Сиротин С.С. Шахтные подъемные установки
Подождите немного. Документ загружается.


в период равномерного движения
в начале и конце периода равномерно замедленного дви-
жения
При использовании подъемных систем с тяжелым под-
весным канатом, где m
k
<m
k
` величину движущих усилий в ха-
рактерных точках диаграммы скорости определяют из выра-
жения
В начале подъемного цикла
в конце периода ускоренного движения
в начале периода равномерного движения
в конце периода равномерного движения
в начале периода замедленног о движения
в конце подъемного цикла
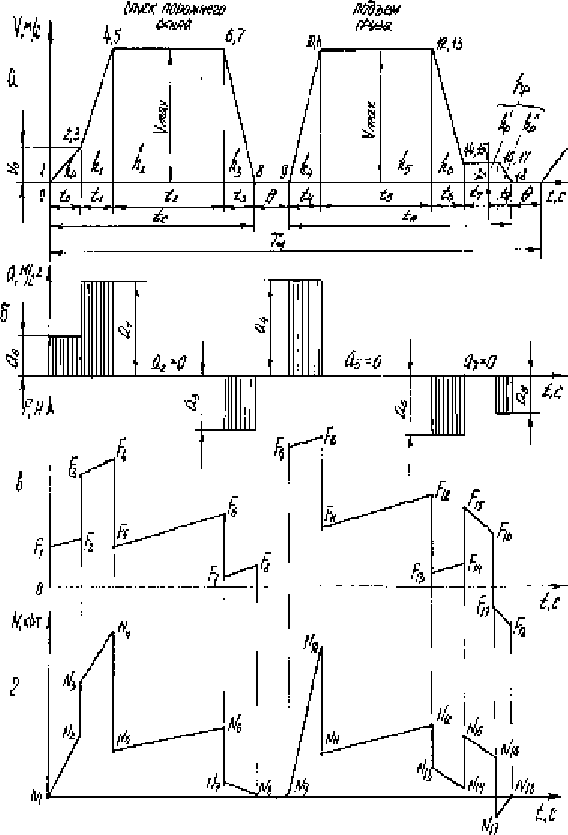
Как видно из диаграмм, представленных на рис.26, уси-
лия, развиваемые приводным двигателем в различные проме-
жутки времени движения подъемных сосудов и при разной сте-
пени статической уравновешенности подъемной системы, из-
меняются по разным закономерностям.
У статически неуравновешенных подъемных систем (m
k
`=0)
максимальное движущее усилие имеет место в период измене-
ния скорости от нуля до максимального значения, затем в пе-
риоды времени t
2
и t
3
это усилие уменьшается, оставаясь поло-
жительным по величине, или даже становясь при известных
условиях отрицательным в конце подъемного цикла.
Положительные усилия в конце подъемного цикла ука-
зывают на необходимость двигательной дотяжки, отрицатель-
ные - использование тормоза в конце подъемного цикла.
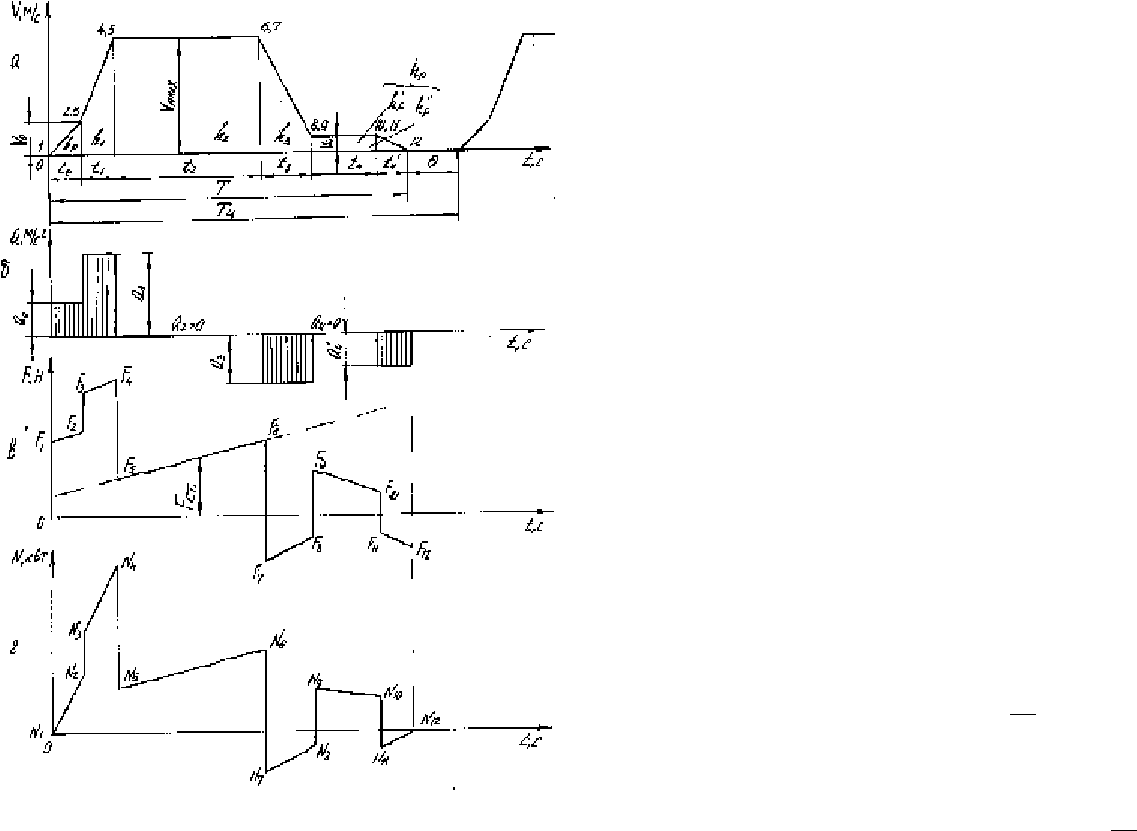
У cтатически уравновешенных подъемных систем
(m
k
=m
k
`) величина статического усилия, как видно из диаг-
рамм, представленных на рис.26, не зависит от положения со-
суда в стволе, а изменение величины движущего усилия опре-
деляется знаком и величиной динамической составляющей.
Здесь величина движущего усилия, при отсутствии внешнего
воздействия, в течение всего периода замедления может быть
равна нулю. Такой режим работы подъемной установки, ког-
да замедление осуществляют под действием сил инерции, на-
зывается свободным выбегом. В связи с невозможностью аб-
солютно точной дозировки загрузки, в режиме свободного
выбега подъемный сосуд остановится выше или ниже подъем-
ной площадки, что потребует использование внешнего воз-
действия, т.е. повлечет за собой увеличение продолжительно-
сти подъемного цикла, поэтому работу в режиме свободного
выбега применяют довольно редко.
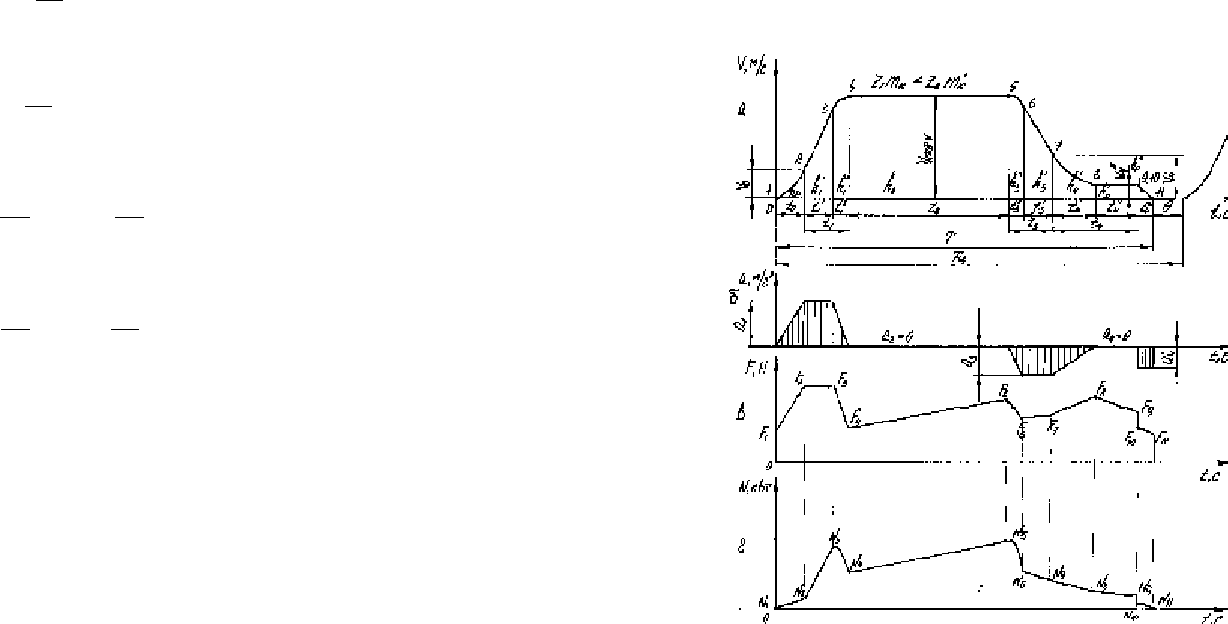
У подъемных систем с тяжелым подвесным канатом
(m
k
<m
k
`), как и у систем статически неуравновешенных, вели-
чина движущего усилия зависит от положения сосуда в ство-
ле. При этом, в отличие от статически неуравновешенных си-
стем, здесь F
ст.
от начала к концу подъемного цикла имеет тен-
денцию к увеличению, что необходимо для обеспечения усло-
вий безопасной работы шахтных подъемных установок, обо-
рудованных шкивами трения.
Полезная мощность, затрачиваемая исключительно на
подъем расчетного груза в любой произвольной точке диаг-
раммы скорости определяют из выражения
где F
x
и V
x
- текущие значения величины движущего уси-
лия и линейной скорости на радиусе органа навивки, взятые
за один и тот же момент времени подъемного цикла, Н и м/с.
Используя выражение 272 определяют мощность в ха-
рактерных точках диаграмм скорости и затем строят диаграм-
мы полезной мощности на валу подъемной машины, которые
представлены на рис.26.
На рис. 27, 28 и ,29 представлены диаграммы рабочих
режимов автоматизированной подъемной установки, обору-
дованной скипами с донной разгрузкой, когда: m
k
` =0, m
k
`=
=m
k
и m
k
<m
k
`. Подъемная система статически неуравновешен-
ная, т.е. m
k
`=0. В соответствии с (268) для такой системы ос-
F F gkmГ3 4
=
=
;
F F gkm maГ i5 6 3= = −
∑
.
(
)
[
]
F gkm m mH maГ k k i1 1= − − +
∑
` ;
(
)
(
)
[
]
F gkm m m H h maГ k k i2 1 12= − − − +
∑
` ;
(
)
(
)
[
]
F gkm m m H hГ k k3 12= − − −` ;
(
)
(
)
[
]
{
}
F gkm m m H h hГ k k4 1 22= − − − +` ;
(
)
(
)
[
]
{
}
F gkm m m H h h maГ k k i5 1 2 32= − − − + −
∑
` ;
(
)
[
]
F gkm m mH maГ k k i6 3= + − −
∑
` ;
N
FV
ПХ
X X
=
1000
,
(272)
(
)
(
)
[
]
F gkm m m H X maГ k k i= − − − ±
∑
` .2
(271)
79
78
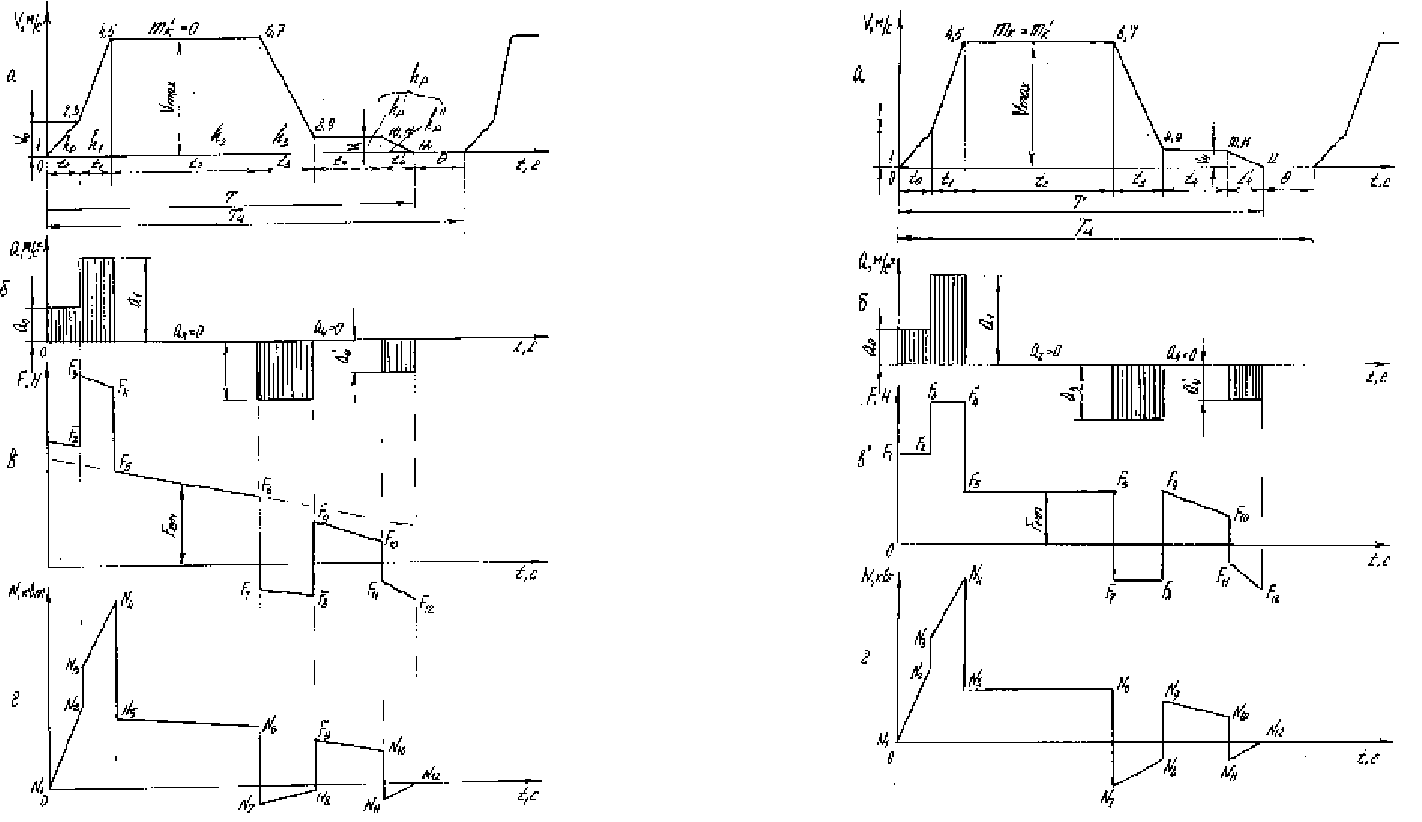
Диаграммы статически неуравновешенной
скиповой подъемной установки:
а-скорости; б-ускорения; в-джвижущих усилий; г-мощности на валу
подъемной машины, затрачиваемой на подъем полезного груза
Рис. 27
Диаграммы статически уравновешенной скиповой
подъемной установки:
а-скорости; б-ускорения; в-движущихся усилий; г-мощности на валу
подъемной машины, затрачиваемой на подъем полезного груза.
Рис. 28
81
80
новное уравнение динамики имеет вид
Движущие усилия в характерных точках диаграммы скорости:
в начале подъемного цикла
в конце периода ускоренного движения в разгрузочных
кривых
в начале и конце периода ускоренного движения после
выхода порожнего скипа из разгрузочных кривых
в начале и конце периода равномерного движения
в начале и конце периода замедленного движения
в начале и конце периода движения груженого скипа в
разгрузочных кривых о постоянной скоростью
в начале и конце периода стопорения подъемной машины
Диаграммы скиповой подъемной установки оборудованной
уравновешивающим канатом:
а-скорости; б-ускорения; в-движущего усилия; г-мощности на валу
подъемной машины, затрачиваемой на подъем полезного груза.
Рис. 29
(
)
(
)
[
]
F gk m mH X mac k iГ= − + − ±
∑
β 2 .
(273)
[
]
F gkm mH maГ k i1 0= + +
∑
,
(
)
[
]
F gkm mH h maГ k i2 02= + − +
∑
р ;
(
)
[
]
F gkm mH h maГ k i3 12= + − +
∑
р ,
(
)
[
]
{
}
F gkm mH h h maГ k i4 12 1= + − + +
∑
р ;
(
)
[
]
{
}
F gkm mH h hГ k p5 12= + − + ,
(
)
[
]
{
}
F gkm mH h h hГ k p6 1 22= + − + + ;
(
)
[
]
{
}
F gkm mH h h h maГ k p i7 1 2 32= + − + + −
∑
;
(
)
[
]
{
}
F gkm mH h h h h maГ k p i8 1 2 3 32= + − + + + −
∑
;
(
)
[
]
{
}
F gkm mH h h h hГ k p9 1 2 32= + − + + + ;
( )
[ ]
F g k
h
h
m mH h h h h hc
p
p
k pГ p10 1 2 32= −
+ − + + + +
β
`
` ;
( )
[ ]
F g
k
h
h
m
mH h h h h h
ma
c
p
p
k p p
i
Г
11
1 2 3
4
2
=
−
+
+ − + + + +
−
∑
β
`
`
`,
(
)
[
]
F gk m mH mac k iГ12 4= − − −
∑
β `.
83
82

Для статически уравновешенной подъемной системы,
когда m
k
=m
k
` основное уравнение движения приобретает вид
В характерных точках шастипериодной диаграммы ско-
рости величины движущих усилий, для рассматриваемого слу-
чая, определяют из выражений:
в начале и конце периода ускоренного движения порож-
него скипа в разгрузочных кривых
в начале и конце периода ускоренного движения после
выхода порожнего скипа из разг рузочных кривых
в начале и конце периода равномерного движения
в начале и конце периода замедленного движения до
момента входа груженого скипа в разгрузочные кривые
в начале и конце периода равномерног о движения гру-
женого скипа в разгрузочных кривых
в начале и конце периода стопорения подъемной машины
Основное уравнение динамики для подъемных систем с
тяжелым подвесным канатом m
k
<m
k
` имеет вид
Величины движущих усилий в характерных точках ди-
аграммы скорости здесь определяют следующим образом:
в начале и конце периода ускоренного движения порож-
него скипа в разгрузочных кривых
в начале и конце периода ускоренного движения после
выхода порожнего скипа из разгрузочных кривых
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью
в начале и конце периода замедленного движения при
изменении линейной скорости от V
max
до V
4
в начале и конце периода равномерного движения гру-
женого скипа в разгрузочных кривых со скоростью дотяжки V
4
в начале и конце периода стопорения подъемной машин
ы при изменении линейной скорости дотяжки от V
4
до нуля
Величины полезной мощности, затрачиваемой исклю-
чительно на подъем расчетного груза, в характерных точках
диаграмм скорости для всех трех рассматриваемых случаев вы-
числяют, используя выражение (272)
В подъемных системах с опрокидными сосудами в нача-
ле подъемной операции нарушается уравновешивание соб-
ственных масс сосудов, так как кузов опускающегося сосуда
в этот момент опирается на разгрузонные кривые и лишь час-
тично нагружают канат.
F F gkm maГ i1 2 0= = +
∑
;
F F gkm maГ i3 4 1= = +
∑
;
F F gkmГ5 6
=
=
;
F F gkm maГ i7 8 3= = ∑− ;
F gkmГ9
=
,
F gk
h
h
mc
p
p
Г10 = −
β
`
;
F gk
h
h
m mac
p
p
iГ11 4= −
−∑β
`
`,
(
)
F gk m mac iГ12 4= − −∑β `.
(
)
(
)
(
)
[
]
F gk m m m H X mac k k iГ= − − − − ±∑β ` .2
(275)
(
)
[
]
F gkm m mH maГ k k i1 0= − − +∑` ,
(
)
(
)
[
]
F gkm m m H h maГ k k p i2 02= − − − +∑` ;
(
)
(
)
[
]
F gkm m m H h maГ k k p i3 12= − − − +∑` ,
(
)
(
)
[
]
{
}
F gkm m m H h h maГ k k p i4 1 12= − − − + +∑` ;
(
)
(
)
[
]
{
}
F gkm m m H h hГ k k p5 12= − − − +` ,
(
)
(
)
[
]
{
}
F gkm m m H h h hГ k k p6 1 22= − − − + +` ;
(
)
(
)
[
]
{
}
F gkm m m H h h h maГ k k p i7 1 2 32= − − − + + −
∑
` ,
(
)
(
)
[
]
{
}
F gkm m m H h h h h maГ k k p i8 1 2 3 32= − − − + + + −
∑
` ;
(
)
(
)
[
]
{
}
F gkm m m H h h h hГ k k p9 1 2 32= − − − + + +` ,
( ) ( )
[ ]
F g k
h
h
m m m H h hhhhc
p
p
k k pГ10 1 2 3 42= −
− − − ++++
β
`
` ` ;
( )
( )
[
]
F g k
h
h
m m m H h h h h h mac
p
p
k k p
p
iГ11 1 2 32
4
= −
− − − + + + +
−
∑
β
`
` ,
` `
(
)
(
)
{
}
F g k m m mH mac k k iГ12 4= − + − −
∑
β ` `.
(
)
Fgk m mac iГ= − ±
∑
β .
(274)
85
84
Поэтому величину движущих усилий семипериодной ди-
аграммы скорости (m
k
<m
k
`), применяемой при опрокидных со-
судах, в характерных точках определяют, используя рис.20 и
выражение (268), в следующей последовательности:
В начале подъема
в конце периода ускорения в разгрузочных кривых
в начале периода равномерного движения порожнего
сосуда в разгрузочных кривых с линейной скоростью V
0
в конце периода равномерного движения груженого со-
суда в разгрузочных кривых с линейной скоростью V
4
в начале периода замедленного движения в разгрузоч-
ных кривых
в конце подъемного цикла
Усилия F
4
- F
11
определяют аналогично, как и при шес-
типериодной диаграмме скорости.
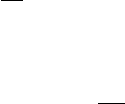
Диаграммы многоканатной скиповой подъемной уста-
новки, оборудованной приводом постоянного тока, представ-
лены на рис. 30.
Основное динамическое уравнение для рассматриваемо-
го случая, в соответствии с (268), имеет вид
Величину движущих усилий в характерных точках ди-
аграммы скорости 1-11, используя (276), определяют из выра-
жений: в начале подъемного цикла
В конце периода ускоренного движения порожнего ски-
па в разгрузочных кривых
в конце периода ускоренного движения после выхода
скипа из разгрузочных кривых
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью V
max
(
)
[
]
F gkm m m m H maГ c c k k i1
0
= + − − +
∑
α ` ;
`
( )( )
F gkm
h
h
m m m H h maГ c
p
p
c k k p i2 1 2
0
= + −
− − −
+
∑
α
`
` ;
`
( )( )
F gkm
h
h
m m m H hГ c
p
p
c k k p3 1 2= + −
− − −
α
`
` ;
( )( )
F g k c
h
h
m
h
h
m m m H h
p
p
с
p
p
c k k pГ12 2= −
− + − −
β α
` `
` ;
( )( )
F g k c
h
h
m
h
h
m m m H h
ma
p
p
с
p
p
c k k p
i
Г13
4
2= −
− + − −
−
−
∑
β α
` `
`
`;
(
)
(
)
[
]
F gk cm m m mH maГ с c k k i14 4= − − + − −
∑
β α ` `.
(
)
[
]
F gkm zm zmHГ k k1 2 1= − −` ;
(
)
(
)
[
]
F gkm zm zm H h maГ k k p i2 2 1 12= − − − +
∑
` `,
(
)
(
)
[
]
{
}
F gkm zm zm H h h maГ k k p i3 2 1 12 1= − − − + +
∑
` ` `,
Диаграммы скиповой многоканатной подъемной установки, оборудо-
ванной приводом постоянного тока, где z
1
m
k
<z
2
m
k
`;
а - скорости; б- ускорения; в - движущего усилия; г - мощности на
валу подъемной машины, затарчиваемой на подъем полезного груза.
Рис. 30
(
)
(
)
(
)
[
]
Fgk cm zm zm H X maГ k k i= − − − − ±
∑
β 2 1 2` .
(276)
87
86
в начале и конце периода движения подъемных сосудов
с ускорением a
3
в начале и конце периода движения скипов со скорос-
тью дотяжки V
4
``
в начале и конце периода стопорения подъемной маши-
ны при изменении скорости от V
4
до нуля
Величины полезной мощности в характерных точках
диаграммы скорости, как и для ранее рассмотренных случаев,
вычисляют, используя выражение (272).
Подъемные установки, оборудованные противовесом,
применяют, когда в стволе не могут быть одновременно раз-
мещены четыре подъемных сосуда, что имеет место при рас-
положении в стволе сосудов лрух подъемных установок. В
подобном случае одна из подъемных установок одноклетевая
(односкиповая) c противовесом.
Установки с противовесом в последнее время широко
применяют при многоканатных подъемных системах, когда ра-
боты ведутся одновременно на нескольких горизонтах.
Две односкиповые подъемные установки с противове-
сом несомненно выгоднее одной двухскиповой, так как при
этом обеспечивается возможность одновременной работы с
разных горизонтов, отпадает необходимость в регулировании
длины подъемного каната при его деформации под действием
концевых масс.
Противовес, подобно сосуду, с органом навивки подъем-
ной установки соединен канатом, перемещаясь в направляющих
по .стволу вслед за последним, и предназначен для уравновеши-
вания массы подъемного сосуда и части полезного груза.
К канату противовеса, согласно ПБ, предъявляются те
же требования, что и к канату подъемного сосуда.
Масса противовеса m
пр.
установок, предназначенных
только для подъема - спуска людей, равна массе клети плюс
половина массы максимального числа людей,помещающихся
в клети, а для грузолюдоких установок - не менее массы клети
плюс половина массы расчетного груза, поднимаемого в клети.
Особенность кинематики подъемной системы с проти-
вовесом заключается в том, что продолжительность подъем-
ного цикла вдвое больше, чем при двухконцевом подъеме, т.е.
подъемный сосуд вначале необходимо опустить в шахту, заг-
рузить и только затем, после соответствующей паузы, поднять
на поверхность.
Диаграммы многоканатной скиповой подъемной уста-
новки с противовесом, оборудованной асинхронным приво-
дом с фазным ротором, представлены на рис.31.
Закономерность изменения линейной скорости, в соот-
ветствии с рис.31, определяется не требованиями к кинематике
противовеса, а требованиями к кинематике скипа, так как про-
тивовес не имеет никакой связи с разгрузочными кривыми.
При определении суммарной, приведенной к радиусу
органа навивки массы поступательно движущихся и вращаю-
щихся частей подъемной системы, снабженной противовесом,
в выражении (124) вместо 2m
c
следует подставлять m
c
+m
пр
.
Основное уравнение динамики для рассматриваемого
случая имеет вид
Здесь разность статических натяжений канатов опреде-
ляют: в начале режима спуска порожнего скипа
в начале режима подъема расчетного груза
(
)
(
)
[
]
{
}
F gkm zm zm H h h hГ k k p4 2 1 12 1= − − − + +` ` `` ,
(
)
(
)
[
]
{
}
F gkm zm zm H h h h hГ k k p5 2 1 1 22 1= − − − + + +` ` `` ;
(
)
(
)
[
]
{
}
F gkm zm zm H h h h h h
ma
Г k k p
i
6 2 1 1 2 3
3
2 1= − − − + + + + −
−
∑
` ` `` ``
,
(
)
(
)
[
]
{
}
F gkm zm zm H h h h h h h
ma
Г k k p
i
7 2 1 1 2 3 3
3
2 1= − − − + + + + + −
−
∑
` ` `` `` `
;
( )
(
)
[
]
{
}
F gkm zm zm H h h h h h h hГ k k p8 2 1 1 2 3 32 1
4
= − − − + + + + + +` ` `` `` ` ,
`
( )
( )
[ ]
F g k
h
h
m zm zm H h h h h h h hc
p
p
k k pГ9 2 1 1 2 3 32 1
4
= −
− − − + + ++ + +
β
`
` ` `` `` ` ;
`
( )
( )
[ ]
F g
k
h
h
m zm zm
H h h h h h h h
ma
c
p
p
k k
p
i
Г
10
2 1
1 2 3 3 42 1
4
=
−
− − ×
× − + + + + + +
−
∑
β
`
`
` `` `` ` `
,
`
(
)
(
)
{
}
F gk m zm zmH mac k k iГ11 2 1
4
= − + − −
∑
β ` .
`
(
)
[
]
∆F gkm m m zm zm Hст c п k kГ.max р ` .= + − − −2 1
(279)
(
)
(
)
(
)
[
]
Fgk m mm zm zm H x
ma
c c п k k
i
Г= − + − − − − ±
±
∑
β р `
.
2 1 2
(277)
(
)
[
]
∆F gm m zm zmHст п c k k.max р ` ;= − − −2 1
(278)
89
88
Учитывая закономерность изменения разности стати-
ческих натяжений за время подъемного цикла и используя вы-
ражения (277) - (279) определяют величины движущих усилий
для характерных точек диаграммы скорости, представленной
на рис..31.
Усилия F
1
-F
18
определяют в следующей последователь-
ности:
в начале и конце периода ускоренного движения порож-
него скипа в разгрузочных кривых
в начале и конце периода движения с ускорением a
1
, ког-
да линейная скорость изменяется от V
0
до V
max
,
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью
в начале и конце периода основного замедления при
изменении скорости от V
max
до нуля
в начале и конце периода ускоренного движения при
подъеме расчетного груза и изменении линейной скорости от
нуля до V
max
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью при подъеме расчетного гру-
за
(
)
[
]
F gm zm zmH m maп k k c i1 2 1 0= − − − +
∑
р ` ,
(
)
(
)
[
]
F gm zm zm H h m maп k k p c i2 2 1 02= − − − − +
∑
р ` ;
(
)
(
)
[
]
F gm zm zm H h m maп k k p c i3 2 1 12= − − − − +
∑
р ` ,
(
)
(
)
[
]
{
}
F gm zm zm H h h m maп k k p c i4 2 1 1 12= − − − + − +
∑
р ` ;
(
)
(
)
[
]
{
}
F gm zm zm H h h mп k k p c5 2 1 12= − − − + −р ` ,
(
)
(
)
[
]
{
}
F gm zm zm H h hh mп k k p c6 2 1 1 22= − − − ++ −р ` ;
Диаграммы многоканатной скоиповой подъемной
установки с противовесом:
а-скоросати; б - ускорения; в - движущих усилий; г - мощности на
валу подъемной машины, затрачиваемой на подъем расчетного груза
Рис. 31
( ) ( )
[
]
{
}
F gm zm zm H h h h m maп k k p c i7 2 1 1 2 32= − − − + + − −
∑
р ` ,
(
)
[
]
F gm zm zmH m maп k k c i8 2 1 3= + − − −
∑
р ` ;
(
)
[
]
F gkm m m zm zmH maГ c п k k i9 2 1 4= + − − − +
∑
р ` ;
(
)
(
)
[
]
F gkm m m zm zm H h maГ c п k k i10 2 1 4 42= + − − − − +
∑
р ` ;
(
)
(
)
[
]
F gkm m m zm zm H hГ c п k k11 2 1 42= + − − − −р ` ,
91
90
в начале и конце периода основного замедления расчет-
ного груза при изменении линейной скорости от V
max
до V
4
в начале и конце периода дотяжки груженого скипа в
разгрузочных кривых
в начале и конце периода стопорения подъемной маши-
ны при изменении^линейной скорости от V
7
до нуля
Величины полезной мощности для характерных точек
диаграммы скорости, как и для ранее рассмотренных случаев,
определяют, используя выражение ( 272 ).
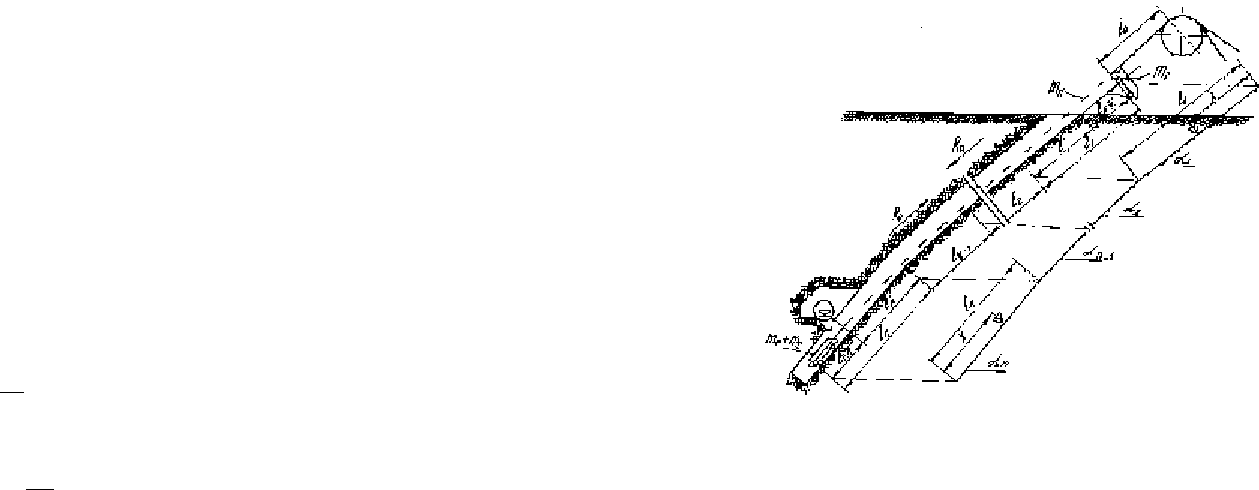
Транспорт по наклонным выработкам шахт осуществ-
ляют в скипах, грузовых или людских, специально оборудован-
ных вагонетках. В качестве органов навивки наклонных подъем-
ников используют одинарные, одинарные разрезные и двойные
цилиндрические барабаны. Уравновешивающие канаты здесь
не применяют. Наклонные подъемники - системы статически
неуравновешенные. Их стволы, пройденные по пласту, как пра-
вило, содержат участки с различными углами наклона. Поэто-
му степень статической неуравновешенности этих установок
зависит не только от положения сосудов в стволе, но и угла
наклона выработки. Учитывая, что разница в углах наклона
участков одного и того же ствола может составлять двадцать и
даже более градусов, следует констатировать сложность про-
цессов, имеющих место как в период установившегося движе-
ния, так и в период переходных процессов. На рис.32 представ-
лена схема расположения двухконцевой подъемной машины,
оборудованной скипами относительно ствола шахты. Стати-
ческие сопротивления на радиусе органа навивки здесь опреде-
ляют как разность статических натяжений поднимаемой и опус-
каемой ветвей подъемного каната, т.е.
(
)
(
)
[
]
{
}
F gkm m m zm zm H h hГ c п k k12 2 1 4 52= + − − − − +р ` ;
(
)
(
)
[
]
{
}
F gkm m m zm zm H h h
ma
Г c п k k
i
13 2 1 4 5
6
2= + − − − − + −
−
∑
р `
,
(
)
(
)
[
]
{
}
F km m m zm zm H h h h
ma
Г c п k k
i
14 2 1 4 5 6
6
2= + − − − − + + −
−
∑
р `
;
(
)
(
)
[
]
{
}
F gkm m m zm zm H h h hГ c п k k15 2 1 4 5 62= + − − − − + +р ` ,
( ) ( )
[ ]
F g k
h
h
m m m zm zm H h hhhc
p
p
c п k k pГ16 2 1 4 5 62= −
+ − − − − +++
β
`
` ` ;р
( )
( )
[ ]
F g
k
h
h
m m m zm zm
H h h h h
ma
c
p
p
c п k k
p
i
Г
17
2 1
4 5 6
8
2
=
−
+ − − − ×
× − + + +
−
∑
β
`
`
`
,
р
(
)
(
)
[
]
F gk m m m zm zmH mac c п k k iГ18 2 1 8= − + − + − −
∑
β р ` .
Схема расположения подъемной машины относительно ствола шахты
( к выводу основного уравнения динамики наклонного подъема):
l
1
-l
n
- длины наклонных участков ствола, м; α
1
-α
n
- углы наклона
этих участков, град.; l
з.б.
и l
п.б.
- длины соответсвенно загрузочного
и приемного бункеров, м.
Рис. 32
(
)
(
)
(
)
( )
( )
( )
( )
( )
F g
zm m f mlx
f ml
f mll
f
R
g
zm f mlx
f
R
ст
c n n k п
n n k П
П
c k
Г
П П k
=
+ + + + ×
× + + ×
× + + + + ×
× +
+ −
−
− + + ×
× −
+
−
− −
sin cos
sin cos
sin cos
sin cos
sin cos
sin cos
α α
α α
α α
α α
α α
α α
1
2
1 2 1 1 0
1 2 1
1 1 1 0
1 2 1
1
K
0,
93
92
где z - число подъемных сосудов; l
0
- расстояние от верх-
ней подъемной площадки до точки соприкосновения каната с
органом навивки, м; x - текущее значение пройденного сосу-
дами пути от начала до конца подъемного цикла м;
и -
статические вредные сопротивления движению соответ-
ственно поднимаемой и опускаемой ветвей канатов, Н.
После несложных, но громоздких упрощений, решая со-
вместно (279) и (259), получают основное уравнение динами-
ки подъема, имеющего ствол с переменным углом наклона
В выражении (280) при определении величины движущих
усилий в характерных точках диаграммы скорости для подъемных
установок, оборудованных сосудами, где отсутствует механическая
связь между последними и элементами разгрузочного комплекса
(вагонетки с глухим кузовом для транспорта груза, специальные
вагонетк и для транспорта людей по наклонным выработкам), ко-
эффициент β
c
равен нулю. При этом применяют трехпериодную тра-
пецеидальную диаграмму скорости. Здесь диаграмма движущих уси-
лий аналогична по форме и сути, ранее рассмотренной (рис. 26,
m
k
`=0, где система подъема статически неурановешенная). Величи-
ну движущих усилий в характерных точках трехпериодной диаг-
раммы скорости для двухконцевой наклонной подъемной установ-
ки в соответствии с выражением (280) определяют:
в начале и конце периода равномерно-ускоренного дви-
жения
где h
1
- путь, пройденный подъемными сосудами за рас-
сматриваемый период, м;
в начале и конце периода движения подъемных сосудов
с максимальной скоростью
R g
k
mП nГ=
−
1
2
sinα
R g
k
m Г0 1
1
2
=
−
sinα
( )
( ) ( )
[ ]
( )
( )
Fg
z
k
m zm m l x
zf m m mf l x
m
l f
l f
zm
k
m
mx
zmf mf
c c k п
n c k п
n k
п n n
c
k
c k
Г
Г
Г
=
+
−
+ + −
×
× + + + − ×
× +
+ +
+ + +
−
−
−
−
+
+
+
+ +
− − −
1
2
1
2
1 2
1 2
1 1 2 1
1
1 2
1 1
β
α
α
α α
α α
α
sin
cos
sin cos
sin cos
sin
K
( )
x
mai
cos
.
α1
±
∑
(280)
(
)
( )
[ ]
( )
( )
[ ]
F g
z
k
m m ml
zf m m mfl
m
l f
l f
zm
k
m
zmf
ma
Г
Г
Г
c kп n
c k п n
k
п n n
c
c
i1
1 2
1 2
1 1 2 1
1
1 1
1
1
2
1
2
1 1
=
+
+ +
× +
+ + + +
+
+ +
+ + +
−
− −
−
+
+
+
− − −
∑
sin
cos
sin cos
sin cos
sin
cos
,
α
α
α α
α α
α
α
K
(
)
( )
( ) ( )
[ ]
( )
( )
( )
( )
F g
z
k
m m m l h
zf m m mf l h
m
l f
l f
zm
k
m mh
zmf mfh
Г
Г
Г
k
c k п n
c k п n
k
п n n
c k
c
2
1
1 2 1
1 2
1 1 2 1
1 1
1 21 1
1
2
1
2
1 1
=
+
+ + −
+
+ + + − +
+
+ +
+ + +
−
− −
−
+
+
+ +
− − −
sin
cos
sin cos
sin cos
sin
cos
α
α
α α
α α
α
α
K
+
∑
mai 1,
(
)
( )
( ) ( )
[ ]
( )
( )
( )
( )
F g
z
k
m m mlh
zfm m mflh
m
l f
l f
zm
k
m mh
zmf mfh
Г
Г
Г
c k п n
c k п n
k
п n n
c k
c k
3
1
1 2 1
1 2
1 1 2 1
1
1 21 1
1
2
1
2
1 1
=
+
+ + −
+
+ + + − +
+
+ +
+ + +
−
− −
−
+
+
+ +
− − −
sin
cos
sin cos
sin cos
cos
α
α
α α
α α
α
K
,
95
94
где h
3
- путь, который должны пройти сосуды с конца пе.-
риода равномерного движения до конца подъемного цикла, м;
Уравнения, для определения величин усилий в характе
рных точках диаграммы скорости F
1
-F
6
, составлены для усло-
вий, когда h
1
и h
3
значительно меньше l
n
и l
1
.
Подъемные установки, содержащие участки ство-
ла со значительной разницей в углах наклона, имеют,
как видно из анализа основного динамического уравне-
ния, значительную степень статической неуравновешен-
ности, определяемую не только положением сосуда в
стволе, но и углом наклона выработки, что в свою оче-
редь обуславливает, если α
n
>α
n-1
>...α
1
, в конце подъем-
ного цикла, отрицательные значения величин движущих
усилий F
5
и F
6
, т.е. в этот период необходимо примене-
ние тормоза.
В зависимости от длительности этого периода может
использоваться: механический тормоз - при кратковременном
воздействии последнего на тормозной обод, электродинами-
ческий, если длительность тормозного периода превышает
несколько секунд.
Уравнение (280) для условий, когда наклонный ствол
имеет длину подъема L, а угол наклона α постоянный, транс-
формируется в выражение
Легко заметить, что при α=90° выражение (281) приоб-
ретает вид основного уравнения динамики для вертикальных
подъемных систем - (273).
Для транспорта людей и грузов по наклонным вы-
работкам шахт в подземных условиях используют ма-
лые подъемные машины типа Ц и 2Ц, оборудованные
пружинно-гидравлическим или -пневматическим приво-
дами тормоза. Двухбарабанные подъемные машины в
этих условиях используются крайне редко, стволы со-
держат часто участки со значительной разницей в уг-
лах наклона, что обуславливает неординарную специ-
фику условий эксплуатации таких подъемных устано-
вок.
( )
( )
[ ]
( )
( )
( )
[ ]
( )
( )
F g
z
k
m m mh
zf m m mfh
zm
k
m m l h
zmf mf l h m
l f
l f
Г
Г
Г
c k
c k
c k п n
c k п n k
п n п
4
3 1
1 2 3 1
3
2 2 3
1 2
1 1 2 1
1
2
1
2
1 1
=
+
+ +
+
+ + + −
− −
−
+ −
−
− − − − ×
×
− − − −
− −
− −
sin
cos
sin
cos
sin cos
sin cos
α
α
α
α
α α
α α
K
,
( )
( )
[ ]
( )
( )
( )
[ ]
( )
( )
F g
z
k
m m mh
zfm m mfh
zm
k
m mlh
zmf mf l h m
l f
l f
Г
Г
Г
c k
c k
c k п n
c k п n k
п n п
5
3 1
1 2 3 1
3
1 2 3
1 2
1 1 2 1
1
2
1
2
1 1
=
+
+ +
+
+ + + −
− −
−
+ −
−
− + − − ×
×
− − − −
− −
− −
sin
cos
sin
cos
sin cos
sin cos
α
α
α
α
α α
α α
K
−
∑
mai 3,
( )
( )
( )
( )
F g
z
k
m m
zf m m
zm
k
m ml
zmf mfl m
l f
l f
Г
Г
c
c
c Г kп n
c k п n k
п n п
6
1
1 1
1 2
1 2
1 1 2 1
1
2
1
2
1 1
=
+
+
+
+ + −
− −
−
+
−
− + − ×
×
− − − −
− −
− −
sin
cos
sin
cos
sin cos
sin cos
α
α
α
α
α α
α α
K
−
∑
mai 3,
(
)
( )
[
]
( )
[ ]
F gk m mL x
gzm m f mLf ma
c Г k
Г c k i
= − + − +
+ + + ±
∑
β α
α
2
2 1 2
sin
cos .
(281)
97
96