COS
<{>n
R==O
0=
0,05
3
Snc
-==-'0=
0224
S '
p
m
n
~
l-O
COS
<(>n
=~
==
0,9
2
",
I
Sr
,
,
,
Nominal
operating
point
,
'........
mM
........
........
---_'!!.n_
S
, 0,5
2 3 4
5
Yci
Sp
Fig.
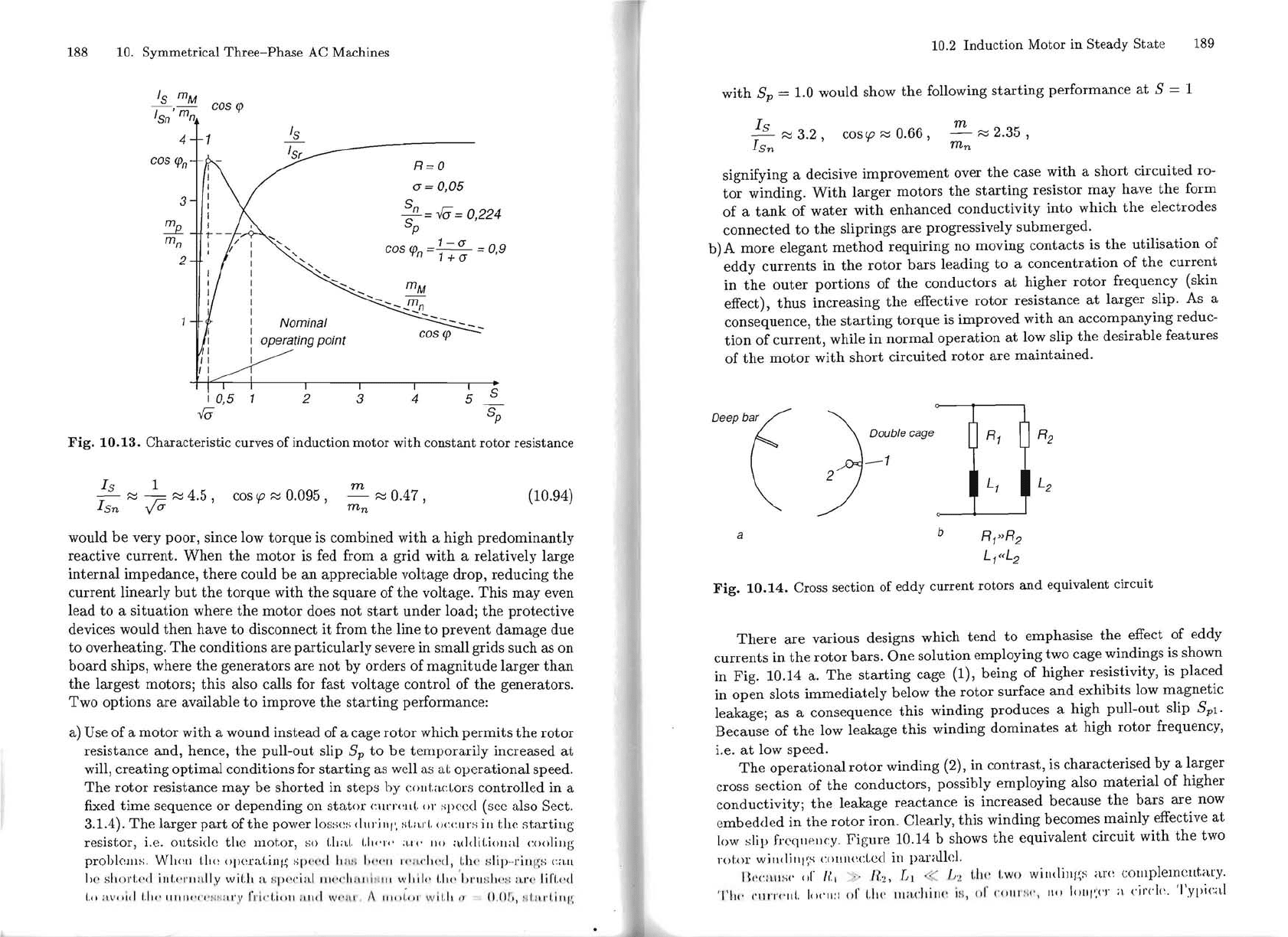
10.13.
Characteristic curves of induction motor with constant rotor resistance
Is 1
I
~
-lU
~
4.5 , cos
cp
~
0.095 ,
~
~
0.47,
(10.94)
Sn
m
n
would
be
very poor, since low
torque
is combined with a high
predominantly
reactive current.
When
the
motor
is fed from a grid
with
a relatively large
internal
impedance,
there
could
be
an
appreciable volt age drop, reducing
the
current
linearly
but
the
torque
with
the
square
of
the
voltage. This
may
even
lead
to
a
situation
where
the
motor
does
not
start
under
loadj
the
protective
devices would
then
have
to
disconnect
it
from
the
line
to
prevent
damage
due
to
overheating.
The
conditions
are
particularly
severe in small grids such as
on
board
ships, where
the
generators are
not
by orders
of
magnitude
larger
than
the
largest motorsj this also calls for fast volt age control
of
the
generators.
Two
options are available
to
improve
the
starting
performance:
a) Use
of
a
motor
with
a wound
instead
of a cage
rotor
which
permits
the
rotor
resistance and, hence,
the
pull-out slip
Bp
to
be
temporarily
increased
at
will,
creating
optimal
conditions for
starting
as well as
aI;
operational
speed.
The
rotor
resistance
may
be
shorted in steps
by
COllt.a.ctors
controlled
in
a
fixed
time
sequence
or
depending on
stator
CHr)'(!Il(.
01'
spced
(sec also Sect.
3.1.4).
The
larger
part
ofthe
power losses dmil'l'.
st.il.l't.
o<:(',llrs
ill
Lhe
startiug
resistor, i.e. outside
the
motor,
so
UlilJ
1.11<'1'1'
;1,1\'
110
addit.iollal coolillg
problC:lll~;,
Wll(~u
t.\l(~
operat.iIlI~
s(
)('('
d
11
11:1
("
'V
II
1'
(·
n.
cll('d,
i,ll(' slip-rin
l(S
call
1>
c
s!lol'l,,'d
illt.l'I'l
lII.
lly
wit.h
ii
~
(I('('i
ll.
l
1111
'1' 1
11
11 11
11
1
11
wl
li
ll'
t.l1(,'IH'II
:d
ll': i
11.1'
11
lil'l,('"
1.(,
!-tv
" i
,1
LI,, ·,
1I1111<
1I'
('
WII
II'y fl'lt- Ll
oll
(
lI
,,1 W(' 1'.I .
fi.
1""1.
, ,,·
wl
l.
"
/I
o,
()
r" II I.It l'
l.
I
"I
"
10.2
Induction Motor in Steady State
189
with
Bp
= 1.0 would show
the
following
starting
performance
at
B = 1
Is
-I
~
3.2,
coscp
~
0.66,
~
~
2.35,
Sn
m
n
signifying a decisive improvement over
the
case
with
a
short
circuited ro-
tor
winding.
With
larger
motors
the
starting
resistor
may
have
the
form
of
a
tank
of
water
with
enhanced
conductivity
into
which
the
electrodes
connected
to
the
sliprings
are
progressively submerged.
b) A
more
elegant
method
requiring no moving
contacts
is
the
utilisation
of
eddy
currents
in
the
rotor
bars
leading
to
a
concentration
of
the
current
in
the
outer
portions
of
the
conductors
at
higher
rotor
frequency (skin
effect),
thus
increasing
the
effective
rotor
resistance
at
larger slip. As a
consequence,
the
starting
torque
is improved
with
an
accompanying reduc-
tion
of
current,
while
in
normal
operation
at
low slip
the
desirable features
of
the
motor
with
short
circuited
rotor
are
maintained.
Double cage
R
2
-1
L
2
b
R
I
"R
2
a
L
I
"L
2
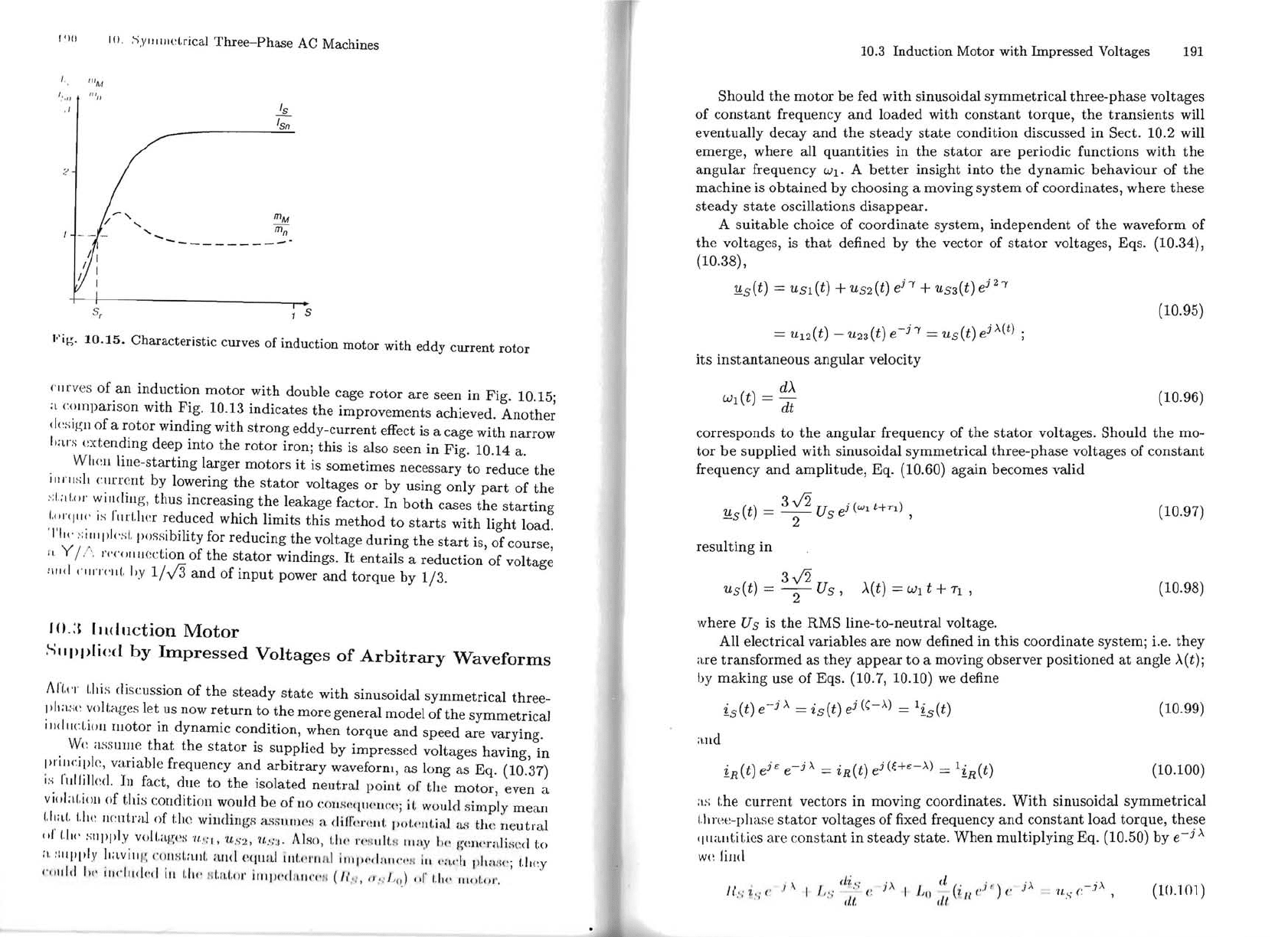
Fig.
10.14.
Cross section of eddy current rotors and equivalent circuit
There
are
various designs which
tend
to
emphasise
the
effect
of
eddy
currents
in
the
rotor
bars.
Qne
solution employing two cage windings is shown
in
Fig. 10.14 a.
The
starting
cage (1), being
of
higher resistivity, is placed
in
open
slots
immediately
below
the
rotor
surface
and
exhibits low
magnetic
leakage; as a consequence
this
winding produces a high pull-out slip
BpI.
Because of
the
low leakage
this
winding
dominates
at
high
rotor
frequency,
i.e.
at
low speed.
The
operational
rotor
winding (2),
in
contrast,
is characterised by a larger
cross section
of
the
conductors, possibly employing also
material
of
higher
conductivitYj
the
leakage reactance is increased because
the
bars
are
now
embedded
in
the
rotor
iron. Clearly, this winding becomes
mainly
effective
at
low slip
fre(]IlPIlcy,
Figure
10.14 b shows
the
equivalent circuit
with
the
two
rotor
Willdilli\S COllIH',c[,cd in parallcl.
1\';<:;1.11:';1'
01'
II"
n~,
DI
~
L~
1.111'
I.wo
willdiJlgs
ar<~
cOlllplemclLtary.
'1'11('
('tlnl·1I1.
1",'11::
,,(' !.II('
1IIi1
,dlilll: iH,
"r
,'
111
II
'
:!
" , II<'
1011/':('1'
;1.
('irdc,
'I'ypic<t.\
---------
1'111
III.
,"iY"lIlldrical
Three-Phase
AC Machines
I,.
111
M
/
11111
,'.
11
..
, /
~
'Sn
?
mM
m
n
Sr
1 S
Jo'i(.;.
10.15.
Characteristic
curves
or
induction
motor
with
eddy
current
rotor
('llrves
of
an
induction
motor
with
double cage
rotor
are
seen in Fig. 10.15;
;\
wmparison
with Fig. 10.13 indicates
the
improvements achieved.
Another
d(~si~1I
of
a
rotor
winding with
strong
eddy-current effect is a cage
with
narrow
I)ar,~
extending deep into
the
rotor
iron; this is also seen in Fig. 10.14 a.
WIt(~n
line-starting larger motors
it
is sometimes necessary
to
redu
ce
the
ílllllSIt
ClllTCnt
by lowering
the
stator
voltages
or
by using only
part
of
the
,·;L:!i.(I/, willdillg, thus increasing
the
leakage factor.
ln
both
cases
the
starting
(,(lrqll('
is
fllrLllCr
reduced which limits this
method
to
starts
with light load.
'I 'II\' ,;i"'lll('sl. possibility for reducing the voltage
during
the
start
is,
of
course,
" y
1/
',
1'I
'(
'(lIIIJ{:ction
of
the
stator
windings.
It
entails a reduction
of
voltage
1\11<1
"111'1('11(
,
hy
1/../3
and
of
input
power
and
torque
by
1/3.
'(I.;,
IHd
Ilction
Motor
SlIpplied
by
Impressed
Voltages
of
Arbitrary
Waveforms
Arl.,'!'
I.his
discussion
of
the
steady
state
with sinusoidal symmetrical three-
phasc
voltages let us now
return
to
the
more general model of
the
symmetrical
i
11<1
Ilcl.iol1
motor
in dynamic condition, when torque
and
speed are varying.
Wc
assume
that
the
stator
is
supplied by impressed volt ages having, in
prill('iplc:, variable frequency
and
arbitrary
waveforlll, as long as Eq. (10.37)
is
rlllfillNI.
lu
fact, due to
the
isolated
neutral
point
o[
the motor, even a
viobl.ioll
of
thi::;
eondition would
be
of
110
COllS(:qll('l1n:;
iI.
would simply mean
I.ha!'
I.he
llel1tral
of
t:he
WilldillgH aSSlIm(
',';
a
dilf(:n:lIt
pol.(
'lllial
aoS
the
neutral
"r
1.11('
slIpply
vol(,ap;<'s
'
/1',
'
:1,
'/},:;2, '1/.,'::1' A
lHO,
til('
H'
H
IlI!,
!!
IlIlly
III'
g'(:n('raliscd to
rI.
lill/,/,Iy
h;wjl'l
~
('()II~I.;l.Id
,
:tlld
(:'111111
i
lll.('!'ll
ld illlj"'t!HIII'\'H iII (';LeI. pha.
;.;
(';
1.I"
:y
('
",ii.!
I
...
ill<'llI,[(',1
iII
U
..
,
,,
1.11.1."1'
illlJII'dl
u""'
1I
(1,'
,'1
,
,,
::
1,(
,)
"r
1.111'
111"1.,,1',
10.3
Induction
Motor
with
Impressed Voltages
191
Should
the
motor
be
fed
with
sinusoidal
symmetrical
three-phase voltages
of
constant
frequency
and
loaded with
constant
torque,
the
transients
will
eventually decay
and
the
steady
state
condition discussed in Seet. 10.2 will
emerge, where alI quantities in
the
stator
are periodic funetions
with
the
angular
frequency
Wl'
A
better
insight into
the
dynamic behaviour of
the
machine is
obtained
by choosing a moving system
of
coordinates, where these
steady
state
oseillations disappear.
A suitable choice of coordinate system, independent
of
the
waveform
of
the
voltages, is
that
defined by
the
vector of
stator
voltages, Eqs. (10.34),
(10.38),
j2
'Y,S(t)
= USl(t) + US2(t)
eh
+
US3(t)
e
--y
(10.95)
= UI2(t) -
U23(t)
e-h
= Us(t) e
j
À(t) ;
its
instantaneous
angular velocity
d>'
Wl(t) = dt
(10.96)
corresponds
to
the
angular frequency
of
the
stator
voltages. Should
the
mo-
tor
be
supplied with sinusoidal symmetrical three-phase voltages of
constant
frequency
and
amplitude, Eq. (10.60) again becomes yalid
'Y,S
(t) = 3 y'2 U S e
j
(Wl
t+Tl)
(10.97)
2 '
resulting in
3y'2
us(t)
=
-2-
Us,
>.(t)
=
Wl
t +
TI
,
(10.98)
where
U
s
is
the
RMS line-to-neutral voltage.
All electrical variables are now defined in this coordinate system; i.e.
they
are transformed as
they
appear
to
a moving observer positioned
at
angle
>.(t);
by
making
use
of
Eqs. (10,7, 10.10)
we
define
is(t)
e-j
À =
is(t)
e
j
(-À)
=
lis(t)
(10.99)
;l.Ild
iR(t) e
j
ê
e-
jÀ
= iR(t) e
j
(e+ê-À)
=
li
R
(t)
(10.100)
as
the
current vectors in moving coordinates.
With
sinusoidal symmetrical
I.hree-phase
stator
voltages
of
fixed frequency
and
constant
load torque, these
qll<1l1ti
(,ies are constant in
steady
state,
When
multiplying Eq. (10.50) by
e-
j À
w(~
JiJld
, \
Ih
-;
"À
d(
",
'
,\
/(,
"
1"
. 1'
.1
I {
",.
.
t:
J
1/'(1
1./
1
1'.1
)1
' J
'Il.
s
r-·
i
>--
(10,101 )
",
'
.II.
III
192
10. Symmetrical
Three-Phase
AC Machines
which is transformed by
substituting
l
d
is
d(.
_j>..)
di
s
_
jÀ
.d>'.
-jÀ
--=-zse
=-e
-J-zse
dt
dt
- dt
dt
-
(10.102)
Developing
the
expression
d
·
dI'
is
-jÀ
iS
+.
1.
-e
=--
JW1
Zs
dt dt -
(10.103)
correspondingly,
. 'ê) d
1
i.
1.
d(lR
e)
-jÀ
=
---=!},
+ J
W1
iR,
--e
dt
dt
(10.104)
and
inserting Eqs. (10.103), (10.104) into Eq. (10.101),
the
stator
voltage
equation
in
the
moving reference frame results,
d
Rs
1is +
dt
(Ls
1is +
Lo
1i
R
)
+ i
W1
(Ls 1is +
Lo
1i
R
)
=
us(t)
.
(10.105)
The
rotor
equation Eq.(10.51) is transformed accordingly, with
Y.R(t)
==
O,
RR
1i
R
+
~
(L
R
1i
R
+
Lo
1is) + j
(W1
-
w)
(L
R
1
iR
+
Lo
1is) =
O.
(10.106)
These equations may be simplified by
substituting
the
flux vectors, defined
in Eqs. (10.25), (10.32) which are also transformed into moving coordinates,
1.
/.
./.
-j
À
LI'
LI'
'f..s = 'f..s e = s
is
+ o
iR,
(10.107)
1.
/. =
./.
e
j
(ê-À)
= LR
li
+ L
li
.
'f..R
!:f.R
-R
o_s
(10.108)
Hence
the
current vectors are
1·
_
(1./.
1
1./.)
1
zs---
'I-'
---
'I-'
-
(7
Ls
-s
1 +
(7R
-R
(10.109)
1·
_
(1./.
1
1./
.)1
ZR-
--
'I-'
---
'I-'
-
(7
L
R
-R
1 +
(7s
-s
(10.110)
Inserting Eqs. (10.107-10.110) into Eqs. (10.105, 10.106) results in
d
1./.
T
'
1:...s
[1
+ J
.
W1
T
'J
1./.
- -
1
o
1
4)
I
1"
..
.<;
Us
t s
-d
- + S
'l-'s
- =
()
,
t -
l+(7R
- I.
(10.111)
111.4)
J
T/~
lU
-H
-I-
rI
I· j
(WI
-
w)
TRJ
''1/'/1
0.,
(10.112)
I .1
(f
;
,'
'1/'
"
W
1",\"
,
10.3
Induction
Motor
with
Impressed Voltages 193
(7
Ls
(7
LR
(10.113)
T~
=
Rs
'
T~=
RR
are
transient
time
constants.
The
expression for
the
electrical torque, Eq. 10.48, can be
written
in
the
form
mM
(t) =
~
Lo
1m
[is (iR e
j
ê)*]
=
~
Lo
1m
[lis
ei
R
)*]
(10.114)
the
torque
is independent of
the
coordinate system because
the
inverse
trans-
formations
with
e
jÀ
are cancelling. Hence, using Eqs. (10.109, 10.110)
we
have
mM
(
t)
= -
2
Lo
1m
[(1
7jJ
-
--
1 1 )
7jJ
(1
7jJ
-
--
1 1 )
7jJ
* J
.
3
(72
Ls L R
-s
1 +
(7
R
-R
-R
1 +
(7
S
-s
(10.115)
Since only
the
mixed
terms
of
the
product
contribute
to
the
imaginary
part,
this
reduces
to
mM(t) =
~
Lo
1m
[17jJ
17jJ*
+ 1
17jJ
17jJ*
J
3
(72
Ls
L
R
-S
-R
(1
+ (7s)(l +
(7R)
-R
-S
=
~
1 -
(7
~
1m
[17jJ
17jJ*]
. (10.116)
3
(7
Lo
-s
-R
This
is inserted into Eqs. (10.52, 10.53) for
the
mechanical motion.
To arrive
at
dimensionless real equations,
the
transformed flux vectors
are
nOw
normalised and splít in real
and
imaginary
parts,
representing
the
components
that
are parallel (x)
and
orthogonal
(y)
to
the
voltage vector.
The
flux linkages in steady
state
operation
with
sinusoidal voltages
and
nominal
frequency, as indicated on
the
nameplate,
and
neglected
stator
resistance
serve as flux references,
(t)
-2-
3
.12
Uso
[xs(t) + j ys(t)]
(10.117)
17jJ
-s
=
Wo
,
3
.12
Uso
[XR(t)
+ j YR(t)] .
17jJ
-R
(t) = 2
Wo
(10.111'\)
Tlle
magnitude
of
the
voltage vector in Eq. (10.98) is also referred to
I,IH
'
Illagnitude
at
nominal
operating
conditions,
3.12
Us(t)
(10.] I!))
'Ils(t)
=
-2-
Uso Uso
.
II.
is llutccl
that
no restrictions with regard
to
waveform or frequency
of
t.hc
:i/,;II,()I' voH'lgcs lmve been imposed so far.
WiI
.h
1.11('1:('
ddillitiollS
thr
V()Jl.al~('
(~q1\atiolls
(10.111, 10.112)
and
thc e.' ·
pr":i
r:
i"ll
rOl'
LIli'
I,
")'qll('
1-;'1'
(IO.llli)
:1.':: :11111<'
1.11(~
r()llowillf~
fonn
I
!11
10.
Symmetrical
Three-Phase
AC Machines
1'8
~
(xs
+
jys)+
[1
+
jWl
T;J
(xs
+
jys)
1 (
')
I Us
-
-1--
XR
+J
YR
=
Wo
T
s
-U
'
(10.120)
+
(TR
50
T
R
~
(XR
+
jYR)+
[1
+j
(Wl
- w)TRJ
(XR
+
jYR)
1 .
-
-1--
(xs
+J
YS)
=O ,
(10.121)
+
(TS
mM
=2
(1
+ (Ts)mpo
(Ys
XR
- XSYR) ,
(10.122)
wltcre
mpo
is
the
nominal
peak
torque for
Rs
=
O,
as defined in Eq. (10.86).
With
the
following abbreviations for
Pull-out
slip
at
nominal
frequency
and
Rs
= O
RR
SpR
=
Wo
(T
L R =
1
Wo
T R '
(10.123)
Pull-out
slip
of
rotor-fed
motor, nominal frequency
Rs
1
and
RR = O
(10.124)
Sps =
Wo(T
Ls
=
woT;
,
M
(~chanical
time
constant
T _ Jwo
m - -
(10.125)
mpo
:
1.11<1
lhe
instantaneous normalised frequencies
"t.at.or frequency
Wl
Wo
lIlecltanical
rotational
r['(~qll
e
Ilcy
(speed)
W
Wo
I'U
lor
frcq
U(~llcy
(,);\ W I W
(IO.1
2
Ci)
(,)
0 (.II
I!
10.3
Induction
Motor
with
Impressed
Voltages
195
six real differential equations emerge for
the
direct
and
quadrature
flux com-
ponents as well as
motor
speed
and
positionj
eo
is
an
arbitrary
angle
of
reference.
,
dxs
1
Wl
1 1 Us(t)
T
s
--
=
-Xs
+ -
-Ys
+
---XR
+
---
(10.127)
dt Sps
Wo
1 +
(TR
Sps
Uso
, dys 1
Wl
1
T
s
- =
--
-
Xs
- Ys +
---
YR,
(10.128)
dt Sps
Wo
1 +
(TR
,
dXR
1 1
W2
T
R
--
=
---Xs
-
XR
+
--
-YR,
(10.129)
dt 1 +
(T
5
SpR
Wo
,
dYR
1 1
W2
T
R
--
=
---Ys
-
--
-XR
-YR,
(10.130)
dt 1 +
(TS
SpR
Wo
d
C~o)
T
m
= 2
(1
+(Ts)(Ys
XR
-
Xs
YR)
- -
mL
(w,
c, t) ,
(10.131)
.
mpo
eo
d
(eco)
W
(10.132)
Wo
dt
Wo
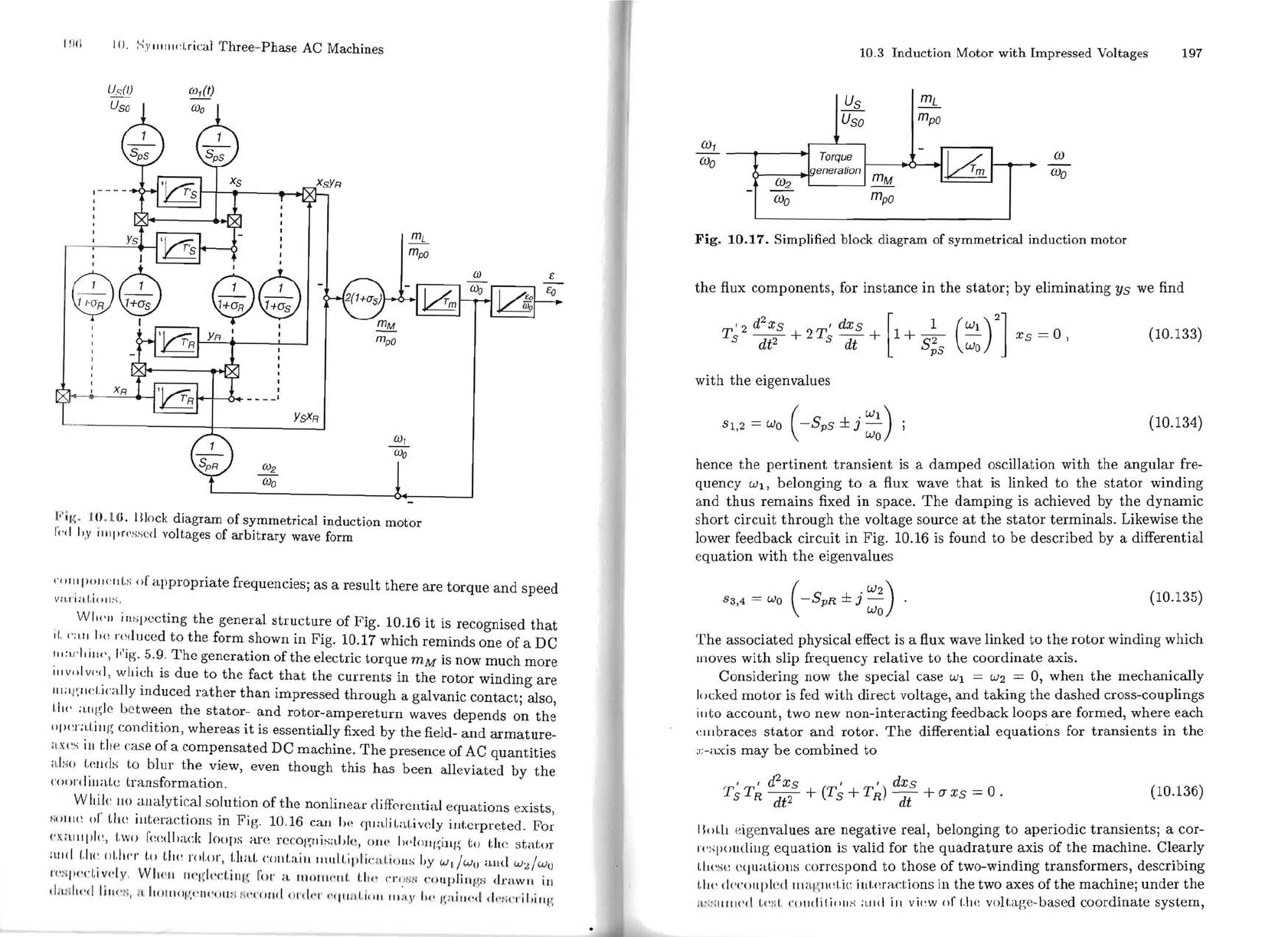
These equations
may
be represented in graphical form by
the
block dia-
gram
in Fig. 10.16, where
the
integrators
with feedback are redrawn
to
form
unity
gain lag elements. Due
to
the
rotational
symmetry
of
the
machine
the
angles
e(t),
À(t) do
not
enter
the
right
hand
side
of
the
model equations Eqs.
(10.127-10.131) with
the
exception
of
load
torque
mL
that
may
depend
on
the
mechanical angle.
The
block
diagram
describes
the
dynamic behaviour
of
the
symmetrical
motor,
fed by impressed
stator
volt ages independent
of
waveformj
the
mag-
nitude
us(t)
of
the
volt age vector is given by Eq. (10.119),
its
instantaneous
angular
frequency
wdt)
by Eq. (10.96).
As
special case with Us
=const.,
Wl
= dÀ/dt = const.,
the
transient
condition
of
the
motor
operating
on
the
symmetrical
three-phase supply results, where U5 is
the
RMS value of
the
line- to-
neutral
volt ages.
Because of
the
transformatíon
into
the
voltage based coordinate system
moving
with
stator
frequency,
the
steady
state
values
of
the
flux components
and
speed, assuming
constant
load torque, are
constant
.
The
steady
state
values are derived by
setting
the
derivatives in Eqs. (10.127-10.131) equal
to
zero;
the
resulting system
of
algebraic equations is equivalent
to
the
results
obtained
in Sect. 10.2.
Of
course, under dynamic conditíons
the
Hux
components are
no
longer
CO!l:;tant beeause
there
may
be
transient
flux waves which are linked
to
the
Hlator
01'
rotor
windings and, hence, move with
the
angular velo city
Wl
or
L,)~
«.I
I
é.)
rdat.ive
to
lhe
c()ordjnat.(~
s'ys
t.<!IJl,
whcre
the.Y
appea.r as
AC
11
1I
II).
:
~
yllllll(
,
Lrical
Three-Phase
AC Machines
l1.
, {I)
OJdt)
USO
XSYR
I--=,
I+-t---ó+ - - - - I
YSXR
OJ2
Wõ
mM
m
po
.!!!.b...
mpO
.!:!!....
OJo
"'
i
,
~.
I O.
LO
. lllock diagram
of
symmetrical
induction
motor
r.."
h
.v
illq .r<'
.'i.'i
ed
volt ages
of
arbitrary
wave form
t.
111111<
.J1CIII.
S
OL
'Lppropriate frequencies; as a result there
are
torque
and
speed
Vi
l.!
iill.ioll
S.
WII( '
JI
ill
.'i
pc
cting
the
general
structure
of
Fig. 10.16
it
is recognised
that
i
I.
(
':
UI
I>(
!
I"(
!
<iuc
ed to
the
form shown in Fig. 10.17 which reminds one
of
a DC
"':i.("!t
i
ll("
I"ig
. 5.9.
The
generation
of
the
electric
torque
mM
is now much more
illvolved, which is
due
to
the
fact
that
the
currents
in
the
rotor winding
are
"I:lglld.ically induced
rather
than
impressed
through
a galvanic contact; also,
1.11('
all[.';Jc between
the
stator-
and
rotor-ampereturn
waves depends on
the
op(!lal.illg condition, whereas
it
is essentially fixed by
the
field-
and
armature-
i i
,
(
~S
iII
the case of a
compensated
DC machine.
The
presence
of
AC
quantities
;
t./
:;
o
1.(
~
11(1s
to blur
the
view, even though
this
has been alle
viated
by
the
( ' (
I(
H'(
I
ill
a
Le
transformation.
Wh
iII!
110
<Lllal
ytical solution
of
the
nonlinear
clifr
crential equations exists,
I
;OIlI(~
01'
t/w
illteraetions
in
Fig. 10.16 can
1)('
<]lIalil.al
.iveIy illt.crpreted. For
nalll"I('
, I.W()
r(~r:dllad(
loops
ar
e
rcco
!',
lIis;dlJe,
011('
IlI'!ollgiug
to the s
tator
i!.lld
I.lI e
ol.lll'J"
1.0
I.JI(~
rol
.
or,
Lha.!.
cOlIl.ail.l
IIl1dl,il'li
cnl.i
ulIs
11'y
WI
J/ WO
alld
w
~/w
()
J"(
·
Y;
I'
('('l.ivd
)'
,
1,-\1111
'
11
1U'1':I,'diIlI
C(
li
o!"
n
HIOII
IV
III.
1.11
1"
<'1'
1111
1;
(
'
ollpliIlI
~S
drawlI
iII
dllf
dll'(!lill,
oll
,
II
h<lllllll
'·
,<'
II4"HI
!I
/'l
1'
·"('lI.d u r
dI.'!
\'q
Ill!I U '11!
111
1'
)1
I
I('
l
',nin(',1
d(
'ri(' 1 il.iIlI'.
10.3
lnduction
Motor
with
Impressed Voltages
197
.!:!.§...
I
mL
Uso
mpo
Oh
úJo
úJ
úJo
mpo
Fig.
10.17.
Simplified block
diagram
of
symmetrical
induction
motor
the
fiux components, for
instance
in
the
statori
by
eliminating
Ys
we find
, 2 d
Xs
'
dxs
1
Wl
2
[(
)
2]
(10.133)
T
s
di2
+ 2 T
s
dt
+ 1 +
S;s
Wo x S =O ,
with
the
eigenvalues
.Wl)
81,2
= Wo
(
-Sps
± J Wo
(10.134)
hence
the
pertinent
transient
is a
damped
oscillation with
the
angular
fre-
quency
Wl,
belonging
to
a fiux wave
that
is linked
to
the
stator
winding
and
thus
remains
fixed
in
space.
The
damping
is achieved by
the
dynamic
short
circuit
through
the
volt age source
at
the
stator
terminals. Likewise
the
lower feedback circuit in Fig. 10.16 is found to
be
described by a differential
e
quation
with
the
eigenvalues
.
W2)
(10.135)
83,4
= Wo
(
-SpR
± J Wo
The
associated physical effect is a flux wave linked to
the
rotor
winding which
moves with slip frequency relative to
the
coordinate
axis.
Considering now
the
special case
Wl
=
W2
=
O,
when
the
mechanically
locked
motor
is fed
with
direct voltage,
and
taking
the
dashed cross-couplings
iI/to account, two new
non-interacting
feedback loops
are
formed, where each
(~lHbrace
s
stator
and
rotor.
The
differential
equations
for
transients
in
the
:,:-axis
may
be
combined to
,
,d?-xs
'
,dxs
TsT
R
-2-
+ (T
s
+T
R
) -
+axs
= O.
(10.136)
dt
dt
!10th
(
·
~
i
g
envalues
are
negative real, belonging
to
aperiodic transientsi a cor-
IT
:';
POlldiug
equation
is valid for
the
quadrature
axis of
the
machine. Clearly
I.II1'S(: ('qllal.iolls eo
rrespond
to
those of two-winding transformers, describing
I.I/\'
d
l'
(,()l/l'bll"
ilW
\(
~
l.ic
illl.(~rad
:
ions
in
the
two axes
ofthe
machinei
under
the
,dn
l/lIlI't!
1,
('
1:
1,
('
llIlIlil.i"IIH
;1.11.1
ill
vil:w
or I.lw
voIt.a.g
e-based coordinate system,
19i;
10.
Symmetrical
Three-Phase
AC
Machines
'm
(!o)
j1
1
(01
~
jO,5
(02
'=
0,05
'=
const
(00
'
(00
0,15
-0,1
Re
(!o)
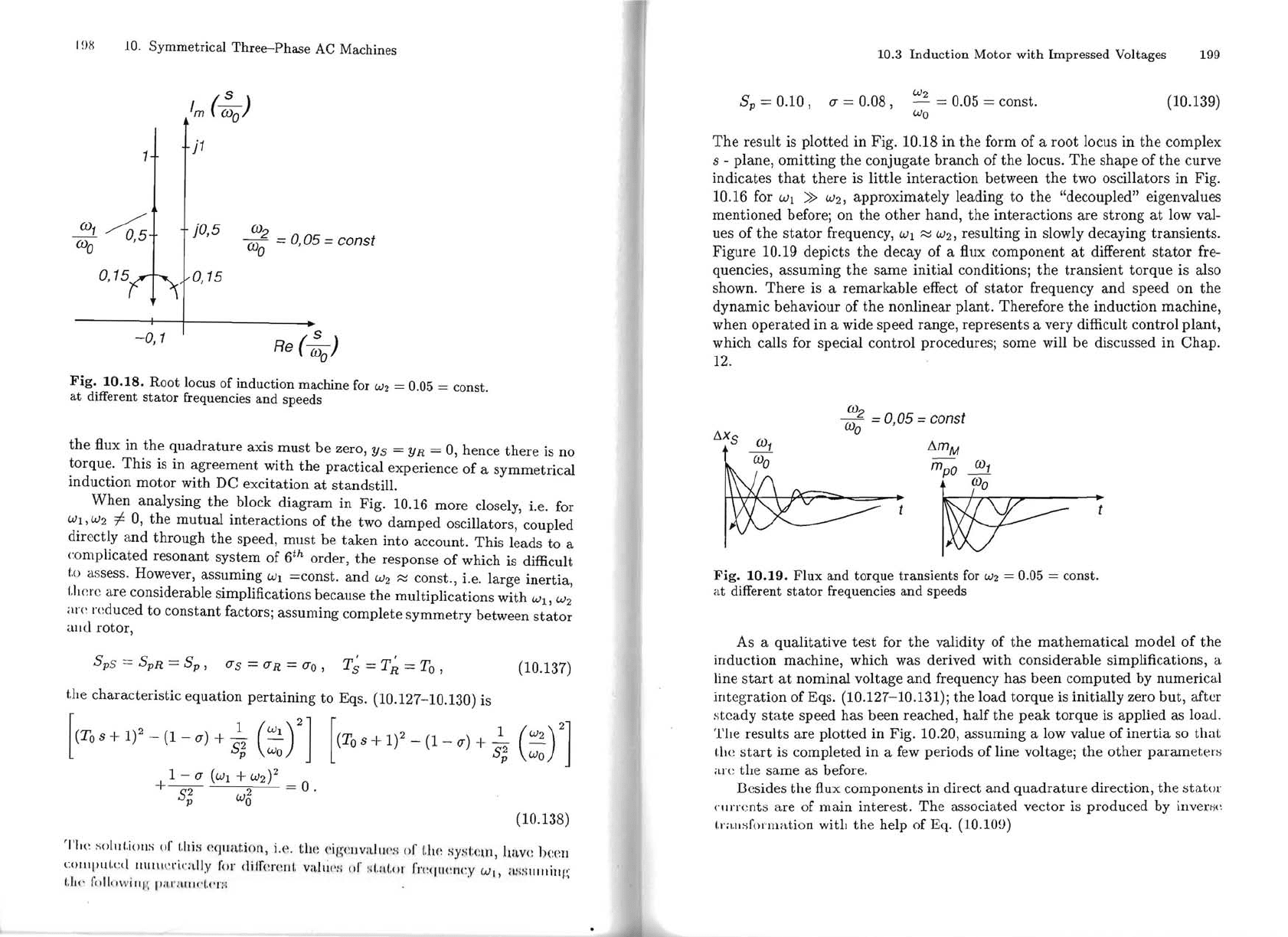
Fig.
10.18.
Root
locus
of
induction
machine for
W2
= 0.05 = consto
at
different
stator
frequencies
and
speeds
the
:/lux
in
the
quadrature
axis
must
be zero,
Ys
=
YR
=
O,
hence
there
is
no
torque.
This
is in agreement with
the
practical experience
of
a symmetrical
induction
motor
with
DC excitation
at
standstill.
When
analysing
the
block diagrarn in Fig. 10.16 more closely, i.e. for
Wl,
W2
f:.
O,
the
mutual
interactions
of
the
two
damped
oscillators, coupled
dircctly
and
through
the
speed,
must
be
taken
into account. This leads to a
complicated resonant system
of
6
th
order,
the
response
of
which is diflicult
1.0 assess. However, assuming
Wl
=const.
and
W2
~
const., i.e. large inertia,
l.hcre are considerable simplifications because
the
multiplications with
Wl,
W2
<tr<' rcduced
to
constant
factors; assuming complete
symmetry
between
stator
<tud
rotor,
5
ps
= 5
pR
=5
p
,
(J"S
=
(J"R
=
(J"o,
T;
=
T~
=
To
,
(10.137)
tbe
characteristic equation pertaining to Eqs. (10.127-10.130) is
[(To
H
1)'
-
(1-
u) +
;;
(:;)']
[(To
H
1)'
-
(1-
u)
+
;;
(::)']
1 - (J"
(Wl
+
W2)2
_ O
+ 52 2
-.
p W
o
(10.138)
Tlle
solnl.iOI\S
or
I.hi~
(~q1l'ati()n,
i.e.
th~~
('igcllvalllf's
or
(.h(~
systf:tn,
havc
heen
cOlllplll.
ed
1l1l111
\
'rir:dly
1(lr
di/fcJ"(~nl.
valtll's
or
:JI.III.()r
rn~qll(
~
l1C:y
WI,
a.:
;S
lllllill~
!.II(
' fiol[\l
wl
l'
IJ'.
1,III'
hu
lC'!..'r:·:
10.3
Induction
Motor
with
Impressed Voltages
199
5
p
=
0.10,
(J" = 0.08,
W2
= 0.05 = consto
(10.139)
Wo
The
result is
plotted
in
Fig. 10.18
in
the
form
of
a root locus
in
the
complex
s - plane,
omitting
the
conjugate branch
of
the
locus.
The
shape
of
the
curve
indicates
that
there
is
little
interaction between
the
two oscillators in Fig.
10.16 for
Wl
»
W2,
approximately leading
to
the
"decoupled" eigenvalues
mentioned before; on
the
other
hand,
the
interactions are
strong
at
low val-
ues
of
the
stator
frequency,
Wl
~
W2,
resulting
in
slowly decaying
transients.
Figure
10.19 depicts
the
decay of a
:/lux
component
at
different
stator
fre-
quencies, assuming
the
sarne
initial
conditions;
the
transient
torque
is also
shown.
There
is a remarkable effect
of
stator
frequency
and
speed
on
the
dynamic behaviour
of
the nonlinear planto Therefore
the
induction machine,
when
operated
in
a wide speed range, represents a very difficult control
plant,
which calls for special control procedures; some will
be
discussed in Chapo
12.
W
2
=0,05 =
const
W
o
tlxs
tlmM
- w
1
m~i
Fig.
10.19.
Flux
and
torque
transients
for
W2
= 0.05 = consto
at
different
stator
frequencies
and
speeds
As a
qualitative
test
for
the
validity of
the
mathematical
model
of
the
induction machine, which was derived with considerable simplifications, a
line
start
at
nominal volt age
and
frequency has been computed by numerical
intcgration
of
Eqs. (10.127-10.131);
the
load
torque
is initially zero
but,
aftcr
stcady
state
speed has been reached, half
the
peak
torque is applied as load.
Tlte results are
plotted
in Fig. 10.20, assuming a low value
of
inertia
so
that
I.!te
start
is completed in a few periods
of
line voltage;
the
other
parameter:;
are
the
sarne as before.
Besides
the
flux components in direct
and
quadrature
direction,
the
stator
Cllrrents are of
main
interest.
The
associated vector is produced by inverne
1.1':tIlSrolllliltion with
the
help
of
Eq. (10.109)