Wang X. Vehicle Noise and Vibration Refinement
Подождите немного. Документ загружается.

10 Vehicle noise and vibration refi nement
© Woodhead Publishing Limited, 2010
• Analyse the test results and suggest solutions for the problems to the
relevant engineering party.
• Install the design solutions supplied by the relevant engineering party
into the vehicle and validate them under the same vehicle operating
conditions.
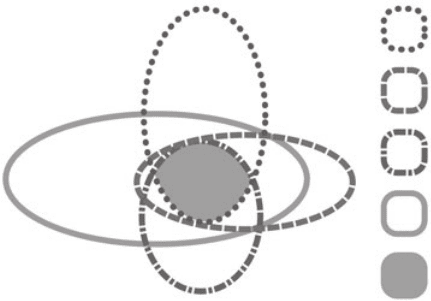
NVH engineers must recognize that there are many trade-offs between
NVH performance, engine power, fuel economy, development time, cost,
weight, etc. A compromise must be reached in the development process as
shown in Fig. 1.4.
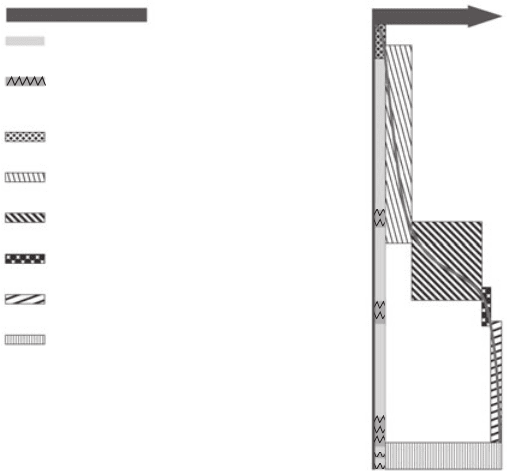
Figure 1.5 shows the steeply increasing committed cost as the commit-
ment to tooling is made during the program. Therefore maximum utiliza-
tion of virtual testing to identify potential issues prior to the tooling stage
will signifi cantly reduce development time and cost, although physical
testing of the subsystems and the complete vehicle is still required to ensure
that the ‘as manufactured’ vehicle consistently meets the performance
targets set.
In order to reduce vehicle development cost and time, an improved
vehicle development process is proposed as shown in Fig. 1.6 where a target
setting, cascading, synthesis and confi rmation approach is applied to design
instead of the traditional design–build–test–redesign approach. This
approach facilitates the use of analytical prediction tools early in the
process, reducing the use of expensive physical prototype testing. It also
allows for design efforts to be shared across the automotive manufacturer
and supplier chain. The process can be implemented with a variety of tools
and specifi c applications. The overall requirement is to maintain commu-
nication between the independent tasks as the results from each sub-
process become available. The activities in the arrowed process fl ow are
Packaging space
Mass
Cost
Compromised solution
available
Noise & vibration requirement
1.4 Compromised solutions in the vehicle development process
(copyright RMIT University, 2008, Wang, X.).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2
Rationale and history of vehicle noise and vibration refi nement 11
© Woodhead Publishing Limited, 2010
positioned relative to time, with the initial target setting activity occurring
fi rst. The intention is for the virtual validation to lead the physical validation
and thus accelerate the overall design process. The parallel ‘V’ image
indicates that both validation paths are required. The virtual path is the
optimization path that leads to the release of design elements requiring long
lead times such as component tooling. The physical path is the confi rmation
path that must capture effects that cannot be modelled with certainty, such
as abrasion and wear, joint fatigue and progressive NVH degradation. The
image also shows that the product development process must be advanced
through continuous virtual and physical correlation.
The overall design engineering process begins with the initial vehicle
target setting as the fi rst stage. The end customers and their demands for
specifi c vehicle characteristics drive the basic requirements. This ‘voice of
the customer’ is combined with the existing internal knowledge and bench-
marks of competitive vehicles already in the marketplace, along with cost,
weight and performance targets to defi ne the primary vehicle assumptions.
The initial assumptions create the top-level design goals for the complete
vehicle.
Target setting
Cascading
Synthesis
Design confirmation
Sub-system
validation
Quality
Product validation
Key
Committed costs
Analytical methods
Physical methods
Concept
Design
Tooling
Sub-system
manufacture
Vehicle manufacture
Production
1.5 Integration of physical and analytical methods (copyright Grote,
P. and Sharp, M., ‘Defi ning the vehicle development process’, Keynote
Paper, Symposium on International Automotive Technology, 2001,
SAE).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2

© Woodhead Publishing Limited, 2010
Corporate product
development
requirements
System targets
(e.g. suspension)
Component targets
(e.g. knuckle)
Cascade
design
requirements
Component analysis
System analysis Vehicle analysis
Vehicle tests
System tests
Design loads
Set targets for design
Synthesize
design
performance
Confirm
physical design
performance
Model correlation
Model correlation Model correlation
Vehicle targets
Lifecycle durability
NVH ratings
Structural durability
Stiffness, damping
Road/tyre/brake isolation
Sub-system weight
Structural durability
Attribute degradation
(alignment, NVH, etc.)
Strength
Fatigue life
Weight
Stress
Fatigue life
Weight optimization
Durability
K&C
Weight
Durability
NVH
Ride & handling crash
Loads confirmation
Structural (NVH)
Ride & handling
Crashworthiness
Component tests
Fatigue life
Crash performance
CAFE (weight)
Ride & handling
1.6 The emerging vehicle development model (copyright Grote, P. and Sharp, M., ‘Defi ning the vehicle
development process’, Keynote Paper, Symposium on International Automotive Technology, 2001, SAE).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2
Rationale and history of vehicle noise and vibration refi nement 13
© Woodhead Publishing Limited, 2010
The second stage is target cascading which subdivides the top-level design
goals into system, subsystem and individual component goal levels. This
stage relies heavily on CAE tools to defi ne all of the vehicle components
with individual target loads and constraints in a digital model. There may
be several iterations as the targets are interpreted for each layer of design.
There are many trade-offs to be determined with different criteria for
safety, performance, NVH, durability and other disciplines.
The third stage is synthesis where the designs for individual components
and sub-assemblies are completed using a variety of computer aided design
(CAD) tools. This stage utilizes CAE tools to generate virtual test results
which may require modifi cation to the initial target values and thus addi-
tional trade-offs. These tools typically allow for analysis and prediction of
expected results that can be compared to the target data values previously
established. One goal of this stage is to identify these necessary trade-offs
before committing to specifi c product design, thus accelerating the overall
design process. This stage is therefore referred to as ‘virtual testing’ as
various design levels can be tested with computer simulation methods prior
to the manufacture of any prototype physical parts. The sequence of the
virtual testing process is component, sub-assembly, sub-system and the full
vehicle. The design goals at each level are thus validated with corresponding
virtual tests at each level.
The fourth stage is confi rmation by physical testing where prototype
parts, sub-systems and systems are subsequently evaluated and validated in
a similar sequence to the virtual testing process until the complete vehicle
is ready for fi nal evaluation. Each activity within the physical testing stage
results in additional data that can be used to validate computer models.
The continuous feedback may require additional changes to the target
levels and vehicle design parameters.
The hybrid simulation is also used to set targets for vehicle development
in the ‘V’ approach. The process starts with full-vehicle performance targets
that are cascaded down to requirements for sub-systems (drivetrain, chassis,
suspension, etc.), and fi nally to components (bushings, mounts, struts, etc.).
Hardware is then designed, built and assembled into a prototype vehicle in
the bottom part of the ‘V’ where physical testing usually leads to several
redesign cycles to iron out problems. In this ‘V’ approach, most car compa-
nies use simulation tools such as Finite Element Analysis (FEA) to help
speed the process after CAD has defi ned the geometry of sub-systems,
assemblies and parts. By that time, important design decisions have been
made and considerable time and expense are required for any reconfi gura-
tion. This problem can be eliminated with function-driven design that
aims to accurately establish functional performance requirements through
target setting, much earlier in the process before the detailed design has
started. This eliminates the repetitive build–test–redesign cycles later in
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2
14 Vehicle noise and vibration refi nement
© Woodhead Publishing Limited, 2010
development by performing analysis earlier with more system-level full-
vehicle simulation during the conceptual target-setting stage. By perform-
ing up-front engineering, the performance targets can be more accurately
established, and thus better strategic decisions on vehicle design can be
made. In this way, time and expense can be saved later in the bottom part
of the ‘V’, as fewer prototype testing cycles are required.
1.5 Vehicle noise and vibration term defi nitions
Noise, vibration and harshness, also known as noise and vibration, abbrevi-
ated to NVH and N&V respectively, is the name given to the fi eld of mea-
suring and modifying the noise and vibration characteristics of vehicles,
particularly cars and trucks. Harshness is somewhat of an historical misno-
mer. Noise and vibration can be measured, but harshness is a more subjec-
tive assessment. There is a psychoacoustic measurement called harshness
but it does not correlate very well with many harshness issues. Interior
NVH is the noise and vibration experienced by the occupants of the vehicle
cabin, while exterior NVH is largely concerned with the noise radiated by
the vehicle, and includes drive-by noise. The noise being generated by fl uid
pressure fl uctuation and passage through the air is called airborne noise.
The noise radiated from a structure’s surface that is vibrating is called
structure-borne noise. Noise is used here to describe audible sound, with
particular attention paid to the frequency range from 30 to 4000 Hz.
Vibration is used to describe tactile vibration, with particular attention paid
to the frequency range from 30 to 200 Hz.
1.6 History of motoring and vehicle refi nement
It is frequently diffi cult to trace the earliest examples of automobiles. In
1885, Karl Benz invented a motorized tricycle in which the wheels were
made of timber and steel. Those who rode such a vehicle experienced bad
harshness. In 1888, John Dunlop invented air-fi lled or pneumatic tyres. In
1904 Continental presented the world’s fi rst automobile tyre with a pat-
terned tread. The wheel/road-induced noise and vibration were reduced by
the air-fi lled or pneumatic tyres. Other vibration isolators such as rubber
bushes and engine mounts were also invented and introduced in vehicles
for the reduction of noise vibration harshness. Figure 1.7 shows a 1905
four-cylinder Tarrant with chain-driven rear wheels. In 1909, Henry Ford
launched his mass production method for the Model T which made cars
available to a large section of the public. The hard, tedious, repetitive work
created resentment, resulted in poor workmanship and quality and pro-
duced badly fi nished, unreliable vehicles. Vehicle refi nement became nec-
essary. The Volkswagen ‘Beetle’ had little refi nement but many innovative
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2

Rationale and history of vehicle noise and vibration refi nement 15
© Woodhead Publishing Limited, 2010
features. This vehicle was designed by Ferdinand Porsche in the late 1930s
at the behest of Adolf Hitler. By the 1970s, its styling was antiquated,
its air-cooled engine was noisy, yet it sold well throughout the world,
in particular in the USA. In fact, the metallic sound of the air-cooled
engine is not recognized as noise but accepted as one of the brand charac-
teristics of today’s Porsche cars. Today’s VW ‘Beetles’ have been well
refi ned in all aspects, including noise vibration harshness. Vauxhall and
HSV are refi ned vehicle brands for GM passenger cars, while Tick Ford
and FPV are refi ned vehicle brands for Ford in which the driveability and
ride are upgraded. Lexus are refi ned Toyota passenger cars in which noise
and vibration are greatly reduced. High series passenger cars are refi ned
from low series ones by improving noise vibration harshness, driveability
and ride. The term ‘vehicle refi nement’ is placed in the mind of the
customer as being a relevant factor in the decision making process of
buying a car.
The early vehicle noise and vibration refi nement materials were grease,
motor oil, rubber bushes, washers, gaskets, springs, mass dampers, bolts
and nuts, cushions, earplugs and gloves; the early noise and vibration refi ne-
ment tools were stereoscopes, screwdrivers, earphones, tape recorders, dial
gauges, balancers, water bulb levelling meters, hands, eyes and ears, which
are still practical for use and popular today. Engineers subjectively evalu-
ated vehicle noise and vibration performance and solved the NVH prob-
lems by traditional mechanical tools and methods.
1.7 The 14–16 horsepower four-cylinder Tarrant – the Melbourne-built
car that set an Australian 1000-mile (1600-km) speed record in 1905
(copyright Tuckey, B., Australians and Their Cars, Bondi Junction,
NSW: Focus, 2003).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2
16 Vehicle noise and vibration refi nement
© Woodhead Publishing Limited, 2010
In 1876, Emile Berliner, Elisha Gray and Alexander Graham Bell
invented the fi rst microphone used as a telephone voice transmitter. The
microphone associated with the fi rst articulate telephone transmitter was
the liquid transmitter of 1876. In 1938, Hans J. Meier at MIT was the fi rst
person to construct a commercial strain gauge accelerometer. Magnetic
recording was conceived as early as 1877 by Oberlin Smith. The fi rst wire
recorder was the Valdemar Poulsen Telegraphone of the late 1890s. Since
their fi rst introduction, analogue tape recorders have experienced a long
series of progressive developments resulting in increased sound quality,
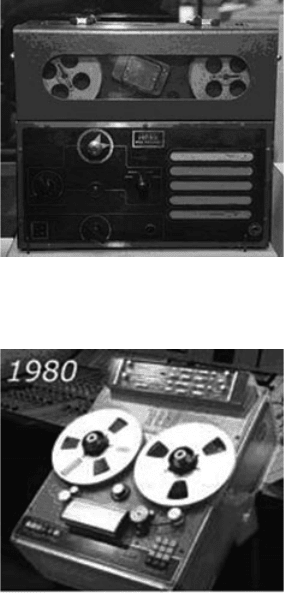
convenience and versatility, and Fig. 1.8 shows such a recorder from 1945.
Computer-controlled analogue tape recorders were introduced by Oscar
Bonello in Argentina as shown in Fig. 1.9 where the mechanical transport
used three DC motors and introduced two new advances: automated micro-
processor transport control and automatic adjustment of bias and frequency
response. In 30 seconds the recorder adjusted its bias and provided best
1.8 Peirce 55-B dictation wire recorder from 1945 (copyright
http://en.wikipedia.org/wiki/Wire_recorder).
1.9 Solidyne GMS200 tape recorder with computer self-adjustment,
Argentina, 1980–1990 (copyright http://en.wikipedia.org/wiki/
Tape_recorder).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2

Rationale and history of vehicle noise and vibration refi nement 17
© Woodhead Publishing Limited, 2010
frequency response to match the brand and batch of magnetic tape used.
The microprocessor control of transport allowed fast location of any point
on the tape. Around 1820, Charles Xavier Thomas created the fi rst success-
ful, mass-produced mechanical calculator, the Thomas Arithmometer, that
could add, subtract, multiply and divide. It was based mainly on Leibniz’s
work. Mechanical calculators, like the base-10 addiator, the comptometer,
the Monroe, the Curta and the Addo-X, were used throughout the twent-
ieth century (e.g. see Fig. 1.10) right up until the 1970s. The IBM PC AT
286, 386 and 486 appeared in the early 1980s, then came PC Pentium tech-
nology. PC data acquisition and sound card technology have replaced
digital and analogue tape recording technology for recording and analysing
noise and vibration test data.
1.7 References and bibliography
Grote, P. and Sharp, M. (2001), ‘Defi ning the vehicle development process’, Keynote
Paper, Symposium on International. Automotive Technology, SAE.
Happian-Smith, J. (2002), An Introduction to Modern Vehicle Design, SAE
International, Butterworth-Heinemann.
Harrison, M. (2004), Vehicle Refi nement – Controlling Noise and Vibration in Road
Vehicles, SAE International, Elsevier Butterworth-Heinemann.
Tuckey, B. (2003), Australians and Their Cars, Bondi Junction, NSW: Focus.
Wang, X. (2005), Introduction to Motor Vehicle Design, RMIT Publisher.
1.10 A mechanical calculator from 1914. Note the lever used to rotate
the gears (copyright http://en.wikipedia.org/wiki/History_of_
computing_hardware).
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:55 AM
IP Address: 129.132.208.2

© Woodhead Publishing Limited, 2010
18
2
Target setting and benchmarking for
vehicle noise and vibration refi nement
X. WANG, RMIT University, Australia
Abstract: In order to develop new vehicle products with well-refi ned
noise and vibration performance, noise and vibration targets must be set
up. Market research helps to select the best-in-class competitors’ vehicles
and determine benchmark vehicles to be studied. Benchmark analysis
together with CAE modelling facilitates vehicle noise and vibration
target setting and target cascading. This chapter summarizes objectives,
signifi cance and scope of vehicle noise and vibration target setting and
benchmarking. Examples are given to illustrate how to conduct vehicle
noise and vibration benchmarking, target setting and target cascading.
Key words: target setting, target cascading, benchmarking, interior noise
target, exterior noise target, subjective evaluation, objective testing,
whole-vehicle noise and vibration, components/subsystems noise and
vibration, sound pressure level, sound quality, sound power, articulate
index, statistical energy analysis, transfer path analysis.
2.1 Introduction
As mentioned in Chapter 1, in the fi rst phase of a vehicle development
program, market analysis, benchmark study and target setting are impor-
tant tasks. The object of benchmark study is to determine the best-in-class
competitors. Requirement, design and performance constitute the three
stages of the vehicle development process as shown in Fig. 2.1. The purpose
of target setting is to establish design requirements. Vehicle targets are set
based on the benchmark study, the voice of the customer and business/
industry/government regulation, as shown in Fig. 2.2.
Market analysis determines which group of customers the vehicle is
targeting; customer wants from this group and competitors’ vehicles for
benchmark study are then determined. The competitors’ vehicles are ana-
lysed to determine the competitor best-in-class systems and subsystems;
overall vehicle specifi cations and targets are then determined as shown in
Fig. 2.3.
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:57 AM
IP Address: 129.132.208.2

Target setting and benchmarking for vehicle noise 19
© Woodhead Publishing Limited, 2010
Requirement Design Performance
Voice of the
customer
Business/industry
regulation
Balance/constraints
BOM, mass, cost/financial
Vehicle
technical req.
Vehicle
design
Vehicle
performance
Customer
acceptance
Subsystem
technical req.
Subsystem
design
Component
technical req.
Component
design
Subsystem
performance
Component
performance
2.1 Vehicle development process.
Customer
wants
Customer, corporate and regulatory goals
lead to mission specifications (targets)
for a vehicle
How do we derive
actionable design
targets from these
top-level
specifications?
Corporate
wants
Regulatory
musts
2.1.1 Objectives and signifi cance of vehicle noise and
vibration target setting and benchmarking
Benchmarking allows for greater understanding of vehicle systems, subsys-
tems and components and their design targets. Apple-to-apple, back-to-
back comparisons give information about what are good designs, and what
are poor designs, and what are realistic design targets. The development
focuses are then better calibrated. The purpose of the benchmark study is
to identify the competitor best-in-class and facilitate noise and vibration
target setting for the vehicle system, subsystems and components.
2.2 Basic inputs for vehicle development target setting [2].
Copyrighted Material downloaded from Woodhead Publishing Online
Delivered by http://woodhead.metapress.com
ETH Zuerich (307-97-768)
Sunday, August 28, 2011 12:00:57 AM
IP Address: 129.132.208.2