Skiadas C.H., Dimotikalis I. (editors) Chaotic Systems: Theory and Applications
Подождите немного. Документ загружается.

348
D.
C.
Theodoridis,
Y.
Boutalis, and M. A. Christodoulou
approximated
with
the
help
of
two
independent
fuzzy subsystems. We also
assume
the
existence
of
disturbance
expressed as modeling
error
terms
de-
pending
on
both
input
and
system
states.
Every
fuzzy
subsystem
is ap-
proximated
from a family
of
HONNF's,
each one being
related
with
a
group
of
fuzzy rules. Weight
updating
laws
are
given
and
we prove
that
when
the
structural
identification is
appropriate
and
the
modeling
error
terms
are
within
a
certain
region
depending
on
the
input
and
state
values,
then
the
er-
ror
reaches zero
very
fast. Also,
an
appropriate
state
feedback is
constructed
to
achieve
asymptotic
regulation
of
the
output,
while keeping
bounded
all
signals
in
the
closed loop.
The
chapter
is organized
as
follows. Section 2
presents
the
Fuzzy
systems
description using
indicator
functions
and
HONNF's.
The
direct
adaptive
Neuro-Fuzzy
regulation
of
systems
being in
Brunovsky
canonical form is given
in
section 3, where
the
problem
formulation
and
the
weight
updating
laws
are
derived. Section 4
presents
simulation
results
and
comparisons while section
5 concludes
the
work.
2 FUzzy
system
description
using
rule
firing
indicator
functions
and
HONNF
Consider a
nonlinear
function
f(x)
E
R,
x E X c R
n
approximately
de-
scribed
by
a
Mamdani-type
Fuzzy
System
(FS).
Let
.fl;"h,
...
,j"
be
defined as
the
subset
of
x E X belonging
to
the
(jl,j2,
...
,jn)th
input
fuzzy
patch
and
pointing
-
through
the
function
fe)
-
to
the
subset
which belong
to
the
[th
output
fuzzy
patch.
In
other
words, .fl;,,12,
...
,j"
contains
input
values x
that
are
associated
through
a fuzzy rule
with
output
values
f(x).
Furthermore,
the
FS
receiving as
input
the
n-tuple
of
x =
(Xl,
X2,
...
,x
n
)
gives
as
output
an
approximate
of
f (x) using fuzzy rules
and
well known fuzzy
inference procedure.
According
to
the
above
notation
the
Rule
Firing
Indicator
Function(RFIF)
or
simply
Indicator
Function
(IF)
connected
to.fl
l
.
. is defined as fol-
Jl
,J2,···
,In
lows:
[..
. x t =
)1,)2,···,)"
I (
())
{ a(x(t)) if (x(t))
E.fl
l
.
.
)1,)2,.·.,)n
0 otherwise
(1)
where a(x(t))
denotes
the
firing
strength
of
the
rule. According
to
standard
fuzzy
system
description,
this
strength
depends
on
the
membership
value
of
each
Xi
in
the
corresponding
input
membership
functions /-LFji
and
more
specifically
[26],
a(x(t)) =
min[/-LFj1
(Xl
(k)),
...
/-LFj"
(xn(k))].
Then,
assuming
a
standard
defuzzification
procedure
(e.g. weighted average),
the
functional
representation
of
the
fuzzy
system
can
be
written
as
f(x(t))
= L
!J"
...
,jn
X
(I1)~"
...
,jn
(x(t))
(2)
Nonlinear Systems
in
Brunovsky Canonical Form: A Neuro-Fuzzy Algorithm 349
where
the
sumation
is carried over all
the
available fuzzy rules.
l)"
...
,
j"
is
any
constant
vector consisting
of
the
centers
of
fuzzy
partitions
of f d
ete
rmined
by
l
and
(I1)~"
...
,j"
(x(t)) is
the
IF
defined in (1) divided by
the
sum
of
all
IF
participating
in
the
summation
of
2.
Based
on
the
fact
that
functions
of
high
ord
er neurons are capable
of
approximating
discontinuous functions
[4
]
and
[12]
use high
order
neural
net-
work functions
HONNF's
in
order
to
approximate
an
IF. A
HONNF
is defined
as:
L
N(x(t); w, L) = L
Whot
II
p~j(hot)
(3)
hot
=l jEhot
where
hot
=
{h,
h ,
...
,
h}
is a collection
of
L
not-ordered
subsets
of
{1,2,
..
.
,n},
dj(hot)
are
non-negative integers. Pj
are
the
eleme
nts
of
the
following vector,
where
S denotes
the
sigmoid function defined as:
1
s(x) - a -
rv
- 1 +
e-{3x
I
(4)
(5)
with
a,
/3,
'I
being positive real numbers
and
W
:=
[Wl"
'WL]T
are
the
HONNF
weights. Eq. (3)
can
also be
written
as
L
N(x(t); w, L) = L WhotShot(X(t))
(6)
hot=l
where Shot(X(t))
are
high
order
terms
of
sigmoid functions of x.
Following
the
above
notation
(II)~,
,
..
,j"
in (2)
can
be
approximated
by
N
1
. (x) = N(x(t);wJJ ,···,jn;I,LJI,···,j
n;l
)
J1,···,]n
So, Eq. (2)
can
be
rewritten
as
~-l
I
f(x(t))
= L h ,
...
,jn
x N
j"
..
,jJx(t))
(7)
From
the
above definitions
and
Eq. (7)
it
is obvious
that
the
accuracy
of
the
approximation
of
f(x)
depends
on
the
approximation
abilities
of
HONNFs
and
on
an
initial
estimate
of
the
centers
of
the
output
membership
functions.
These
centers
can
be
obtained
by
experts
or
by off-line techniques
based
on
gathered
data.
Any
other
information
related
to
the
input
membership
functions is
not
necessary because it is replaced by
the
HONNFs.
3
Direct
adaptive
neuro-fuzzy
regulation
3.1
Problem
formulation
and
neuro-fuzzy
representation
Problem
formulation
We consider nonlinear
dynamical
syst
ems
of
the
Brunovski canonical form
350
D.
C.
Theodoridis,
Y.
Boutalis, and M. A. Christodoulou
::i;
= Aex + bc[j(x) + g(x) .
u]
(8)
where
the
state
x E Rn is
assumed
to
be completely
measured,
th
e
control
input
u E R, j
and
9
are
scalar nonlinear
functionS[O~~f
..
the
tate
f
ein
:
onl~oo~'
lll]-
volved in
the
dynamic
equation
of
x
n
.
Also, Ae = 0
o 0
o 0
and
be
=
[0
The
state
regulation
problem
is known
as
our
attempt
to
force
the
state
to
zero from
an
arbitrary
initial value
by
applying
appropriate
feedback
control
to
the
plant
input.
However,
the
problem
as
it
is
stated
above for
the
system
(8), is
very
difficult
or
even impossible
to
be solved since
the
j,
9
are
assumed
to
be
completely unknown. To overcome
this
problem
we assume
that
the
unknown
plant
can
be
describ
ed
by
the
following model arriving from a neuro-
fuzzy
repres
e
ntation
described below,
plus
a modeling
erro
r
term
w(x, u)
(9)
where x j ,
Xg
are
vectors
containing
the
centers
of
the
partitions
of
every
fuzzy
output
variable
of
j(x)
and
g(x) respectively,
determin
ed by
the
designer
and
Wj,
W;
are
unknown
weight matrices. 8
j,
8
g
are
sigmoidal vectors
containing
high
order
sigmoidal
terms terms
with
parameters
which also
determined
by
the
designer.
Therefore,
the
state
regulation
problem
is
analyzed
for
the
system
(9)
instead
of
(8). Since,
Wj
and
W;
are
unknown,
our
solution
consists of
designing a control law
u(Wj,
W
g
, x)
and
appropriate
update
laws for
Wj
and
Wg
to
guarantee
convergence
of
the
state
to
zero
and
in
som
e cases,
which will be
analyzed
in
the
following sections,
boundedness
of
x
and
of
all
signals in
the
closed loop.
The
following mild
assumptions
are
also imposed
on
(8),
to
guarantee
the
existence
and
uniqueness
of
solution for
any
finite initial
condition
and
u E U
c
.
Assumption
1.
Given a class U
e
C R
of
admissible
inputs,
then
for
any
u E U
e
and
any
finite initial condition,
the
state
traj
ecto
ries
are
uniformly
bounded
for a
ny
finite T >
O.
Meaning
that
we
do
not
allow
systems
processing
trajectories
which escape
at
infinite, in finite
time
T,
T being
arbitrarily
small. Hence, Ix(T) I <
00.
Assumption
2.
The
j,
9
are
continuous
with
resp
ect
to
their
arguments
and
satisfy a local Lipschitz
condition
so
that
the
solution
x( t)
of
(8) is
unique
for
any
finite initial condition
and
u E U
c
.
Nonlinear Systems ill Brullovsky Canonical Form: A Neuro-Fuzzy Algorithm
351
Neuro-fuzzy
representation
We
are
using
a fuzzy
approximation
of
the
system
in
(8), which uses
two
fuzzy
subsystem
blocks for
the
description
of
f(
x)
and
g(
x)
as
follows
f(x)
=
~
Xfl.
.
xNfl.
. (x)
~
}1,}2"",)n
J1,)2,·
·,)n
(10)
(11)
where
the
summation
is
carried
out
over
the
number
of
all available fuzzy
rules, N
f
,
N
g
are
appropriate
HONNF's
and
the
meaning
of
indices.
l
.
.
)1
,J2,···
,)n
has
already
been
described
in
Section
2.
In
order
to
simplify
the
model
structure,
since
some
rules
result
to
the
same
output
partition,
we
could
replace
the
NNs
associated
to
the
rules
hav-
ing
the
same
output
with
one
NN
and
therefore
the
summations
in
(10),(11)
are
carried
out
over
the
number
of
the
corresponding
output
partitions.
Therefore,
the
system
of
(8) is
replaced
by
the
following
equivalent
Brunovsky
form
Fuzzy
-
High
Order
Neural
Network
(F-HONN),
which
depends
on
the
centers
of
the
fuzzy
output
partitions
x
fi
and
x
gi
(12)
where
Npf
and
Npg
are
the
number
of
fuzzy
partitions
of
f
and
g respec-
tively.
Or
in
a
more
compact
form
(13)
where,
similar
to
(9),
xf,
Xg
are
vectors
containing
the
centers
of
the
parti-
tions
of
every
fuzzy
output
variable
of
f (x)
and
g( x) respectively,
sf
(x),
Sg
(x)
are
vectors
containing
high
order
combinations
of
sigmoid
functions
of
the
state
x
and
Wf,
Wg
are
matrices
containing
respective
neural
weights ac-
cording
to
(6)
and
(12).
The
dimensions
and
the
contents
of
all
the
above
matrices
are
chosen so
that
both
xfWfsf(x)
and
XgWgSg(x)
are
scalar.
For
notational
simplicity
we also
assume
that
all
output
fuzzy
variables
are
par-
titioned
to
the
same
number,
m,
of
partitions.
Under
these
specifications x f
is a 1 x m
row
vector
of
the
form
where
xfp
denotes
the
center
or
the
fuzzy
p-th
partition
of
f.
These
cen-
ters
can
be
determined
manually
or
automatically
with
the
help
of
a fuzzy
c-means
clustering
algorithm
as a
part
of
the
off-line fuzzy
system
struc-
tural
identification
procedure
mentioned
in
the
introduction.
Also,
sf(x)
=
[sj,(x)
s!k(x)f,
where
each
Sfi(X)
with
i = {1,2,
...
,k},
is a
high
352
D.
C.
Theodoridis,
Y.
Boutalis, and
M.
A. Christodoulou
order
combination
of
sigmoid functions
of
the
state
variables
and
Wf
is a
m x k
matrix
with
neural
weights.
Wf
can
be also
written
as
a collection of
column vectors
Wi,
that
is
Wf
=
[W}
Wi
Wi]'
where l =
1,2,
... ,
k.
Similarly,
Xg
is a 1 x m row vector
of
the
form
where x
gk
denotes
the
center
or
the
k-th
partition
of
g.
W
g
,
Sg(x)
have
the
same
dimensions as
Wf,
sf
(x) respectively.
3.2
Adaptive
regulation
with
modeling
error
effects
In
this
subsection
we
present
a
solution
to
the
adaptive
regulation
problem
and
investigate
the
modeling
error
effects
when
the
dynamical
equations
have
the
Brunovsky
canonical form. Assuming
the
presence
of
modeling
error
the
unknown
system
can
be
written
as
(9).
The
regulation
of
the
system
can
be
achieved by selecting
the
control
input
to
be
(14)
with
v =
kx
(15)
where k is a
vector
of
the
form k =
[k
n
...
k2
klJ
E R
n
be such
that
all
roots
ofthe
polynomial
h(s)
=
sn
+ k1s
n
-
1
+ ... + k
n
are
in
the
open
left half-plane.
Define now,
the
regulation
error
as
~
=-x
(16)
After
substituting
Eq.
(14)
to
the
n -
th
state
equation
of
Eq.
(9)
and
straightforward
manipulations
we
have
that
where ilc =
Ac
- bck is a
matrix
with
its eigenvalues
on
the
left
half
plane.
W
f
=
Wf
-
Wj
and
Wg
=
Wg
-
W;.
W
f
and
Wg
are
estimates
of
Wj
and
W;
respectively
and
are
obtained
by
update
laws which
are
to
be
designed
in
the
sequel. After
substituting
Eq. (16), (17) becomes
~
=
ilc~
+
bc[x
f
Wfs
f(x)
+
Xg
WgSg(x)u
- w(x,
u)J
(18)
To continue, consider
the
Lyapunov
candidate
function
v =
~e
p~
+
2~1
tr
{
Wf
T W
f
} +
2~2
tr
{
WJW
g
}
Where
P > 0 is chosen
to
satisfy
the
Lyapunov
equation
Pile
+
il~
P = - I
(19)

Nonlinear Systems
in
Brunovsky Canonical Form: A Neuro-Fuzzy Algorithm 353
If
we
take
the
derivative
of
Eq. (19)
with
respect
to
time
we
obtain
. 1 2 T -
V =
-211~11
+
~
PbcXfWfSf(X)
+
T - T
~
PbcXgWgSg(X)u-~
Pbcw(x,u)+
~1
tr
{
WfTW
f
} +
~2
tr
{
Wg
TW
g
}
Hence, if we choose
(20)
(21 )
V becomes
v
~
-~
11~112
+
11~llllPllllw(x,
u)11
(22)
It
can
be
easily verified
that
Eqs. (20)
and
(21)
after
making
the
appropriate
operations,
result
in
the
following weight
updating
laws
(23)
(24)
where
~
is
the
vector
defined in (16), u is a
scalar
and
11, 12
are
positive
constants
expressing
the
learning
rates.
The
above
equations
can
be
also
element
wise
written
as:
a) for
the
elements
of
Wf
(25)
or
equivalently
wj
=
-11~nPn
(xf)T
sf,
(x)
for
alll
=
I,
2, ... ,
k,
j =
1,
2,
... ,
m,
~n
is
the
n -
th
element
of
the
vector
~
and
P
n
is
the
last
n -
th
row
of
P.
b) for
the
elements
of
Wg
(26)
or
equivalently
WJ
=
-12~nPn
(Xg)T
Sg,
(x)u,
for all l =
1,2,
... , k
and
j =
1,2,
...
,m.
Furthermore,
we
can
make
the
following
Assumption.
Assumption
3.
The modeling error
term
satisfies
I
w(x,
u)
I~
e~
Ixi
+
e~
lui
where
e~
and
e~
are known positive constants.
Also, we
can
find
an
a priori
known
constant
e
u
> 0,
such
that
354
D.
C.
Theodoridis,
Y.
Boutalis, and M. A. Christodoulou
and
Assumption
3 becomes equivalent
to
where
£1
=
£~
+
£~£u
is a positive
constant.
Employing
Assumption
3, Eq. (22) becomes
v
:::;
-~
11~112
+
£1
11~llllPllllxll
since
Ilxll
=
II~II
then
Eq. (29) becomes
v
:::;
-~
11~112
+
£1
IIPIIII~112
:::;
-
(~
-
£1
IIPII)
11~112
(27)
(28)
(29)
(30)
Hence, if we chose
IIPII
<
2t
then
the
Lapyunov
candidate
function becomes
negative.
We
are
now
ready
to
prove
the
following
theorem
Theorem
1.
The
control law (14)
and
(15)
together
with
the
update
laws
(23)
and
(24)
guarantee
the
following
properties
• limt-+oo
~(t)
=
0,
limt
-+oo
x(t) = 0
provided
that
IIPII
<
2}!
and
Assumption
3 is satisfied.
Proof.
From
Eq. (30)
we
have
that
V E
Loo
which implies
~,Wj,
Wg
E Loo.
Furthermore
Wj
=
Wj
+
Wi
E
Loo
and
Wg
=
Wg
+
Wg
* E Loo. Since
~
E
Loo
this
also implies x E Loo. Moreover, since V is a
monotone
decreasing
function of
time
and
bounded
from below,
the
limt-+
oo
V(t)
=
Voo
exists so
by
integrating
V from 0
to
00
we have
which implies
that
I~I
E L
2
.
We also have
that
~
=
Ac~
+
bc[xj
WjSj(x)
+
Xg
WgSg(x)u -
w(x,
u)]
Nonlinear Systems
in
Brunovsky Canonical
Form:
A Neuro-Fuzzy Algorithm 355
Hence
and
since U E L
oo
,
the
sigmoidals
and
center
matrices
are
bounded
by
definition, W
f
,
Wg
E
Loo
and
Assumption
3 hold, so since
~
E
L2
n
Loo
and
~
E L
oo
,
applying
Barbalat's
Lemma
we conclude
that
limt->oo
~(t)
=
O.
Now, using
the
bounded
ness
of
u,
sf(x),
Sg(x), x
and
the
convergence
of
~(t)
to
zero, we have
that
Wf,
Wg
also converge
to
zero. Hence we have
that
limt---+oo
x(t) =
-limt->oo
~(t)
= 0
Thus,
limt---+oo
x(t) =
O.
Remark
1.
We
can't
conclude
anything
about
the
convergence
of
the
synaptic
weights
Wf
and
Wg
to
their
optimum
values
Wi
and
W;
respectively from
the
above analysis.
The
existence
of
signal u is
associated
with
conditions
which
guarantee
that
XgWgSg(x) #
O.
It
can
be
shown
that
using
appropriate
projection
method
[9],
the
weight
updating
laws
can
be
modified so
that
the
existence
of
the
control
signal
can
be
assured.
However,
this
development
is
not
presented
in
this
chapter.
The
relevant
results
along
with
the
ones given
here
are
to
be
presented
shortly
in a
forthcoming
work.
4
Simulation
results
To
demonstrate
the
potency
of
the
proposed
scheme we
present
two simula-
tion
results.
One
of
them
is
the
well
known
benchmark
"Inverted
Pendulum"
and
the
other
one is
the
"Van
der
pol" oscillator.
Both
of
them
present
com-
parisons
of
the
proposed
method
with
the
well
established
approach
on
the
use
of
RHONN's
[21].
The
comparison
shows off
the
regulation
superiority
of
our
method
under
the
presence
of
modeling errors.
4.1
Inverted
pendulum
Let
the
well known
problem
of
the
control
of
an
inverted
pendulum.
Its
dynamical
equations
can
assume
the
following
Brunovsky
canonical
form
[22]
.
rnlx~
cos
Xl
sin
Xl
gSlnxl
'Tnc+
rn
X2
= -
1(1-
=C08
2
Xl)
3
rHC+rn
~
+
=C+
m
U + d
(
4
=c082
"")
I
'3-
rrtC+
m
with
d =
5X2
+ 10sin(lOx2) +
sin(2u)
(31)
where
Xl
= e
and
X2
=
iJ
are
the
angle from
the
vertical
position
and
the
angular
velocity respectively. Also, 9 = 9.8
m/
S2
is
the
acceleration
due
to
356
D.
C.
Theodoridis,
Y.
Boutalis, and
M.
A.
Christodoulou
gravity, me is
the
mass of
the
cart,
m is
the
mass of
the
pole,
and
I is
the
half-length
of
the
pole. We choose me = 1 kg, m = 0.1
kg,
and
I = 0.5
min
the
following simulation.
It
is
our
intention
to
compare
the
direct control abilities
of
the
proposed
Neuro-Fuzzy
approach
with
RHONN's
[21]
(page 62-71). We also, make
the
appropriate
changes
to
RHONN's
in
order
to
be
equivalent
with
F-HONNF
's
(brunovsky form) for comparison
purposes
.
For
the
proposed
F-HONNF
approach
we use
the
adaptive
laws which
are
described by Eqs. (23)
and
(24)
and
the
control law described by Eqs. (14)
and
(15). Numerical
training
data
were
obtained
by using Eqs. (31)
with
initial conditions
[Xl
(0)
X2(0)]
=
[-
;2
0]
and
sampling
time
10-
3
sec.
We
are
using
the
proposed
approach
with
Eq
. (13)
to
approximate
In-
verted
Pendulum
dynamics
and
send
data
to
sigmoidal terms.
Our
Neuro-
Fuzzy model was chosen
to
use 5
output
partitions
of
f
and
5
output
partitions
of
g.
The
number
of
high
order
sigmoidal
terms
(HOST) used in
HONNF's
(for
F-HONNF
and
RHONN) were chosen
to
be
5:
(s(xd,
S(X2),
s(xd
.
S(X2)'
s2(xI),
S2(X2)).
In
order
the
proposed
model
to
be
equivalent
with
RHONN's
regarding
to
other
parameters
except
the
initial weig
hts
(Wf(O) = 0
and
Wg(O)
= 1 for
F-HONNF
and
Wf(O) = 0
and
Wg(O)
= 0.016 for RHONN) we have chosen
the
updating
learning
rates
1'1
= 5
and
1'2
= 1
and
the
parameters
of
the
sigmoidal
terms
such as
al
= 0.1,
a2
= 3, b
l
= b
2
= 1
and
Cl
= C2 =
O.
Also,
after careful selection, kl
= 2
and
k2
= 80 . Fig. (1) shows
the
regulation
of
states
Xl
and
X2 (with blue line for
F-HONNF
and
red line for
RHONN's),
while
fig.
(2) gives
the
evolution
of
control
input
u,
the
errors
el,
e2
and
the
modeling
error
d(X2'
u)
respectively.
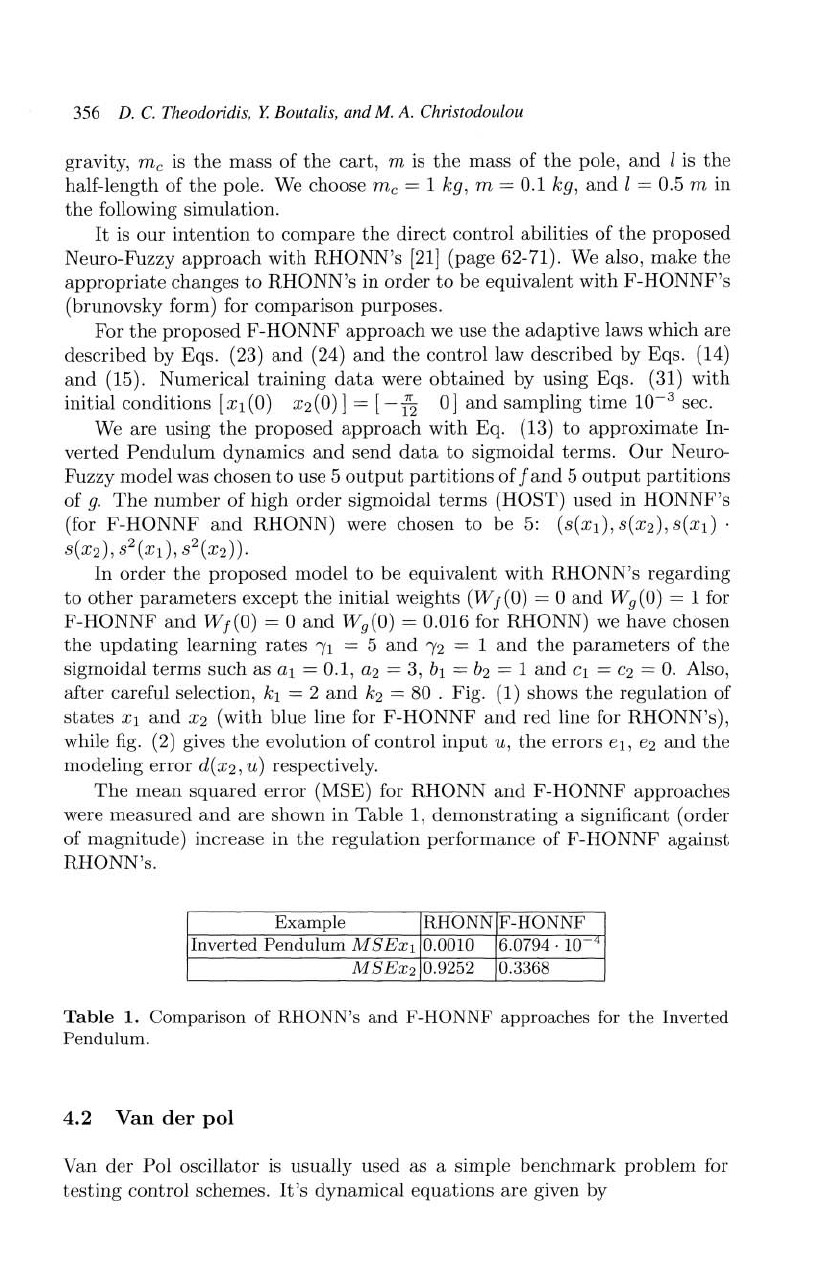
The
m
ean
squared
error
(MSE) for
RHONN
and
F-HONNF
approaches
were
measured
and
are
shown in Table
1,
demonstrating
a significant (order
of
magnitude)
increase in
the
regulation
performance
of
F-HONNF
against
RHONN's.
Example
RHONN
F-HONNF
Inverted
Pendulum
MSExj
0.0010
6.0794
. 10 - 4
MSEx2
0.9252 0.3368
Table
1.
Comparison
of
RHONN's
and
F-HONNF
approaches
for
the
Inverted
Pendulum.
4.2
Van
der
pol
Van
der
Pol
oscillator is usually used as a simple be
nchmark
probl
em
for
test
ing control schemes.
It's
dynamical e
quations
are
given by
Nonlinear Systems in Brunovsky Canonical Form: A Neuro-Fuzzy Algorithm 357
0.2
,\
II
x
0.1
jll\A
* 0
~~~~~~~~-----------1
(J5
II
-0.1
~
-0.2
o
2
3 4
5
4
1
1\
.
il
';i 2
II,.
* 0
mly:0,\P\iXX'7VV'''XI''NV~v'''A-~~-
(J5
-2
,Ii
V
-4
\/
V
_6L---
__
L-
______
~
______
~
______
~
______
~
o
2
3 4
5
Time (sec)
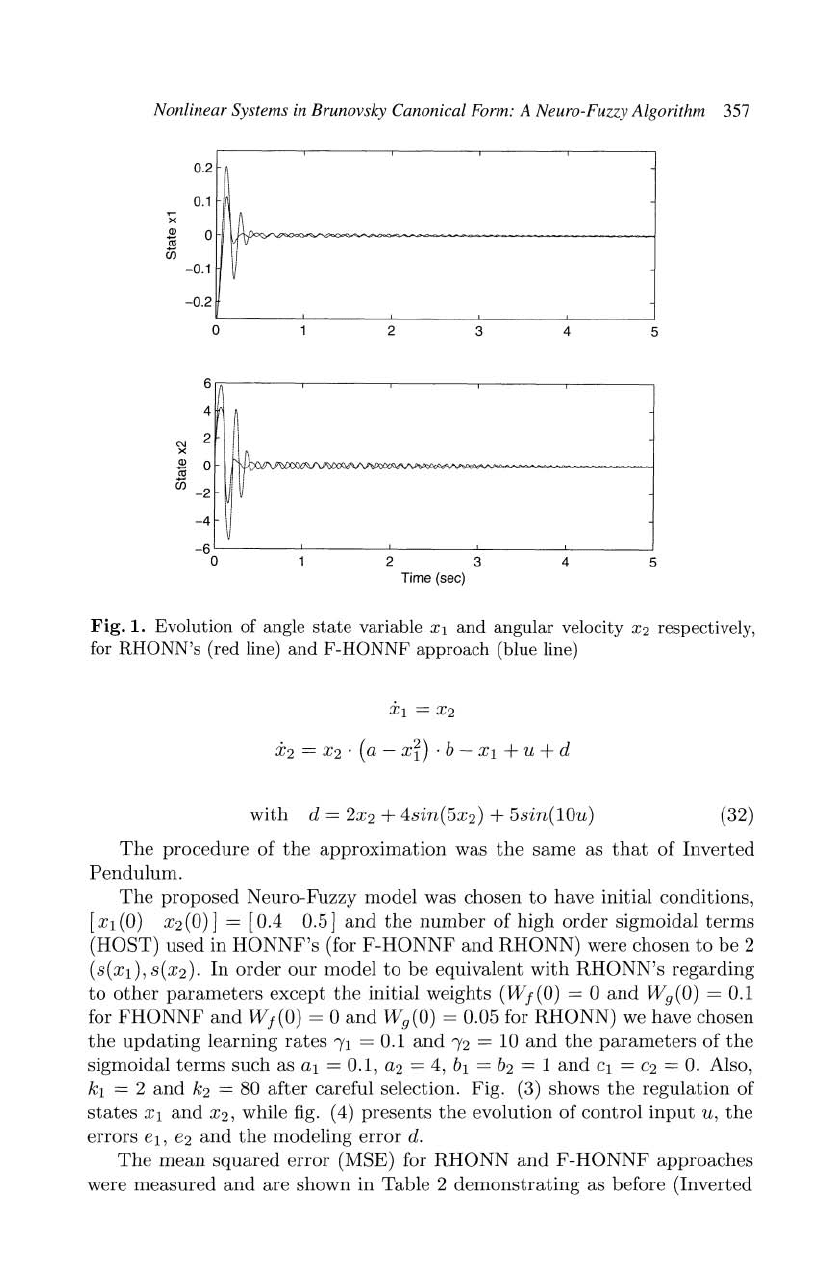
Fig.
1.
Evolution
of angle
state
variable
Xl
and
angular
velocity
X2
respectively,
for
RHONN's
(red
line)
and
F-HONNF
approach
(blue
line)
X2
=
X2
.
(a
- xi) . b -
Xl
+ U + d
with
d =
2X2
+ 4sin(5x2) + 5sin(10u)
(32)
The
procedure
of
the
approximation
was
the
same
as
that
of
Inverted
Pendulum.
The
proposed
Neuro-Fuzzy model was chosen
to
have initial conditions,
[Xl
(0) X2(0)] = [0.4 0.5]
and
the
number
of
high
order
sigmoidal
terms
(HOST) used in
HONNF's
(for
F-HONNF
and
RHONN)
were chosen
to
be
2
(s(xd,
S(X2)' In
order
our
model
to
be
equivalent
with
RHONN's
regarding
to
other
parameters
except
the
initial weights (Wf(O) = 0
and
Wg(O)
= 0.1
for
FHONNF
and
Wf(O) = 0
and
Wg(O)
= 0.05 for
RHONN)
we have chosen
the
updating
learning
rates
{I
= 0.1
and
{2
= 10
and
the
parameters
of
the
sigmoidal
terms
such as
al
= 0.1,
a2
= 4, b
I
= b
2
= 1
and
CI
= C2 =
O.
Also,
kI = 2
and
k2
= 80
after
careful selection. Fig. (3) shows
the
regulation
of
states
Xl
and
X2,
while fig. (4)
presents
the
evolution
of
control
input
u,
the
errors
eI,
e2
and
the
modeling
error
d.
The
mean
squared
error
(MSE) for
RHONN
and
F-HONNF
approaches
were
measured
and
are
shown in Table 2
demonstrating
as
before (Inverted