Skiadas C.H., Dimotikalis I. (editors) Chaotic Systems: Theory and Applications
Подождите немного. Документ загружается.

128
Nonlinear System's Synthesis - The Central
Problem
of
Modern Science and Technology:
Synergetics Conception. Part II: Strategies
of
Synergetics Control
Anatoly A. Kolesnikov
Technological Institute
of
Southern Federal University
Synergetics and Control Processes Department
44, Nekrasovky str., Taganrog, 347928, Russia
(e-mail:
anatoly
.kolesnikov@gmail.com)
Abstract:
Our environment, such
as
natural, social, economics and engineering
ones are the world
of
complex supersystems
of
various natures. These systems are a
collection
of
various subsystems providing defined functions and interconnected by
processes
of
forced dynamics interaction and exchange
of
power, matter and
information. These supersystems are nonlinear, multidimensional and multi linked.
And
in
these systems are complex transients and have place
of
critical and chaotic
modes. Problems
of
system synthesis, i.e. finding
of
common objective laws
of
control processes
in
such a dynamics system are much actual, complicated and,
in
many respects, practically inaccessible for present control theory.
In
the report we consider fundamental basis
of
nonlinear theory
of
system's
synthesis based on synergetics approach
in
modern control theory
as
well
as
its
application
[1
,2
].
The report consists
of
three parts: Part I General statements; Part II Strategies
of
synergetics control; Part III Synergetics synthesis
of
nonlenear systems with state
observers.
Keywords: synergetics, system's synthesis, invariants, nonlinear systems, regulator'S
design, chaotic disturbances
Directed selforganization implies control strategy that forms and
keeps dynamic invariants either belonging
to
the system or external ones.
Depending on the control aim, the invariants can be constant or changing
causing stabilization or a new dynamic state respectively. Talking Biology,
in
the first case the system's invariants realize stabilizing selection, and
in
the
second case - dynamic selection. In other words, purposeful forming
of
dy-
namic invariants allows
to
perform purposive selforganization
in
the system.
In
order to apply the ideas
of
Synergetics in control theory, it is neces-
sary to keep the conceptual correspondence to the main qualities
of
selfor-
ganization: nonlinearity
- open systems - coherence. For control tasks the
most important quality is that the system must be open.
Strategies
of
Synergetics Control 129
In
the initial statement the control system is described by the differen-
tial equations
of
the object
x{t)=F{x,u,q,M)
(1)
It
includes state coordinates
x{t)
and some external forces consisting
of
sought controls
u{t),
setting actions q{t) and possibly the disturbing actions
M{t).
In
order to move from the system "object - external forces" to forming
the self-organization equations
we
must exclude these forces in an appropri-
ate way. To do that we should extend the initial equations
of
the system "ob-
ject
- external forces" in such a way that excluded forces would become in-
ternal
for the system. So for the new extended system its equations can be-
come the se/forganization equations. I.e.
as
a result
of
this extension
we
can
move to organization
of
the system to its selforganization.
Such an extension takes place in the existing formulation
of
the con-
trol system synthesis problems, i.e. finding the control laws as a function
of
state coordinates
of
the extended system. These laws are the equations
of
the
regulator and they should ensure the desired dynamic qualities
of
the closed-
loop system
"object - control law (regulator)". Then we can apply relations
characterizing the self-organization processes to the system
("object - regula-
tor") according to the qualities mentioned above.
So in order to apply the synergetic approach based on cooperative
processes
of
selforganization to the control problems.
It
is necessary to move
from initial control task including the object's equations and external forces
(as control, setting and disturbing actions) to extended task statement, where
the mentioned forces become
internal interactions
of
the closed-loop system.
To do this we should present the external setting
q{t) and disturbing M{t)
actions as solutions
of
some additional differential equations describing the
informational model. Doing this
we
perform their "submerging" into the gen-
eral structure
of
the extended system. Then the control problem should be
formed as a task
of
search for interaction laws between the components
of
the extended system ensuring appearing
of
selforganization processes. Spe-
cifically, this problem comes down to synthesis
of
appropriate closed-loop
control laws
U(XI'
...
' x
n
'
wI'
...
'
w,ll)
as a function
of
state coordinates
of
the
extended system. Here
WI'
...
'
W,ll
- coordinates
of
the corresponding infor-
mational models
of
the setting and disturbing actions written as additional
differential equations.
Then giving energy or matter to such system
we
can create an unbal-
anced situation necessary for emerging
of
directed self-organization proc-
esses. The mentioned extension
of
the initial system and forming the self-
organization equations allows to set a connection between the ideas
of
Syn-
ergetics and the problem
of
synthesis
of
nonlinear control systems basing on
invariant relations. This means that synergetic control theory is the theory
of
synthesis
of
closed-loop control systems based on forming the cohered coop-
erative processes in the systems
of
various nature.
130 A. A. Kolesnikov
According
to
the mentioned qualities
of
self-organization and to the state
flow compression-decompression principle
of
the phase flow [1,2] the basic
statements
of
the synergetic approach to the synthesis
of
nonlinear dynamic
systems are:
• firstly, forming the extended system
of
differential equations reflecting
the processes
of
achieving the set values, suppressing the disturbances,
optimization, coordinate observing etc.
• secondly, synthesis
of
such "external" controls that ensure the reduction
of
the extra degrees
of
freedom
of
the extended system with respect to
the final manifold where the motion
of
the representing point is de-
scribed by the equations
of
the system's "internal" dynamics.
• thirdly, synthesis
of
"internal" controls by means
of
forming the links
between the "internal" coordinates
of
the system. These links ensure the
reaching
of
the control aim.
The stated basic principles
of
the synergetic approach lead to the it's stages
shown below. First
we
write the initial differential equations
of
the object,
e.g. in the following form:
Xk
(t) =
Ik
(XI , ...
,xn)
+ M k
(t);k
=
1,2,
...
,m
-1;
m:::;
n,
xk+1
(t) =
1k+1
(XI , ...
,x
n
)
+
uk+1
+ M
k+1
(t); (2)
where:
xI"",x
n
-
object's state coordinates,
uk+i"",u
n
-
controls,
M k (t),
...
,M
n (t) - disturbances,
k
=
1,2,
...
,m-l,
m:::;
n
..
Then we add
/1
equations connected to the problem
of
prediction and sup-
pression
of
disturbances in the system (2).
Wj
(t) =
g;C
WI
,
.•.
, W
J1
,XI
, ...
,x
n
),
j =
1,
...
,/1
When
we
build these equations, we face two independent and important
tasks. First, the task
of
describing the real disturbances M k (t), ...
,M
n
(t)
as
specific solutions
of
some differential equations. Second, the task
of
forming
the links between the equations
of
the initial object
(l)
and the equations
of
the disturbances.
After the selection
of
the links equations
we
get the extended system
of
differential equations
W j
(t)
= g i
(WI
, ... , W J1'
XI"'"
Xn);
Xi
(t) =
Ii
(XI"'"
Xn) + Wi;
X
i
+
1
(t) = li+1
(XI"'"
Xn) +
Wi+1
+ U
i
+
l
;
xn(t)=ln(xI"",Xn)+W
n
+u
n
'
where j =
1,
...
,/1;
i =
/1
+ I,
...
,m
-1.
(3)
Strategies
of
Synergetics Control
131
Equations (3) allow to set the synthesis task
of
control laws
ui+l,,,,,u
n
allowing to suppress the disturbances M k
(t),
...
,M
n
(t)
and ensuring the set
dynamic qualities
of
the closed-loop system. It is necessary to synthesize
such a control vector
u(u
l
,
.•. ,u
m
)
that would ensure motion
of
the represent-
ing point
(RP)
of
the extended object (3) from and arbitrary initial state (in
some allowed area), first, to some manifolds
'l'S(Xl"",Xn,Wl"
"
'W,u)
==0 and
then to the set state, e.g. origin point
of
the extended state space. On the tra-
jectories
of
the closed-loop system motion minimum
of
some optimizing
functional can be reached or some prime performance criteria can be satis-
fied. Asymptotic stability in some area or
in
the large must be ensured.
In the report we mention that
RP motion
of
the synthesized system
must satisfy the following system
of
functional equations:
Tslfrs
(t) +
CPs
('I's)
==
0, s
==
1,2, ...
,m.
(4)
Functions
CPs('I's)
in (4) are selected in such a way that: asymptotic stabil-
ity in the large with respect to
'l's
==
0 and 'l's
==
B is ensured
in
the system
(4); the desired performance criteria
of
RP's movement to the attracting mani-
folds
'l's
(Xl
, ...
,X
n
,
WI
, ... , W,u)
==
0,
s
==
1,2, ... ,m
where
'l's - some aggregated variables.
There are no special limitations put on the selection
of
functions (4).
It
is important to underline that macro-variables 'l's reflect synergetic (coop-
erative, coherent) qualities
of
the synthesized multi-level systems. This
means that it would be rather reasonable to use the known laws
of
the natural
systems, which manifest the qualities
of
coherence and cooperative activities.
We will
be
using synergetic ideology in order
to
solve the stated task. This
method means that the
RP
of
the system gets to the intersection
of
manifolds
'1'1
==
O,·
·
·,'I'm
==
0 as a result
of
action performed by "external" controls
u
i
+
l
"",u
n
. Moving along the intersection is described by the following equa-
tions
of
"internal" dynamics
WjIl'U)
==
g
j(W11I"''''
w,ull"
vi+I"'"
VII'
XIII"''''
Xm-III');
Xill'(t)
==
fi(X11I"''''
xm-lll" Vi+l , ... ,
VII)'
where Vi+l , .•. , vn - "internal" controls, j
==
l,
...
,,ll,
i
==
,ll +
l,
...
,m
-1
.
(5)
Considering the decomposed system (5) having the order
of
n
+,ll
- m ,
we
synthesize "internal" controls Vi+l , .•. , VII ensuring the dynamic
qualities
of
RP's motion along the intersection
of
manifolds
'1'1==
0,
..
.
,'1'
m==
0 .
Synthesis
of
controls vi+l , •.. , VII is a separate task
of
controlling the subobject
(5). Consecutive-series totality
of
invariant manifolds is used for this pur-
pose.
132
A.
A.
Kolesnikov
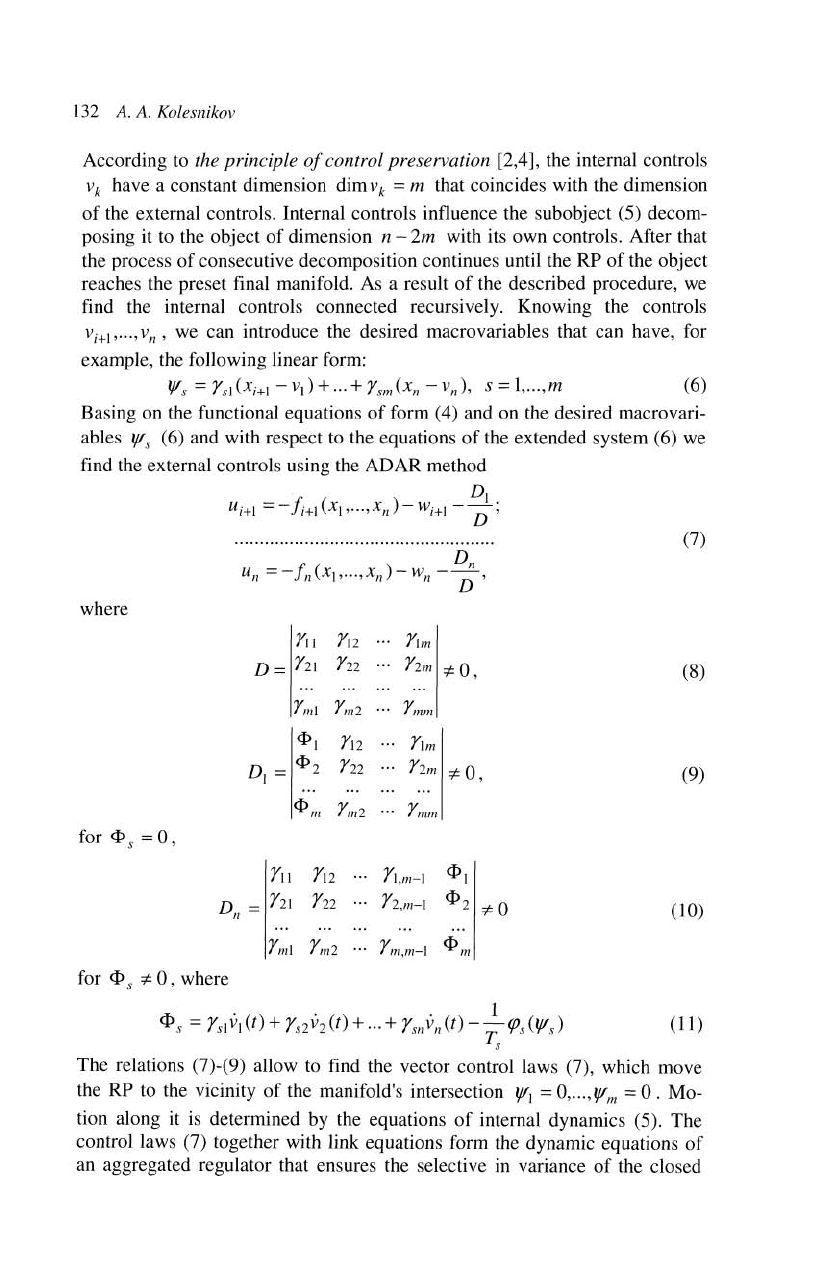
According to the
principle
of
control
preservation
[2,4], the internal controls
vk
have a constant dimension dim v
k
= m that coincides with the dimension
of
the external controls. Internal controls influence the subobject (5) decom-
posing it to the object
of
dimension n - 2m with its own controls. After that
the process
of
consecutive decomposition continues until the RP
of
the object
reaches the preset final manifold. As a result
of
the described procedure, we
find the internal controls connected recursively. Knowing the controls
Vi+l
, ... , vn ' we can introduce the desired macrovariables that can have, for
example, the following linear form:
If/
s
=
Y.d(X
i
+
1
- VI)
+
...
+
Ysm(x
n
- v
n
),
s = l, ...
,m
(6)
Basing on the functional equations
of
form (4) and on the desired macrovari-
abIes
If/
s
(6) and with respect to the equations
of
the extended system (6) we
find the external controls using the ADAR method
where
for
<I>
s =
0,
Dl
u
i
+l
=-fi+l(xl,···,x
n
)-W;+I--;
D
YII
YI2 Ylm
D=
Y21
Yn
Y2m
:;to,
YmI
Ym2
Ymm
<1>1
YI2
Ylm
Dl
=
<1>2
Y22
Y2m
:;to,
<l>m
Y
m
2 Y
mm
Yll
Y12
YI.m-l
<1>1
Dll =
Y21
Y22
Y2,m-I
<1>2
:;to
Yml
Y
m
2
Ym,m-l
<1>",
for
<I>
s :;t
0,
where
<I>
s =
Yd
VI
(t)
+ Ys2
V
2 (t) +
...
+ YsnVn
(t)
- ; qJs(lf/s)
s
(7)
(8)
(9)
(10)
(1)
The relations (7)-(9) allow to find the vector control laws (7), which move
the
RP to the vicinity
of
the manifold's intersection
If/l
=
O,
...
,lf/m = 0 . Mo-
tion along it is determined by the equations
of
internal dynamics (5). The
control laws (7) together with link equations form the dynamic equations
of
an aggregated regulator that ensures the selective in variance
of
the closed
Strategies
of
Synergetics Control
133
loop system (3)-(7) to the disturbances M k (t), ... , M n
(t).
It
also provides
asymptotic motion stability and the desired qualities
of
transients.
From the point
of
view
of
the problem
of
synthesis
of
control laws, the
differences
of
the developed new approach are as follows. First, shift
of
the
main attention to the behavior
of
the system on the attractors. This allows to
decompose the system and therefore to simplify
it.
It
lets
us
focus our atten-
tion on the stable asymptotic motion modes. Second difference is in
cascade
synthesis
of
parallel-consecutive group
of
internal controls, i.e. dynamically
tied links
of
the synthesized system. When we use a synergetic approach,
there is
an
internal process
of
self-control
in
the synthesized system, when
the a cascade sequence
of
internal controls compressing the volume
of
the
phase flow is formed. This is performed starting from the external maximal
possible area and going through the enclosed one into the other internal areas
until the
RP gets to the desired state
of
the system.
The new synergetic approach allowed to perform a certain break-
through in the area
of
synthesis
of
multiply connected systems
of
continuous,
discontinuous, discrete-time, selective-invariant, multicriterial, terminal and
adaptive control for nonlinear dynamic objects
of
various nature [1-4]. This
approach found a specific application for solution
of
complex problems
of
control
of
nonlinear technical objects (flying apparatus, turbogenerators, ro-
bots, electric drives, technological aggregates etc.) and
in
the control tasks
of
ecology, biotechnology etc.
References
[1]
Ko1esnikov
AA
Synergetics control theory. Moscow: Energoatomizdat, 1994.
[2]
A.A. Kolesnikov, et
a!.
Modern applied control theory. Under ediotion
of
A.A
Kolesnikov. Moscow-Taganrog: Integracia-TSURE pub!, 2000.
[3]
Kolesnikov
AA,
Balalaev N.V. Synthesis
of
Nonlinear Systems with State Ob-
servers, II New Concepts
of
the General Control Theory: Collection
of
scientific
worksl Under edition
of
AA
Krasovsky. Taganrog: TSURE, pp. 101-115.
[4]
Kolesnikov
AA.
Sequential optimization
of
nonlinear aggregated control sys-
tems. Moscow: Energoatomizdat, 1987.
134
Synergetic Approach to Traditional Control Laws
Multi-Machine Power System Modification
Anatoly
A.
Kolesnikov
l
and Andrew
A.
Kuzmenko
Technological Institute
of
Southen Federal University
Synergetics and Control
Processes Department
44, Nekrasovky str., Taganrog, 347928, Russia
I (e-mail:
anatoly.kolesnikov@gmail.com)
Abstract: Traditional algorithms for control power system that were proposed
more than half a century ago are applied
in
our days. We propose principally new
synergetics laws for frequency and power for power station units and unit groups.
This approach requires development
of
technique for application. Moreover, directed
implementation
of
synergetics control laws require global rebuilding
of
existing
patterns
of
power units control. The simplest way
of
synergetics algorithms
implementation
is
by using hierarchical principal
of
control system building. So
we rate synergetics control laws
as
dynamical desired values for ordinary algorithms
or
as
correcting signals [1].
Keywords: power system, synergetics control, regulator, modificated control law.
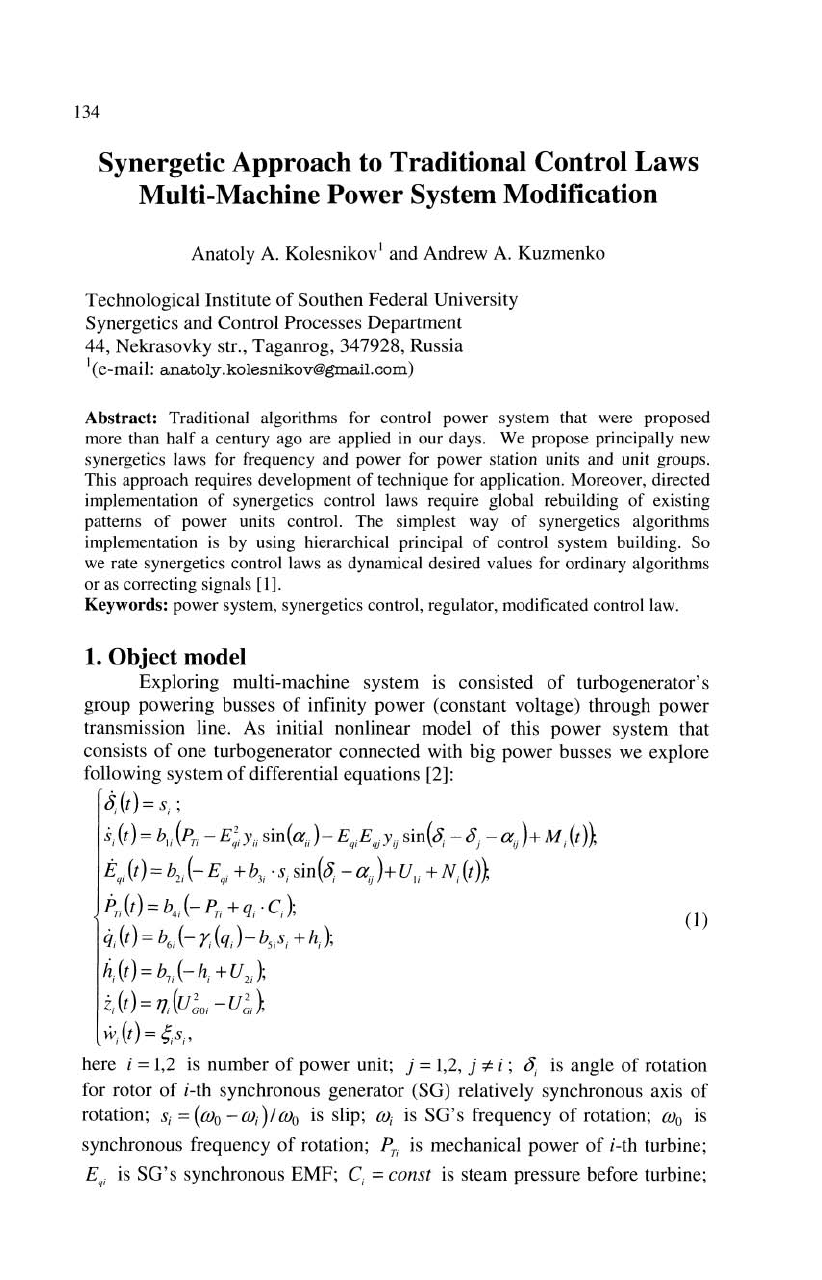
1. Object model
Exploring multi-machine system is consisted
of
turbogenerator's
group powering busses
of
infinity power (constant voltage) through power
transmission line.
As
initial nonlinear model
of
this power system that
consists
of
one turbogenerator connected with big power busses
we
explore
following system
of
differential equations [2]:
j(t}=s ..
ii'
S
(t)
=
bl.(~r·
-
E2y
..
sin
(a.
}-
E
.E
.y
..
sin(o - 0 -
a)+
M.(t}l.,
I I I ql
/I
II
ql
qJ
/)
I J
Ij
I
f,
EJt}
= b"
(-
E
q
, + b
3
, •
s,
sin(~
-
aij
)+U
1
,
+ N,
(t)},
P
r
,
(t)
= b
4
,
(-
P
Ti
+
q,
.
C,
);
q,{t}
= b
6
,
(-
r,
(q,)
-
bs,s,
+
h,);
h,(t}
= b
7i
(-
h,
+UJ;
z,
(t)
=
17,
(U
~o,
-
U~,},
w,(t}
=
~s"
(1)
here i =
1,2
is number
of
power unit; j =
1,2,
j
*-
i;
0,
is
angle
of
rotation
for rotor
of
i-th synchronous generator (SO) relatively synchronous axis
of
rotation;
Si
=
(wo
- W
i
)/
Wo
is slip;
Wi
is SO's frequency
of
rotation; Wo is
synchronous frequency
of
rotation; P
r
,
is mechanical power
of
i-th turbine;
E
q
,
is
SO's
synchronous EMF;
C,
= const
is
steam pressure before turbine;
Synergetic Approach 135
q; is actuating valve solenoid shift controlling power medial (steam) entry
into turbine;
r,
(q;)
is function accounting limitation
of
solenoid shift; h; is
signal from turbine speed secondary controller;
VI;
is voltage applied to SO
excitation wiring; V
2
;
is
control action to turbine speed secondary controller;
b];, b
2
;,
b
3
; ;
b
4
;,
b
s
;,
b
6
; ,
b
7
;
are constant factors; Yu = y
p'
au
= a
p
are SO
mutual conductance and its additional angles; w;
is
estimation
of
unmeasured disturbances
disturbances
N;
(t)
=
No;
.
M;
(t)
= M
0;;
z;
is estimation
of
unmeasured
In model
(1) two last equation are models
of
external piecewise
constant disturbances acting SO excitation subsystem N;
(t)
and power
system from load's side. According to terms
of
Synergetics control theory the
model
(1) is design model (system's extended model).
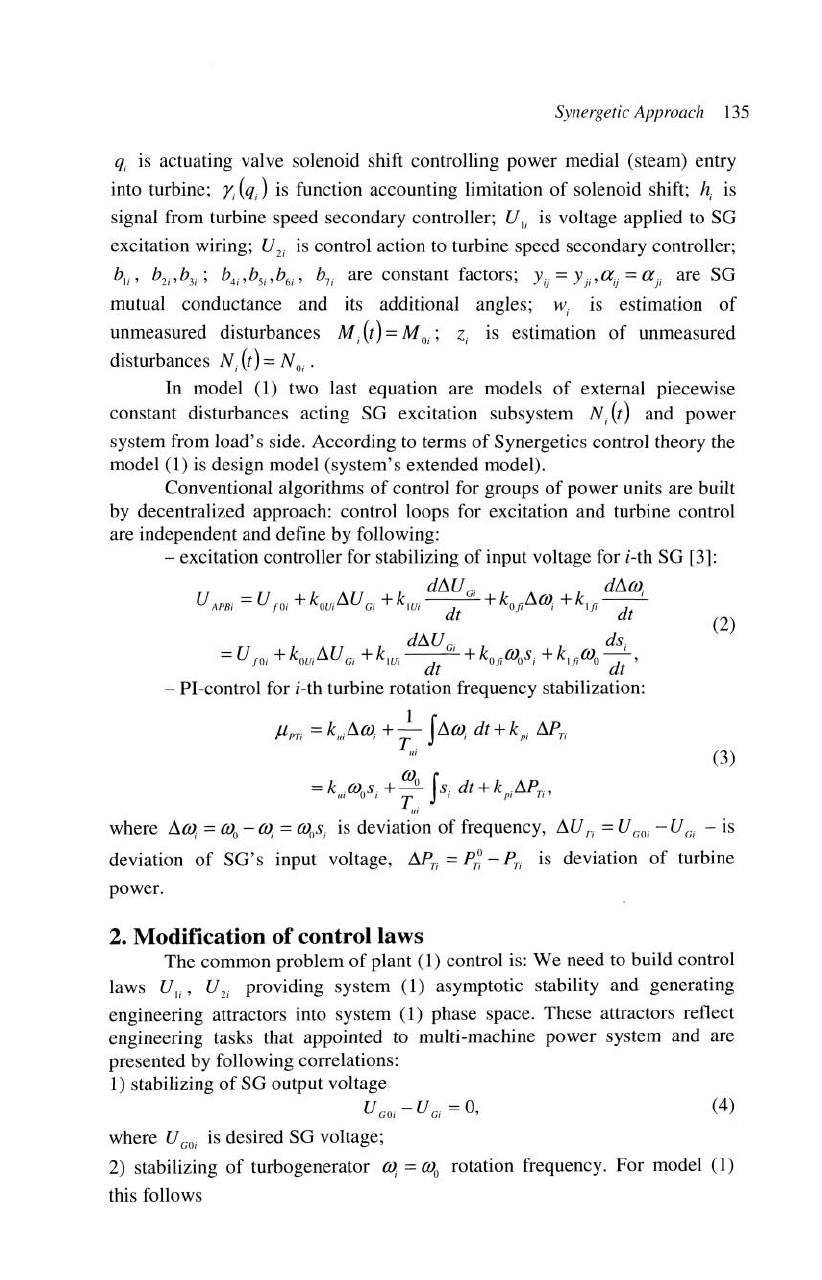
Conventional algorithms
of
control for groups
of
power units are built
by decentralized approach: control loops for excitation and turbine control
are independent and define by following:
- excitation controller for stabilizing
of
input voltage for i-th SO [3]:
dllV
c;
dllOJ;
V APE; = V
/0;
+ kou;llV c; + k
lU
;
-----:it
+
kofillf»;
+
klfi
----;;;-
(2)
dllV
c
;
ds;
= V
/,,;
+
ko
u;
llV
c; + k
lU
;
-----:it
+
kOfiOJOs;
+
kl
fi
OJ
O
dt'
- PI-control for i-th turbine rotation frequency stabilization:
fin;
=
k,,;llOJ;
+ ;,; f
llOJ;
dt + k p;
llPr;
(3)
=
k,,;OJos
; +
~:
f S; dt + k,,;llP
TP
where
ll~
=
OJ
o
-
~
=
OJos;
is deviation
of
frequency,
llV
r;
= V GO; - V G; - is
deviation
of
SO's
input voltage, Mr; =
PT~
-
PI;
is deviation
of
turbine
power.
2. Modification
of
control laws
The common problem
of
plant
(I)
control
is:
We need to build control
laws
v];,
V
2
;
providing system
(1)
asymptotic stability and generating
engineering attractors into system (1) phase space. These attractors reflect
engineering tasks that appointed
to
multi-machine power system and are
presented by following correlations:
1)
stabilizing
of
SO output voltage
U GO; - U G; =
0,
(4)
where V GO; is desired SO voltage;
2)
stabilizing
of
turbogenerator
~
=
OJ
o
rotation frequency. For model
(l)
this follows
136
A. A. Kolesnikov and
A.
A. Kuzmenko
Si
=0.
(5)
In details the procedure
of
synergetics synthesis for power system
turbo generators control laws
is
presented in [1]. Let
us
introduce modified
law
of
SO excitation control as:
Vii
= U
APBi
+ U
S
l'l1i
'
(6)
here U
APBi
is defined by (2), and
U,yni
is synergetics additive component
providing implementation
of
engineering attractor (4):
F,s
i
+
/32lr(U~Oi
-U~,)+;
Iffli
U"ni=E-b's.sin(O-a)-
I,
(7)
ql
31 I I
12
F
2
b
2i
Where:
F;
=
2E
qi
V'Y12
X
di
(sin
(<5,
- a
,2
)-
YiiX
di
sin(oi - a
'2
+ a,,}),
F,
= -2AiE'/i - 2Bi (Oi)'
Iffli
=
U~Oi
-
U~i
+
/32iZi
'
U
Gi
= J
E'~iAi
+ 2Bi
(<5,
)E"i
+
Di
,
Ai
=
1-
2Yii
X
di
cos(aJ+
(YiiXdJ '
Bi
(<5,)
=
U,Y,2Xd,(COS(<5,
-
a,J-
YiXdi
cos(<5,
- a
'2
+
aJ),
Di
=
(U,Y,2
X
dJ
.
Turbine control modified law is control law
(3) in which we used
following dynamics equation as power preset value
PT~:
PT~
=
E:
i
Y
ii
sin(a
ii
)+
EqiEqj
Y
,2
sin(<5,
-
OJ
- a
,2
)-
-W(~-IJ-S.(_1
+&J,
,
';i
b
li
T
2i
'bliT"
b
li
(8)
here j =
1,2,
j * i .
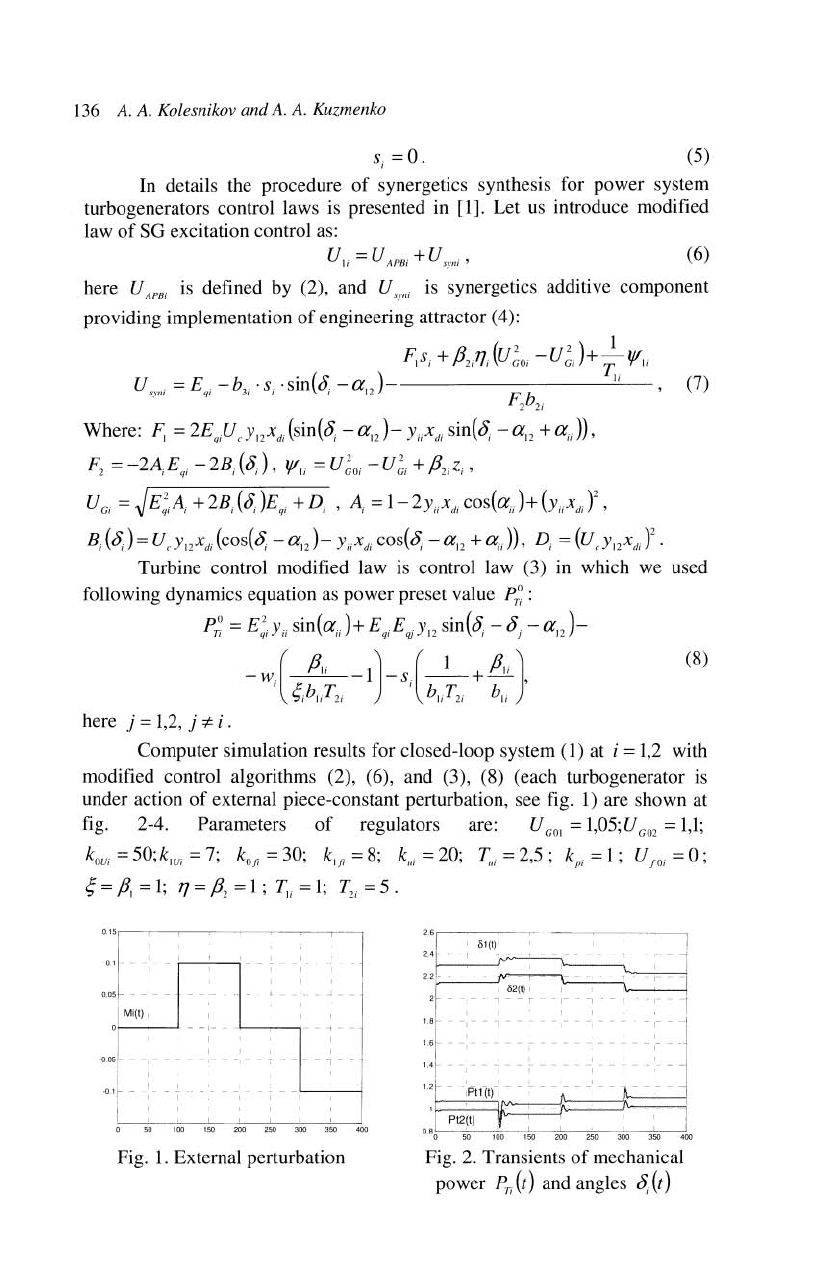
Computer simulation results for closed-loop system (1) at i =
1,2
with
modified control algorithms
(2), (6), and (3), (8) (each turbo generator is
under action
of
external piece-constant perturbation, see fig. 1) are shown at
fig. 2-4. Parameters
of
regulators are: U GOI =
1,05;
U G02 =
1,1;
k
OUi
=
50;klUi
=
7;
kof'
= 30;
kif'
=
8;
k
ni
= 20;
T,'i
=
2,5;
k
pi
= 1; U
roi
=
0;
,;
=
/3,
=
1;
1J
=
/32
= 1 ;
~i
=
1;
T"
= 5 .
Fig.
1.
External perturbation
,.61
61(1)'
::f
.
:
-1
2==1=::=J
I
I
1.6-
-
-1-
- - - -
I
1.6,---
-
-,-
- - - - - - - - - - - - - -
! I I
1.4
1
- - - - - - -
;-
- - - -
-:
- - -
1.21
Pt1(t) I
Pt2(t)
0_8~---------'-------
I
o 50
100 150
200 250
300
350
400
Fig.
2.
Transients
of
mechanical
power
P
Ti
(t)
and angles
<5,
(t)
Synergetic Approach 137
:0::
1::
_~
~
'
~2(~
;
: I
001
r- - -
I-
- - -
0.005 - - _ I _ _
I
0 005-- - - I
-"
- - 1- - - -
0,
01
" -
_I
_ _
-0.015 -
250
300
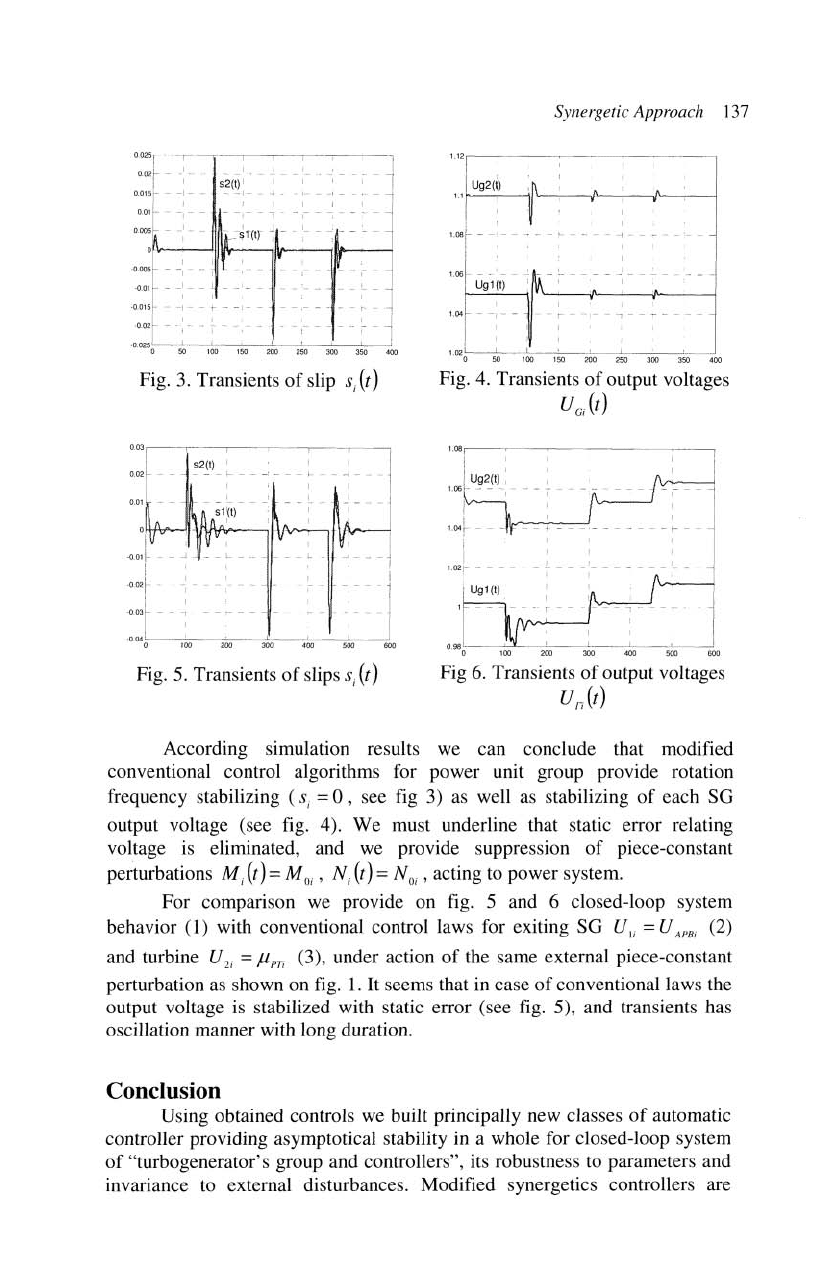
Fig.
3.
Transients
of
slip
s;
(t)
Fig. 4. Transients
of
output voltages
U G;
(t)
0,
03
1
-
,----,--
---
------.--
-------,
0,02 l- 52(t) I _: _ _ _
~
__
__
:
__
j
-O
,
04~
-~~
-
Fig.
5.
Transients
of
slips
s;
(t)
Fig
6.
Transients
of
output voltages
U
r;
(t)
According simulation results we can conclude that modified
conventional control algorithms for power unit group provide rotation
frequency stabilizing
(s
; =
0,
see fig 3) as well as stabilizing
of
each SG
output voltage (see fig. 4). We must underline that static error relating
voltage is eliminated, and we provide suppression
of
piece-constant
perturbations
M;
(t)
= M
0;'
N;
(t)
=
No;
, acting to power system.
For comparison
we
provide on fig. 5 and 6 closed-loop system
behavior (1) with conventional control laws for exiting SG U
,;
= U APB; (2)
and turbine U 2; = fipr; (3), under action
of
the same external piece-constant
perturbation
as
shown on fig.
1.
It
seems that in case
of
conventional laws the
output voltage is stabilized with static error (see fig. 5), and transients has
oscillation manner with long duration.
Conclusion
Using obtained controls
we
built principally new classes
of
automatic
controller providing asymptotical stability in a whole for closed-loop system
of
"turbogenerator's group and controllers", its robustness
to
parameters and
invariance to external disturbances. Modified synergetics controllers are