Виноградов А.Б. Векторное управление электроприводами переменного тока
Подождите немного. Документ загружается.

J
таким образом, чтобы во всех режимах работы выполнялось усло-
вие
. Очевидно, что этот метод предъявляет повышенные
требования к числу меток датчика положения, при этом он намного
проще расчетного метода и абсолютно независим от параметров меха-
нической части привода.
j
TT <<
ω
Соответствующий выбор параметров автономного фильтра обес-
печивает работоспособность и монотонный характер процессов в кон-
туре оценки
даже в условиях высокого уровня зашумленности ка-
налов измерения (вычисления) скорости и электромагнитного момен-
та.
J
Особенностью рассмотренного алгоритма оценки
является то,
что вычисление
может выполняться в обычных режимах работы
привода, то есть без внедрения в привод специального тестового сиг-
нала, применяемого, в частности, в режиме предварительной автона-
стройки с целью максимально ускорить выполнение этой процедуры.
В данном случае в процессе обработки выборок переменных алгорит-
ма оценки
автоматически выделяются такие интервалы оценки, на
которых
идентифицируема. Как правило, это динамические режи-
мы работы привода, вызываемые изменением задания по скорости. Ос-
тальные интервалы просто игнорируются.
J
J
J
J
Другой особенностью рассмотренного алгоритма является то, что
расчет параметров базового элемента механики, который может пред-
ставлять собой только часть сложной механической системы, произво-
дится абсолютно автономно. Тем самым обеспечивается простота по-
этапной настройки привода, управляющего сложной механической
системой.
12.4. Пример построения наблюдателя состояния
асинхронного электропривода с адаптивно-векторным
управлением без датчика на валу двигателя
Рассмотрим пример реализации идентификатора в бездатчиковом
асинхронном электроприводе с адаптивно-векторным управлением се-
рии ЭПВ [8, 52]. Структура самой системы управления практически
аналогична рассмотренной ранее в п.11.4 применительно к приводу
ЭПВ с датчиком угловых перемещений. Основные отличия заключа-
ются в способе вычисления переменных, необходимых для реализации
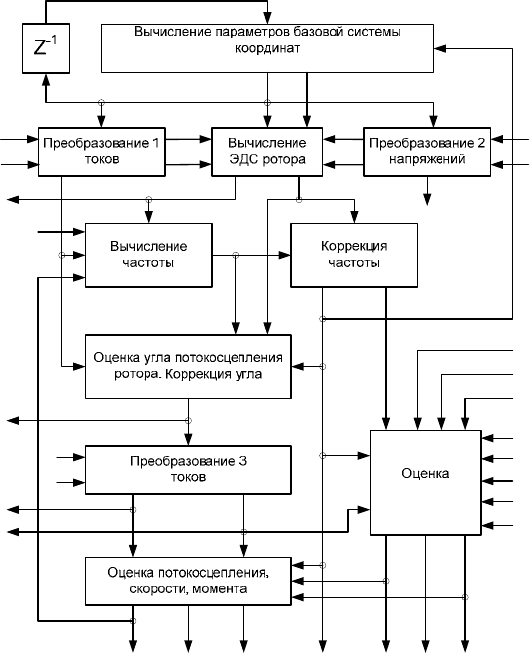
процесса управления. Структурная схема наблюдателя состояния при
-
ведена на рис.12.6.
251
Для вычисления необходимых переменных введена ортогональная
система координат (
x,y). Система (x,y) синхронно вращается с часто-
той поля, ее угловое положение не фиксируется относительно какой-
либо переменной или оси двигателя и может быть произвольным, т.е.
«плавающим». Принципиальными факторами являются не угловое по-
ложение, а синхронность системы (
x,y), которая обеспечивает в уста-
новившихся режимах работы двигателя постоянные значения вычис-
ляемых переменных, и относительно высокая ее инерционность (ско-
рость изменения углового положения должна быть ограничена), что
обеспечивает желаемую степень устойчивости цифровых вычисли-
тельных алгоритмов.
rs
R,R,
m
L
xx
ϕ
ω
,
x
ϕ
a
I
b
I
az
U
bz
U
x
I
y
I
x
U
y
U
r
E
ˆ
e
ϕ
e
ω
ˆ
ψ
ω
ˆ
ω
δ
i
ϕ
uz
ϕ
uz
ϕ
ψ
ϕ
ˆ
d
I
q
I
x
ω
0s
R
0r
R
0m
L
Rmax
ω
Rmin
ω
Lmax
ω
Lmin
ω
ψ
ω
ˆ
m
L
ˆ
s
R
ˆ
r
R
ˆ
r
Ψ
ˆ
r
ω
ˆ
M
ˆ
a
I
b
I
R
I
min
Рис.12.6. Структурная схема наблюдателя состояния
В качестве частоты вращения системы координат (
x,y) могут при-
ниматься переменные, величина которых в установившихся режимах
252
работы равна частоте вращения поля, в частности, частоты вращения
векторов потокосцеплений, отфильтрованные значения частоты вра-
щения векторов напряжения или тока статора. В рассматриваемом ча-
стном случае частота вращения системы (
x,y) принята равной оценке
частоты вращения вектора потокосцепления ротора
ψ
ω
ˆ
. Угловое по-
ложение и частота системы координат на
-м интервале расчета пе-
ременных наблюдателя вычисляются по выражениям
k
,
;
ˆ
0,1,,
1,,
T
kxkxkx
kkx
ωϕϕ
ω
ω
ψ
+=
=
−
−
(12.15)
где
– интервал расчета переменных наблюдателя.
0
T
Преобразование 1 токов и преобразование 2 напряжений из систе-
мы координат (a,b,c) в систему координат (x,y) осуществляются по
выражениям
;)]cos()
3
cos([
3
2
;)]sin()
3
sin([
3
2
,,
,,
kxbkxby
kxbkxax
III
III
ϕ
π
ϕ
ϕ
π
ϕ
++=
++=
(12.16)
,)]cos()
3
cos([
3
2
;)]sin()
3
sin([
3
2
1,1,
1,1,
−−
−−
++=
++=
kxbzkxazy
kxbzkxazx
UUU
UUU
ϕ
π
ϕ
ϕ
π
ϕ
(12.17)
где
– токи и заданные напряжения статора фаз и .
bzazba
UUII ,,, a b
Использование для преобразования напряжений углового положе-
ния системы координат на предыдущем интервале расчета (
1, −kx
ϕ
)
связано с наличием запаздывания в измерении тока по отношению к
формированию напряжения. Переход в полярную систему координат,
неподвижную относительно статора, дает угловые положения векто-
ров заданного напряжения и тока статора (
iuz
ϕ
ϕ
, ).
Расчет ЭДС ротора осуществляется на основе цифрового решения
уравнений статорной цепи АД, записанных в системе координат (
x,y):
253
,
;
ryxxs
y
sysy
rxyx
s
x
sxsx
EIL
dt
dI
LIRU
EIL
dt
dI
LIRU
+++=
+−+=
ωσσ
ωσσ
(12.18)
где
rx
r
m
x
ry
r
m
ryry
r
m
x
rx
r
m
rx
L
L
dt
d
L
L
E
L
L
dt
d
L
L
E
Ψ+
Ψ
=Ψ−
Ψ
=
ωω
; –
проекции вектора ЭДС ротора в системе координат (
x,y) (
ryrx
Ψ
Ψ
, –
проекции вектора потокосцепления ротора в системе координат (
x,y));
– активное сопротивление статора;
s
R
rs
m
LL
L
2
1 −=
σ
– коэффициент
рассеяния (
– индуктивности взаимная, статора, ротора).
rsm
LLL ,,
Преобразование в полярную систему координат, непод-
вижную относительно статора, дает оценки модуля и углового поло-
жения вектора ЭДС ротора (
).
ryrx
EE ,
er
E
ϕ
,
ˆ
Вычисление модуля первой оценки частоты вращения вектора по-
токосцепления ротора выполняется в предположении, что трансфор-
маторная составляющая ЭДС ротора
dt
d
L
L
r
r
m
Ψ
r
пренебрежимо мала в
сравнении с ЭДС вращения
r
r
m
L
L
j
Ψ
r
ψ
ω
, по выражению
r
r
m
r
e
E
L
L
Ψ
=
ˆ
ˆ
ˆ
ω
,
(12.19)
где
– оценка потокосцепления ротора.
r
Ψ
ˆ
Знак частоты вращения вектора потокосцепления ротора вычисля-
ется по информации об угловых положениях векторов заданного на-
пряжения и тока статора, модуле частоты вращения на текущем и пре-
дыдущих интервалах расчета и знаке частоты вращения на предыду-
щем интервале расчета.
254
Коррекция оценки частоты вращения вектора потокосцепления
ротора по
фактической мгновенной частоте вращения вектора ЭДС ро-
тора, вычисленной из его углового положения
e
ϕ
, выполняется с це-
лью устранить в оценке частоты ошибку, вызванную структурной и
параметрической неадекватностью модели статорной цепи, погрешно-

стями измерительных каналов и приближенным характером вычисле-
ний. Коррекция выполняется на основе интегрального регулятора час-
тоты, коэффициент которого устанавливается исходя из желаемого ха-
рактера движения ошибки.
Оценка углового положения вектора потокосцепления ротора
ψ
ϕ
ˆ
выполняется на основе информации об угловых положениях векторов
ЭДС ротора, тока статора и оценок частоты вращения вектора пото-
косцепления ротора
ψ
ω
ω
ˆ
,
ˆ
e
. С учетом пренебрежения малой величи-
ной трансформаторной ЭДС угловые положения векторов ЭДС и по-
токосцепления ротора отстоят друг от друга на угол
2
π
± . Знак опре-
деляется направлением вращения векторов (знаком частоты). На ма-
лых частотах ЭДС ротора стремится к нулю, и, следовательно, диапа-
зон вычисления положения вектора ЭДС с заданной точностью огра-
ничен некоторым минимальным значением частоты
min
ψ
ω
. Чтобы
обеспечить работоспособность наблюдателя состояния на частотах,
меньших
min
ψ
ω
, осуществляется переход от ориентации по вектору
ЭДС к ориентации по вектору тока статора. Алгоритм вычислений ор-
ганизован таким образом, что этот переход осуществляется только в
режимах малых скольжений, т.е. близких к холостому ходу двигателя.
В этом случае положение вектора тока статора оказывается близким к
положению вектора потокосцепления ротора и
переход на ориентацию
по току не приводит к большим ошибкам в точности вычисления пе-
ременных.
Дополнительная коррекция оценки углового положения вектора
потокосцепления ротора выполняется в целях минимизации влияния
на точность вычисления переменных двигателя ошибок, вызываемых
следующими факторами:
1)
малыми динамическими отклонениями разности угловых положе-
ний векторов ЭДС и потокосцепления ротора от величины
2
π
± ;
2)
динамическими ошибками вычисления вектора ЭДС ротора;
3)
наличием скачков в оценке положения вектора потокосцепления,
вызванных изменением структуры наблюдателя состояния в об-
ласти малых частот при переходе с ориентации по вектору ЭДС к
ориентации по вектору тока.
Коррекция выполняется на основе П-регулятора положения. Па-
раметры регулятора выбираются исходя из желаемого характера дви-
жения ошибки между нескорректированным и скорректированным
значениями углового положения вектора потокосцепления ротора. Для
255

устранения возможности накопления больших ошибок вычисления уг-
ла потокосцепления при переходных процессах «в большом» в кор-
рекцию угла введен алгоритм безынерционного устранения ошибок,
превышающих определенное пороговое значение.
Преобразование токов статора из системы координат (
) в
ортогональную систему координат (
d,q), ориентированную по оценке
углового положения вектора потокосцепления ротора, осуществляется
по выражениям
cba ,,
;)]
ˆ
sin()
3
ˆ
sin([
3
2
ψψ
ϕ
π
ϕ
bad
III ++=
.)]
ˆ
cos()
3
ˆ
cos([
3
2
ψψ
ϕ+
π
+ϕ=
baq
III
(12.20)
Для оценки параметров двигателя, к изменениям которых привод
оказывается наиболее чувствительным, а именно взаимной индуктив-
ности, активных сопротивлений статора и ротора, используется сигнал
невязки
между скорректированным значением частоты вращения
вектора потокосцепления ротора
ω
δ
ψ
ω
ˆ
и ее первой оценкой
e
ω
ˆ
. В каче-
стве исходных значений вычисляемых параметров (
) ис-
пользуются значения, определенные в результате выполнения проце-
дуры автонастройки привода или введенные пользователем на основе
паспортных данных двигателя. Так как невязка одна, а оцениваемых
параметров три, то для обеспечения сходимости оценок к истинным
значениям параметров алгоритмы вычисления оценок разнесены во
времени и в зависимости от режима работы привода (уровня
частоты и
нагрузки). С этой целью в блок оценки параметров вводится дополни-
тельная информация о пределах функционирования алгоритмов оцен-
ки (
000
,,
rsm
RRL
RLLRR
I
minminmaxminmax
,,,,
ω
ω
ω
ω
) и переменные, характеризую-
щие частоту и нагрузку. Для оценки
использован интегральный
регулятор, для оценки
– пропорционально-интегральный. На-
стройки регуляторов произведены таким образом, чтобы обеспечить
желаемый характер движения ошибок оценки параметров. Оценка
температурного изменения
выполняется косвенным образом по
оценке температурного изменения активного сопротивления статора.
s
R
m
L
r
R
Оценка потокосцепления ротора, скорости ротора и электромаг-
нитного момента осуществляется в соответствии с уравнениями
256
;
ˆˆ
ˆ
ˆ
dmr
r
r
IL
dt
d
T +Ψ−=
Ψ
);
ˆˆ
ˆ
ˆ
(
1
ˆ
r
q
r
m
p
r
I
T
L
Z
Ψ
−
=
ψ
ωω
,
ˆ
ˆ
ˆ
2
3
ˆ
qr
r
m
p
I
L
L
ZM Ψ=
(12.21)
где
– число пар полюсов двигателя;
p
Z
0
0
ˆ
ˆ
m
m
rr
L
L
LL
=
;
r
r
r
R
L
T
ˆ
ˆ
ˆ
=
–
оценки индуктивности и постоянной времени ротора.
12.5. Бездатчиковое определение скорости в асинхронном
электроприводе
Бездатчиковое определение скорости может выполняться с ис-
пользованием различных методов, сложность которых в значительной
степени определяется требуемым диапазоном регулирования привода
и требованиями к точности измерения скорости. В [49] приведена
классификация, в соответствии с которой методы определения скоро-
сти асинхронного двигателя подразделяются на пять групп.
К первой группе относятся неадаптивные методы, в
которых ско-
рость определяется непосредственно через измеряемые напряжение и
ток статора, и методы, основанные на определении скорости через рас-
считываемые в схеме частоты напряжения питания и роторной ЭДС.
Вторую группу составляют адаптивные методы. Они ориентированы
на замкнутые системы регулирования электропривода, в которых
адаптация применена для повышения точности измерительной систе-
мы. В
третью группу входят методы, основанные на конструктивных
особенностях двигателя и использующие, например, информацию, ко-
торую несет в себе кривая намагничивания машины. Четвертая груп-
па – это нелинейные методы, базирующиеся на теории нейронных це-
пей, а последняя, пятая, группа – группа методов, использующих для
повышения точности дополнительные высокочастотные сигналы или
другую дополнительную информацию.
Рассмотрим наиболее простые неадаптивные методы, основанные
на формах математического описания асинхронных двигателей, из-
вестных из предыдущих разделов.
257

Для асинхронного двигателя с короткозамкнутым ротором урав-
нения, записанные в векторной форме в неподвижной системе коорди-
нат
),(
β
α
, имеют вид
dt
d
IRU
s
sss
βα
βαβα
−
−−
Ψ
+=
r
rr
;
(12.22)
βα
βα
βα
ω
−
−
−
Ψ−
Ψ
+=
rp
r
rr
jZ
dt
d
IR
r
r
r
0 ;
(12.23)
βαβαβα
−−−
+=Ψ
rmsss
ILIL
r
r
r
;
(12.24)
βαβαβα
−−−
+=Ψ
rrsmr
ILIL
r
r
r
.
(12.25)
Наличие скорости
ω
в уравнении (12.23) позволяет определить ее
значение через значения других переменных. Далее рассматривается
вариант схемы бездатчикового измерения скорости (рис.12.7), реали-
зуемый в неподвижной системе координат [34].
В схеме на основе измеряемых напряжения и тока статора рассчи-
тываются частота напряжения питания и частота роторной ЭДС. На
основании этого скорость двигателя определяется следующим обра-
зом:
pp
Z/)(
эл0
ω
ω
ω
−= .
(12.26)
Входными величинами для схемы являются проекции пространст-
венных векторов
s
U
r
и
s
I
r
на оси неподвижной системы координат
),(
β
α
, связанной со статором.
Записывая систему уравнений (12.22) – (12.25) относительно век-
торов тока статора и потокосцепления ротора и выражая потокосцеп-
ление ротора, получим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=Ψ
−
−−−
dt
Id
LIRU
L
L
p
s
ssss
m
r
r
βα
βαβαβα
σ
r
rrr
1
,
где . dtdp /=
Или в виде проекций на оси системы координат
⎟
⎠
⎞
⎜
⎝
⎛
−−=Ψ
dt
dI
LIRU
L
L
p
s
ssss
m
r
r
α
ααα
σ
1
;
(12.27)
258

259
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=Ψ
dt
dI
LIRU
L
L
p
s
ssss
m
r
r
β
βββ
σ
1
.
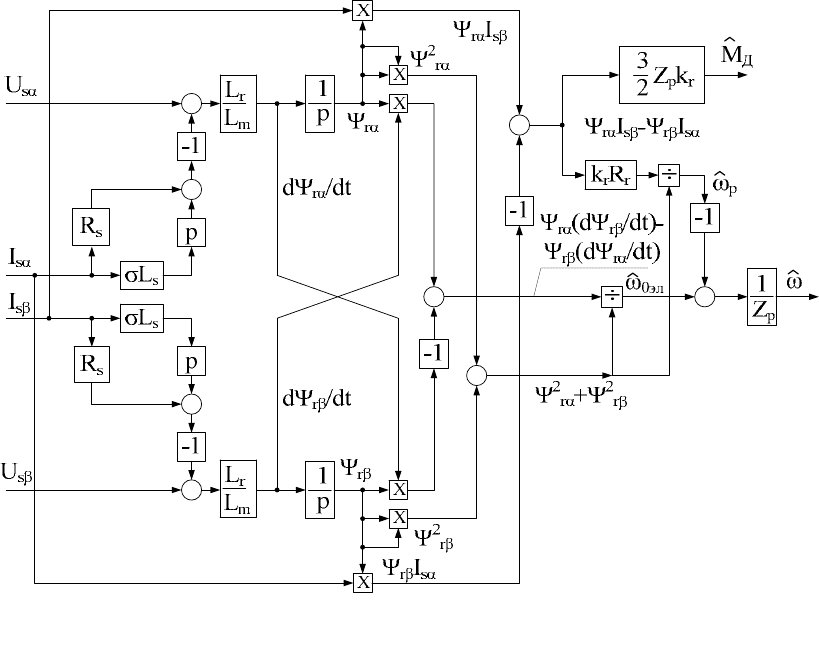
Рис.12.7. Схема бездатчикового определения скорости привода с асинхронным двигателем
260