Troyan V., Kiselev Y. Statistical Methods of Geophysical Data Processing
Подождите немного. Документ загружается.

Chapter 2
Elements of mathematical statistics
The mathematical statistics studies both statistical description of experimental
observations, and checkout of competing mathematical models describing natural
physical process. The mathematical statistics is the basic tool of processing of re-
sults of physical, including geophysical, experiments with the minimum losses of the
information about investigated object.
The basic notion of the mathematical statistics is the sample or block of ob-
servations ξ = (x
1
, x
2
, . . . , x
n
) of any quantitative variable. If this variable is a
random one, the sample
ξ
ξ = (x
1
, x
2
, . . . , x
n
) is a random vector. The number n is
called as the sample size. The sample is called repeated, if the components of the
vector ξ are independent and identically distributed. Any function g(x
1
, x
2
, . . . , x
n
)
of observations (x
1
, x
2
, . . . , x
n
) is called the statistics.
The examples of the statistics:
• sample mean ¯x = (1/n)
n
P
i=1
x
i
;
• sample variance s
2
= (1/n)
n
P
i=1
(x
i
− ¯x)
2
;
• sample variance coefficient v = s/¯x;
• greatest sample element x
max
;
• least sample element x
min
.
The modern level of a geophysical experiment is characterized by the great data
flow. So, at realization of seismic operations by the sea for one day 10
10
bit of the
information is filed. Thus the visualization of the data, even without interpretation,
is impossible without application of statistical methods of processing of the seismic
data.
2.1 The Basic Concepts of the Decision Theory
The results (measurement data) of a real geophysical experiment are always random
because of an inevitable presence of errors of measuring. These data represent val-
ues of a random vector ξ with the distribution f(xx, θ) which is considered partially
83
84 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
known. It is supposed, that parameter θ is an element of a set Ω (space of param-
eters). The observations ξ
ξ
ξ usually are used for deriving the information about the
distribution of
ξ
ξ or about a value of the parameter θ (vector of parameters θ
θ
θ), on
which it depends. The implementation of the statistical analysis is necessary in con-
nection with the indeterminacy of an interpretation of results of observations, arising
because of the ignorance of the distribution of
ξ
ξ and consequently the ignorance of
basic elements of the mathematical model of a phenomenon. Therefore there is an
indeterminacy in a choice of best “activities” according to results of observations.
The problem is to find a rule erecting correspondence between results of observa-
tions and reached decision. This correspondence is given by the decision function
δ(x
1
, . . . , x
n
) (decision rule), which to each sample of experimental data x
1
, . . . , x
n
assigns a particular expedient of an activity or a decision d = δ(x
1
, . . . , x
n
), and
the domain of the definition of this function is the set X, and a range of values
is the set of the possible decisions D. In the decision theory for a choice of the
function δ the loss function ϕ(θ, d) is introduced, which describes the losses, bound
with a decision making d provided that the distribution of ξ is equal f(xx, θ) and θ
is considered as a true parameter.
It is possible to emphasize the following basic elements, which define a solution
of problems of the mathematical statistician.
(1) Distribution class F = {f (
x
x,
θ
θ), θθ ∈ Ω}, in which distribution of ξ is included.
(2) Structure of the space D of possible decisions d, d ∈ D.
(3) The shapes of a loss function ϕ(θ, d).
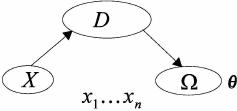
In this connection three various spaces are used. The observation space X con-
tains all possible results of observations. The parameter space Ω contains all possible
values of the parameter θ or vector of parameters θ = (θ
1
, . . . , θ
n
). The decision
space D contains all possible decisions. The connections between spaces X, D and
Ω are shown at Fig. 2.1.
Fig. 2.1 The connection between spaces X, D and Ω.
The loss function ϕ(θ, d) is a random value, because d = δ(ξξ) depends on a
random vector ξ. It is possible to define an average loss, which arises from the
application of the decision rule d = δ(ξξ) at major number of repeated observations in
an experiment, approximately as the mathematical expectation of the loss function:
R
δ
(θ) = M [ϕ(θ, δ(
ξ
ξ))] =
Z
. . .
Z
ϕ(θ, δ(ξ))f
ξ
(x, θ)dx
1
. . . dx
n
.

Elements of mathematical statistics 85
The function R
δ
(θ) is called the risk function for the decision rule δ.
If we consider θ as a random variable and there is a priori density function f(θ),
then the notion of Bayes risk is introduced:
r
f(θ)
(δ) =
Z
R
δ
(θ)f (θ)dθ,
or
r
f(θ)
(δ) = M
θ
[M
ξ
[ϕ(θ, δ(
ξ
ξ))]] .
Let us consider the main elements, which define the statistical problem defini-
tion.
2.1.1 Distribution class of the statistical problem
Definition of the distribution class f(x, θ) is based on a priori information about
properties of the random observations and an experiment environment.
Example 2.1. If in a fixed time or spatial interval the probability of an occurrence
more than one event (seismic wave) in a small time interval is quantity of higher
order of smallness, than probability of the occurrence of one event (seismic wave),
and if such events are nonoverlapping intervals statistically independent, at these
guesses the number of occurrence of events (seismic waves) is described by the
Poisson distribution:
P (ξ = m) =
a
m
m!
e
−a
(m = 1, 2 . . . ).
Example 2.2. The study of a microseism shows, that they are a sum of a great
number of the independent factors, and the influence of each of them it is very
small in comparison with all total, hence, at the realization of conditions of the
central limit theorem it is possible to make the guess about a normal distribution
of microseism ξ ∈ N(m
ξ
, D
ξ
).
Usually type of distribution is chosen from the preliminary analysis of the ex-
periment statement and the physical nature of investigated fields and errors of
measurements. The vector of parameters θ is determined during the solution of a
problem.
2.1.2 The structure of the decision space and the loss function
The structure of a decision space substantially determines a type of a current sta-
tistical problem, i.e. it underlies an expedient of the classification of statistical
problems.
Example 2.3. Let us (x
1
, x
2
, . . . , x
n
) is a sample belonging to a sample population
with the distribution f (x, θ), where θ is an unknown parameter of the distribution,
as, for example, in the cases of the considered earlier Poisson distribution (θ = a)
86 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
and the Gaussian distribution
θ
θ = (m
ξ
, D
ξ
), and let us γ = γ(θ) is a real function
of the parameter.
(A) If it is necessary to determine, exceeds γ(θ) some threshold value γ
0
whether
or not, then pick one from the solutions: d
0
: γ > γ
0
or d
1
: γ ≤ γ
0
. The
loss function ϕ(γ, d) is picked usually so that it is equal to zero, if the right
decision is chosen, and it is a steadily increasing function |γ−γ
0
| at the incorrect
decision. Such statement agrees with a task of a single signal extraction (on a
noise background). In this case γ is a relation) signal/noise, γ
0
is the threshold
relation signal/noise, d
0
is a presence of the signal, d
1
is an absence of the
signal.
(B) If it is necessary to find numerical value of γ(θ), then in this case, the decision
d is equal to an estimate of ˆγ(θ). The loss function is usually represented
as ϕ(γ, d) = w(γ)ψ(|d − γ|), where ψ(|d − γ|) is the steadily increasing error
function |ˆγ −γ|, relevant to a deviation of an estimate from a true value. More
often in the estimation theory the square-law loss function is used. So, for
γ(θ) = θ, d =
ˆ
θ we shall obtain
ϕ(θθ −
ˆ
θ) = (θ −
ˆ
θ)
T
W (θθ −
ˆ
θ)
for the vector parameter and
ϕ(θ −
ˆ
θ) = w(θ −
ˆ
θ)
2
for the scalar parameter θ.
(C) The parametrisation of a signal which is received on a noise background can
be considered as an example of the point estimation problem: u
i
= Aϕ(t
i
−τ)
+ ε
i
with the vector parameter θ
θ
θ = (A, τ ).
(D) If at decision-making it is necessary to estimate an interval (α, β), in which
with a given probability the estimate ˆγ(θ) lays, then in this case we come to a
problem of an interval estimation. As a posteriori density f(θ/x
x
x) is the most
complete characteristic of the parameter θ at a given sample of observations
(x
1
, . . . , x
n
), the problem of an interval estimation can be formulated as a
problem of a choice of an interval (α, β) of values θ, which in the best way
describes f(θ/x). In this case the loss function ϕ(θ; α, β) is a function of the
parameter θ and the interval. For example, the loss function can look like
ϕ(θ; α, β) =
w
1
(β − α)
2
, if θ ∈ (α, β),
w
2
(θ − α)
2
, if θ < (α, β),
w
3
(θ − β)
2
, if θ > (α, β),
Elements of mathematical statistics 87
and a posteriori loss is equal
M
θ/ξ
[ϕ(θ; α, β)] = w
1
β
Z
α
(β − α)
2
f(θ/x
1
, . . . , x
n
)dθ
+ w
2
β
Z
α
(θ − α)
2
f(θ/x
1
, . . . , x
n
)dθ
+ w
3
β
Z
α
(θ − β)
2
f(θ/x
1
, . . . , x
n
)dθ.
The decision-making is connected with a value of an interval minimizing a
posteriori loss.
(E) From the practical point of view, the problem is important, in which it is
necessary to implement decision-making about a state of the object and to
yield an estimate of desired parameters, i.e. to combine the problems such as
A and B in one problem. As an example it is possible to give a problem of the
signal extraction with a simultaneous estimate of its parameters (an amplitude
and a time of the arrival).
The statistical classification of foregoing problems consists in the following:
The problems such as A with two decisions are stated usually in the terms of
hypothesis checking, which should be accepted or is rejected. Such problems belong
to a wide class of problems, which is called the test of hypothesis.
The problems such as B, in which it is necessary to find numerical value of
parameter, belongs to a class of problems of the point statistical estimation. Prob-
lems such as C, in which the interval covering an estimate of the parameter with
the given probability is determined, belongs to a class of problems of the interval
statistical estimation.
In the statistical theory of the interpretation of geophysical observations the
following classification of foregoing problems is used.
(1) Problems such as A, in which it is necessary to determine a quantitative state of
geophysical object (there is a seismic signal on a given interval of a seismogram
or there is only seismic noise; whether there is a magnetized object of the
given shape or it is realization of a noise registered, for example, on a vertical
component of a magnetic field etc.), have received a title of problems of the
qualitative interpretation.
(2) Problems such as B, in which the point parameter estimation of geophysical
objects (the determination of an amplitude and a time of the arrival of a seismic
signal; a finding of a magnetization and an occurrence depth of the upper edge
of a magnetic body; the determination of an electron concentration at given
height etc.) is called as problems of the quantitative interpretation or point-
quantitative interpretation.
88 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
(3) Problems such as C, in which the interval parameter estimation of geophysical
objects (the determination of an interval of the occurrence depth of a reflecting
seismic horizon; the finding of an interval of an occurrence depth of the upper
edge of the magnetized body; the determination of an interval for quantity of
an electron concentration at a given height etc.), is called as problems of the
interval-quantitative interpretation.
(4) It is necessary to estimate problems such as D, in which both a qualitative
state of the object, and parameters, describing it (a signal extraction together
with the determination of its parameters – an amplitude and a time of the
arrival; the detection of the magnetized body and the determination of its
parameters – magnetization, the occurrence depth etc.), is called as problems
of the quantitative-qualitative interpretation or by the combined interpretation.
2.1.3 Decision rule
The classical approach to a choice of a decision rule δ(
ξ
ξ) is based on a risk function
R
δ
(θ). The best decision rule minimize the risk. Let δ
1
and δ
2
are two various
decision rules,
R
δ
1
(θ) < R
δ
2
(θ) for all θ,
then δ
1
is the best decision rule in the comparison with δ
2
.
Let’s consider an example of the analysis of three risk functions, which are
connected with three decision rules.
In a given range of values θ the decision rule δ
1
is more preferable than δ
2
. While
the decision rule δ
3
at some values of the parameter has the least value of a risk
function in the comparison with δ
1
and δ
2
, and at other values of the parameter it
is greater, it is impossible to find a rule, which is the best at all θ, however at fixed
θ it is possible to find a sole best rule. The basic indeterminacy in a such choice is
arises from an unknown value of θ.
The decision rule δ (δ ∈ D) is called admissible, if the decision rule δ
1
(δ
1
∈ D)
with the inequality
R
δ
(θ) ≥ R
δ
1
(θ),
which is valid for all θ, does not exist. Thus, if the solving rule is admissible, then in
a class of the decision rules D the decision rule δ
1
does not exist, which is not worse
than δ for all θ. Usually admissible estimates meet much, therefore it is necessary
to offer a criterion of a choice of the best rule among admissible rules.
Bayes strategy for a choice of a decision rule δ for a priori density f(θ) is based
on a function of a posteriori risk r
f(θ)
(δ). The best, from the point of view of the
Bayes strategy, is a decision rule relevant to the minimum of a posteriori loss
r
(B)
f(θ)
(
ˆ
δ) ≤ r
f(θ)
(δ)
Elements of mathematical statistics 89
for arbitrary δ, or
ˆ
δ = arg min
δ∈D
Z
θ
R
δ
(θ)f (θ)dθ.
The minimum risk r
(B)
f(θ)
(
ˆ
δ) is called the Bayes risk for a priori density f (θ). To
use this criterion, it is necessary to assume, that the parameter θ is a random one
and its a priori distribution is known. The knowledge of a such distribution is not
always possible in practice. Frequently f(θ) is interpreted as a weight function,
which is determined a degree of a significance of various values of the parameter.
If a priori information about the parameter θ misses, it is expedient to view
a maximum of a risk function as its most important characteristic. Among two
functions is more preferable one which has the minimum value of a maximum of
risk. The decision strategy ensuring a minimum of the maximum risk are termed
the minimax procedure:
ˆ
δ
minmax
= arg
δ∈D
min max
θ∈Ω
R
δ
(θ).
As the maximum designates most major (on the average) losses, which can arise at
the use of the given procedure, the minimax decision in the comparison with other
decisions gives the greatest protection against great losses.
Other criterion of a choice of the decision rule is based on the likelihood func-
tion. Let us consider a sample of n independent observations x
1
, x
2
, . . . , x
n
of the
components of a random vector ξ. As x
1
, x
2
, . . . , x
n
are independent, then a joint
density function is equal
L(x, θ) =
n
Y
i=1
f(x
i
, θ).
The function L(
x
x, θ) is called the likelihood function for θ, if we consider it as a
function of the parameter θ or the vector parameter
θ
θ at stipulated x
1
, x
2
, . . . , x
n
,
which are registered at an experiment.
If the decision is reduced to a problem of the determination of a value of the
parameter θ, then the natural estimate of θ can be picked on the basis of the con-
dition of the greatest probability at the given sample of experimental observations
x
1
, x
2
, . . . , x
n
, i.e. the estimate maximizes the likelihood function
ˆ
Θ
MLM
= arg max
θ∈Ω
L(
x
x, θ).
The method of an estimation, when an estimate of the parameter brings the
greatest value of the likelihood function is called as the maximum likelihood method.
Using the likelihood function, it is possible to formulate the procedure of a decision
not in the terms of a loss strategy, and in the terms of a winning strategy. The
winning is equal to zero (α(θ) = 0), in a case of the improper decision, and it
is positive α(θ) > 0, for the proper decision, where θ is a true quantity of the
parameter. Then it is advisable to supply the likelihood function with a weight

90 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
function connected with winnings, and to determine the value of θ, maximizing a
product α(θ)L(xx, θ).
If we consider θ as random variable and designate as α(θ) a priori distribution
of the parameter, then a posteriori distribution of parameter the θ is written
p(θ/x
x
x) =
1
p(
x
x)
α(θ)L(x
x
x, θ).
The maximization of a posteriori probability can be considered as a strategy of the
estimation
ˆ
Θ
MAP
= arg max
θ∈Ω
p(θ/
x
x) = arg max
θ∈Ω
α(θ)L(x
x
x, θ)
(the multiplier p(xx) does not influence a value of the argument at the maximum
point of the likelihood function, therefore we have rejected it). The estimate
ˆ
Θ
MAP
is called the maximum a posteriori probability estimate.
Consider a two-alternative problem. Let ω
0
and ω
1
designate a range θ, for
which d
0
and d
1
accordingly are the proper decisions and α(θ) = α
0
at θ ∈ ω
0
and
α(θ) = α
1
at θ ∈ ω
1
are valid. We make a decision d
0
, if
α
1
max
θ∈ω
1
L(xx, θ) < α
0
max
θ∈ω
0
L(x, θ),
max
θ∈ω
1
L(
x
x, θ)
max
θ∈ω
0
L(x
x
x, θ)
<
α
0
α
1
,
and the decision d
1
, if
α
1
max
θ∈ω
1
L(xx, θ) > α
0
max
θ∈ω
0
L(x, θ),
max
θ∈ω
1
L(
x
x, θ)
max
θ∈ω
0
L(
x
x, θ)
>
α
0
α
1
.
A such procedure is called the likelihood ratio method. If θ it is possible to con-
sider as a random parameter, then α
0
and α
1
it is possible to interpret as a priori
probabilities of belonging of the parameter to the field of ω
0
and ω
1
accordingly.
2.1.4 Sufficient statistic
A high profile in the practical sense has such a transformation of observations
x
1
, . . . , x
n
, which gives in cutting number of experimental data, but thus the infor-
mation about parameter θ (with distribution f(xx, θ) )or vector of the parameters
θθ (with the distribution f(xx, θ)) is completely maintained. Such type of a trans-
formation is connected with the concept of the notion of the sufficient statistic
T (x
1
, . . . , x
n
), which contains the complete information on the parameter θ. The
statistics T (x) is called sufficient for θ, if the conditional density function xx at given
T is independent from θ, and T and θ can be multivariate and have various di-
mensionalities. The necessary and sufficient condition, that T (x) is the sufficient
statistic for θ, leads to the next writing down of the likelihood function
L(
x
x, θ) = g(T, θ)h(x),

Elements of mathematical statistics 91
where h(x
x
x) does not depend from θ and g(T, θ) and it is proportional to f (T/θ),
which is the conditional density of T at the given parameter θ.
Example 2.4. Let ξ is in the accord with to the Gaussian distribution N(m
ξ
, σ
2
ξ
),
then the likelihood function
L(
x
x, m
ξ
, σ
2
ξ
) = (2πσ
2
ξ
)
−n/2
exp
"
−
1
2σ
2
ξ
n
X
i=1
(x
i
− m
ξ
)
2
#
= (2πσ
2
ξ
)
−n/2
exp
"
−
n
2σ
2
ξ
(¯x − m
ξ
)
2
#
exp
"
−
1
2σ
2
ξ
n
X
i=1
(x
i
− ¯x)
2
#
,
where ¯x = (1/n)
n
P
i=1
x
i
. If σ
2
ξ
is known, then ¯x is in the accord with the Gaussian
distribution N(m
ξ
, σ
2
ξ
/n) and the likelihood function can be represented as
L(xx, m
ξ
) = g(¯x, m
ξ
)h(xx),
where
g(¯x, m
ξ
) = f(¯x, m
ξ
) =
n
2σ
2
ξ
!
1/2
exp
"
−
n
2σ
2
ξ
(¯x − m
ξ
)
2
#
,
h(x) = n
−1/2
(2πσ
2
ξ
)
−(n−1)/2
exp
"
−
1
2σ
2
ξ
n
X
i=1
(x
i
− ¯x)
2
#
.
Consequently, ¯x is a sufficient statistic for m
ξ
. Using the sufficient statistics, we
reduce a volume of data, which is necessary for the parameter estimation. It is
especially essential in a case of a great information flow.
Example 2.5. Let x
1
, . . . , x
n
are an independent components of vector ξξ with
Gaussian distribution. The likelihood function in this case reads as
L(xx, m
ξ
, σ
2
ξ
) = (2πσ
2
ξ
)
−n/2
exp
−
1
2σ
2
ξ
n
X
i=1
x
2
i
+
m
ξ
σ
2
ξ
n
X
i=1
x
i
−
n
2σ
2
ξ
m
2
ξ
!
.
The factorization criterion shows that the statistics T(x) = (
P
i
x
i
,
P
i
x
2
i
) is sufficient
for σ
2
ξ
, m
ξ
, i.e. for the estimation of the parameters of the Gaussian distribution is
sufficient to have a sum of observations and a sum of squared observations. Thus,
it is necessary to store in a computer memory only two numbers —
P
i
x
i
and
P
i
x
2
i
,
that can appear essential at a great sample size n.
2.2 Estimate Properties
The wide class properties of important problems of processing of the geophysical
information brings to finding of estimates of desired parameters (an amplitude and
an arrival time of a seismic signal, a magnetization and an occurrence depth of
92 STATISTICAL METHODS OF GEOPHYSICAL DATA PROCESSING
the magnetized body, an electron concentration at the given height etc.). Because
the estimate is a statistics, then to it the concept of the sufficiency surveyed in
the Sec. 2.1.4 is applicable. The finding of the estimate is reduced to a choice of a
function according to the accepted criterion. The quality of a criterion is determined
by the following basic properties: a consistency, an unbiasedness, an efficiency and
a robustness.
2.2.1 Consistency
The estimate
ˆ
θ
n
for the parameter θ is termed a consistent, if
ˆ
θ
n
converges to a true
value of the parameter θ
0
with increasing of number of observations. It is possible to
define different types of a competence, using various definition of convergence. In the
mathematical statistics at the definition of a consistency a probability convergence
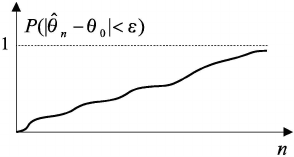
is used more often. The estimate
ˆ
θ
n
is consistent one, if if there is such N for
arbitrary small ε > 0, η > 0 , that
P (|
ˆ
θ
n
− θ
0
| < ε) > 1 − η
for all n > N . In this case it is said, that
ˆ
θ
n
converges on the probability to θ
0
at
the increase n (Fig. 2.2).
Fig. 2.2 The illustration of the convergence in probability.
2.2.2 Bias
A bias b
n
(
ˆ
θ) of the estimate
ˆ
θ, obtained by n observations, means a divergence of
the mathematical expectation of the estimate of a true value of the parameter:
b
n
(
ˆ
θ) = M[
ˆ
θ
n
] − θ
0
.
An estimate
ˆ
θ is called unbiased, if for all n
b
n
(
ˆ
θ) = 0 or M[
ˆ
θ] = θ
0
.
At Fig. 2.3 a changing of the distribution function at the increasing of a number
of observations n (marked by arrow) under conditions of the consistency and the
unbias and without a such condition is demonstrated. Among the estimates of the