Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 1. Введение в технику регулирования линейных систем Часть 2. Оптимизация контура регулирования
Подождите немного. Документ загружается.


ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Л.С. Удут, О.П. Мальцева, Н.В. Кояин
ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ
АВТОМАТИЗИРОВАННЫХ
ЭЛЕКТРОПРИВОДОВ
Часть 1. Введение в технику регулирования линейных систем
Часть 2. Оптимизация контура регулирования
Издание второе,
переработанное и дополненное
Допущено УМО по образованию в области энергетики и электротехники
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по специальности 140604 – «Электропривод и автоматика
промышленных установок и технологических комплексов» направления
подготовки 140600 – «Электротехника, электромеханика
и электротехнологии»
Издательство
Томского политехнического университета

Томск 2007
УДК 62-83-52
У31
Удут Л.С.
У31 Проектирование и исследование автоматизированных
электроприводов. Часть 1. Введение в технику регулирования
линейных систем. Часть 2. Оптимизация контура регулирования:
учебное пособие / Л.С. Удут, О.П. Мальцева, Н.В. Кояин. – 2-е
изд., перераб. и доп. – Томск: Издательство Томского
политехнического университета, 2007. – 156 с.
В учебном пособии изложены необходимые сведения из основ теории
и техники регулирования линейных систем. Рассмотрены типы звеньев и их
комбинации в контуре регулирования, принципы построения регуляторов на
операционных усилителях, вопросы компенсации инерционностей в контуре
и оптимизации контуров систем подчиненного регулирования. Пособие
дополняется комплектом из трех методических указаний для проведения
лабораторных и практических занятий с целью более глубокого изучения
динамических характеристик звеньев и регуляторов и методов оптимизации
контуров регулирования.
Предназначено для студентов направления 140600 «Электротехника,
электромеханика и электротехнологии» и специальности 140604 «Электропривод
и автоматика промышленных установок и технологических комплексов».
УДК 62-83-52
Рекомендовано к печати Редакционно-издательским советом
Томского политехнического университета
Рецензенты
Доктор технических наук, профессор
Томского университета систем управления и радиоэлектроники
В.А. Бейнарович
Кандидат технических наук, доцент
Северской государственной технологической академии
С.Н. Кладиев
Томский политехнический университет, 2007
2

Оформление. Издательство Томского политехничекого университета, 2007
ВВЕДЕНИЕ
Появившиеся в 60-е годы системы автоматического
регулирования последовательного действия очень быстро получили
широкое практическое применение в системах автоматизированного
электропривода. Отличительной особенностью систем
последовательного действия является подчиненное регулирование
координат электропривода. Структурно такие системы состоят из
последовательно включенных контуров регулирования, число которых
равно числу регулируемых координат, таких, например, как ток и
напряжение якоря, скорость вращения двигателя, угол поворота вала
механизма и др. Каждый контур имеет отдельный регулятор,
настраиваемый в соответствии с передаточной функцией объекта
регулирования этого контура. Регуляторы оказываются включенными
последовательно, так что выходной сигнал предыдущего регулятора
является сигналом задания для последующего регулятора.
Таким образом, отдельный контур регулирования является
базовым элементом системы регулирования последовательного
действия. Способ же подчиненного регулирования позволяет свести
задачу проектирования многоконтурных систем к последовательной
оптимизации отдельных контуров регулирования, начиная с
внутреннего. Решение такой задачи характеризуется высокой степенью
унификации приемов расчета, настроек регуляторов, структур контуров
и систем регулирования в целом, а также средств их практической
реализации.
1. ВВЕДЕНИЕ В ТЕХНИКУ РЕГУЛИРОВАНИЯ
ЛИНЕЙНЫХ СИСТЕМ
1.1. Передаточные функции, временные
и частотные характеристики
При математическом описании динамики система
автоматического управления электропривода разбивается на отдельные
элементы и контуры регулирования. Уравнения отдельных элементов
составляются по правилам соответствующей технической науки (звено
может представлять собой электрическую машину, механическую
передачу, электрическую цепь и т. п.). Уравнение элемента должно
представлять собой зависимость между теми величинами, которые в
3
схеме исследуемой системы указаны на его выходе и входе. Уравнения
могут быть алгебраическими, интегральными, но чаще всего эти
уравнения являются дифференциальными уравнениями. Они могут
быть линейные и нелинейные, последние должны быть линеаризованы.
Совокупность дифференциальных уравнений элементов и уравнений
связей между ними описывает поведение контура или всей системы
регулирования в целом.
От системы уравнений путем исключения промежуточных
переменных можно перейти к одному дифференциальному уравнению,
которое связывает входные и выходные координаты системы (рис. 1.1).
Линейные системы с постоянными параметрами описываются
неоднородными линейными дифференциальными уравнениями с
постоянными коэффициентами вида
,
d
d
d
d
d
d
d
d
d
d
d
d
0101
01
d
t
z
d
t
z
db
t
x
b
t
x
b
a
t
y
a
t
y
a
k
k
k
m
m
m
n
n
n
(1.1)
где a, b, c – постоянные коэффициенты;
n – порядок уравнения, причем n > m и n > k.
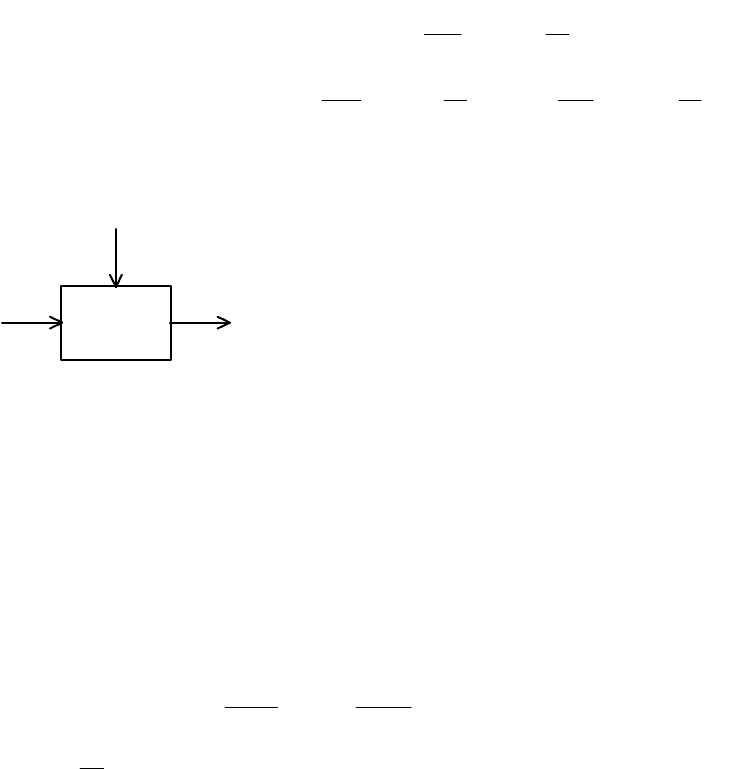
Рис. 1.1. Система автоматического регулирования в общем виде: y(t) –
регулируемая координата; x(t) – управление; z(t) – возмущение
В упрощенной символической операторной форме записи
дифференциальное уравнение (1.1) может быть записано в виде:
)t(x)bpbpb()t(y)apapa(
m
m
n
n 0101
),t(z)dpdpd(
k
k
01
(1.2)
),()()()()()( tzpDtxpBtypA
(1.3)
),()()()()(
)(
)(
)(
)(
)(
)( tzpWtxpWtz
pA
pD
tx
pA
pB
ty
zx
(1.4)
где
dt
d
p
– алгебраизированный оператор (обозначение операции)
дифференцирования. Знак
( )
означает, что это не равенство, а
символическое обозначение. При записи и преобразовании
дифференциальных уравнений оператор p можно рассматривать как
алгебраический сомножитель, а выражение py, px или pz – как
САР
z(t)
y(t)x(t)
4
произведение, не обладающее свойством коммутативности: нельзя
вместо py писать yp;
A(p), B(p) и D(p) – операторы, представляющие собой полиномы с
постоянными коэффициентами;
A(p) – собственный оператор;
B(p) и D(p) – входные операторы по управлению и возмущению
(операторы воздействия);
)(
)(
)(
)(
)( и
)(
)(
)(
)(
)(
pA
pD
tz
ty
pW
pA
pB
tx
ty
pW
zx
(1.5)
– операторы [1; гл. 2, раздел 2.3] или передаточные функции [2; гл. 5,
§3 и §15], или передаточные функции в операторной форме [3; §2.3]
системы по управлению и возмущению – отношение входного
оператора (оператора воздействия) к собственному оператору.
Используя понятие передаточной функции (1.5), систему,
описываемую дифференциальным уравнением (1.3), можно представить
(при
0z
) в виде структурной схемы (рис. 1.2). Передаточная функция
(оператор)
)( pW
x
означает те же действия, что и предусмотренные
дифференциальным уравнением (1.3), т. е. она (он) характеризует
поведение системы во временной области.
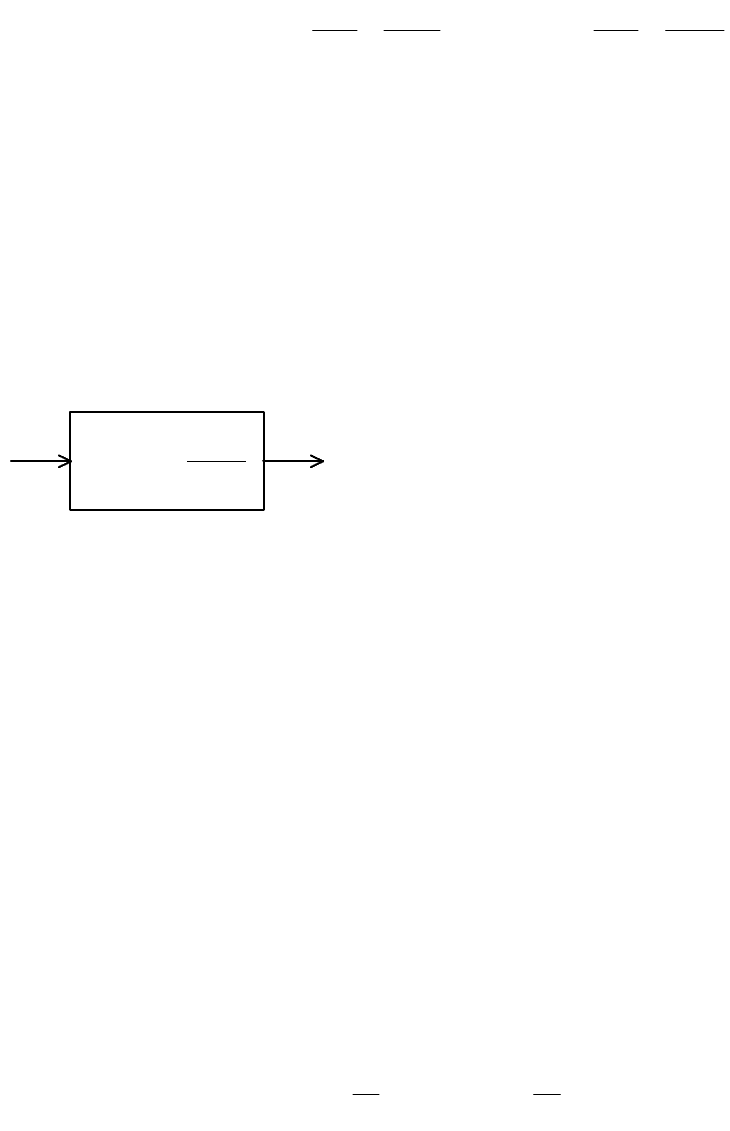
Рис. 1.2. Структурная схема,
составленная относительно
оригиналов переменных (как функций
времени)
Понятие передаточной функции весьма удобно при анализе
структурных схем. Правила преобразования структурных схем
позволяют получать результирующие (эквивалентные) передаточные
функции отдельных участков или всей системы, а в дальнейшем, в
случае необходимости, перейти к дифференциальным уравнениям.
Если в дифференциальном уравнении (1.1), описывающем
динамику системы, все производные
),,( pp
n
положить равными
нулю, то получится уравнение, соответствующее установившемуся
состоянию системы:
zdxbya
000
, (1.6)
где следует принимать y = const, x = const, z = const.
Уравнение (1.6) представляет собой статическую характеристику
системы. Если принять z = 0 или x = 0, то получим статические
характеристики системы, соответственно, по управлению
(регулировочная) и по возмущению
x
a
b
y
0
0
и
z
a
d
y
0
0
, (1.7)
5
y(t)x(t)
W p
B p
A p
x
( )
( )
( )

которые характеризуются коэффициентами передачи по управлению и
возмущению:
0
0
a
b
k
x
и
0
0
a
d
k
z
. (1.8)
Если динамика системы регулирования описывается линейным
дифференциальным уравнением, то и статические характеристики
системы линейны.
Для определения реакции системы на управляющее или
возмущающее внешнее воздействие и последующего построения
кривой реакции выходной координаты (переходного процесса) y(t)
необходимо решить дифференциальное уравнение (1.1). Полное
решение дифференциального уравнения (1.1) имеет вид
)()()(
всв
tytyty
, (1.9)
где
)(
св
ty
– общее решение однородного уравнения
0)()( typA
, имеет
вид
t
n
tt
n
eCeCeCty
21
21св
)(
, (1.10)
определяется только оператором A(p) и представляет собой свободную
составляющую переходного процесса;
n
ССС ,,,
21
– произвольные постоянные интегрирования,
определяемые из начальных условий процесса;
n
,,,
21
– корни характеристического уравнения
0
01
1
1
aaaa
n
n
n
n
, (1.11)
которое получается приравниванием к нулю собственного оператора
A(p) и заменой
p
, где
есть некоторое комплексное число;
)(
в
tx
– частное решение, представляет собой вынужденную
составляющую переходного процесса, определяется правой частью
уравнения (1.1) и соответствует некоторому установившемуся режиму в
системе, который наступает после затухания
)(
св
ty
.
Операторы B(p) и D(p) определяют, соответственно, влияние
управляющего и возмущающего воздействия, т. е. соответствующее
вынужденное движение системы. Поскольку в линейных системах
справедлив принцип суперпозиции, то частное решение
)(
в
ty
складывается из отдельных слагаемых, соответствующих отдельным
членам правой части уравнения. При этом каждое слагаемое частного
решения
)(
в
ty
может определяться по отдельности для каждого
управляющего или возмущающего воздействия независимо от других, а
затем они суммируются, и получается результирующий переходный
процесс.
Определение произвольных постоянных
n
СС
1
осуществляется
по начальным условиям при t = 0 обязательно с использованием
6
полного выражения решения (1.9) и является самой трудоемкой
операцией при расчете переходного процесса.
Таким образом, корни уравнения (1.1) определяются только видом
его левой части, а постоянные интегрирования определяются также и
видом правой части. Поэтому быстрота затухания и форма переходного
процесса определяются как левой, так и правой частями исходного
дифференциального уравнения.
Свободная составляющая
)(
св
ty
является реакцией системы на
мгновенное (скачкообразное) изменение сигнала на входе. Отсюда
следует, что о характере переходного процесса можно судить, подав на
вход звена воздействие в виде так называемой единичной ступенчатой
функции
)(1)( ttg
, что означает: g = 0 при
0t
и g = 1 при t > 0.
Размерность единицы соответствует размерности физической величины
на входе звена. Характеристику звена при подаче на его вход единичной
ступенчатой функции 1(t) называют переходной характеристикой и
обозначают h(t).
Вынужденная составляющая реакции системы
)(
в
ty
зависит от
вида входного воздействия. Входные сигналы чаще всего описываются
в общем виде степенным рядом
2
210
)( tgtggtg
, (1.12)
где
210
g,g,g
– постоянные числа,
или синусоидальной (косинусоидальной) функцией
tgtg
m
sin)(
,
где
m
g
– амплитуда;
– угловая частота входного воздействия.
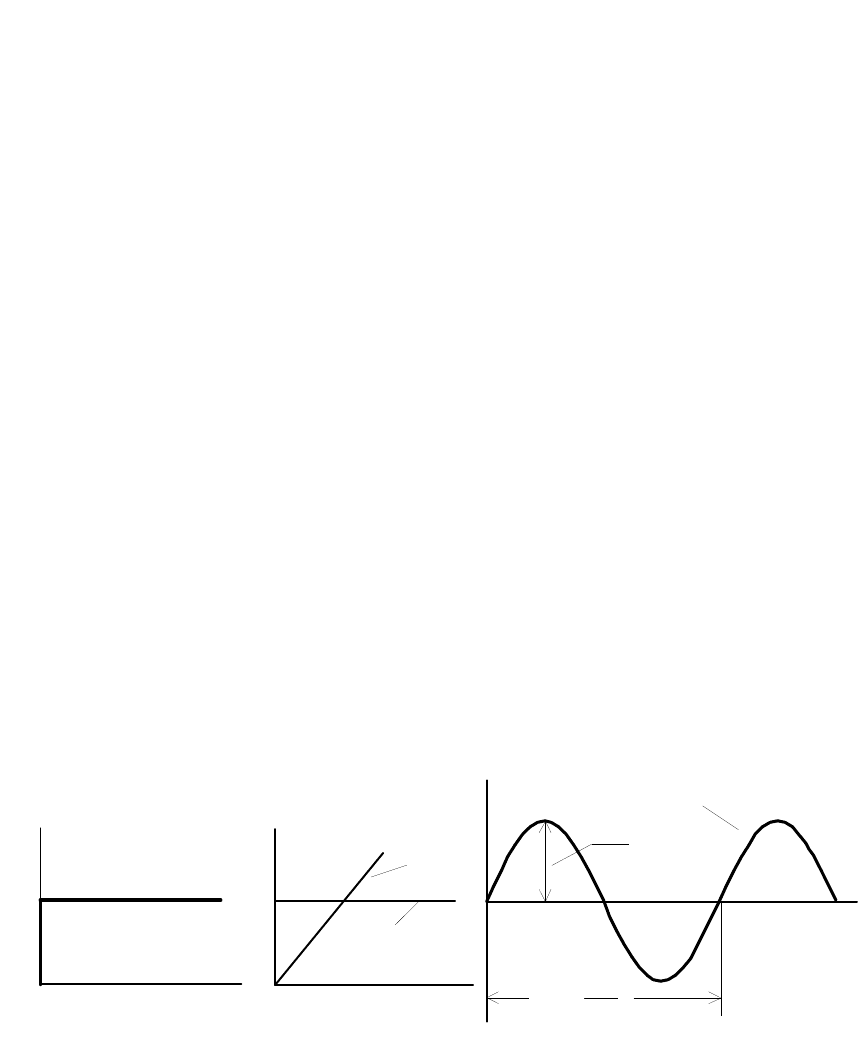
На практике обычно ограничиваются следующими типовыми
входными сигналами (рис. 1.3):
0
)( gtg
– ступенчатый (при
1
0
g
– единичный);
tgtg
1
)(
– линейный;
)sin()( tgtg
m
– гармонический.
t
t
t
T
2
а б
в
g
g(t)
g(t)
g g(t)
g
m
g
0
g g,
( )g t
g
1
Рис. 1.3. Типовые воздействия: а – ступенчатое; б – линейное; в – гармоническое
(синусоидальное)
7
Приступать к расчету переходного процесса и оценке его
качественных показателей имеет смысл только в случае, если система
регулирования устойчивая. Поскольку в понятие устойчивости системы
входит только факт наличия или отсутствия затухания переходного
процесса после прекращения внешнего воздействия, то устойчивость
линейной системы определяется только характеристическим
уравнением
0)( A
и не зависит от вида правой части
дифференциального уравнения (1.1).
Для того чтобы переходный процесс в системе регулирования
был затухающим, а сама система устойчивой, необходимо, чтобы
вещественные корни и вещественные части комплексных корней были
бы отрицательные.
Если корень
1
вещественный и отрицательный
1
)0где(
, то слагаемое, определяемое этим корнем в уравнении (1.9),
будет представлять собой экспоненту
t
C
е
1
и при
t
будет затухать
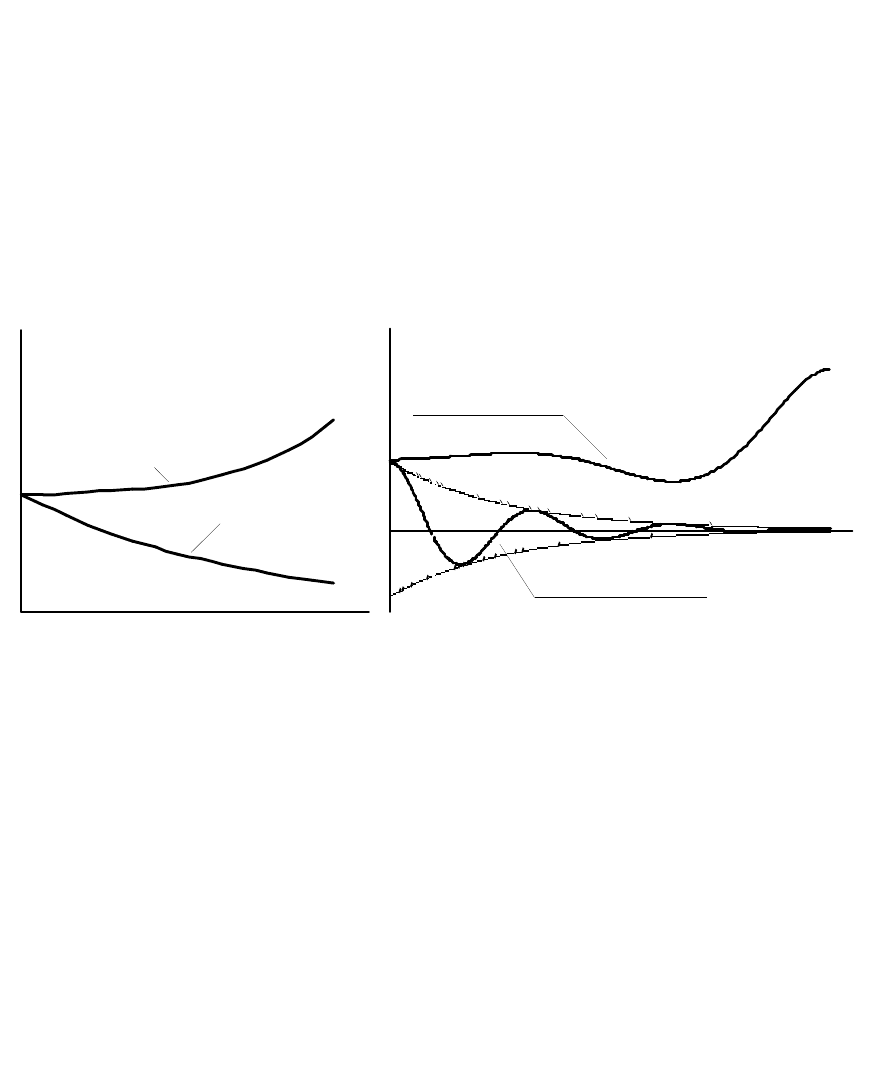
(рис. 1.4, а).
t
t
расходящийся
процесс
затухающий
процесс
а б
1
1
j
2,1
j
2,1
t
С
1
е
1
tt
СС
21
ее
21
Рис. 1.4
Комплексные корни попарно сопряженные. При отрицательной
вещественной части два корня имеют вид
j
2,1
. Слагаемые,
определяемые этими корнями в уравнении (9), могут быть представлены
в виде
)sin(eee
)(
2
)(
1
tACC
ttjtj
, (1.13)
где А и
– новые постоянные интегрирования. В этом случае
получаются затухающие колебания (рис. 1.4, б), причем
представляет
собой круговую частоту затухающих колебаний, а
– показатель
затухания, определяющий затухание огибающей к кривой переходного
процесса. При положительной вещественной части комплексных корней
j
2,1
колебания будут расходящимися. В случае чисто мнимых
8
корней
j
2,1
слагаемое, определяемое этими корнями в (1.9), будет
представлять собой незатухающие колебания с постоянной амплитудой
)sin(ee
21
tACC
tjtj
.
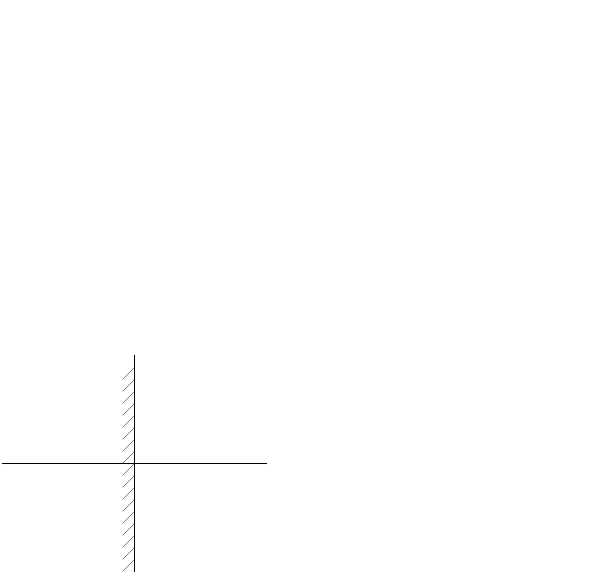
Корни характеристического уравнения можно представить в
виде точек на комплексной плоскости корней (рис. 1.5). Для
устойчивости линейной системы необходимо и достаточно, чтобы все
корни лежали слева от мнимой оси плоскости корней. Если хотя бы
один корень окажется справа от мнимой оси, то система будет
неустойчивой. Таким образом, левая полуплоскость представляет собой
область устойчивости, а мнимая ось является границей устойчивости
системы.
Рис. 1.5. Расположение корней
характеристического уравнения устойчивой
системы третьего порядка на комплексной
плоскости
Вообще говоря, если найдены корни характеристического
уравнения и они левые и построена кривая переходного процесса, то
этого достаточно для того, чтобы судить об устойчивости исследуемой
системы регулирования и качестве ее работы во временной области.
Однако непосредственное вычисление корней
характеристического уравнения выше четвертого порядка представляет
собой весьма трудоемкую задачу, хотя и решаемую с применением
приближенных методов вычислений. Поэтому в практике
автоматических систем широкое применение получили способы, не
требующие непосредственного вычисления корней и позволяющие
судить о характере корней характеристического уравнения по
некоторым косвенным признакам. Были разработаны так называемые
критерии устойчивости, устанавливающие необходимые и
достаточные условия, которые следует наложить на систему, чтобы
корни ее характеристического уравнения были бы отрицательными или
имели бы отрицательные вещественные части. Прежде всего, это
алгебраический критерий Гурвица, который определяет необходимые и
достаточные условия отрицательности вещественных частей корней
алгебраического уравнения A(p) = 0.
Критерий Гурвица хотя и помогает ускорить решение задачи
оценки устойчивости системы регулирования, но практически не дает
9
*
*
*
p
1
p
2
p
3
j
j
информации о качестве ее работы и малопригоден для решения задач
синтеза и анализа.
Существенные трудности исследования во временной области
систем регулирования, описываемых дифференциальными уравнениями
высокого порядка, привели к разработке методов их исследования в
частотной области. Правомерность такой замены вытекает из
следующих рассуждений. Как известно, любая временная функция
может быть разложена в частотный ряд (ряд Фурье): периодическая – в
совокупность дискретных гармоник, непериодическая – в непрерывный
спектр частот с бесконечно малым интервалом между соседними
гармониками. Другими словами, всякая временная функция x(t) имеет
ей соответствующую спектральную характеристику
)( jF
:
ttxjF
tj
de)()(
(1.14)
– прямое преобразование Фурье;
de)(
2
1
)(
tj
jFtx
(1.15)
– обратное преобразование Фурье.
Если преобразовать обе части уравнения (1.1) по Фурье, то
получим (для упрощения принято z = 0)
,)()(
)()(
01
01
txFbjbjb
tyFajaja
m
m
n
n
(1.16)
где F[y(t)] и F[x(t)] – символическая запись выражения (1.14) для x(t) и
y(t).
Тогда, по аналогии с (1.4),
)(
)(
)(
)(
)(
jA
jB
txF
tyF
jW
(1.17)
– частотная передаточная функция или амплитудно-фазовая
частотная функция [3; §2.4] системы по управлению, представляющая
собой отношение спектральной характеристики сигнала на выходе
системы к спектральной характеристике сигнала на ее входе.
Амплитудно-фазовая частотная функция
)( jW
представляет
собой комплексное число и может быть записана в показательной или
алгебраической форме
)()()()(
)(
jQPAjW
j
e
, (1.18)
где
)()()()(mod)(
22
QPjWjWA
– модуль;
)(
)(
arctg)(arg)(
P
Q
jW
– аргумент или фаза;
)(Re)( jWP
– вещественная часть;
)(Im)( jWQ
– мнимая часть.
На комплексной плоскости частотная передаточная функция
)( jW
представляет собой вектор, длина которого равна
)(A
, а угол с
10