Weingast B.R., Wittman D. The Oxford Handbook of Political Economy
Подождите немного. Документ загружается.

62 rational voters and political advertising
this is an unrealistic requirement, especially in a sphere of decision-making, such as
voting, which is characterized by both free riding and complexity. Agreeing with such
an objection does not imply going back to the “black box.” A microfounded model of
campaign finance need not include full Bayesian rationality. On the contrary, it would
be interesting to develop a model of campaign finance starting from non-standard as-
sumptions on the way voters make decisions. Such model could incorporate some of
the cognitive biases that are by now well documented in the psychological literature.
A non-Bayesian microfounded model of campaign finance would still be amenable
to welfare analysis, and may provide insights that are not available with rational
voters.
References
Ansolabehere,S.,andIyengar,S.1996. Going Negative: How Political Advertisements Shrink
and Polarize the Electorate. New York: Free Press.
Ashworth,S.2006. Campaign finance and voter welfare with entrenched incumbents.
American Political Science Review, 100: 41–53.
Austen-Smith,D.1987. Interest groups, campaign contributions, and probabilistic voting.
Public Choice, 54: 123–39.
Bailey,M.2004. Can representation be fair when campaign contributions come mostly from
business? An exploration in multiple dimensions. Working paper, Georgetown University.
Coate,S.2004a. Pareto improving campaign finance policy. American Economic Review, 94:
625–55.
2004b. Political competition with campaign contributions and informative advertising.
Journal of the European Economic Association, 2: 772–804.
Gerber,A.1998. Estimating the effect of campaign spending on Senate election outcomes
using instrumental variables. American Political Science Review, 92: 401–11.
Grossman,G.M.,andHelpman,E.2001. Special Interest Politics. Cambridge, Mass.: MIT
Press.
Hertzendorf,M.N.1993. I’m not a high-quality firm but I play one on TV. RAND Journal of
Economics, 24: 236–47.
Kaid, L. L., and Holtz-Bacha.C.1995. Political Advertising in Western Democracies: Parties
and Candidates on Television. Beverly Hills, Calif.: Sage.
Kihlstrom,R.E.,andRiordan,M.H.1984. Advertising as a signal. Journal of Political
Economy, 92: 427–50.
Levitt,S.D.1994. Using repeat challengers to estimate the effect of campaign spend-
ing on election outcomes in the US House. Journal of Political Economy, 102:
777–98.
1995. Policy watch: congressional campaign finance reform. Journal of Economic Perspec-
tives, 9: 183–94.
Milgrom,P.,andRoberts,J.1986. Price and advertising signals of product quality. Journal of
Political Economy, 94: 796–821.
Morton,R.,andCameron,C.1992. Elections and the theory of campaign contributions: a
survey and critical analysis. Economics and Politics, 4: 79–108.
andrea prat 63
Potters,J.,Sloof,R.,andvan Winden,F.1997. Campaign expenditures, contributions
and direct endorsements: the strategic use of information and money to influence voter
behavior. European Journal of Political Economy, 13: 1–31.
Prat,A.2002a. Campaign advertising and voter welfare. Review of Economic Studies, 69: 997–
1017.
2002b. Campaign spending with office-seeking politicians, rational voters, and multiple
lobbies. Journal of Economic Theory, 103: 162–89.
Schultz,C.2003. Strategic campaigns and redistributive politics. Working paper, Copen-
hagen University.
Sloof,R.1999. Campaign contributions and the desirability of full disclosure laws. Economics
and Politics, 11: 83–107.
Stratmann,T.2003. Tainted money? Contribution limits and the effectiveness of campaign
spending. Working paper, George Mason University.
Vanberg,C.2004. The implications of funding asymmetries in a model of electoral competi-
tion with informative advertising and rational voting. Working paper, Cornell University.
Wittman,D.2004. Candidate quality, pressure group endorsements, and the nature of po-
litical advertising. Working paper, University of California, Santa Cruz; forthcoming in
European Journal of Political Economy.
chapter 4
..............................................................
CANDIDATE
OBJECTIVES AND
ELECTORAL
EQUILIBRIUM
..............................................................
john duggan
1 Introduction
.............................................................................
Elections, as the institution through which citizens choose their political agents,
are at the core of representative democracy, and it is therefore appropriate that they
occupy a central position in the study of democratic politics. The formal analysis of
elections traces back to the work of Hotelling (1929)andDowns(1957), who apply
mathematical methods to understand the outcomes of elections. This work, and the
literature stemming from it, has focused mainly on the positional aspects of electoral
campaigns, where we conceptualize candidates as adopting positions in a “space”
of possible policies prior to an election. In this chapter, I maintain that focus by
considering the main results for the canonical model of elections, in which candidates
adopt policy platforms simultaneously and the winner is committed to the platform
on which he or she ran. These models abstract from much of the structural detail
of elections, including primary elections, campaign finance and advertising, the role
of interest groups, etc. Nevertheless, in order to achieve a deep understanding of
elections in their full complexity, it seems we must address the equilibrium effects
of position-taking by candidates in elections.
∗
I thank David Epstein, Mark Fey, Cesar Martinelli, and Martin Osborne for helpful feedback.

john duggan 65
In this chapter, I cover known foundational results on spatial models of elections,
taking up issues of equilibrium existence, the distance (or lack thereof) between the
equilibrium policy positions of the candidates, and the characterization of equilib-
ria in terms of their social welfare properties. The chapter is structured primarily
according to assumptions on voting behavior. I first consider results for the case in
which candidates can precisely predict the behavior of voters, who are modeled in a
deterministic fashion. I refer to this as the “Downsian model.” I then consider two
models of probabilistic voting, where voting behavior cannot be precisely predicted
by the candidates and is modeled as a random variable. Within each section, I con-
sider the most common objective functions used to model the electoral incentives of
different types of candidates, including candidates who seek only to win the election,
candidates who seek to maximize their share of the vote, and candidates who seek the
best policy outcome from the election.
Of several themes in the chapter, most prominent is the difficulty in obtaining
existence of equilibrium, especially when the policy space is multidimensional. As
a point of reference for the existence issue, early articles by Debreu (1952), Fan
(1952), and Glicksberg (1952) give useful sufficient conditions for existence of equi-
libriuminthegamesweanalyze.
1
Their existence result, which we will refer to
as the “DFG theorem,” first assumes each player’s set of strategies is a subset of
n
that is non-empty, compact (so it is described by a well-defined boundary in
n
), and convex (so a player may move from one strategy toward any other with
no constraints). These regularity assumptions are easily satisfied in most models.
Second, and key to our analysis, DFG assumes that the objective function of each
player is:
r
jointly continuous in the strategies of all players (so small changes in the strate-
gies of the players lead to small changes in payoffs)
r
quasi-concave in that player’s own strategy, given any strategies for the other
players (so any move toward a better strategy increases a player’s payoff).
These continuity and convexity conditions are typically violated in electoral models.
We will see that in some cases existence of equilibrium can be obtained despite this
obstacle, but in many cases it cannot.
The well-known median voter theorem establishes that there is a unique equi-
librium in the unidimensional Downsian model, and in it both candidates locate
at the median of the voters’ ideal policies. When the policy space is multidimen-
sional, however, equilibria typically do not exist in the Downsian model. Probabilistic
voting smooths the objective functions of the candidates and is commonly thought
to mitigate the existence problem. We will give reasonable (if somewhat restrictive)
conditions under which this is true for vote-motivated candidates, but, due to non-
convexities in other models, probabilistic voting can actually introduce non-existence
of equilibrium, even in one dimension.
¹Nash1950 proves existence of mixed strategy equilibrium for finite games. Since our games involve
convex (and therefore infinite) policy spaces, his result does not apply here.

66 candidate objectives and electoral equilibrium
2 The Electoral Framework
.............................................................................
We will focus on the spatial model of politics, as elaborated by Davis, Hinich, and
Ordeshook (1970), Ordeshook (1986), and Austen-Smith and Banks (1999). Here, we
assume that the policy space X is a subset of Euclidean space of some finite dimension,
d. Thus, a policy is a vector x =(x
1
,...,x
d
), where x
k
may denote the amount
of spending on some project or a position on some issue, suitably quantified. We
assume that X is non-empty, compact, and convex. We consider an election with
just two political candidates, A and B (sometimes interpreted as parties), and we
analyze an abstract model of campaigns: we assume that the candidates simultane-
ously announce policy positions x
A
and x
B
in the space X, and we assume that the
winning candidate is committed to his or her campaign promise. Following these
announcements, a finite, odd number n of voters, denoted i =1, 2,...,n,casttheir
ballots b
i
∈{1, 0},whereb
i
= 1 denotes a vote for candidate A and b
i
=0denotes
a vote for B, the winner being the candidate with the most votes. We do not allow
abstention by voters.
To describe the various objectives attributed to candidates in the literature, let
U
A
(x
A
, x
B
, b
1
,...,b
n
) denote candidate A’s utility when the candidates take po-
sitions x
A
and x
B
and the vector of ballots is (b
1
,...,b
n
). Define the notation
U
B
(x
A
, x
B
, b
1
,...,b
n
) similarly. The first main approach to modeling candidate ob-
jectives is to view the candidates as primarily concerned with their electoral prospects.
Accordingly, our first objective function dictates that a candidate cares only about
whether he or she garners a majority of votes. In other words, only the sign, rather
than the magnitude, of the margin of victory matters.
Win motivation. The candidates receive utility equal to one from winning, zero
otherwise, so that
U
A
(x
A
, x
B
, b
1
,...,b
n
)=
1if
i
b
i
>
n
2
0if
i
b
i
<
n
2
,
with candidate B’s utility equal to one minus the above quantity.
The second objective function also captures the idea that candidates care primarily
about electoral success, but now measured in the number of votes for the candidate.
Vote motivation. The candidates’ utilities take the simple linear form
U
A
(x
A
, x
B
, b
1
,...,b
n
)=
i
b
i
,
with candidate B’s utility being n −
i
b
i
.
2
By the term office motivation, we refer to the situation in which either both can-
didates are win motivated or both are vote motivated. The second main approach to
² Note that, since we rule out abstention by voters, vote motivation is equivalent by a positive affine
transformation to plurality motivation: the margin of victory for candidate A, for example, is just
(2
b
i
) −n.

john duggan 67
modeling candidate objectives is to assume that candidates care only about the policy
outcome of the election.
Policy motivation. Assume the candidates have policy preferences represented by
strictly concave, differentiable utility functions u
A
and u
B
. In words, the graphs of
these utility functions are smooth and “dome shaped.” Under these assumptions,
each candidate has an ideal policy, which yields a strictly higher utility than all other
policies, and we denote these as
˜
x
A
and
˜
x
B
. We assume these ideal policies are distinct,
so that
˜
x
A
=
˜
x
B
. Then candidate A’s utility from policy positions x
A
and x
B
and
ballots (b
1
,...,b
n
)is
U
A
(x
A
, x
B
, b
1
,...,b
n
)=
u
A
(x
A
)if
i
b
i
>
n
2
u
A
(x
B
)if
i
b
i
<
n
2
,
and likewise for candidate B.
To model voting behavior, let P
i
(x
A
, x
B
) denote the probability that voter i
votes for candidate A, i.e. casts ballot b
i
= 1, given policy platforms x
A
and x
B
.
The probability of a vote for candidate B is then 1 − P
i
(x
A
, x
B
). This represen-
tation of voting behavior allows for voters to vote in a deterministic fashion or,
perhaps reflecting a lack of information on the candidates’ parts, in a probabilis-
tic way. Finally, let P (x
A
, x
B
) denote the probability that candidate A wins the
election, given the individual vote probabilities. Of course, B’s probability of win-
ning is one minus this amount. We assume that candidates are expected util-
ity maximizers, so that candidate A seeks to maximize E [U
A
(x
A
, x
B
, b
1
,...,b
n
)],
where the expectation is taken over vectors of ballots (b
1
,...,b
n
) with respect to
the distribution induced by the P
i
(x
A
, x
B
) probabilities, and likewise for candi-
date B. If we “integrate out” the vector of ballots, we may write expected utili-
ties as functions EU
A
(x
A
, x
B
)andEU
B
(x
A
, x
B
) of the candidates’ policy positions
alone.
Given these expected utilities, we may subject the electoral model to an equi-
librium analysis to illuminate the locational incentives of the candidates. We say a
pair (x
∗
A
, x
∗
B
) of policy platforms is an equilibrium if neither candidate can gain by
unilaterally deviating, i.e. we have
EU
A
(y, x
∗
B
) ≤ EU
A
(x
∗
A
, x
∗
B
)andEU
B
(x
∗
A
, y) ≤ EU
B
(x
∗
A
, x
∗
B
)
for all policies y.
3 The Downsian Model
.............................................................................
We now specify voting behavior, following Downs (1957) and others, by assuming
that voters vote in an essentially deterministic fashion as a function of the can-
didates’ platforms: each voter simply votes for the candidate who offers the best

68 candidate objectives and electoral equilibrium
political platform, voting in a random way (by flipping a fair coin) only when
indifferent.
Downsian model. We assume that each voter i has preferences over policies rep-
resented by a utility function u
i
satisfying strict concavity and differentiability (the
same conditions imposed on candidate utilities under policy motivation). Under
these assumptions, voter i has a unique ideal policy, denoted
˜
x
i
, which yields a strictly
higher utility than any other policy. A common special case is quadratic utility, in
which a voter cares only about the distance of a policy from his or her ideal policy,
e.g. u
i
(x)=−||x −
˜
x
i
||
2
for all x (where || · || is the usual Euclidean norm). In this
case, the voters’ indifference curves take the form of concentric circles centered at
the ideal policy. For convenience, we assume that the ideal policies of the voters are
distinct. We assume a voter votes for the candidate with the preferred policy position,
randomizing only in case of indifference, i.e.
P
i
(x
A
, x
B
)=
⎧
⎨
⎩
1ifu
i
(x
A
) > u
i
(x
B
)
0ifu
i
(x
A
) < u
i
(x
B
)
1
2
else.
This assumption may be interpreted as “sincere” voting. Assuming voting is costless,
it is consistent with elimination of weakly dominated voting strategies in the voting
game.
3.1 Office Motivation
In the Downsian model, win motivation takes the following simple form:
EU
A
(x
A
, x
B
)=
⎧
⎨
⎩
1if#{i | u
i
(x
A
) > u
i
(x
B
)} > #{i | u
i
(x
B
) > u
i
(x
A
)}
0if#{i | u
i
(x
B
) > u
i
(x
A
)} > #{i | u
i
(x
A
) > u
i
(x
B
)}
1
2
else,
and likewise for candidate B, while the alternative of vote motivation is
EU
A
(x
A
, x
B
)=#{i | u
i
(x
A
) > u
i
(x
B
)}+
1
2
#{i | u
i
(x
A
)=u
i
(x
B
)},
and likewise for B. The distinction between these two formalizations of office moti-
vation is actually irrelevant for the equilibrium analysis under deterministic voting,
and we state our results in terms of office motivation generally.
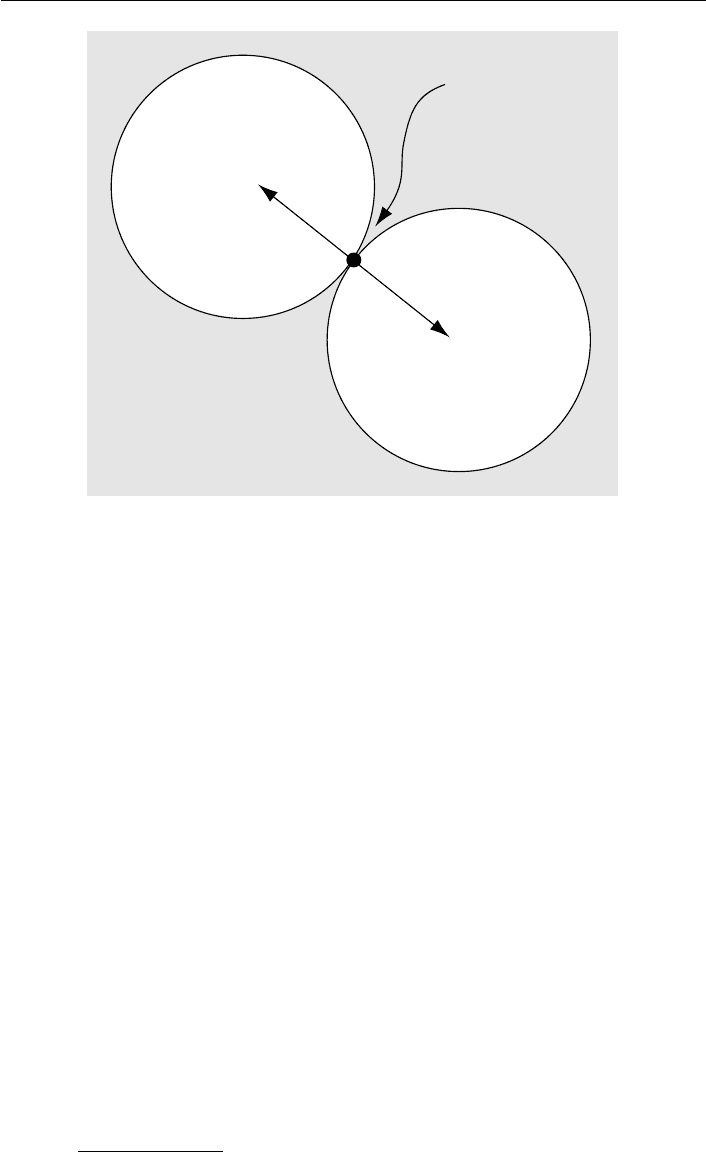
It is easy to see that both objectives are marked by discontinuities and non-
convexities, so that both of the conditions needed for the DFG theorem are violated.
For example, Figure 4.1 depicts the indifference curves of three voters through a
policy x, along with their ideal policies. If candidate B, say, locates at the policy x,
then candidate A obtains a majority of votes by locating in any of the three shaded
“leaves.” The candidate’s utility under win motivation from locating at x
is zero,
and it is one at x
. Now consider A’s utility when moving from x
directly to x
:
when the candidate enters the shaded leaf, the utility jumps up discontinuously to
john duggan 69
x'
x''
x
x
~
2
x
~
3
x
~
1
Fig. 4.1 Discontinuity and non-convexity
one (violating continuity); it then jumps back down to zero and then back up to
one (violating quasi-concavity) before reaching x
. Similar observations hold for vote
motivation.
The formal equilibrium analysis of the model relies on the concept of the
“gradient” of a voter’s utility function, the vector
∇u
i
(x)=
∂u
i
∂x
1
(x),...,
∂u
i
∂x
d
(x)
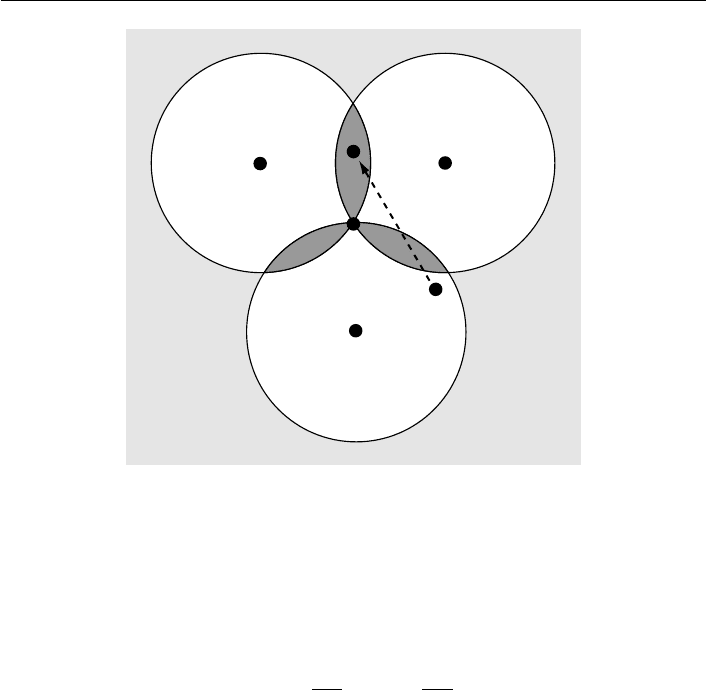
pointing in the direction of steepest ascent of the voter’s utility at a policy x.Adirect
implication of Plott’s (1967) social choice analysis of majority voting is that there is at
most one equilibrium, and that this equilibrium (if it exists) is characterized by two
conditions: both candidates locate at the ideal policy of some voter, and the gradients
of the voters at that policy must be paired in such a way that, for every voter whose
gradient points in one direction from the ideal policy, there is exactly one voter whose
gradient points in the opposite direction. The latter condition is referred to as “radial
symmetry” and is depicted in Figure 4.2,wherevoter1’s gradient is diametrically
opposed to voter 2’s.
Theorem 1: (Plott): In the Downsian model, assume office motivation. There is at
most one equilibrium. The platform pair (x
∗
A
, x
∗
B
) is an equilibrium if and only if (i)
there is a voter k such that the candidates locate at k’s ideal policy, i.e. x
∗
A
=x
∗
B
=
˜
x
k
,
and (ii) radial symmetry holds at
˜
x
k
,i.e.eachvoteri= k can be associated with a
voter j =k(ina1–1 way) so that ∇u
j
(
˜
x) points in the direction opposite ∇u
i
(
˜
x).
The most common application of the Downsian model is the unidimensional
model, where policies represent positions on a single salient issue. In this case,
70 candidate objectives and electoral equilibrium
∆
∆
u
3
(x
~
3
) = 0
u
1
(x
~
3
)
u
2
(x
~
3
)
x
~
3
∆
Fig. 4.2 Radial symmetry in equilibrium
Theorem 1 implies that there is a unique equilibrium, and in equilibrium the can-
didates both locate at the median ideal policy. Known as the “median voter theorem,”
this connection was made by Hotelling (1929) in his model of spatial competition and
by Downs (1957) in his classic analysis of elections.
Corollary 1: (Hotelling; Downs): In the Downsian model, assume X is unidimen-
sional and office motivation. There is a unique equilibrium, and in equilibrium the
candidates locate at the median ideal policy.
When the policy space is multidimensional, the necessary condition of radial
symmetry becomes extremely restrictive—so restrictive that it will be violated for
almost all specifications of voter preferences, with the implication that equilibria will
almost never exist. And if there were an equilibrium, as in Figure 4.2,thenarbitrarily
small perturbations of voter preferences could break radial symmetry, implying that
existence is a “razor’s edge” phenomenon.
3.2 Policy Motivation
The objective function representing policy motivation takes the form
EU
A
(x
A
, x
B
)=
⎧
⎪
⎨
⎪
⎩
u
A
(x
A
)if#{i | u
i
(x
A
) > u
i
(x
B
)} > #{i | u
i
(x
B
) > u
i
(x
A
)}
u
A
(x
B
)if#{i | u
i
(x
B
) > u
i
(x
A
)} > #{i | u
i
(x
A
) > u
i
(x
B
)}
u
A
(x
A
)+u
A
(x
B
)
2
else
john duggan 71
in the Downsian model. The above objective function also suffers from discontinu-
ities and non-convexities, but it differs fundamentally from the office motivation in
other ways. Nevertheless, Roemer (1994) proves a median voter theorem for policy
motivation, and Wittman (1977)andCalvert(1985) prove related results for multidi-
mensional policy spaces and Euclidean preferences that yield the median voter result
in the special case of one dimension. As with office motivation, there is a unique
equilibrium, and in equilibrium both candidates locate at the median ideal policy.
Theorem 2: (Wittman; Calvert; Roemer): In the Downsian model, assume X is
unidimensional and policy motivation. If
˜
x
A
<
˜
x
k
<
˜
x
B
, then there is a unique equi-
librium (x
∗
A
, x
∗
B
). In equilibrium, the candidates locate at the median ideal policy:
x
∗
A
=x
∗
B
=
˜
x
k
.
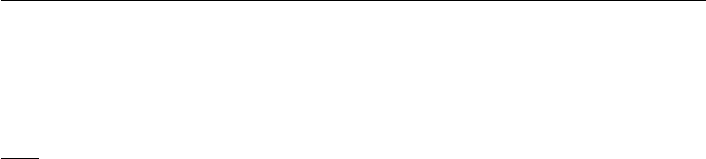
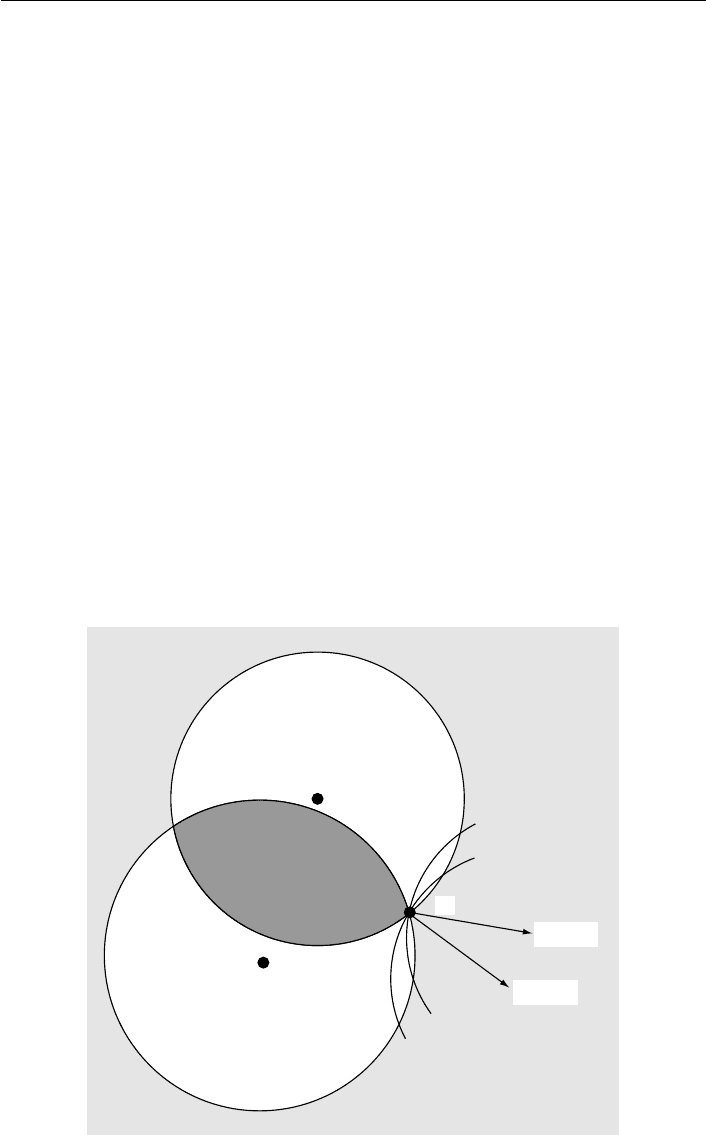
Theorem 2 leaves open the question of whether equilibria exist when the policy
space is multidimensional. Duggan and Fey (2005a) give the example depicted in Fig-
ure 4.3, where there is no equilibrium under win motivation, yet it is an equilibrium
under policy motivation for the candidates to locate at voter 3’s ideal policy: as the
candidates’ indifference curves suggest, neither can move to a position that beats
˜
x
3
in a majority vote (the shaded area in the figure) and is preferable to
˜
x
3
.Furthermore,
this equilibrium is robust to small perturbations in the preferences of voters and
candidates, suggesting more positive results on equilibrium existence under policy
motivation.
x
~
1
x
~
2
u
A
(x
~
3
)
u
A
(x
~
3
)
∆
∆
x
~
3
Fig. 4.3 Equilibrium with policy motivation but not win motivation