Сиротин С.С. Шахтные подъемные установки
Подождите немного. Документ загружается.


где F
двх
- усилие, развиваемое приводным двигателем,
для удовлетворения величины замедления a
3
, регламентируе-
мой требованиями ПБ, Н;
тормозное замедление ( F
6
=-F
т
<0)
где F
тх
- усилие, развиваемое тормозным приводом, для
удовлетворения величины замедления a
3
, регламентируемой
требованиями ПБ, Н;
режим свободного выбега ( F
6
=0)
При окончательном выборе величин ускорения a
1
и за-
медления a
3
следует.руководствоваться:
максимальные значение величины ускорения a
1
для гру-
зовых подъемов определяется проектом, а для людских, соглас-
но норм Правил технической эксплуатации, не должно пре-
вышать 1 м/с
2
;
продолжительность периода ускоренного движения (вре-
мя от момента подачи напряжения в обмотку статора привод-
ного двигателя до выхода последнего на естественную харак-
теристику) представляют как сумму отрезков времени, опре-
деляемых выдержкой соответствующих реле, осуществляющих
включение пусковых контакторов. В соответствии с вышеиз-
ложенным, для машин средней и большой мощности период
пуска составляет 7-15 с. Нецелесообразно искусственное уве-
личение продолжительности периода пуска, так как это связа-
но со значительными потерями в пусковом реостата и сниже-
нием технико экономических показателей работы подъемной
установки;
небольшое численное значение a
1
, полученное при ис-
пользовании выражения (294), свидетельствует о заниженной,
а значительное - о необоснованно завышенной мощности при-
водного двигателя. Практически a
1
в среднем составляет: при
скиповом подъеме - 1,0 -1,5 м/с
2
; при клетевом 0,6-1,0 м/с
2
;
расчетное значение замедления для всех типов подъемов,
в соответствии с требованиями Правил технической эксплуа-
тации, должно составлять не более 0,5 м/с
2
для подъемных
установок в выработках с углами наклона до 30 ° и не более
0,75м/с
2
- углами наклона более 30°;
при сокращении продолжительности периода замедле-
ния усложняется процесс управления подъемной машиной .
Нежелательно иметь по этой причине длительность периода
замедления менее 5<6 с. Предельная длительность этого пери-
ода составляет 13-18 с в зависимости от величин действитель-
ной максимальной скорости, замедления и длительности
подъемного цикла.
Величину ускорения a
1
, для наклонных подъемных ус-
тановок, оборудованных грузовыми с глухим кузовом или спе-
циальными людскими вагонетками, где как и для подъема с
обыкновенными клетями, применяют трехпериодную трапе-
цеидальную диаграмму скорости, определяют аналогично
уравнению (294)
где
- в соответствии с выражением (280), величина стати-
ческого усилия в начале подъемного цикла, Н.
Для различных режимов работы наклонного подъема
фактическую величину замедления определяют:
двигательное замедление (F
6
=F
дв
>0)
(
)
[
]
a
gkm m mH F
m
Г k k двх
i
3=
+ − −
∑
`
,
(296)
(
)
[
]
a
F gkm m mH
m
х k k
i
Г
3=
+ + −
∑
т `
,
(297)
(
)
[
]
a
gkm m mH
m
Г k k
i
3=
+ −
∑
`
.
(298)
( )
[ ]
( )
( )
F g
z
k
m m ml
zfm m mfl
m
l f
l f
zm
k
m zmf
ст
c k п n
c k п n
k
п n n
c c
Г
Г
Г
1
1 2
2
1 1 2 1
1 1 1
1
2
1
2
1 1 1=
+
+
+
+
+ + + +
+
+ ++
+ +
−
− −
−
−
− − −
sin
cos
sin cos ...
sin cos
sin cos
α
α
α α
α α
α α
a
F F
m
ст двх
i
3
6
=
−
∑
;
(300)
a
F F
m
пуск н ст
i
1
1
=
−
∑
λ
,
(299)
119
118
тормозное замедление (F
6
=F
дв
<0)
режим свободного выбега (F
6
=0)
где
в соответствии с выражением (280), величина статичес-
кого усилия в конце подъемного цикла, Н.
При скипах с донной разгрузкой и ручной схеме управ-
ления подъемной установкой применяют пятипериодную ди-
аграмму скорости ( см.рис.19).
С целью снижения динамических нагрузок в периоды
выхода порожнего скипа из разгрузочных кривых в начале и
входа груженого в теже кривые в конце подъемного цикла,
величину ускорения a
1
снижают до некоторого значения a
0
, а
замедления a
3
до a
4
. a
0
и a
4
, зависящие от величины скорости
соответственно V
0
и V
4
, а также длины разгрузочных кривых,
определяют из выражений (152) и (154). Практически a
0
и a
4
в среднем составляют 0,3-0,5 м/с
2
.
Величину нормального ускорения вне разгрузочных
кривых определяют аналогично уравнению (294)
где -
- величина движущего усилия в момент выхода порож-
него скипа из разгрузочных кривых пятипериодной диаграм-
мы скорости, Н.( точка 3, рис.29).
Для различных режимов работы скиповой подъемной
установки фактическую величину замедления определяют:
двигательное замедление (F
8
=F
двх
>0)
тормозное замедление (F
8
=-F
тх
<0)
режим свободного выбега
При автоматизированной схеме управления подъемом,
оборудованном скипами с данной разгрузкой, добавляется
шестой период - “период дотяжки скипа”, т.е после периода
нормального замедления наступает период равномерного дви-
жения с пониженой скоростью, порядка 0,5 м/с, а в конце подъе-
ма осуществляют стопорение подъемной машины. Величину
замедления при стопорении определяют из выражения (153).
Для криволинейных диаграмм скорости методика рас-
чета и выбора величин ускорений и замедлений остается той
же,что и для соответствующих им прямолинейных.
Для подъемных машин, оборудованных одно- и много-
желобчатыми ведущими шкивами трения, при расчете и вы-
боре величин ускорений и замедлений кроме удовлетворения
вышеизложенных норм производят обязательную проверку,
связанную с вероятностью возможного проскальзывания
подъемного каната.
Проверку по условию отсутствия явления проскальзы-
вания подъемных канатов вдоль канатоведущих шкивов, ко-
торое может иметь место как в период равномерного движе-
ния, так и в периоды пуска и замедления, осуществляют, ис-
a
F F
m
т ст
i
х
3
6
=
+
∑
;
(301)
( )
( )
( )
( )
F g
z
k
m m zfm m
zm
k
m ml
zmf mfl
m
l f
l f
ст
c c
c k п n
c k п n
k
п n n
Г Г
Г
6
1 1 1
1 2
2
1 1 2 1
1
2
1
2
1 1 1
=
+
+
+ + −
− −
−
+
−
− − −
−
+ −−
− +
− − −
sin cos
sin
cos
sin cos ...
sin cos
α α
α
α
α α
α α
(
)
(
)
[
]
F gkm m m H hГ k k p3 2= − − −`
(
)
(
)
[
]
a
gkm m m H h F
m
Г хk k p дв
i
3
2
=
− − − −
∑
`
(304)
(
)
(
)
[
]
a
F gkm m m H h
m
т k k p
i
х Г
3
2
=
+ − − −
∑
`
(305)
a
F
m
ст
i
3
6
=
∑
,
(302)
a
F F
m
пуск н ст
i
1
3
=
−
∑
λ
,
(303)
(
)
(
)
[
]
a
gkm m m H h
m
Г k k p
i
3
2
=
− − −
∑
`
.
(306)
121
120
пользуя выражения (87) и (88). При проектировании должны
удовлетворяться нормы:
σ
ст
≥1,75;σ
дин
≥1,25.
Для определения величин замедлений, удовлетворяющих
этим требованиям, необходимо дополнительно иметь следую-
щие исходные данные /12/:
коэффициент трения канатов о футировку µ, принимае-
мый для пластиката ПП-45 равным: 0,25 - для канатов с круг-
лыми и фасонными прядями и 0,2 - для канатов закрытой кон-
струкции; для футировок, выполненных из других материа-
лов - по данным завода изготовителя;
α − угол обхвата канатом канатоведущего шкива, рад.
Наиболее опасным с точки зрения проскальзывания каната,
является: при подъеме груза - период ускорения, а при спуске -
период замедления,
Коэффициент безопасности против скольжения σ
дин
за
время подъемного цикла должен иметь достаточную величи-
ну для всех периодов движения, и как минимум допускается
σ
дин
=1,25. При этом величина ускорения, согласно /13/, не дол-
жна превышать
допустимое замедление при торможении рабочим или у
аварийным тормозом,с соблюдением условия σ
дин
=1,25, опре-
деляют из выражения /13/
гда F
п.ст.
и F
о.ст.
- статические натяжения соответственно
в поднимаемой и опускаемой ветвях каната, Н;Σm
n
и Σm
0
- при-
веденные к радиусу органа навивки массы соответственно под-
нимаемой и опускаемой ветвей каната, кг.
Если величины a
1
и a
3
, полученные в соответствии c (307)
и (308), окажутся очень малыми, что несомненно способству-
ет увеличению продолжительности периодов пуска и замедле-
ния, снижению технико-экономических показателей работы
подъемной установки, следует рассмотреть варианты приме-
нения сосудов с большой собственной массой или перехода на
однососудный подъем с противовесом.
Для подъемных систем, оборудованных ведущими шки-
вами трения, используют диаграммы скорости как разные по
количеству периодов, так и по характеру изменения скорости.
При использовании асинхронного привода применяют посто-
янные по величине ускорения и замедления. Переменные уско-
рения, замедления с изменением их величины по закону нис-
ходящей прямой определяют параболическую форму измене-
ния скорости, что осуществимо при использовании привода
постоянного тока.
13. Уточненный выбор мощности приводного двигателя
подъемной установки.
Приводной двигатель шахтной подъемной установки
работает в повторно-кратковременном режиме, чередуя пери-
оды движения с периодами пауз. Кинематические и динами-
ческие параметры, характеризующие работу подъема, за срав-
нительно небольшой по длительности период подъемного цик-
ла, меняются в очень широком диапазоне (рис. 26-31 33, 34,
36). Поэтому возникают понятные трудности при необходи-
мости точного расчета и выбора мощности приводного дви-
гателя подъемной установки. Переменные по характеру изме-
нения момента или усилия, в зависимости от типа органа на-
вивки, нагрузочные диаграммы M=f(t) или F=f(t) иллюстри-
руют, как загружен приводной двигатель за время цикла. Для
асинхронных двигателей с фазным ротором и двигателей по-
стоянного тока с независимым возбуждением, у которых ток
приводного двигателя можно считать пропорционным разви-
ваемому им вращающему моменту или усилию, нагрузочные
диаграммы M=f(t) и F=f(t) можно представить как I=f(t).
Расчетную мощность приводного двигателя подъема
определяют из условия нагрева его обмоток до допустимой
температуры при длительной работе в повторно-кратковре-
менном режиме. С этой целью необходимо фактический по-
вторно-кратковременный режим работы двигателя с перемен-
ной нагрузкой привести к условному эквивалентному по на-
греву режиму с непрерывной постоянной нагрузкой.
В соответствии с законом Джоуля-Ленца нагрев обмо-
ток двигателя пропорционален квадрату силы тока и време-
ни, в течение которого он действует, т.е. количество тепла,
выделяемое за бесконечно малый промежуток времени от дей-
ствия фактической переменной нагрузки,
(
)
(
)
( )
( )
a
F e F F
m m me
оcт дин пст ост
дин n
1
1
10 0
≤
−− −
+ + −
∑ ∑ ∑
. . .. .
,
µα
µα
σ
σ
(307)
(
)
(
)
( )
( )
a
F e F F
m m me
пcтe дин пст ост
дин n
3
1
10 0
≤
−− −
+ + −
∑ ∑ ∑
. . .. .
,
µα
µα
σ
σ
(308)
123
122
где k - коэффициент пропорциональности.
Таким образом, количество тепла, выделяемое в обмот-
ках приводного двигателя за время одной подъемной операции,
Учитывая, что решение интеграла такого вида равно
среднеквадратичному значению подинтегральной функции,
получим
где T
экв
- эквивалентное, о поправкой на ухудшение ус-
ловий охлаждения обмоток приводного двигателя в периоды
разгона, замедления и паузы, время подъемного цикла, с.
Решая совместно (309) и (310) и учитывая, что количе-
ство тепла, выделяемого в обмотках приводного двигателя от
действия фактической переменной нагрузки, равно количеству
тепла, обусловленному действием эквивалентной постоянной,
т.е. эквивалентный ток
Так как ток приводного двигателя прямопропорциона-
лен развиваемому им движущему моменту, то для подъемных
систем с переменным радиусоморгана навивки
а для систем о постоянным радиусом органа навивки,
учитывая, что M=FR, величину эквивалентного усилия опре-
деляют из выражения
Для окончательного опраделения F
экв
необходимо ре-
шить интеграл
Так как F=f(t) в течение подъемного цикла является фун-
кцией разрывной и изменяющейся по различным закономер-
ностям, то интеграл
решают индивидуально для каждого периода подъем-
ного цикла.
При трехпериодной трапецеидальной диаграмме скоро-
сти и уравновешенной системе подъема (рис.26), где m
k
=m
k
`
Знаменатель подкоренного выражения формулы (314)
где β
1
и β
2
- коэффициенты, учитывающие ухудшение
условий охлаждения обмоток приводного двигателя во время
соответственно ускоренного и замедленного движения, а так-
же паузы. По данным акад.М.М Федорова β
1
=1; β
2
=0,33;
ХЭМЗ рекомендует β
1
=0,5; β
2
=0,25.
При отрицательной величине движущего усилия в период
замедления, когда приводной двигатель отключают от сети, а тор-
можение осуществляют механическим тормозом, слагаемое F
3
2
t
3
в
формуле (314) не учитывается. При использовании в этот период, с
целью корректировки скорости движения подъемных сосудов в кон-
це подъемного цикла, устройств динамического торможения
слагаемое F
3
2
t
3
в выражении (314) следует учитывать в обязатель-
ном порядке, так как обмотки приводного двигателя нагреваются
постоянным током, поступающим от регулируемого источника.
В случае, если величина движущего усилия на радиусе
органа навивки подъемной машины за время каждого перио-
да подъемного цикла изменяется по линейной закономернос-
ти от F
1
до F
2
и т.д., как это имеет место, например, при трех-
периодной трапецеидальной диаграмме скорости, подинтег-
ральную функцию F
2
dt из выражения (313), для подъемных
систем без уравновешивающего или с тяжелым подвесным ка-
натом (рис.26), где m
k
`= 0 или m
k
`=m
k
) представляют в виде
dq k dt= I
2
,
q k dt k Tэкв
Tц
экв экв= =
∫
I I
2
0
2
,
(310)
I
I
экв
Tц
экв
dt
T
=
∫
2
0
.
(311)
M
Mdt
T
экв
Tц
экв
=
∫
2
0
,
(312)
F
Fdt
T
экв
Tц
экв
=
∫
2
0
.
(313)
Fdt
Tц
2
0
∫
.
Fdt
Tц
2
0
∫
F
Ft Ft Ft
T
экв
экв
=
+ +
1
2
1
3
2
1
5
2
3
.
(314)
(
)
T t t tэкв = + + +β β1 1 3 2 2Θ,
Fdt F
F F
t
t dt
F
F F
t
tdt F
F F
t
t dt
T t
t
Tt
tt
T
2
0 0
2
2
1
1 2
1
1
3
3 4
2
1
3
5
5 6
3
12
∫ ∫
∫ ∫
= −
−
+
+ −
−
+ −
−
−
+
,
(315)
qk dt
Tц
=
∫
I
2
0
.
(309)
125
124
где закономерность изменения ве-
личины движущего усилия в отдельные периоды подъемного
цикла, Н.
Величину эквивалентного движущего усилия на радиу-
се органа навивки получают в результате совместного реше-
ния уравнений (313) и ( (315)
При небольшой разнице между, например, F
1
и F
2
, а так-
же небольшой продолжительности периода, подинтегральную
функцию Fdt из выражения (313) можно упростить
С учетом вышеизложенного, величину эквивалентного
движущего усилия определяют:
при трехпериодной трапецеидальной диаграмме скоро-
сти (рис.34)
при шестипериодной (рис.26)
В соответствии с нагрузочной диаграммой, представлен-
ной на рис.26 , в периоды основного замедления и стопорения
подъемной машины, величины движущих усилий соответствен-
но F
7
, F
8
и F
11
, F
12
- отрицательны по абсолютной величине.
Однако слагаемое учитывается в выражении
(319) при определении величины эквивалентного движущего
усилия, так как в период основного замедления предполагается
использовать динамическое торможение. В период стопорения
подъемной машины рабочим тормозом, приводной двигатель
отключают от сети переменного тока, поэтому усилия F
11
и F
12
не способствуют нагреву обмотки приводного двигателя и их
не учитывают в подкоренной функции выражение (319).
Для подъемных систем с переменным радиусом органа
навивки при графике моментов в координатах M=f(t) величи-
ну эквивалентного момента определяют аналогично вышепри-
веденным формулам (314) - (319).
Определив величину эквивалентного усилия (момента)
удовлетворяющего условиям допустимого нагрева обмоток
приводного двигателя, определяют его эквивалентную мощ-
ность: для подъемных систем с постоянным радиусом органа
навивки
где V
max
- максимальная линейная действительная ско-
рость движения подъемных сосудов, м/с; η
ред
- к.п.д. редукто-
ра подъемной машины;
с переменным
где ω
max
- максимальная угловая скорость вращения ба-
рабана, с
-1
.
С учетом возможного падения напряжения в общешах-
тной сети, рекомендуют иметь установленную мощность при-
водного двигателя подъема на 10 % больше эквивалентной,
т.е. P
уст
.≥1,1P
экв
Ориентировочно выбранный приводной двигатель про-
веряют по:
фактической перегрузочной способности
где F
max
- величина максимального движущего усилия
по нагрузочной диаграмме, Н;
- приведенное к
радиусу органа навивки номинальное усилие, Н.
F
F F
t
tF mt1
1 2
1
1−
−
= − −
( )
Fdt F F
t
t
0
1
2
2
2
1
1
2
∫
= + .
(317)
( ) ( ) ( )
( ) ( )
F
F F
t
F FF F
t
F FFF
t
ttttt
FFF F
t
F FF F
t
t
экв=
+ + + + + +
+++++
+
+ + + + + +
++
1
2
2
2
0
3
2
3 4
4
2
1
5
2
5 6
6
2
2
10 1 3 4 4
7
2
7 8
8
2
3
9
2
9 10
10
2
4
2 2
2 2 2
2 2
β
β Θ
.
(319)
( )
F FF F
t
7
2
7 8
8
2
3
2
+ +
P
FV
экв
экв
ед
=
⋅
⋅
max
р
,
1000η
(320)
P
М
экв
экв
ед
=
⋅
⋅
ω
η
max
р
,
1000
(321)
K
F
F
факт
н
=
max
, (322)
F
P
V
н
н ед
=
1000
η
р
max
,
( ) ( ) ( )
F
F FF F
t
F FF F
t
F FF F
t
tt t
экв=
+ + + + + + + +
+++
1
2
1 2
2
2
1
3
2
3 4
4
2
2
5
2
5 6
6
2
3
11 3 2 2
3 3 3
β βΘ
.
(316)
( ) ( ) ( )
F
F F
t
F FF F
t
F F
t
t t t
экв=
+ + + + + +
+ ++
1
2
2
2
1
3
2
3 4
4
2
2
5
2
6
2
3
11 3 2 2
2 2 2
β βΘ
;
(318)
127
126

При асинхронном приводе фактический коэффициент
перегрузки ≤ 1,6...1,8; при приводе постоянного тока ≤ 1,8...2.
Кроме перегрузок при нормальной работе подъема сле-
дует учитывать перегрузки от действия экстренных усилий
(моментов):
при поднимании верхней груженой ветви, когда сосуд
порожней четко зафиксирован на нижней приемной площадке,
при удлинении каната, когда нижний порожний сосуд
поднимается, а верхний зафиксирован на верхней приемной
площадке
Коэффициент перегрузки от экстренных усилий (моментов)
При асинхронном приводе K
экс
≤ 1,8...2, для системы
подъема с приводом постоянного тока K
экс
≤ 2,0...2,2. Если усло-
вия проверки по перегрузкам выполняются полностью, то ори-
ентировочно выбранный двигатель принимают к установке.
В противном случае необходимо изменить кинематичес-
кие или динамические параметры проектируемой подъемной
установки (уменьшить ускорение или замедление, снизить при-
веденную массу и т.д.), изменить систему подъема, например,
за счет ее статического уравновешивания.
14. Технико-экономические показатели работы шахтной
подъемной установки
Полезную затрачиваемую исключительно на подъем
расчетного груза мощность для любой произвольной точки
диаграммы скорости (рис.37) определяют из выражения (272).
Площадь фигуры, ограниченной ломанной линией N
n1
-
N
n12
(рис.37) в масштабе представляет собой расход электро-
энергии, затраченной на подъем расчетного груза за время
одного подъемного цикла.
Полезную мощность для произвольной точки диаграм-
мы скорости на валу приводного двигателя, очевидно, опре-
деляют по формуле
η
ред.
- к.п.д редуктора.
График мощности, представленный на рис.37 площадью
фигуры 1-12 являет собой полезный расход электроэнергии
на валу приводного двигателя, а площадки Nn
1
-2-Nn
2
,Nn
3
-3-4-
Nn
4
,Nn
п5
-5-6-Nn
п6
, Nn
7
-7-8-Nn
8
, Nn
9
-9-10-Nn
10
и Nn
11
-11-12-Nn
12
-
потери электроэнергии в редукторе.
Если пренебречь потерями в цепи статора, то мощность,
потребляемая из сети полностью передается ротору, т.е.
где M- движущий момент, приведенный к валу привод-
ного двигателя, Н.м; ω
0
- частота вращения магнитного поля
статора, с
-1
.
Величину движущего момента на валу приводного дви-
гателя можно представить в виде
где F
бар
- движущее усилие на валу органа навивки, Н;
R - радиус органа навивки, м; i - передаточное число
редуктора.
Пренебрегая величиной скольжения, синхронную час-
тоту вращения можно представить в виде
где - максимальная угловая скорость ротора при-
водного двигателя, с
-1
; V
max
- действительная максимальная ско-
рость, м/с
2
.
Решая совместо (329), (330) и (331), получим
F g
k
m m mHэкс c kГ. ,=
−
+ +
1
2
(325)
M g
k
m mHRэкс c k бц. ..=
−
+ +
1
2
(326)
M
M
i
F R
i
ба
ед
ба
ед
= =
р
р .
р.
р .
,
η η
(330)
N
FV
cx
x
ед сети дв
=
max
р
,
1000η η η
(332)
K
F
F
M
M
экс
экс
экв
экс
экв
.
.max
.
.max
.
.= =
(327)
N P Mc от
=
=
р . ,
ω
0
(329)
( )
F g
k
m m m mHэкс c k kГ. ` ,=
+
+ + −
1
2
(323)
M g
k
m m R mHRэкс c бц k мцГ. .. .. ;=
+
+
−
1
2
(324)
N
N
двх
пх
ед
=
ηр
,
(328)
ω ω0≈ ⋅=
max
..
max
,
он
i
V i
R
(331)
129
128
где N
cx
- мощность на валу органа навивки, потребляе-
мая из сети для любой произвольной точки диаграммы скоро-
сти, кВт;
η
сети
и η
дв
- коэффициент полезного действия соответ-
ственно сети и приводного двигателя.
Анализ ( 332) подтверждает, что асинхронный двига-
тель потребляет мощность из сети независимо от изменения
величины угловой скорости, пропорционально движущему
усилию и максимальной линейной скорости.
В масштабе площадь фигуры, представленной на гра-
фике N=f(t)(рис.37) ломанной линией N
c1
-N
c12
полный расход
электроэнергии на подъем расчетного груза за время одного
подъемного цикла.
Таким образом, в периоды разгона и замедления (в дви-
гательном режиме) электроэнергия, потребляемая из сети, рас-
ходуется на подъем полезного груза, потери в редукторе, об-
мотке приводного двигателя, сети и пусковом реостате. В пери-
од установившегося движения отсутствуют потери в реостате.
Очевидно, расход электроэнергии на шинах подстанции
на одну тонну поднимаемого груза определяют из выражения
где K
M.T.
= 1,05-1,1 - коэффициент, учитывающий рас-
ход электроэнергии при маневрах, торможении, для питания
приводных двигателей компрессора, насоса маслосмазки и т.д.;
m
Г
- масса полезного груза, т.
Идеальная мощность приводного двигателя для подъе-
ма массы груза в одну тонну на высоту Н определяется из вы-
ражения
Идеальный расход электроэнергии на подъем массы гру-
за в одну тонну
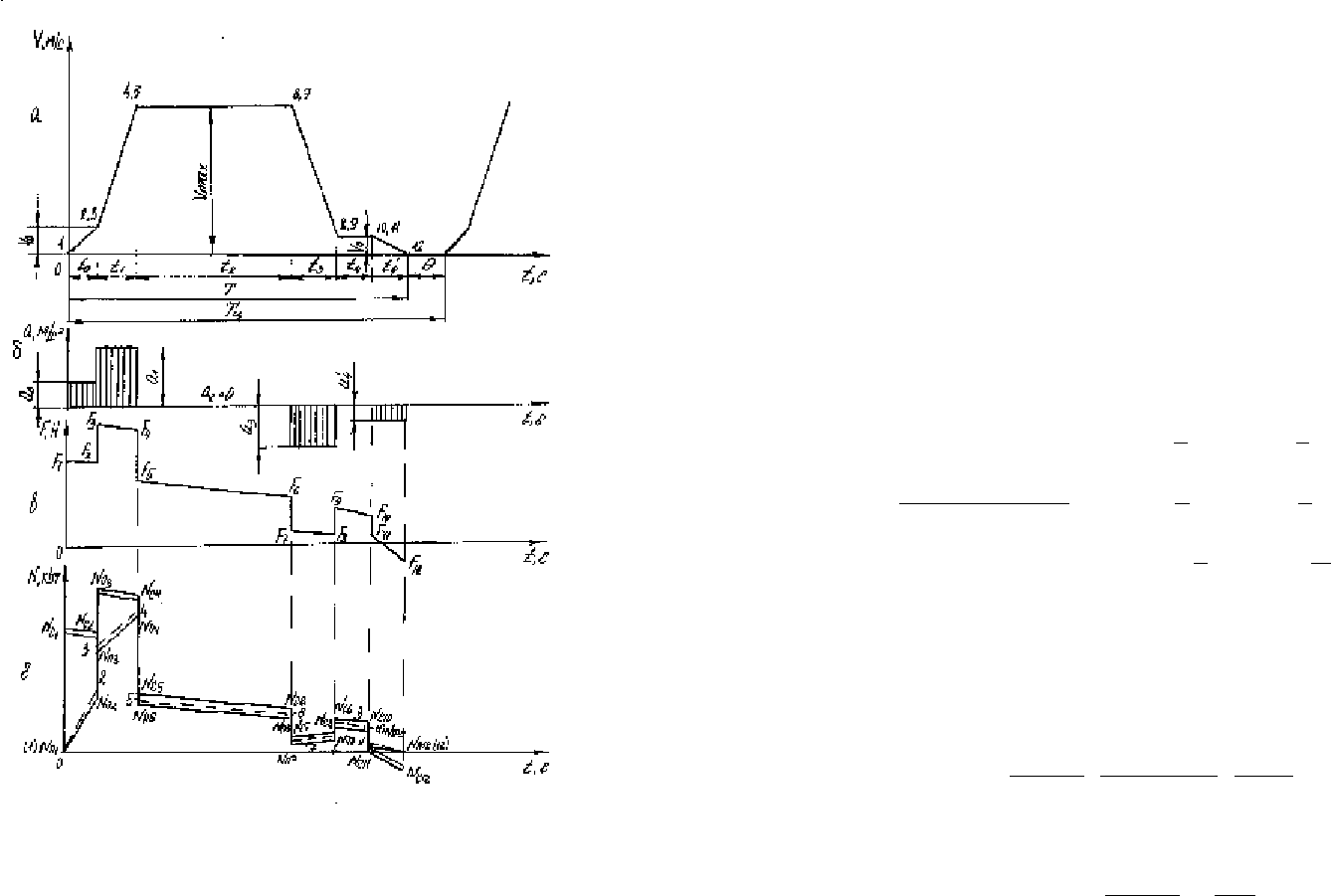
Шестипериодные диаграммы: скорости - а, ускорения - б, усилия - в
и мощности - г скиопвой подъемной установки.
Рис. 37
( ) ( )
( ) ( )
( ) ( )
W
K
m
N N
t
N N
t
N N
t
N N
t
N N
t
N N
t
T
M Т
Гед дв сети
c c c c
c c c c
c c c c
1
1 2
0
3 4
1
5 6
2
7 8
3
9 10
4
11 12
4
36
2 2
2 2
2 2
=
+ + + +
+ + + +
+ + +
..
.
`
,
рη ηη
(333)
W NT
H
T
T
H
И ИT1
98
3600 367
= =
⋅
=
,
.
(335)
N
mgH
T
H
T
H
T
И T1
1000
100098
1000
98
= =
⋅
⋅
=
, .
.
(334)
131
130
Коэффициент полезного действия подъемной установ-
ки определяют
Для подъемных систем с переменным радиусом органа
навивки в выражении (332) вместо движущего усилия F
x
ис-
пользуют движущий момент M
x
, а вместо линейной максималь-
ной скорости V
max
- угловую ω
max
.
15. Расчет характеристик и выбор сопротивлений
пускового реостата
В практике эксплуатации шахтных подъемных устано-
вок преимущественное распространение получил асинхронный
привод, где регулирование скорости в периоды переходных
процессов и управление подъемной системой осуществляют с
помощью металлического реостата и контакторно-релейной
аппаратуры стандартных магнитных станций. Учитывая, что
расчет и выбор сопротивлений пускового реостата в значи-
тельной степени зависит от формы диаграммы скорости про-
ектируемой подъемной установки,останавливаемся подробно
на известном графо-аналитическом методе /14/ для условий
автоматизированной скиповой подъемной установки, обору-
дованной скипами с донной разгрузкой, где применяют шес-
типериодную диаграмму скорости. Кроме диаграммы скорос-
ти необходимо иметь диаграмму движущих усилий и техни-
ческие данные приводного двигателя подъема (P
н
, кВт - мощ-
ность; n
0
и n
н
- частоты вращения соответственно магнитного
поля статора и ротора приводного двигателя, об/мин; U
н2
-
номинальное напряжение обмотки ротора. В; I
н2
- номиналь-
ный ток обмотки ротора, А; λ
н
- номинальная перегрузочная
способность приводного двигателя) (рис.38).
Номинальный момент приводного двигателя определя-
ют из выражения / II /
Номинальным называют такое сопротивление, которое,
будучи введено в цепь ротора приводного двигателя, дает пос-
леднему возможность создавать при скольжении S = 1 номи-
нальный момент.
Величину номинального сопротивления определяют из
M
P
n
н
н
н
= ⋅95510
3
, .
(337)
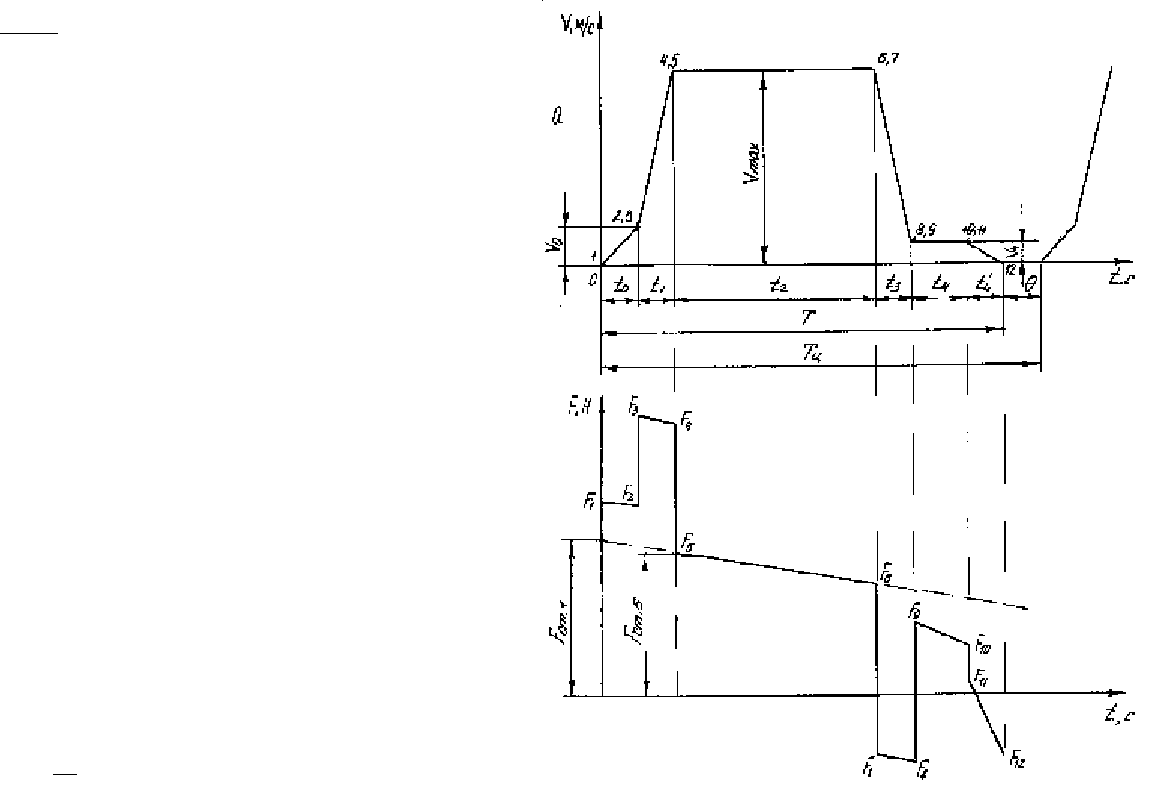
Диаграммы скиповой подъемной кстановки:
а - линейной скорости, м/с; б - движущих усилий, Н
Рис. 38
ηпуст
И T
ф T
W
W
. . .=
1
1
(336)
133
132

выражения
Номинальное усилие, развиваемое приводным двигате-
лем на радиусе органа навивки,
где Д
б
- диаметр органа навивки, м.
В рассматриваемом графо-аналитическом методе рас-
чета сопротивлений пускового реостата делают допущение о
том, что и естественная и искусственные механические харак-
теристики являются линейными в своей рабочей устойчивой
части. Этот прием во многом упрощает вычисления, а погреш-
ность, обусловленная им, не превышает норм, регламентируе-
мых требованиями инженерного расчета (рис. 39 )
Диаграмму, представленную на рис. 39 , строят в следу-
ющей последовательности.
На оси абсцисс откладывают в масштабе отрезок OF
н
,
соответствующий номинальному усилию F
н
, восстановив из
точки F
н
перпендикуляр. На восстановленном перпендикуля-
ре в масштабе откладывают отрезок, соответствующий номи-
нальной скорости n
н
, а на оси ординат - синхронной п
с
. Через
две точки п
с
и п
н
проводят прямую линию, которая представ-
ляет собой, с известным допущением,естественную механичес-
кую характеристику асинхронного двигателя.
Имея диаграмму скорости и движущих усилий, а также
зная масштаб усилий и скорости, наносят диаграмму движу-
щих усилий в координатах п=f(F). Усилие F
1
при скорости
n=0 и скольжении S=1 наносят на ось абсцисс (точка F
1
). Уси-
лие F
2
при скорости п
0
определяется точкой F
2
. Усилие F
3
при
скорости п
0
определяется точкой F
3
и т.д.
Соединив между собой точки F
1
,F
2
...F
12
, получают свое-
образную диаграмму изменения скорости за один цикл подъе-
ма, в функции движущих усилий.
Для построения искусственных механических характери-
стик асинхронного привода на график n=f(F) наносят линии
нижнего F
н.п.
и верхнего F
в.п.
переключения (рис.39). Статичес-
кие усилия F
ст1
и F
ст5
, соответствующие началу подъемного цик-
ла (скорость движения подъемных сосудов равна нулю) и мо-
менту перехода приводного двигателя на естественную харак-
теристику (скорость движения подъемных сосудов максималь-
R
U
н
н
н
=
2
23I
.
(338)
F
Mi
Д
н
н
б
ед=
2
ηр ,
(339)
Диаграмма механических характеристик электропривода
Рис. 39
135
134
ная), взятые из диаграммы F=f(t)в соответствующем масшта-
бе наносят на график n=f(t): F
ст1
при скорости n=0 и F
ст5
при
скорости n
max
. Соединив точки F
ст1
и F
cт5
пунктиром, получают
на графике n=f(F) линию статических усилий, т.е. закономер-
ность изменения величины статического усилия от момента
пуска до периода установившегося движения. Линия нижнего
переключения наносится на график n=f(F) параллельно линии
статических усилий с таким расчетом, что F
н.п
= (1,1 - 1,2)F
ст.
Вер-
хний предел переключений принимают обычно равным F
в.п.
=
(0,85 - 0,9)λ
н
F
н
. Для средних и крупных подъемных машин реко-
мендуют / 12 / принимать магнитные станции, содержащие 6-8
пусковых ступеней. Если приняты 7-8 ступеней реостата, то не-
обходимо две из них сделать предварительными, которые не-
обходимы для того, чтобы при их включении в цепь ротора
подъемного двигателя усилие, развиваемое им, было меньше
статического. При работе с номинальной нагрузкой при вклю-
чении предварительных ступеней “выбирают” слабину подъем-
ного каната, зазор в зацеплении шестерен редуктора. В режи-
мах работы без нагрузки (проверка ствола, подъемного каната
и т.д.), когда скорость движения подъемных сосудов должа быть
гораздо меньше ее максимального значения, также используют
предварительные ступени. Характеристика приводного двига-
теля, соответствующая полному включению сопротивления в
цепь ротора R
0
должна быть нанесена на диаграмму n=f(F) та-
ким образом, чтобы двигатель при скорости n=0 и скольжении
S=1 развивал усилие 0,3F
н
. Величину полного сопротивления
R
0
определяют из выражения
После выключения первой ступени двигатель должен
развивать усилие на радиусе органа навивки = 0,7F
н
. Меха-
ническая характеристика приводного двигателя должна соеди-
нять точки n
c
и 0,7F
н
. Величину сопротивления для этой сту-
пени R
1
, определяют следующим образом
Для построения механической характеристики соответ-
ствующей первой пусковой ступени R
2
, необходимо, в соот-
ветствующем масштабе на оси абсцисс отложить отрезок λ
пуск
F
н
где λ
пуск
- коэффициент перегрузки приводного двигателя в пе-
риод пуска, величину которого устанавливают при выборе ве-
личины ускорения а
1
.
Соединив на рис.39 конец отрезка λ
пуск
F
н
с точкой n
c
строят механическую характеристику первой пусковой ступе-
ни R
2
, величину сопротивления которой определяют из выра-
жения
В момент включения первой пусковой ступени, как вид-
но из рис.39, усилие,развиваемое приводным двигателем F
пуск
=
=λ
пуск
F
н
>F
ст1
, что обуславливает начало периода движения по-
рожнего скипа в разгрузочных кривых. При автоматизиро-
ванном управлении - схемой автоматики, при ручном - маши-
нистом подъемной установки в точке Д диаграммы (рис.39),
соответствующей началу периода ускоренного движения ски-
пов вне разгрузочных кривых, отключается первая пусковая
ступень и осуществляется переход на очередную. Следующие
характеристики асинхронного двигателя наносятся в преде-
лах верхней и нижней линий переключений.
Величину сопротивления ступеней определяют из выражения
где Sn - скольжение в момент выключения n-ой секции, %.
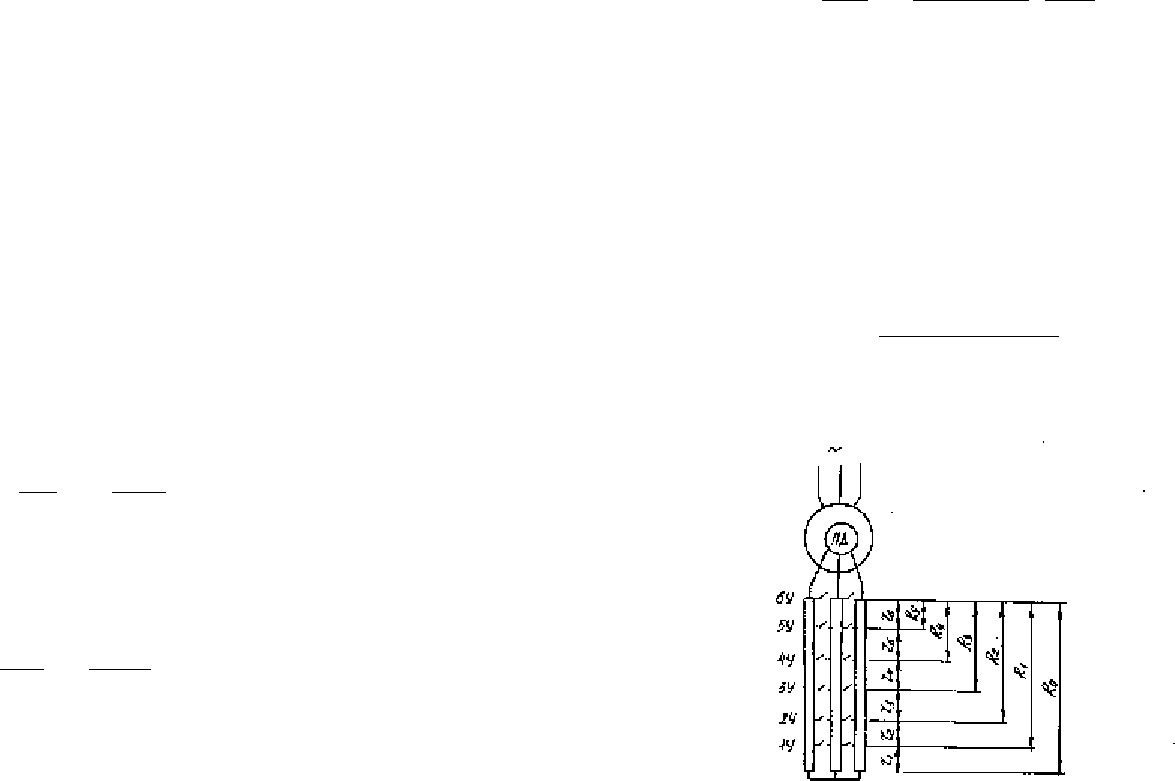
Сопротивления отдельных секций реостата определяют
из выражений (см.рис.40) r
1
=R
0
-R
1
; r
2
=R
1
-R
2
; ... r
n
=R
n-1
-R
n
.
R R
S
F
R Rн н н0
100%
30%
33= = =
%
%
, .
(340)
R R
S
F
R
R
н
пуск
н
пуск
2 4
100%
100%
= =
⋅
=
%
%
.
λ λ
(342)
R R
S
F
п н
п
н н
=
−
%
(, ,) %
,
08509 λ
(343)
Схема пускового реостата
Рис. 40
R R
S
F
R Rн н н1
100%
70%
143= = =
%
%
, .
(341)
137
136