Water Power and Dam Construction. Issue May 2010
Подождите немного. Документ загружается.

WWW.WATERPOWERMAGAZINE.COM MAY 2010 41
UNDERWATER INSPECTION
was the rst time that image mosaic techniques have been applied for
dam inspection. This solution gives important added value since it
provides civil engineers with a global view of the inspected area.
Unfortunately, the ROV was not localised and hence the resulting
image mosaic was not geo-referenced. The lack of this information
makes it more difcult to perform periodic inspections on damaged
spots and also to locate the areas where repair works must take
place. The major contribution of the work presented in this article
consist of using an underwater robot and an USBL-based global
localisation system for building geo-referenced photo-mosaics of
selected areas of the wall or the bottom oor, opening the door to
systematic visual inspections.
HARDWARE SYSTEMS
During the AIRSUB project different hardware systems have been
developed to allow the generation of geo-referenced visual maps. The
rst is an underwater vehicle capable of executing the survey mission
and the second, an absolute positioning system capable of determin-
ing its position in world coordinates. Each one of these elements is
described below.
THE ICTINEU VEHICLE
The Ictineu vehicle [4] was conceived around a typical open frame
design as a research prototype for validating new technologies. It is a
small (0.8x0.5x0.5m) and light (60kg in air) vehicle. It is practically
neutral (approx. 0.6 Kg of positive buoyancy), it is stable in roll and
pitch due to the weights and volumes distribution, and it can be con-
trolled in surge, sway, heave and yaw with six thrusters. Four of them
are placed horizontally in a rhombus conguration that makes it pos-
sible to thrust in any horizontal direction simultaneously (surge and
sway) and perform rotation (yaw). The other two thrusters are placed
vertically and can actuate the heave degrees of freedom (DOF).
The four DOFs allow the scanning of the wall of the dam main-
taining the distance and point of view of the camera while moving
vertically and horizontally. The vehicle has two cylindrical pressure
vessels which house the power and computer modules. The power
module contains a pack of batteries and the computer module has
two industrial PCs, one for control and one for image and sonar
processing connected through a 100 Mbps Ethernet switch.
An interesting characteristic of this vehicle is that it can operate
either as an ROV (tethered mode) or as an AUV (untethered mode).
An optional umbilical cable can be connected to the two modules to
supply power and ethernet communication to the vehicle. This mode
of operation is very useful, not only to operate the Ictineu as a ROV,
but to monitor the software architecture while the vehicle is perform-
ing the dam inspection autonomously.
When working in full AUV mode, the umbilical cable is removed
and the vehicle relies on batteries to power all the systems and, there-
fore, has a limited running time but a longer range of operation.
Communication can then be established using an acoustic modem,
which is integrated in the USBL sensor. The sensors onboard the
Ictineu AUV are listed on Table 1.
USBL ABSOLUTE POSIT IONING SYSTEM
The purpose of this surface equipment is to determine the absolute
position in world coordinates of the USBL transponder mounted
on the vehicle. This information is necessary for geo-referencing the
sensor data acquired with the vehicle, as well as to reduce the drift
that inherently affects the dead-reckoning navigation estimate.
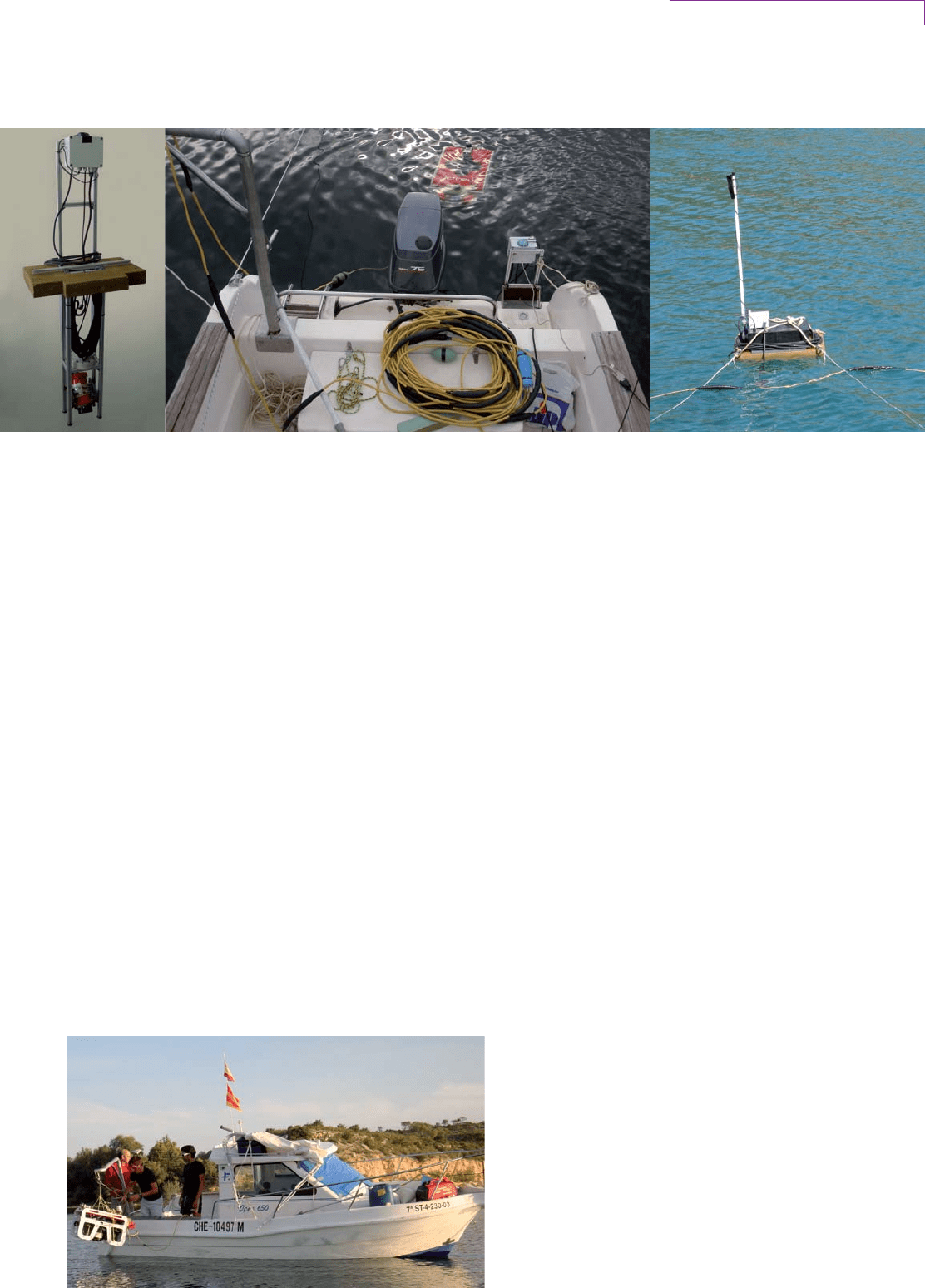
This system is basically composed of a Linkquest Tracklink 1500
USBL transceiver and its supporting sensors, a DGPS and an Xsens
MTi MRU, whose objective is to compensate the position and atti-
tude changes of the transceiver during the vehicle position estimation
process (see gure 2a). The different components are attached to an
aluminium structure which, depending on the requirements of the
mission, can be mounted outboard of a small boat (see gure 2b) or
attached to a drifting buoy (see gure 2c).
The data logging is performed on an external computer connected
to the sensors through RS232 that, if necessary, can be mounted in
the buoy and powered with batteries. In order to integrate the sensor
information acquired with the Ictineu with the position estimates
from the USBL system, the data should have a common time base.
For this reason, the computers in charge of the data logging should
be synchronised to the beginning of the mission.
SOFTWARE SYSTEMS
In this section, several software systems designed and developed in
our lab for controlling and geo-referencing the robot position, and
building visual maps, are described.
Figure 2: (a) The USBL system. (b) The system mounted outboard of a boat.
(c) The buoy with a watertight box containing a PC and batteries
Figure 3: Deployment of the Ictineu
during the Mequinenza trials
42 MAY 2010 INTERNATIONAL WATER POWER & DAM CONSTRUCTION
UNDERWATER INSPECTION
INTELLIGENT CONTROL ARCHITECTURE
Ictineu AUV is endowed with intelligent software responsible for the
navigation, guidance and control of the vehicle. The mission is pro-
grammed using mission control language (MCL), an imperative lan-
guage which compiles a Petri-net based representation of the mission
[5], useful for pre-mission verication and real-time mission execu-
tion. During the run time, the mission controller is in charge of the
sequential and/or parallel execution of tasks.
The system includes tasks for checking safety alarms, logging
sensor data, waypoint guidance, path following, sensors enabling/
disabling, keeping a relative position with respect to the wall [6],
altitude control, etc. The result of the mission execution is a set of
log les containing all the data gathered by the sensors, including the
imagery, conveniently synchronised. This data is then post-processed
to build the maps.
GEO-REFERENCING THE ROBOT POSITION
During a mission, the vehicle estimates the trajectory by means of a
stochastic sensor fusion algorithm known as the extended Kalman
lter [7]. The lter estimates the vehicle state (position, heading and
velocity) and its corresponding uncertainty following a two-step
recursive process. First, a model is used to predict the vehicle motion.
Then, this predicted state is corrected by introducing new information
provided by the sensors.
In our particular application, the velocity measurements from the
DVL, the depth calculated from the pressure sensor and the heading
provided by the bre optic gyro are used to perform the state update.
As a result of this process, a dead-reckoning estimation of the vehicle
motion is obtained. The USBL system provides absolute measure-
ments required to geo-reference the vehicle as well as to bind the error
growth in the estimated position.
To operate, the USBL system makes use of a second Kalman lter
that constantly estimates the position and altitude of the transducer
through the measurements provided by the MRU and the DGPS. When
a USBL measurement is obtained (vehicle position referenced to the
sensor frame) it is composed with the current lter estimate (absolute
position and altitude of the sensor) to produce the vehicle position ref-
erenced to the world frame. This global position is then fused ofine
with the dead-reckoning position estimate, to compute the geo-refer-
enced robot trajectory to assist the mosaic building process.
PHOTO-MOSAI CS
Photo-mosaics are built ofine by stitching together all the images
gathered during the survey and making use of the navigation data
(robot pose). The process is done automatically using software devel-
oped by our team. First of all the algorithm processes each pair of
sequential overlapping images common features. This allows compu-
tation (up to scale) of the camera motion allowing alignment of the
images forming a global visual map (of the photo-mosaic).
It is worth noting that because this is an iterative process, the small
registration errors are accumulative, provoking a drift. Whenever the
robot re-visits an already mapped area (crossover), a loop is gener-
ated. This allows a non-consecutive image registration to be used
for globally aligning the photo-mosaic through a technique known
as bundle adjustment. Finally, the mosaic alignment is improved
through several iterations of crossover detection and optimisation.
The result is a globally aligned photo-mosaic.
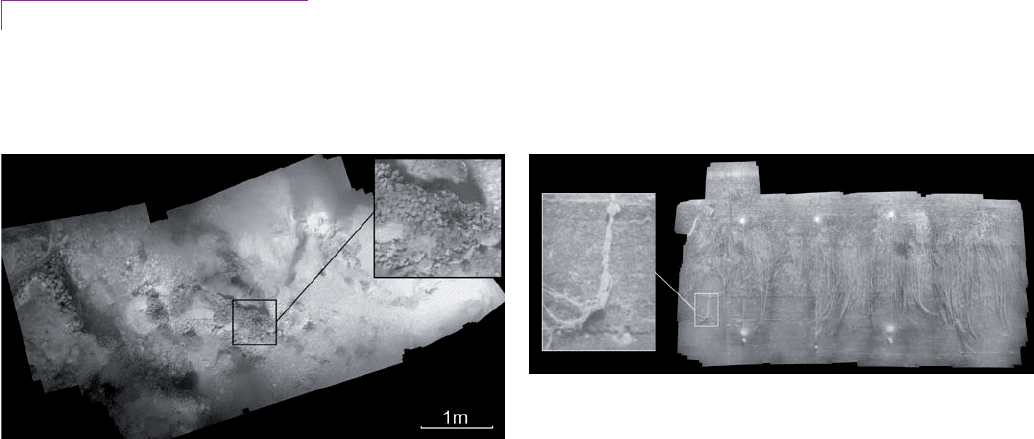
EXPERIMENTAL RESULTS
In July 2008 several experiments were carried out upstream of the
Mequinenza dam on the Ebro river in Spain. This was part of a collab-
oration project with Ecohydros, a Spanish company that offers aquatic
ecosystems consulting services. The purpose of the experiments was to
produce several geo-referenced photo-mosaics of the bottom. This was
to provide visual validation for a sonar-based system being developed
by the company to detect zebra mussel colonies.
During the test trials, the Ictineu vehicle together with the USBL
system was mounted outboard of a boat and performed small sur-
veys in some areas of interest. The water turbidity forced navigation
close to the bottom to ensure sufcient image quality. This made it
difcult to control the vehicle and reduced the performance of the
DVL measurements (our device is unable to provide reliable velocity
estimates under 1m altitude). Moreover, the harsh environment, with
big slopes and large rocks, made the autonomous operation of the
vehicle impossible. For this reason, the Ictineu was set to ROV mode
and operated from the boat with the help of the real time feedback
from the imaging sonar, the vehicle cameras and the position estimate
from the USBL.
The results of the different dives were irregular. The unreliable DVL
data and the multipath affecting the USBL measurements made it dif-
cult to obtain a good position estimate. The quality of the captured
images was also irregular. It was necessary to perform manoeuvres
to avoid hitting large rocks present on the scenario and as a conse-
quence, the camera suffered abrupt changes in the altitude, sometimes
losing sight of the bottom because of the turbid waters. However,
despite all the commented issues, it was still possible to generate some
photo-mosaics of sufcient quality.
EXPERIMENTS AT THE PASTERAL DAM
The purpose of this test was to demonstrate the capacity of the system to
execute an inspection of a dam wall to search for cracks or other dam-
ages on the concrete. Nowadays, professional divers perform this task,
but they offer only a limited view of the submerged structure, which
makes it difcult to clearly determine the position of the defects.
The proposed method overcomes this problem by generating a geo-
referenced mosaic from which a technician can easily determine the
exact location of the spot of interest. Moreover, the fact that the under-
water vehicle can execute this task autonomously makes it possible to
increase the frequency of the inspections.
During the tests carried out in February 2009 at the Pasteral Dam
(Ter river, Spain) the Ictineu executed autonomously a survey trajec-
tory covering a rectangular area of approximately 4x10m with the
forward looking camera. The USBL system was placed on a buoy and
Figure 4 – One of the mosaics produced during the Mequinenza trials.
A mussel colony can be observed at the center of the image
Figure 5 – Mosaic of a wall in the Pasteral hydroelectric dam
WWW.WATERPOWERMAGAZINE.COM MAY 2010 43
UNDERWATER INSPECTION
anchored in front of the dam with the transducer oriented to the wall.
With this same setup it is possible to cover larger areas. Actually, the
same image processing technology has been successfully applied for
building a photo-mosaic of 20000 images of the Mid Atlantic Ridge
[8], in this case gathered from an Oceanographic ROV.
However, during the trials the hydroelectric dam was operational
and the test area was limited for safety purposes. In the resulting
photomosaic it is possible to observe the concrete texture as well as
the algae adhered to it. Six reective elements were placed at known
distances as a form of validating that the resulting mosaic dimensions
were adequate.
It is our belief that performing systematic geo-referenced visual
inspections provides important added value with respect to conven-
tional methods of dam inspections.
The authors are P. Ridao, M. Carreras, R. Garcia, D.
Ribas and J. Batlle at the Institute of Informatics and
Applications, University of Girona, Spain.
Email:{pere, marcc, rafa, dribas, jbatlle}@eia.udg.edu
References
1] Cote, J. and Lavallee, J. (1995). Augmented reality graphic interface for
upstream dam inspection. In Proceed- ings of SPIE Telemanipulator and
Telepresence Technologies II, volume 2590, pages 33–39, Philadelphia, PA.
2] Poupart, M. e. a. (2001). Subacuatic inspections of EDF (electricite de
france) dams. In OCEANS, 2000. MTS/IEEE Conference and Exhibition, volume
2, pages 939–942, Rhode Island, USA.
3] Batlle, J., Nicosevici, T., García, R., and Carreras, M. (2003). ROV-aided dam
inspection: Practical results. In Proceedings of the 6th IFAC Conference on
Manoeuvring and Control of Marine Crafts, pages 309–312, Girona, Spain.
4] Ribas D, N. Palomer, P. Ridao, M. Carreras, and E. Hernàndez (2007). Ictineu
AUV wins the first SAUC-E competition. In Proceedings of the IEEE International
Conference on Robotics and Automation, pages 151–156, Roma, Italy.
5] Palomeras N., Ridao P., Carreras M., Silvestre C. (2009). Mission Control
System for an Autonomous Vehicle: Application Study of a Dam inspection using
an AUV. International Conference on Manoeuvring and Control of Marine Craft,
Guaruja-Sant Paulo, Brasil.
6] Kazmi, W., Ridao, P., and Ribas, D. (2009). Dam wall detection and tracking
using a mechanically scanned imaging sonar. In Proceedings of the IEEE
International Conference on Robotics and Automation, Kobe, Japan.
7] Kalman R. E. (1960). A new approach to linear filtering and prediction
problems. Transactions of the ASME, Journal of Basic Engineering, 82 (Series
D):35–45, March 1960.
8] Escartin, J., Garcia, R., Delaunoy, O., Ferrer, J., Gracias, N., Elibol, A., Cufi,
X., Neumann, L., Fornari, D. J., Humpris, S. E., and Renard, J. (2008). Globally
aligned photomosaic of the Lucky Strike hydrothermal vent field (Mid-Atlantic
Ridge, 3718.5’N): Release of georeferenced data, mosaic construc- tion, and
viewing software. Geochemistry Geophysics Geosystems, 9(12):Q12009.
Acknowledgements
This research was sponsored by the Spanish government under the grants
DPI2005-09001-C03-01 (Autonomous Robot for Dam Inspection) and PROFIT
010/SGTB/2007/1.1 (Hydraulic and Remote Sensing Techniques for Zebra
Mussel Management), in an activity executed by Ecohydros under the coordination
of the project leader DMADS ENDESA. We would like to thanks also the ENDESA
Generación Spanish Company for their help in the experiments in the Pasteral dam.
IWP& DC
Project9 20/4/09 14:53 Page 1

44 MAY 2010 INTERNATIONAL WATER POWER & DAM CONSTRUCTION
UNDERWATER INSPECTIONS
W
HEN it comes to underwater inspections there are a
number of products on the market to meet the differ-
ing requirements of hydroelectric and dam projects.
Below we take a look at some of the most recent
releases to hit the marketplace.
SAWFISH HELPS HYDRO HARVESTING
Combining elements from timber harvesting and marine vehicle tech-
nology, Triton Logging’s Sawsh underwater harvester is an innova-
tive deep water logging machine.
Canadian company Triton Logging researches, develops and markets
logging equipment to recover millions of trees ooded by hydro dams
worldwide, helping to manage large scale reservoir harvest projects.
Sawsh can navigate precisely by a remote pilot and is capable
of operation at any depth. In comparison, grapples and divers are
claimed to be limited to approximately 25m, even though 80% of
submerged timber resources are found at greater depths.
Efcient operation is made possible by Sawsh’s de-coupling cut-
ting and surfacing processes, which enable it to perform multiple cuts
without having to return to the surface.
Features of the product include:
r Fully remote control with eight video cameras and sonar.
r Powered by a 75hp electric motor, using biodegradable and vegeta-
ble oil-based hydraulic uids.
r Inatable/reusable air bags to oat trees to the surface.
In 2009 Triton Logging was recognised by the National Research
Council of Canada as a Canadian innovation leader, demonstrating spe-
cic advances in research and development within its industrial sector.
www.tritonlogging.com
BROADBAND DEVELOPMENTS FOR UNDERWATER
APPLICATION
Two advanced broadband acoustic systems have been developed by
researchers at Woods Hole Oceanographic Institution (WHOI) in
the US. This could mean a major advance in the ability to count and
classify sh and identify turbulence.
The two systems have been tested off the east coast of the US and
measure sound over a continuous range of frequency, generating
broadband acoustic spectra. In broadband spectrum the scattering
signal generated by sh centres at a frequency of 1-10Hz for small
sh, and since most echo sounders measure frequencies at 38-120Hz
they miss this key indicator. Ultimately broadband signals can be
used to discriminate between sh and other marine organisms, as well
as to identify both sizes and densities of sh.
The continuous range of frequencies used by broadband systems will
help to improve interpretation of data, providing more information so
sophisticated algorithms can be used and accuracy improved.
The work has been supported by the US Ofce of Naval research,
National Oceanic and Atmospheric Administration and WHOI.
Fisheries managers can use the system to determine stock sizes, while
the navy has been using the technology to learn how sh interfere
with underwater equipment. The hope is that other major companies
who manufacture acoustic systems will pick up on the broadband
technology and apply it to other industries.
SPOTLIGHT ON INSPECTION
US-based JW Fishers has developed an external light system for its
MC-1 mini camera which is designed for underwater applications.
The new light system provides high intensity lighting to optimise pic-
ture quality. An internal ring light with high intensity LEDS provides
the lighting when performing internal pipe inspections with the mini
cam. One or two lights can be attached directly to the camera hous-
ing. The 6” long, 2” diameter camera housing can be easily mounted
to a diver’s helmet or lowered into a pipe for internal inspections.
The mini camera is currently in use by diving companies worldwide,
although two companies have recently reported new and unique uses
for the product. A company based in Rhode Island that manufactures
sediment sampling devices, attached an MC-1 to its equipment so the
Getting to the bottom of it
IWP&DC takes a look at the latest products
and technologies available underwater
applications at dams and reservoirs
From top to bottom: Sawfish launched from a barge; the Sawish getting to
work; JW FIshers MC-1 mini camera on diver’s helmet

WWW.WATERPOWERMAGAZINE.COM MAY 2010 45
UNDERWATER INSPECTIONS
operator could view the area being sampled. While a dredging compa-
ny in Florida attached the camera to its equipment allowing the opera-
tor to view the bottom before and after dredging operations.
See www.jwshers.com for more information.
ZOOMING IN UNDERWATER
New from EZspycam is a telephoto zoom camera on a pre-assembled
retractable pole designed to support good portability for underwa-
ter inspections. The remote control unit allows you to congure the
camera and view close captured images magnied up to 22x optically
and up to 176x digitally. Night vision white LED lights means that
the product is ideal for use in dark, hard to reach areas as are often
found in dam inspections.
The acetyl coated housing for the camera is corrosion-free for salt-
water and chemical use.
For more details see www.ezspycam.com/ENC-130.htm.
ROTATING HEAD SONAR PUTS SPIN ON INSPECTIONS
AquaCoustic has collaborated with a leading sonar manufacturer in the
development of a specialised proling sonar system. The use of a rotating
head sonar can provide accurate information about critical dam and res-
ervoir features which could compromise structural integrity if left unad-
dressed. The system can provide accurate visualisation and measurement
of underwater features of up to 2mm resolution at close range.
Advantages of the sonar include accurate data collection and real
time eld observations which allow on-site assessment of unusual
features that may require further investigation. Real time on-screen
review of the sonar proles allows modication of the survey and
data can be used in AutoCAD or other modelling software. The
system can also be deployed from a small vessel, a xed structure
such as an intake or spillway, or through ice.
The proling sonar technique has the following applications in
dam inspections:
r Detailed investigating and monitoring of sink holes.
r Identify and measure retrogression of scour and undermining
towards the dam structure from plunge pools.
r Determine earthquake values by accurate measurement of dam
slope prole from a single point.
r Gather detailed data from hard to reach areas such as under over-
hangs, vertical dam faces and structures, and across the bottom.
r Accurate data can be obtained up to the shoreline or beside vertical
structures where boat soundings are not reliable.
r Volume measurements for water inundation studies.
r Siltation volume measurement.
r Debris identication.
r Pre- and post-dredging quality control.
r Internal tunnel and pipe surveys.
www.aquacoustic.com
DIVING AIDS
DCN Diving BV is based in the Netherlands and utilises a selection
of different techniques and systems for underwater inspections. The
use of a self-propelled habitat can minimise diver excursion distances
during dam inspections. Based on an inhouse concept the system is
operated either by divers or from the surface.
The habitat is connected via the main umbilical to the habitat control
room and live support systems and divers are connected to the habitat
via short 20m length excursion umbilical. This concept creates a safe
and dry working environment which allows divers to work over long
distances in conned spaces. It can cover distances up to 400m with a
minimum width of 2500mm and a maximum width of 2800mm.
The company also uses a remotely operated cleaning machine
(ROCM) which is described as the ideal platform for cleaning and
removal of debris and sediment inside pipelines, culverts and outfalls.
The system removes debris by using hydraulically operated brushes
and the debris is pumped through a exible hose to a discharge location.
The vehicle is mounted on tracks and controlled from the surface.
Advantages of the ROCM include:
r Low risk, no human (diver) intervention for normal cleaning operations.
r Shut down periods can be kept to a minimum.
r Video and photographic images can be displayed in real time.
r No dewatering required.
www.dcndiving.com
IWP& DC
Top, left to right: AquaCoustic Dual Axis Sonar; Aquacoustic Pole with Dual
Axis Sonar on bottom being oriented
Above: View of dam from the ice. Courtesy AquaCoustic
AquaCoustic cutting deployment hole through ice
AquaCoustic portable work tent
PROFESSIONAL DIRECTORY
46 MAY 2010 INTERNATIONAL WATER POWER & DAM CONSTRUCTION
CLASSIFIED
www.waterpowermagazine.com
MORE THAN 100 YEARS OF HYDROPOWER ENGINEERING
AND CONSTRUCTION MANAGEMENT EXPERIENCE
260 Dams and 60 Hydropower Plants (15,000 MW)
built in 70 countries
Water resources and hydroelectric development
•Public and private developers
•BOT and EPC projects
•New projects, upgrading and rehabilitation
•Sustainable development
with water transfer, hydropower, pumping stations
and dams.
COYNE ET BELLIER
9, allée des Barbanniers
92632 GENNEVILLIERS CEDEX - FRANCE
Tel : +33 1 41 85 03 69
Fax: +33 1 41 85 03 74
e.mail: commercial@coyne-et-bellier.fr
website: www.coyne-et-bellier.fr
COYNE ET BELLIER
Bureau d’Ingénieurs Conseils
www.coyne-et-bellier.fr
Over 40 years experience in Dams.
CFRD Specialist Design and Construction
●
Dam Safety Inspection
●
Construction Supervision
●
Instrumentation
●
RCC Dam Inspection
●
Panel Expert Works
Av. Giovanni Gronchi, 5445 sala 172, Sao Paulo –
Brazil
ZIP Code – 05724-003
Phone: +55-11-3744.8951
Fax: +55-11-3743.4256
Email: bayardo.materon@terra.com.br
ba_mater@yahoo.com.br
Lahmeyer International GmbH
Friedberger Strasse 173 · D-61118 Bad Vilbel, Germany
Tel.: +49 (6101) 55-1164 · Fax: +49 (6101) 55-1715
E-Mail: bernd.metzger@lahmeyer.de · http://www.lahmeyer.de
Your Partner for
Water Resources and
Hydroelectric Development
All Services for Complete Solutions
• from concept to completion and operation
• from projects to complex systems
• from local to multinational schemes
• for public and private developers
Norconsult AS
Vestfjordgaten 4,
1338 Sandvika, Norway
Tel: +47 67 57 10 00
Fax: +47 67 54 45 76
company@norconsult.com
Power and Water Management
Norconsult provides multidisciplinary
consultancy services within power
and water resources development.
www.norconsult.com
• River Basin Studies
• Underground Hydropower
• Dam Design
• Tu r b i n e M a i n t e n a n c e a n d
Optimisation
• Transmission and Distribution
• Environmental Impact Assessments
• Financial Engineering
• Power Utility Services
AF-Colenco Ltd
Täfernstrasse 26 • CH-5405 Baden/Switzerland
Phone +41 (0)56 483 12 12 • Fax +41 (0)56 483 17 99
c
olenco-info@afconsult.com • http://www.af-colenco.com
Consulting / Engineering and EPC Services for:
• Hydropower Plants
• Dams and Reservoirs
• Hydraulic Structures
• Hydraulic Steel Structures
• Geotechnics and Foundations
• Electrical / Mechanical Equipment
Successful projects in
Hydropower and Water
Management
For further information please contact
hp.energy@poyry.com and visit www.poyry.com
Construction and
refurbishment of small
and medium hydro
power plants.
.
t
u
r
n
k
e
y
/
E
P
C p
l
a
n
t
s
.
d
e
s
i
g
n
&
e
n
g
i
n
e
e
r
i
n
g
.
t
u
r
b
i
n
e
s
.
f
ea
s
i
b
i
l
i
ty
s
t
udi
es
.
o
p
e
r
a
t
i
o
n
s
e
r
v
i
c
e
s
.
financ
i
ng
www.hydropol.cz
# (47) 67 53 15 06 in Norway
# (55) 11 3722 0889 in Brazil
E-mail: nickrbarton@hotmail.com
Website: http//www.qtbm.com
3
3
5
5
y
y
e
e
a
a
r
r
s
s
e
e
x
x
p
p
e
e
r
r
i
i
e
e
n
n
c
c
e
e
f
f
r
r
o
o
m
m
m
m
o
o
r
r
e
e
t
t
h
h
a
a
n
n
3
3
0
0
c
c
o
o
u
u
n
n
t
t
r
r
i
i
e
e
s
s
E
ngineering and consulting services
-
Hydropower
- Dams
- Tunnels
- Underground works
- Special studies
f
rom preliminary studies to final
design, construction supervision,
rehabilitation, monitoring and expert
opinion
Lombardi Engineering Ltd.
V
ia R. Simen 19, P.O.Box 1535, CH-6648 Minusio
Telephone +41 (0)91 735 31 00, Fax +41 (0)91 743 97 37
info@lombardi.ch, www.lombardi.ch

PROFESSIONAL DIRECTORY
WWW.WATERPOWERMAGAZINE.COM MAY 2010 47
CLASSIFIED
www.waterpowermagazine.com
Yolsu Engineering Services Ltd. Co.
Hürriyet Caddesi No:135 Dikmen, 06450 Ankara,TURKEY
Tel: +90 312 480 06 01 (pbx) Fax: +90 312 483 31 35
www.yolsu.com.tr info@yolsu.com.tr
Prefeasibilty, Feasibility,
Final & Detail Design,
Consulting Services:
• Basin development
• Dams and hydropower plants
• Irrigation and drainage
• Water supply and sewerage
• River engineering
• Highways and railways
Stellba Hydro AG Stellba Hydro GmbH & Co KG
Langgas 2 Badenbergstrasse 30
CH-5244 Birrhard D-89520 Heidenheim
Switzerland Germany
Telefon +41 (0)56 201 45 20 Telefon +49 (0)7321 96 92 0
Telefax +41 (0)56 201 45 21 Telefax +49 (0)7321 6 20 73
Internet www.stellba-hydro.ch Internet www.stellba.de
E-Mail info@stellba-hydro.ch E-Mail info@stellba.de
721
VISIT OUR WEBSITE
WWW.WATERPOWERMAGAZINE.COM
www.rizzoassoc.com
WATER RESOURCES POWER GENERATION
MINING TUNNELS
Classified
opportunities
www.waterpowermagazine.com
The classified section in Water Power & Dam Construction
is a well established and popular section with the magazine’s
combined print and digital circulation of 16,000. Commonly
known as where “the buyer meets the seller”.
Industry showcases
The industry showcase section is made up of eighth
page adverts (95x65mm) with a maximum of eight
key suppliers to a page. It is an ideal section to
promote products and services, raise brand
awareness and shout about company successes.
Showcase adverts are also an ideal way to promote
product literature and generate interest.
Recommended duration: minimum 3 months
Recruitment
The ideal way to promote a company
vac ancy and rea ch experienced
professionals looking for the next
opportunity to advance t heir c areer in the
hydro power & dam construction industries.
For more information, please contact
Diane Stanbury Tel: +44 (0)20 8269 7854 or email: dianestanbury@globaltrademedia.com
TECBARRAGEM
SLIPFORM
Phone/Fax: + 5511 51812527
tecbarragem@tecbarragem.com.br
Website: www.tecbarragem.com.br
• Faster Constructive System for Civil Works
• Specialists in Hydroelectric and Dam Projects
• Qualified Projectists, Engineers and Technicians
• Special Formworks and Slipforms
WORLD MARKETPLACE
48 MAY 2010 INTERNATIONAL WATER POWER & DAM CONSTRUCTION
CLASSIFIED
www.waterpowermagazine.com
CYLINDERS
CRANES
GATES
GATES
HYDROMECHANICAL
EQUIPMENT
• Custom Design Hydraulic Cylinders
•
Servomotors
•
Piston Accumulators'
• Hydraulic Power Units
•
Control Panels
www.doucehydro.com
Douce Hydro FRANCE, USA and GERMANY
Tel France: + 33 / 3 22 74 31 08 ; E-mail: afleroy@doucehydro.com
Tel USA: + 1 / 586 566 4725 ; E-mail: fvandenbulke@doucehydro.com
Tel Germany: + 49 / 177 398 37 78 ; E-mail : ublase-henke@doucehydro.com
BEARINGS
PAN
®
bronzes
and
PAN
®
-GF
self-lubricating bearings
Since 1931
- Superior quality with
• Highest wear resistance
• Low maintenance
• Or maintenance free
-
Extended operating life
PAN-Metallgesellschaft
P.O. Box 102436 • D-68024 Mannheim / Germany
Phone: + 49 621 42 303-0 • Fax: + 49 621 42 303-33
k
ontakt@pan-metall.com • www.pan-metall.com
BEARING OIL COOLERS
HEXECO, Inc. ... a Heat Exchanger Engineering Co.
T
el: +1 (920) 361-3440 • Fax: +1 (920) 361-4554
E-Mail: info.wpd@hexeco.com • Web: www.hexeco.com
O
IL COOLERS
For
THRUST and
GUIDE
BEARINGS
CONCRETE COOLING
FILTRATION EQUIPMENT
WWW.WATERPOWERMAGAZINE.COM
CIVIL ENGINEERING:
U Þ`iÀÃ] «ÜiÀ ÕÌÃ >` VÌÀÃ
vÀ `> }>ÌiÃ] ëÜ>Þ }>ÌiÃ]
Ì>i }>ÌiÃ] ÃÕVi }>ÌiÃ
U }iiÀ}] ÃÌ>>Ì >` V
ÃÃ} v V«iÌi Þ`À>ÕV
>` iiVÌÀV ÃÞÃÌià vÀ `> }>Ìi
«iÀ>Ì Õ« Ì >ÕÌ>ÌV ÀiÃiÀÛÀ
ÌÀ} >` VÌÀ ,®
www.montanhydraulik.com
Providing water control solutions through thoughtful engineering,
innov ative design, attention to detail and outstanding customer
service. Contact us for inflatable water control gates and rubber
dams.
PO Box 668, Fort Collins, CO 80522 USA
Tel: 970-568-9844
www.obermeyerhydro.com
HYDRO CASTINGS
• Water turbine components
• Castings from 100 kg to 30 tons
• Latest CAD-CAM capabilities
• Certified Quality Assurance ISO 9001
• Environmental Management System ISO14001
Your contact: Mr. Timo Norvasto, Sales Manager
Lokomo Steel Foundry
Tel: +358 204 84 4222
Fax: +358 204 84 4233
Email: timo.norvasto@metso.com
Web: www.metsofoundries.com
CONCRETE COOLING
• COLD & ICE WATERPLANTS
• FLAKE ICE PLANTS
• ICE DELIVERY & WEIGHING SYSTEMS
• ICE STORAGES
KTI-Plersch Kältetechnik GmbH
Carl-Otto-Weg 14/2
88481 Balzheim
Germany
Tel:/Phone: +49 - 7347 - 95 72 - 0
Fax: +49 - 7347 - 95 72 - 22
Email: ice@kti-plersch.com
Website: www.kti-plersch.com

WORLD MARKETPLACE
WWW.WATERPOWERMAGAZINE.COM MAY 2010 49
CLASSIFIED
www.waterpowermagazine.com
HYDROMECHANICAL
EQUIPMENT
HYDRO POWER
PLANT EQUIPMENT
HYDRO POWER
PLANT EQUIPMENT
ANDRITZ HYDRO GmbH
Penzinger Strasse 76, A-1141 Vienna, Austria
Phone: +43 (1) 89100-0, Fax: +43 (1) 8946046
contact-hydro@andritz.com • www.andritz.com
Your Partner
for renewable and clean energy
We focus on the best solution – from water to wire.
Voith Hydro Holding GmbH & Co. KG
Alexanderstrasse 11
89522 Heidenheim/Germany
www.voithhydro.com
A Voith and Siemens Company
! Water power plant equipment
(electrical and mechanical)
! Pumps
! Governors
! Automation
! Modernization of existing power plants
! Hydro power services
! Ocean energies
INSTRUMENTATION
(DAM MONITORING)
INSTRUMENTATION
(DAM MONITORING)
Vikas Kothari: Executive Director Tel: 91 11 29565552 TO 55
Om Metals Infraprojects Ltd. Fax: 91 11 29565551
4th Floor, NBCC Plaza, Mobile: 91 98110 68101
Tower III, Sector 5, Email: vikas@ommetals.com
Pushp Vihar, info@ommetals.com
Saket, New Delhi, 110 017, INDIA Web: www.ommetals.com
T
urnkey EPC contracts for:
•Radial Gates •Trash Racks & TRCM
•Vertical Gates •Gantry Cranes & EOT
•
Penstocks •Mechanical/ Hydraulic Hoists
•Stoplogs •Draft Tubes
Turnkey EPC contracts for:
•Radial Gates •Trash Racks & TRCM
•Vertical Gates •Gantry Cranes & EOT
•
Penstocks •Mechanical/ Hydraulic Hoists
•Stoplogs •Draft Tubes
Om Metals
Reliable and innovative solutions utilizing
over 156 years continuos hydro-electric
experience.
Fully customised supply of turbines,
generators, controls, switchgear &
associated plant up to around 20MW,
including a micro hydro range of turbines.
Japan: Gilbert Gilkes & Gordon Ltd
h-yamamo@rf6.so-net.ne.jp
North America:
Vancouver Island Technology Park
2103 - 4464 Markham Street
Victoria BC V8Z 7X8
b.sellars@gilkes.com
t: 250-483-3883
UK: Gilbert Gilkes & Gordon Ltd,
Canal head North, Kendal,
Cumbria LA9 7BZ
[ M
hydro@gilkes.com
! World wide referenced water to wire General Contractor
! Turbines and Generators
! Electromechanical Equipment
! Switchgears
! Control Protection Monitoring and SCADA Systems
! Balance of the Plant
! Turn key projects
! Rehabilitation
S.T.E. S.p.a. - Via Sorio, 120 - 35141, PADOVA(Italy)
tel. +39 049 2963900 - fax. +39 049 2963901
Email: ste@ste-energy.com Web: www.ste-energy.com
ISO 9001 CERTIFIED
Geokon, Incorporated manufactures a full range
of geotechnical instrumentation suitable for
monitoring dams. Geokon instrumentation employs
vibrating wire technology that provides measurable
advantages and proven long-term stability.
The World Leader in
Vibrating Wire Technology
TM
Geokon, Incorporated
4
8 Spencer Street
Lebanon, New Hampshire
03766
•
USA
Dam Monitoring Instrumentation
1
•
603
•
448
•
1562
1
•
603
•
448
•
3216
info@geokon.com
www.geokon.com
Dam Safety Instrumentation • Fiber Optic and
Vibrating Wire Technologies • In-Situ Testing
and Turn-Key Solutions
• Piezometers
• Pressure Cells
• Extensometers
• Crackmeters
• Inclinometers
• Tiltmeters
1-877-ROCTEST
info@roctest.com • www.roctest.com
33.1.64.06.40.80
info@telemac.fr
• www.telemac.fr
INSTRUMENTATION
(GEOTECHNICAL)
WORLD MARKETPLACE
50 MAY 2010 INTERNATIONAL WATER POWER & DAM CONSTRUCTION
CLASSIFIED
www.waterpowermagazine.com
SMALL HYDROELECTRIC
POWER SETS
SMALL HYDROELECTRIC
POWER SETS
TRASHRACK RAKES
MICRO/SMALL
HYDROELECTRIC POWER SETS
INSTRUMENTATION
(GEOTECHNICAL)
SCREENING
Planning a run-of-river project?
Reduce your capital costs signicantly!
Why a coanda intake?
● Eliminates desander
● Protects your investment
from premature wear
and debris.
● Flows up to 25 M3/sec.
● Screens out debris
down to 0.5mm
● Customizable for
a range of conditions
● MAXIMIZES POWER
GENERATION
Partial Discharge?
www.pdix.com
PARTIAL DISCHARGE DETECTION
+43 - 7234 - 83 902