Вольдек А.И. Электрические машины
Подождите немного. Документ загружается.

составляет 0,4—0,5 мм, а в машинах большой мощности — не-
сколько миллиметров.
Асинхронные машины, как правило, охлаждаются воздухом.
Системы вентиляции в принципе являются такими же, как и у ма-
шин постоянного тока (см. § 8-5).
Вращающееся магнитное поле. На рис. 19-5 представлены попе-
речные разрезы двухполюсного (2р — 2) асинхронного двигателя
и показан характер магнитного поля статора для двух моментов
времени.
На рис. 19-5 изображена простейшая обмотка статора, когда
каждая фаза состоит из одного витка или двух проводников (1-я
фаза — проводники А и X, 2.-я фаза — про-
водники В и У, 3-я фаза — проводники
С ч Z)
1
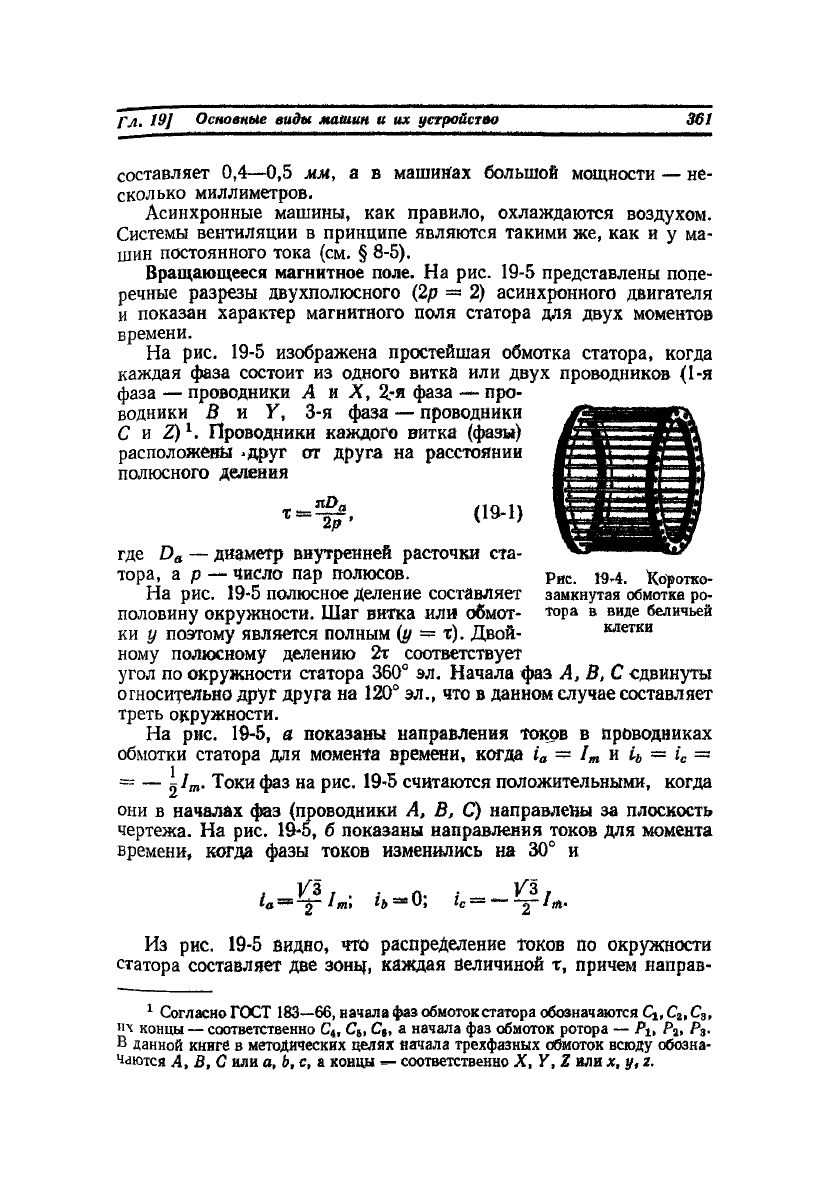
. Проводники каждого витка (фазы)
расположены -друг от друга на расстоянии
полюсного деления
пР
а
* 2 р'
(19-1)
Рис. 19-4. Коротко-
замкнутая обмотке ро-
тора в виде беличьей
клетки
где D
a
— диаметр внутренней расточки ста-
тора, ар — число пар полюсов.
На рис. 19-5 полюсное Деление составляет
половину окружности. Шаг витка или обмот-
ки у поэтому является полным (у = т). Двой-
ному полюсному делению 2т соответствует
угол по окружности статора 360° эл. Начала фаз А, В, С сдвинуты
относительно друг друга на 120° эл., что в данном случае составляет
треть окружности.
На рис. 19-5, а показаны направления токов в проводниках
обмотки статора для момента времени, когда i„ = /
т
и £
й
= i
c
—
==
— Токи фаз на рис. 19-5 считаются положительными, когда
они в началах фаз (проводники А, В, С) направлены за плоскость
чертежа. На рис. 19-5, б показаны направления токов для момента
времени, когда фазы токов изменились на 30° и
ia-
.VI
ib = 0; i
c
=
-
/з
Из рис. 19-5 видно, что распределение токов по окружности
статора составляет две зоны, каждая Величиной т, причем направ-
1
Согласно ГОСТ 183—66, начала фаз обмоток статора обозначаются С^Са.Сз,
их концы — соответственно С
4
, С
ь
, С», а начала фаз обмоток ротора — P
lt
Р
г
, Р
3
.
В данной книге в методических целях начала трехфазных обмоток всюду обозна-
чаются Л, В, С или а, Ь, с, а концы — соответственно X, У, Z или х, у, г.
ления токов в этих зонах противоположны. В нижней части рис. 19-5
изображены кривые распределения токов вдоль развернутого ста-
тора.
|
Из этих кривых видно, что токи распределены на поверхности
статора по синусоидальному закону.
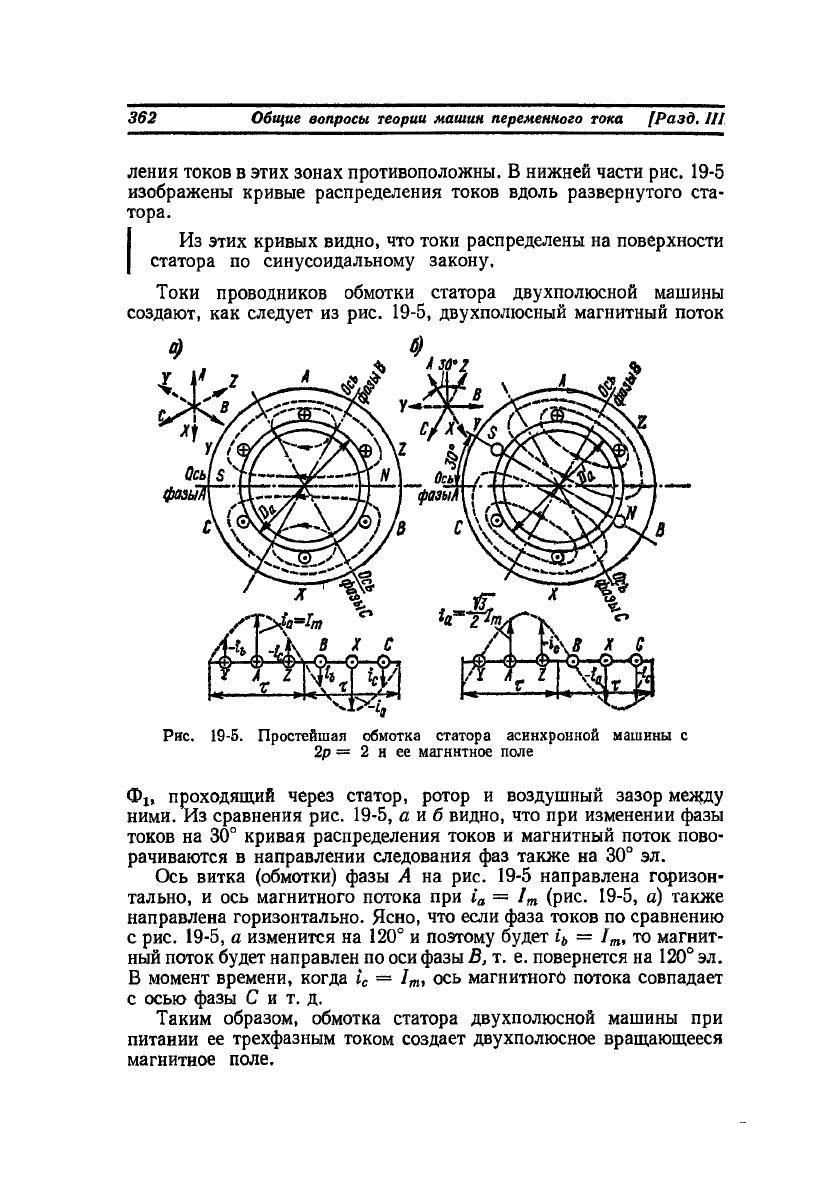
Токи проводников обмотки статора двухполюсной машины
создают, как следует из рис. 19-5, двухполюсный магнитный поток
Рис. 19-5. Простейшая обмотка статора асинхронной машины с
2р = 2 н ее магнитное поле
Фх, проходящий через статор, ротор и воздушный зазор между
ними. Из сравнения рис. 19-5, а и б видно, что при изменении фазы
токов на 30° кривая распределения токов и магнитный поток пово-
рачиваются в направлении следования фаз также на 30° эл.
Ось витка (обмотки) фазы А на рис. 19-5 направлена горизон-
тально, и ось магнитного потока при i
a
= I
m
(рис. 19-5, а) также
направлена горизонтально. Ясно, что если фаза токов по сравнению
с рис. 19-5, а изменится на 120° и поэтому будет i
b
= I
m
, то магнит-
ный поток будет направлен по оси фазы В, т. е. повернется на 120° эл.
В момент времени, когда i
c
— I
m
, ось магнитного потока совпадает
с осью фазы С и т. д.
Таким образом, обмотка статора двухполюсной машины при
питании ее трехфазным током создает двухполюсное вращающееся
магнитное поле.
|
При этом за один период изменения тока поле поворачивается
на 2 т или 360° эл.
Скорость вращения поля
n
i==fi об/сек,
где fi — частота тока статора.
Магнитное поле вращается в направлении чередования фаз
А, В, С обмотки статора. Для изменения направления вращения
поля на обратное достаточно пере-
менить местами на зажимах обмот-
ки статора концы двух проводни-
ков, идущих от питающей сети.
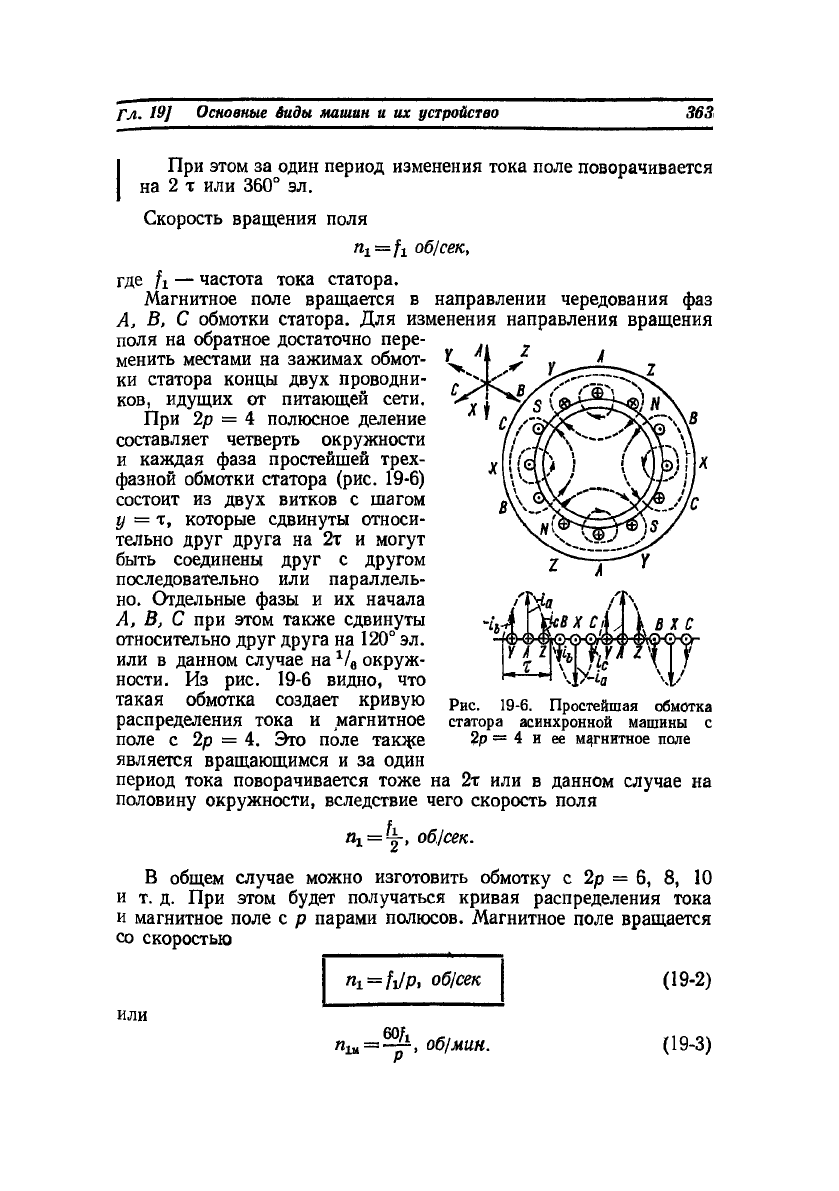
При 2р = 4 полюсное деление
составляет четверть окружности
и каждая фаза простейшей трех-
фазной обмотки статора (рис. 19-6)
состоит из двух витков с шагом
у = т, которые сдвинуты относи-
тельно друг друга на 2т и могут
быть соединены друг с другом
последовательно или параллель-
но. Отдельные фазы и их начала
А, В, С при этом также сдвинуты
относительно друг друга на 120° эл.
или в данном случае на окруж-
ности. Из рис. 19-6 видно, что
такая обмотка создает кривую
распределения тока и магнитное
поле с 2р = 4. Это поле таюре
является вращающимся и за один
период тока поворачивается тоже на 2т или в данном случае на
половину окружности, вследствие чего скорость поля
% = y, °б!
сек
-
В общем случае можно изготовить обмотку с 2р = 6, 8, 10
и т. д. При этом будет получаться кривая распределения тока
и магнитное поле с р парами полюсов. Магнитное поле вращается
со скоростью
Рис. 19-6. Простейшая обмотка
статора асинхронной машины с
2р = 4 и ее магнитное поле
ti
1
= f
1
/p, об/сек
или
60/,
п
ы
—
, об/мин.
(19-2)
(19-3)
Линейная окружная скорость вращения поля вдоль окружности
статора
V
y
- ЯDaflx = 2рт ~ = 2тfx.
(19-4)
При стандартной в СССР частоте промышленного тока f = 50 гц
получаются скорости вращения поля, указанные в табл. 19-1.
Таблица 19-1
Скорость вращения магнитного поля обмоток с различными числами
пар полюсов р при /i = 50 гц
j.
р
1
2 3
4
5 6
8
10
30
50
rii, об/мин
3000 1500 1000 750 600 500
375 300 100
60
При конструировании обмоток переменного тока стремятся
к тому (см. гл. 21), чтобы распределение индукции вращающегося
поля в воздушном зазоре вдоль окружности было по возможности
ближе к синусоидальному.
Ниже в данной главе будет предполагать, что это распределен
ление является синусоидальным.
Принцип действия асинхронной машины. Магнитный поток Ф
1(
создаваемый обмоткой статора (рис. 19-5 и 19-6), при своем вращении
пересекает проводники обмотки ротора, индуктирует в них э. д. с.
е
1а
, и если обмотка ротора замкнута, то в ней возникают токи ц,
частота которых /
2
при неподвижном роторе (л = 0) равна первичной
частоте f
v
Если обмотка ротора является трехфазной, то в ней индукти-
руется трехфазных ток. Этот ток создает вращающийся поток ро-
тора Ф
2
, число полюсов 2 р, направление и скорость вращения
которого при п = 0
«4
= ^- = — =Лх, Об/сек
такие же, как и у потока статора. Поэтому потоки Ф
х
н Ф
2
вра-
щаются синхронно и образуют общий вращающийся поток двига-
теля Ф. При короткозамкнутом роторе в его стержнях индукти-
руется многофазная система токов t
8
со сдвигом в соседних
етержняк по фазе на угол
где Z
2
— число стержней ротора. Эти токи также создают вра-
щающийся поток Ф
2
, число полюсов, направление и скорость
вращения которого являются такими же, как и у потока фазного
ротора. Поэтому и в данном случае в двигателе образуется общий
магнитный поток Ф. Ввиду существования общего вращающе-
гося магнитного поля можно рассматривать э. д. е., индуктиру-
емые в обмотках этим полем.
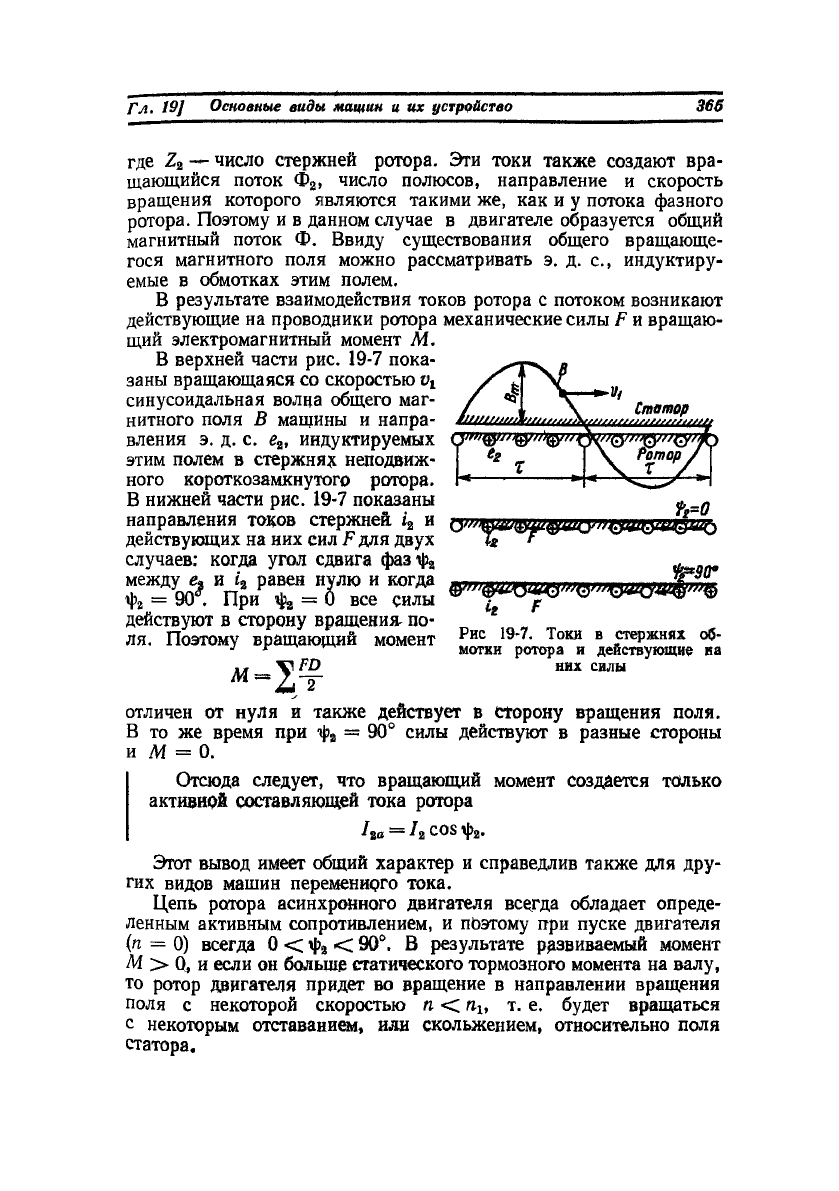
В результате взаимодействия токов ротора с потоком возникают
действующие на проводники ротора механические силы F и вращаю-
щий электромагнитный момент М.
В верхней части рис. 19-7 пока-
заны вращающаяся со скоростью v
t
синусоидальная волна общего маг-
нитного поля В мащины и напра-
вления э. д. с. е
2
, индуктируемых
этим полем в стержня* неподвиж-
ного короткозамкнутого ротора.
В нижней части рис. 19-7 показаны
направления токов стержней. i
2
и
действующих на них сил F для двух
случаев: когда угол сдвига фаз
йГ^ЭО
1
.
И
П?и
Ра
?Г=Твсе SS ^fw^rwytfli
действуют в сторону вращения- по- **
ля. Поэтому вращающий момент
Рис 19
"'-
Токи в
стержнях об-
^ мотки ротора и действующие на
,, V них силы
M==
Z/2-
отличен от нуля и также действует в сторону вращения поля.
В то же время при ^ = 90° силы действуют в разные стороны
и М = 0.
Отсюда следует, что вращающий момент создается только
активной составляющей тока ротора
%=0
•90"
Ли» —
Л
COS1
Этот вывод имеет общий характер и справедлив также для дру-
гих видов машин переменного тока.
Цепь ротора асинхронного двигателя всегда обладает опреде-
ленным активным сопротивлением, и поэтому при пуске двигателя
(п = 0) всегда 0 < \|>
2
< 90°. В результате развиваемый момент
М > Q, и если он больше статического тормозного момента на валу,
то ротор двигателя придет во вращение в направлении вращения
поля с некоторой скоростью п < п
ъ
т. е. будет вращаться
с некоторым отставанием, или скольжением, относительно поля
статора.
Относительная разность скоростей вращения поля и ротора
(19-6)
называется скольжением. Скольжение выражается также
в процентах:
so
/o
= 100s
=
rtj—n
П,
•100.
(19-6а)
Скорость ротора л, выраженная через скольжение s, согласно
формуле (19-6), равна
л = (1
—
s)
(19-7)
При пуске двигателя (п = 0) имеем s = 1, а при вращении
ротора синхронного с полем статора или, как говорят, с синхронной
скоростью (п. = Их) будет s = 0. При п = % магнитное поле ста-
тора относительно ротора неподвижно и токи в роторе индукти-
роваться не будут, поэтому М = 0 и такой скорости вращения
двигатель достичь не может. Вследствие этого в режиме двигателя
всегда 0 < /г < «х и 1 > s > 0.
При вращении ротора в сторону поля частота пересечения
полем проводников ротора пропорциональна разности скоростей
п
г
— ли частота тока в обмотке ротора
fi — p (лх — л).
(19-8)
Подставив сюда значение п из формулы (19-7) и затем значение п
х
из (19-2), получим
f
t
= sptiy = s/x,
(19-9)
т. е. вторичная частота пропорциональна скольжению.
При частоте тока f
2
< Д скорость вращения поля ротора отно-
сительно самого ротора л
2р
также меньше щ и на основании выра-
жения (19-9)
n
2p
= i = sm. (19-10)
Скорость вращения поля ротора относительно статора в соот-
ветствии с выражениями (19-7) и (19-10)
л
2
с —л + я
ар
=
(1
—sJHi+sn^/ti, (19-11)
т. е. скорость вращения поля ротора относительно статора при
любой скорости вращения ротора п равна скорости вращения поля
статора Поэтому поля статора и ротора при вращающемся
роторе также вращаются всегда синхрбнно и образуют общее
вращающееся поле.
Отметим, что представленная на рис. 19-7 картина направлений
токов и механических сил действительна и при вращении ротора,
когда 0 < /г < «1 (двигательный режим).
Если ротор асинхронной машины с помощью внешней силы
(вращающего момента) привести во вращение в направлении вра-
щения поля статора со скоростью выше синхронной (п > п
г
),
то ротор будет обгонять поле и направления индуктируемых в об-
мотке ротора токов по сравнению с изображенными на рис. 19-7
изменяется на обратные. При этом изменяется на обратные также
направления электромагнитных сил F и электромагнитного момента
М. Момент М при этом будет тормозящим, а машина будет рабо-
тать в режиме генератора и отдавать активную мощность в сеть.
Согласно выражению (19-6), в режиме генератора s < 0.
Если ротор вращать в направлении, обратном направлению
вращения поля статора (п < 0), то указанные на рис. 19-7 направ-
ления ei, i
2
и F сохраняется. Электромагнитный момент М будет
действовать в направлении вращения поля статора, но будет тор-
мозить вращение ротора. Этот режим работы асинхронной машины
называется режимом противовключения или р е-
жимом электромагнитного тормоза. В этом
режиме в соответствии с выражением (19-6) s> 1.
Более подробно режимы работы асинхронной машины рас-
сматриваются в последующем разделе. Здесь, однако, надо отме-
тить, что соотношение (19-11), как нетрудно усмотреть, сохраняется
при любом режиме работы, при любом значении s, т. е. поля статора
и ротора вращаются синхронно в любом режиме работы асинхрон-
ной машины.
§ 19-3. Устройство и принцип действия синхронной машины
Устройство и принцип действия. Статор синхронной машины
(рис. 19-8) имеет такое же устройство, как и статор асинхронной
машины. Трехфазная или в общем случае m-фазная обмотка статора
синхронной машины выполняется с таким же числом полюсов,
как и ротор, и называется также обмоткой якоря. Сердечник статора
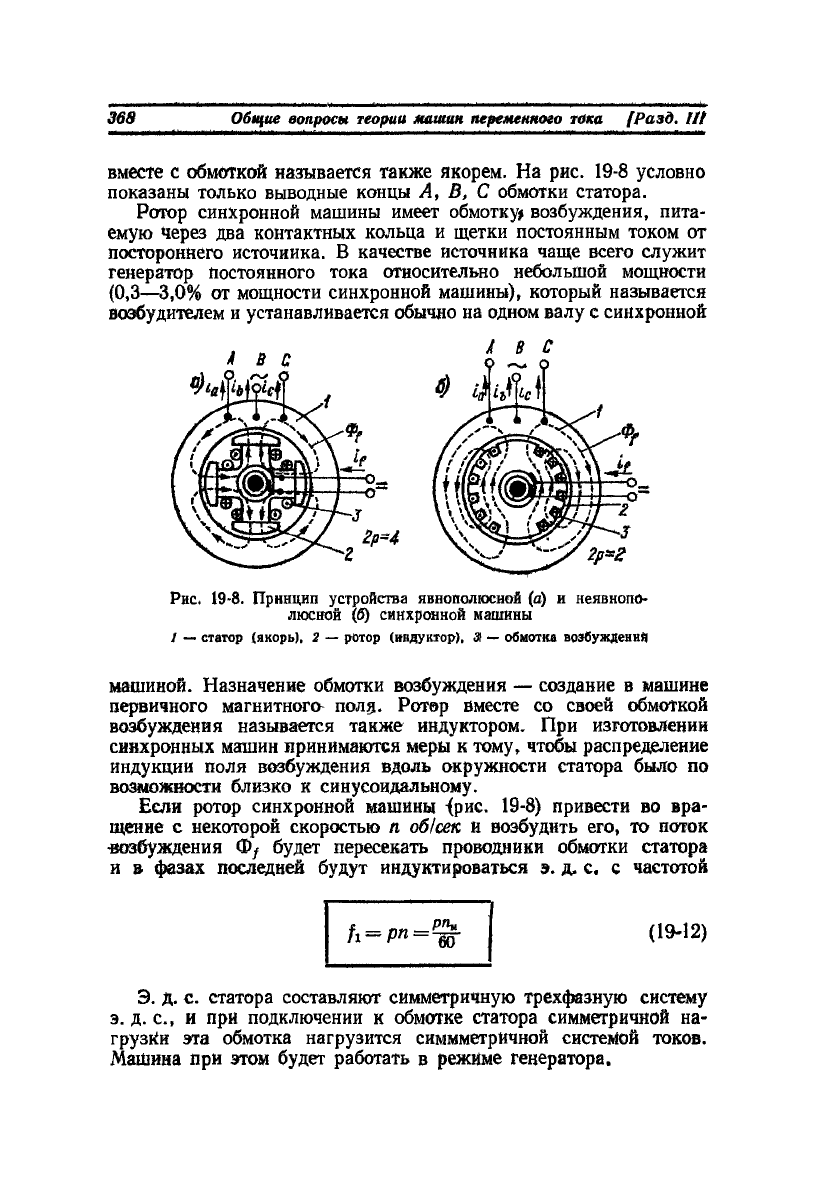
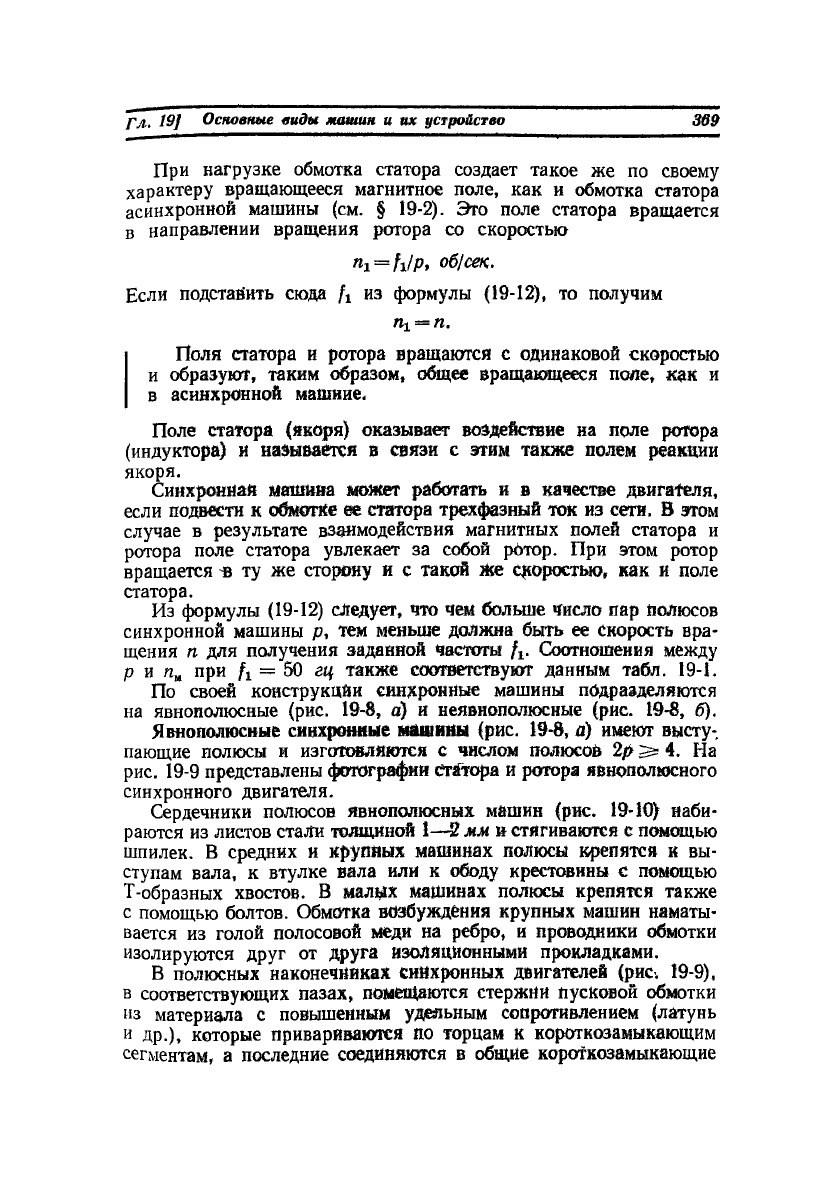
вместе с обмоткой называется также якорем. На рис. 19-8 условно
показаны только выводные концы А, В, С обмотки статора.
Ротор синхронной машины имеет обмотку» возбуждения, пита-
емую Через два контактных кольца и щетки постоянным током от
постороннего источника. В качестве источника чаще всего служит
генератор Постоянного тока относительно небольшой мощности
(0,3—3,0% от мощности синхронной машины), который называется
возбудителем и устанавливается обычно на одном валу с синхронной
Рис. 19-8. Принцип устройства явнонолюсной (а) и неявнопо-
люсной (б) синхронной машины
/ — статор (якорь), 2 — ротор (индуктор),
31
— обмотка возбуждений
машиной. Назначение обмотки возбуждения — создание в машине
первичного магнитного пол д. Ротер вместе со своей обмоткой
возбуждения называется также индуктором. При изготовлении
синхронных машин принимаются меры к тому, чтобы распределение
индукции поля возбуждения вдоль окружности статора было по
возможности близко к синусоидальному.
Если ротор синхронной машины {рис. 19-8) привести во вра-
щение с некоторой скоростью п об/сек и возбудить его, то поток
•возбуждения Фу будет пересекать проводники обмотки статора
и в фазах последней будут индуктироваться э. д. с. с частотой
fi = P
n
=
W
(19-12)
Э. д. с. статора составляют симметричную трехфазную систему
э. д. е., и при подключении к обмотке статора симметричной на-
грузки эта обмотка нагрузится симмметричной системой токов.
Машина при этом будет работать в режиме генератора.
При нагрузке обмотка статора создает такое же по своему
характеру вращающееся магнитное поле, как и обмотка статора
асинхронной машины (см. § 19-2). Это поле статора вращается
в направлении вращения ротора со скоростью
n
i = /i/Р. об!сек.
Если подстайить сюда h из формулы (19-12), то получим
= л.
Поля статора и ротора вращаются с одинаковой скоростью
и образуют, таким образом, общее вращающееся поле, как и
в асинхронной машине.
Поле статора (якоря) оказывает воздействие на поле ротора
(индуктора) и называется в связи с этим также полем реакции
якоря.
Синхронная машина может работать и в качестве двигателя,
если подвести к обмотке ее статора трехфазный ток из сети. В этом
случае в результате взаимодействия магнитных полей статора и
ротора поле статора увлекает за собой рбтор. При этом ротор
вращается ъ ту же сторону и с такой же скоростью, как и поле
статора.
Из формулы (19-12) следует, что чем больше число пар полюсов
синхронной машины р, тем меньше должна быть ее скорость вра-
щения п для получения заданной частоты Д. Соотношения между
р и п
я
при fx = 50 гц также соответствуют данным табл. 19-1.
По своей конструкции синхронные машины подразделяются
на явнополюсные (рис. 19-8, а) и неявнополюсные (рис. 19-8, б).
Явнополюсные синхронные машины (рис. 19-8, а) имеют высту-
пающие полюсы и изготовляются с числом полюсов 2р 4. На
рис. 19-9 представлены фотографии статора и ротора явнополюсного
синхронного двигателя.
Сердечники полюсов явнополюсных машин (рис. 19-10) наби-
раются из листов стали толщиной 1—2 мм и стягиваются с помощью
шпилек. В средних и крупяых машинах полюсы крепятся к вы-
ступам вала, к втулке вала или к ободу крестовины с помощью
Т-образных хвостов. В малых машинах полюсы крепятся также
с помощью болтов. Обмотка возбуждения крупных машин наматы-
вается из голой полосовой меди на ребро, и проводники обмотки
изолируются друг от друга изоляционными прокладками.
В полюсных наконечниках синхронных двигателей (рис. 19-9),
в соответствующих пазах, помещаются стержни пусковой обмотки
из материала с повышенным удельным сопротивлением (латунь
и др.), которые привариваются по торцам к короткозамыкающим
сегментам, а последние соединяются в общие короткозамыкающие