Vij D.R. Handbook of Applied Solid State Spectroscopy
Подождите немного. Документ загружается.

A typical configuration would be a 50-mm diameter cylinder with
0.25-mm thick beryllium side entry and exit windows, 25 mm in diameter,
and a Xe+3% CO
2
fill at one atmosphere. The thin Be windows admit the
14.4-keV
J without loss and the 1 atm Xe fill has enough stopping power to
efficiently collect them without providing too much efficiency for the much
more intense 122-keV
J-photons, which mostly exit undetected through the
second Be window. A thin (~1 mm) plexiglass filter over the detector window
can also reduce detection of the Co and Fe K
D
and count rates on the 14.4-keV
J of 5 to 10 u 10
3
s
–1
can be obtained without saturating the electronics.
A Kr+3% CO
2
fill is also very popular as it yields even lower sensitivity to
the higher energy
J-photons and so reduces background rates. However, the
14.4-keV
J is above the Kr K-edge and a significant fraction of the Mössbauer
J-photons appear in the 1.8 keV “escape” peak, necessitating the use of an
additional single channel analyzer if good efficiency is to be obtained. The
fluorescence yield of Kr is also poor, with only about 50% of the absorbed
J-photons yielding a photoelectron that can be detected.
The increased high energy sensitivity of NaI(Tl) or HPGe detectors means
that their response is dominated by the 136-keV and 122-keV
J-photons.
Counting rates are more limited and increased backgrounds from Compton
scattering of higher energy
J lead to very poor performance in
57
Fe Mössbauer
spectroscopy.
Proportional counters with a 1 atm Ar+3% CO
2
fill are commonly used to
detect the 8.4-keV
169
Tm Mössbauer J, and can also be used for X-ray
backscatter (XBS, see below) work with the ~6.4-keV Fe-K
D
X-ray. In
principle, a 2-atm Xe+10% CO
2
fill can be used for either
151
Eu or
119
Sn
Mössbauer spectroscopy, but freedom from intense higher energy
J
contamination and the availability of more efficient detectors for the 21-keV
and 24-keV
J make NaI(Tl) or HPGe better choices for these Mössbauer
resonances.
5.2.2.2 NaI(Tl) Scintillation Detectors
For many applications in the 20–100 keV range, a thallium-activated sodium
iodide scintillation detector is a good choice. A 0.25-mm thick beryllium or
25-Pm thick aluminium entry window minimizes attenuation losses above
20 keV, and a crystal 6–8 mm thick is sufficient to give over 95% efficiency
out to 100 keV (there are no useful Mössbauer resonances beyond this
energy). These detectors actually give slightly poorer energy resolution than
proportional counters (~50% at 6 keV and ~20% at 90 keV) but can be used at
similar count rates. The presence of a photomultiplier tube behind the crystal
does make these detectors significantly heavier and more fragile than the gas-
filled proportional counter. The gain of the photomultiplier can also be
5.2 Methodology
217
5. Mössbauer Spectroscopy
affected by stray magnetic fields and while they are typically manufactured
with P-metal shielding, they should be protected from external magnetic
fields.
5.2.2.3 High Purity Germanium (HPGe) Detectors
HPGe solid state detectors exhibit energy resolutions of < 0.5%, with better
than 95% efficiency from 6 keV to 200 keV. When equipped with a pulsed
optical feedback network to stabilize the detector bias voltage, count rates in
excess of 10
5
s
–1
are readily achievable. This performance comes at a
significant price, with a good HPGe detector costing 10–20 times that of a
NaI(Tl) scintillation detector. The detector must also be continuously cooled
with liquid nitrogen during operation, adding a bulky Dewar assembly to the
unit. However, the detector can be allowed to warm up, and may be stored at
room temperature when not in use, unlike Si(Li) detectors, which would be
damaged by such treatment. The comparable performance and increased
convenience has led to HPGe detectors replacing Si(Li) units for most
applications.
Few Mössbauer resonances demand the performance of a HPGe detector
and for the commonly used isotopes such a detector is either inappropriate
(
57
Fe) or expensive overkill (
151
Eu and
119
Sn). Where HPGe detectors are
essential is in work with noncommercial Mössbauer sources. Neutron
activation or proton irradiation, even of sources prepared with isotopically
separated starting materials, inevitably leads to the presence of one or more
unwanted radioisotopes. Even when the source is effectively pure, J-energies
tend to be higher than the 24-keV
119
Sn resonance, and copious amounts of
fluorescence X-rays can accompany the Mössbauer
J. In this situation, good
resolution is needed to isolate the Mössbauer energy from surrounding
X-rays, and excellent rate capability permits operation with high-activity
sources to compensate for low f-factors without saturating the detector. Count
rates of 5 u 10
4
s
–1
on the Mössbauer J in the presence of comparable rates in
non-Mössbauer X-rays are routinely encountered.
5.2.3 Data Collection
Collecting a Mössbauer spectrum requires the proper synchronization of two
sets of signals: the motion of the drive and the detection of
J-photons. The
charge pulses generated in the detector by the stopping of a
J are shaped and
amplified in a pre-amplifier and amplifier. The voltage pulses are then passed
through a single-channel analyzer (SCA), where those within a certain
amplitude range, chosen to correspond to the J-energy of interest, generate a
TTL pulse, while those outside the selected range are rejected. The pre-
amp/amp/SCA chain is available as a dedicated commercial Mössbauer
218
system, or can be assembled from individual nuclear instrumentation modules
(NIM). Costs are comparable and both approaches have advantages. A
dedicated unit is simpler to operate, but more difficult to troubleshoot when
problems develop, whereas a NIM-based system requires a larger initial
investment of time to set up, but it is more flexible and far simpler to
troubleshoot.
The stream of TTL pulses being generated by the SCA must now be
synchronized with the motion of the Mössbauer drive. A typical arrangement
is as follows. The velocity waveform to which the drive’s motion is slaved is
produced digitally by a function generator that also provides two additional
data streams: sweep START and channel advance (CHA). These are used to
control an array of counters in a multichannel scaler (MCS), typically an add-
on card for a PC. The START pulse resets the multichannel scaler and opens
the first data register to receive counts. Any TTL pulses that arrive from the
SCA while the register is open are added to the current contents. When each
successive CHA pulse arrives, the current register is closed, and the next one
is opened. In this way, the arriving TTL pulses are placed in a register that
corresponds to a specific velocity of the drive. When the complete waveform
has been generated (commonly 512 or 1024 channels), a new START is
issued and the cycle repeats. At velocities corresponding to absorption lines in
the sample, the count rate will be slightly lower and those data channels will
increase more slowly. Over time, a Mössbauer spectrum develops.
Once the spectrum is of sufficient quality (determined by visual inspection,
predetermined time, or by evaluation of intermediate fits carried out during
the data collection) collection is halted and the spectrum is transferred and
folded ready for analysis. Since the motion of the drive is necessarily cyclic,
every velocity occurs twice during the waveform, but the two copies are not
identical. The source is slightly closer to the detector during one half of the
cycle than the other, leading to a higher average count rate. Indeed, since the
source position changes continuously during the cycle, so does the count rate,
and the background in the absence of a sample exhibits an approximately
sinusoidal modulation with an amplitude that can exceed 1% for set ups with
short source-detector distances. A second problem arises through mechanical
lags in the drive motion, which can be as much as 1%, and lead to the center
of symmetry of the actual source motion being offset from the center of the
intended velocity waveform. Folding the data greatly reduces the effects of
position-induced count rate variations, but this must be done with care to
avoid distortions due to mechanical phase shifts. There are three common
strategies:
Auto-fold. It is possible to arrange for some multichannel scalers to count
down through their registers as well as up. Therefore, once the drive reaches
its maximum velocity and starts back down, the MCS can reverse its sweep
through the registers. This approach can mask any number of failures in the
instrumentation and runs the risk of destroying the spectrum as it is collected
5.2 Methodology
219
5. Mössbauer Spectroscopy
while only avoiding a simple arithmetic manipulation that is trivially carried
out after the collection is complete.
Fold before analysis. This is the simplest method. The center of symmetry (of
the spectrum) can be determined either by fitting the two halves, seeking the
maximum correlation between them, or by simply observing the folding point
at which the maximum signal is obtained. Some care needs to be exercised
when folding at noninteger points as some form of interpolation of the data
will be needed, and this will make the actual data distribution non-Poisson
and can affect subsequent data analysis. Folding the data after collection
greatly reduces the background variations due to source motion and has the
added benefit that it is nondestructive: the unfolded data are still available for
refolding. Unexpected variations in folding point or poor overlap between the
two halves are immediate indications that all is not well with the
spectrometer.
Fit the unfolded halves together with a background term. A final option is to
not fold at all, but simply fit the duplicated half and include a symmetry-
center variable explicitly in the fit. Some form of background function must
also be included in the fit. The data can be folded for presentation and
interpolation-included distortions of the counting statistics are irrelevant as
they do not affect the analysis.
5.2.4 Calibration
Accurate calibration of the spectrometer is critical and it should provide three
pieces of information: (i) velocity-zero (ii) the velocity scale, either V
max
or
the velocity step per channel, and (iii) confirmation of drive linearity and
performance. Ideally, calibration is achieved by measuring a standard sample,
but various forms of laser interferometers are also popular.
A thin foil (< 25 Pm) of iron metal provides an excellent calibration
standard for
57
Fe Mössbauer spectroscopy as the line positions have been
determined absolutely (see Section 5.1) and the material is extremely stable.
The 6-line magnetic pattern also provides a convenient drive linearity test. All
57
Fe isomer shifts are quoted relative to the center of the iron metal spectrum
at room temperature. Hematite (D-Fe
2
O
3
) can be used to extend the velocity
range out to r10 mm/s, and with confirmed linearity, velocity ranges two or
three times larger than this can be safely used. While calibrating with a
standard sample does use up counting time that could be spent measuring
“real” samples, it is an essential step and also provides a complete check of
the spectrometer performance in the actual mode that it used to acquire data.
Every component of the spectrometer is tested together, and problems that
might be missed on isolated tests can be caught on a clean standard long
before they distort the results on a more complex material.
220
For those not working with
57
Fe, calibration standards are less clear. The
simplest approach is to mount a
57
Co source on the back of the drive and use
iron metal as a calibrant, with a second standard being used to set velocity-
zero for the isotope being studied (e.g., BaSnO
3
is a common choice for
119
Sn
work). This procedure works well if
57
Fe Mössbauer is also being used in the
same laboratory and if the velocity scales being used are compatible. Other
standards that have been used include ErFe
2
(r 60 mm/s, for
166
Er), Dy metal
(r 200 mm/s, for
161
Dy) and TmFe
2
(r 800 mm/s, for
169
Tm; see Figure 5.18).
Laser interferometers are a popular and versatile alternative to calibration
that uses a standard sample. They can be run in parallel and so do not cost
counting time, and they have a much wider velocity range. However, they
only provide information on the motion of the reflecting surface mounted on
the back of the drive, and strictly speaking do not measure the actual relative
motion of the source-sample pair. Furthermore, laser interferometers cannot
be used to check source linewidths, nor do they provide any information on
the performance of the nuclear counting electronics. Laser interferometers
employ a Michelson interferometer to count the number of fringes that pass
during the opening of each velocity channel, and knowing the time each
channel is open, the average velocity of each channel is readily calculated.
However, for almost all Mössbauer applications, the motion of the drive
during any given step is comparable to the wavelength of the laser light. For
example, at a V
max
of 10 mm/s working at 30 Hz and 512 data channels, the
drive moves a maximum of about 650 nm over one channel. Coupled with the
highly stable, deterministic motion of the drive, a He-Ne laser (O = 633 nm)
signal shows large blocks of channels with zero, one, and two counts. Various
schemes for introducing position noise have been employed to smooth out this
behavior, but low velocity calibrations are not ideal, and they are best at
higher velocities (> 50 mm/s).
Mechanical recoil can also affect calibrations. While the mass of the
moving coil and source assembly is generally kept as small as possible, it
cannot be made zero and its motion necessarily induces some recoil of the
drive. For conventional transmission work, the effects of this recoil can be
minimised by rigid coupling of the drive to a heavy mount; however when
one works with a cold-source system, or with the source and sample in a
magnet cryostat, the driven mass increases and rigid mounting becomes more
problematic. Elasticity in the long coupling rod between the drive and source
can also affect the actual motion of the source. In such situations, an
interferometric measure of the drive motion may not provide an accurate
measure of the source-sample relative motion. Deviations of 5% are not
uncommon and cross-checking with one or more standard samples is
essential.
5.2 Methodology
221
5. Mössbauer Spectroscopy
5.2.5 Sources
Commercial sources are currently available for three of the most commonly
used Mössbauer resonances:
57
Fe,
119
Sn, and
151
Eu.
57
Fe Mössbauer sources
are prepared by diffusing
57
Co into a cubic metal matrix (commonly rhodium)
to give a single-line source with a good recoil-free fraction. The half-life is
271 days and initial activities of 10–50 mCi (300–2000 MBq) provide useful
count rates for two or more years (depending on the application). One side
benefit is that the source can be retired to an undergraduate teaching lab and
be used for teaching experiments for another year of use. Observed linewidths
for a thin iron metal absorber are around 0.113 mm/s (half-width at half
maximum–HWHM).
119
Sn is unusual in that the parent for the decay is a long-
lived excited state of
119
Sn, usually designated
119m
Sn, as shown in
Figure 5.10.
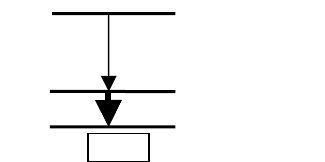
Figure 5.10 Decay scheme associated with
119
Sn Mössbauer spectroscopy.
As the parent and daughter are chemically identical they cannot be
separated. It is essential therefore that sources be prepared from fresh
119m
Sn,
as a build-up of
119
Sn in the source leads to resonant self-absorption, which
can cause a significant reduction in source f-factor (recoil-free
J are
preferentially reabsorbed in the source, while those from recoil events escape)
and an increase in linewidth (
Jfurther from the center of the Mössbauer line
are less likely to be reabsorbed in the source and so are over-represented in
the emission spectrum). A source that starts out bad, can only get worse as
ground state
119
Sn continues to accumulate. The standard matrices are CaSnO
3
and BaSnO
3
. The parent half-life is ~290 days so the working lifetime of a
source is comparable to that of
57
Co sources. The J is emitted quite efficiently,
so activities in the 2–10 mCi (70–400 MBq) range yield acceptable to high
counting rates. Typical source linewidths observed with a BaSnO
3
absorber
are ~0.42 mm/s (HWHM).
Sources for
151
Eu Mössbauer spectroscopy usually employ
151
Sm in a SmF
3
matrix (Figure 5.11). Linewidths of 0.12 mm/s are typical. The parent half-life
is 87 years, so apart from the inevitable line broadening and decline in f-factor
associated with the build-up of
151
Eu in the source, a good
151
Eu Mössbauer
source will last a researcher’s career. Unfortunately, the
J emission is
extremely inefficient. Only about 1% of the electron capture decays of the
parent
151
Sm actually lead to a
151
Eu nucleus in the 21.5-keV Mössbauer state.
119
Sn
23.9 keV, 18 ns
0 keV 1/2
3/2
11/2
222
89.5 keV, 293 d
Internal conversion dominates the subsequent decay process so that only
about 1% of the transitions are radiative. The inefficiency of the decay
process means that significant source activities are essential to attain useful
count rates. Even with 100 mCi (4 GBq) counting rates are of order 200 s
–1
.
High activity sources are not currently available, with 30 mCi (1 GBq) being
the limit. Such a source would not lend itself to high throughput experiments.
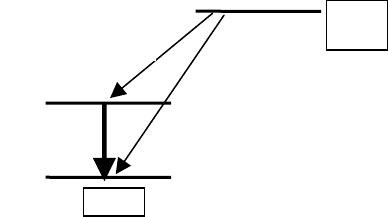
Figure 5.11 Decay scheme associated with
151
Eu Mössbauer spectroscopy.
5.2.5.1 Nonstandard Resonances
Many Mössbauer resonances are underused because sources are not readily
available. The parent isotope is often short-lived and some investment in
source materials preparation is needed and isotopically separated starting
materials must be used. In addition, higher
J energies mean that useful
recoil-free fractions are only obtained with both the source and the sample at
low temperatures (typically below 50 K). We consider several examples here.
197
Au: The principal problems with this transition are the short half-life of
the parent
197
Pt (19 hours) and interference between the Mössbauer J at
77.35 keV and the K
E
X-rays from Au (77.984 keV). The former demands
nearby access to a nuclear reactor while the latter must be accepted. Source
preparation is relatively easy as
196
Pt is available as a metal and can be
irradiated directly. Neutron fluxes of 3 u 10
11
cm
–2
s
–1
are sufficient to obtain
useful source activities.
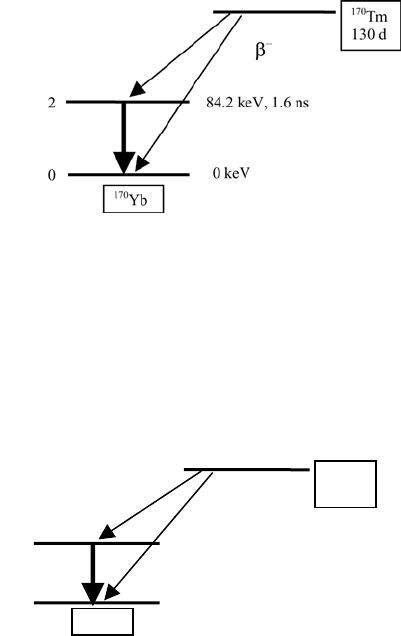
170
Yb: The radioactive parent (
170
Tm) is obtained by neutron activation of
169
Tm which is, conveniently, the only naturally occurring isotope of thulium
(Figure 5.12). A 10 wt.% alloy of thulium in aluminium (a mixture of TmAl
2
in an Al matrix) makes a convenient single-line source. The 130-day half-life
makes it a relatively convenient source to work with, but it demands higher
neutron fluxes so it can be activated in a reasonable time (15 h at 3 u 10
13
cm
–2
s
–1
works well). The 84.2-keV Mössbauer J is well separated from the
many X-rays emitted by the source.
151
Sm
87 y
151
Eu
21.5 keV, 9.7 ns
0 keV
5/2
7/2
1%
99%
5.2 Methodology
223
5. Mössbauer Spectroscopy
Figure 5.12 Decay scheme associated with
170
Yb Mössbauer spectroscopy.
166
Er: This resonance is also accessed by activation of a single-isotope
precursor, in this case
165
capture cross-section make high activity sources possible. Overnight
irradiation at 3 u 10
11
cm
–2
s
–1
works well, but the reactor facility needs to be
fairly close by. A standard source matrix is Ho
0.4
Y
0.6
H
2
which remains unsplit
down to about 5 K. At lower temperatures, the source needs to be heated to
prevent magnetic relaxation broadening the emission line.
Figure 5.13 Decay scheme associated with
166
Er Mössbauer spectroscopy.
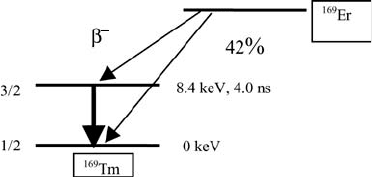
169
Tm: There are many problems limiting access to this very useful
Mössbauer resonance. The source,
169
Er, must be prepared by neutron
activation of isotopically pure
168
Er in order to avoid the presence of
interfering radiations (Figure 5.14). As with
170
Yb, the best source matrix is
Al (+10 wt.%
168
Er). Unfortunately
168
Er is only available as an oxide, and the
reduction of
168
Er
2
O
3
and subsequent alloying with aluminium is an
interesting challenge. The capture cross-section is small and the source must
be extremely thin to permit the 8.4-keV Mössbauer
J to escape, thus
necessitating long irradiations in order to attain useful source activities.
5.2.5.2 Environments
Mössbauer spectroscopy is a well-established nuclear technique in solid state
physics, therefore it is not the technique itself that is central to Mössbauer
work, but rather the samples and the environments to which they are exposed.
165
Ho
27 h
166
Er
80.6 keV, 1.9 ns
0 keV
0
2
Ho (Figure 5.13). The short half-life (~27h) and large
224
57
Fe,
119
Sn,
151
Eu,
and
169
Figure 5.14 Decay scheme associated with
169
Tm Mössbauer spectroscopy.
5.2.6 Cryostats
Helium-flow cryostats have largely replaced older cold-finger and exchange-
transfer line to a large transport dewar, or have an integrated liquid helium
reservoir. The latter designs will generally also have a liquid nitrogen-cooled
radiation shield and can exhibit consumption rates as low as 100 cm
3
/hour for
operation from 5–300 K. Liquid helium is drawn through a capillary from the
storage vessel and vaporized as it passes through a small sintered copper plug
fitted with a resistive heater. Flow rates are metered using a needle valve and
temperature control is achieved by balancing cooling derived from the flow of
helium vapor with resistive heating applied to the copper plug. Silicon diodes
are popular as thermometers in this temperature range; however, for work
below 50 K, departures from standard curves can become significant and they
should either be individually calibrated, or replaced with a calibrated
ruthenium oxide “cernox” thermometer. Temperatures below 5 K can be
achieved by evacuating the sample space with a reasonably large roughing
pump and using the needle valve as a throttle valve. Work down to 1.3 K is
possible with some care. Much lower temperatures demand a dedicated
3
He
system or a
3
He/
4
He dilution refrigerator.
5.2.6.1 Closed-Cycle Refrigerators
Substantial improvements in closed-cycle refrigerator technology have led to
the widespread availability of simple two-stage units that can cool below
4 K without demanding liquid cryogens. While they represent a larger capital
investment than a simple helium-flow cryostat, they are extremely reliable
5.2 Methodology
225
magnetic fields. For many of the more popular resonances (
gas systems, as the former are far more efficient. Current designs use either a
the composition or pretreatment of the material under study; however, the
Tm) it is also possible to work at elevated temperatures (metallic iron
majority of Mössbauer studies involve reduced temperatures or applied
A significant amount of work is carried out under ambient conditions, varying
has been studied well above its Curie temperature).
9.4 d
5. Mössbauer Spectroscopy
and can quickly save on liquid helium costs. Unfortunately, the reciprocating
action of the expander head and the action of the large compressor combine to
make the cold stage a mechanically noisy environment. Making a Mössbauer
measurement while the sample is mounted on a vibrating stage is impossible.
Isolating the sample stage from the mechanical noise of the cold head, while
still coupling it thermally, adds some complexity to the system and usually
raises the base temperature of the sample. However, with proper designs, it is
possible to reduce the vibration levels to the point where they do not lead to a
measurable broadening of the Mössbauer lines of an
57
Fe spectrum. Current
best designs place the cold head under the sample where it is used to cool
helium gas at atmospheric pressure, which in turn cools the sample. The
sample mounting stage is mechanically isolated from the cold head, and only
coupled through soft (often rubber) bellows. The top-loading nature of this
design is a major advantage as samples are surrounded by cold helium gas and
so are uniformly cooled. They can be removed and remounted without
shutting down the system, Turn-around times of about an hour are normal.
Older, bottom-loading designs place the sample in vacuum, greatly increasing
the equilibration times and opening up the possibility of temperature gradients
between the sample and the thermometers. The refrigerator must be shut
down and warmed to ambient temperature before the sample can be changed.
Turn-around times for these systems can be as long as a day. With samples
being studied at many temperatures over several days, the sample change
delay is a nuisance but not a major problem.
5.2.6.2 Magnetic Fields
The magnetic ordering of materials can be strongly affected by an applied
magnetic field, and Mössbauer spectroscopy is widely used to study spin-flop
transitions, field-induced reorientations, and magnetostructural transitions.
Such work brings its own set of restrictions and problems. The large fields
inevitably demand a superconducting solenoid and so a liquid helium cryostat
is needed. High-field magnets are physically large so a large source-sample-
detector path is unavoidable. High-activity sources and efficient detection
become important. Detector choice becomes more limited as the stray fields
from a large solenoid are significant and these can affect the photomultiplier
used with NaI(Tl) scintillation detectors and also damage HPGe detectors
through penning discharges in the vacuum space around the biased detector.
Gas-filled proportional counters are popular choices, however it is possible to
use scintillation detectors if a long light pipe is placed behind the NaI(Tl)
crystal so that the photomultiplier can be located well away from the magnet.
The simplest cryostat geometry has a vertical field with the sample placed
in the center of a superconducting solenoid. This arrangement has the field
and J directions parallel to each other (axial geometry). The detector is placed
below the cryostat and the source is above the sample, located at a field-null
226