Седалищев В.Н. Методы и средства измерений электрических величин
Подождите немного. Документ загружается.


Недостаток – ограничены возможности по уровню сигнала, диапазону
частот, изменением мощности, сильно влияют на объект измерения, сложная
технология изготовления, большие габариты.
В основе конструкции принципа работы положено преобразование
электромагнитной энергии в механическую. Основные типы измерительных
механизмов (ИМ) основаны на использовании параметров кулоновских сил,
электромеханических взаимодействий катушек между собой. При этом
используют дополнительные
преобразователи (масштабные и специальные).
Любой ЭИП состоит из ряда функциональных преобразователей,
каждый из которых решает свою задачу в цепи преобразований. Так, самый
простой измерительный ЭИП прямого преобразования состоит из трех
основных преобразователей: измерительной цепи, измерительного
механизма и отсчетного устройства.
Измерительная цепь обеспечивает преобразование электрической
измеряемой величины в промежуточную электрическую величину (
ток или
напряжение), функционально связанную с измеряемой величиной и
воздействующей на измерительный механизм.
Измерительный механизм является электромеханическим
преобразователем, осуществляющим преобразование электрической
величины в наглядное аналоговое показание. На магнитном воздействии
электрического тока основаны магнитоэлектрический, электромагнитный,
индукционный, электродинамический и вибрационный измерительные
механизмы. Тепловое воздействие электрического тока используют
биметаллический и тепловой измерительные механизмы. На
взаимодействии
заряженных электродов, находящихся под напряжением, основан принцип
работы электростатического измерительного механизма.
Отсчетное устройство состоит из указателя, жестко связанного с
подвижной частью ИМ, и неподвижной шкалы. Указатели бывают
стрелочные и световые. Шкала – это совокупность отметок в виде штрихов,
расположенных вдоль линии, по которым определяют числовое значение
измеряемой величины.
В общем
случае на подвижную часть ИМ при ее движении
воздействуют моменты: вращающий
âð
Ì
противодействующий
ïð
Ì
и
успокоения
óñï
Ì
.
Вращающий момент для ИМ, использующих силы электромагнитного
поля:
α
d
dW
Ì
âð
=
, (2.1)
где
dW
- изменение энергии поля,
α
d
- изменение угла отклонения подвижной части.
Противодействующий момент в ЭИП необходим для создания
однозначного соответствия измеряемой величины определенному
отклонению подвижной части. В аналоговых ЭИП противодействующий
момент создается либо при помощи спиральных пружин, растяжек, подвесов,
либо за счет энергии электромагнитного поля (в логометрах). В случае,
когда противодействующий момент создается спиральной пружиной:
α
êÌ
ïð
=
, (2.2)
где к – удельный противодействующий момент, зависящий от
геометрических размеров и материала пружины.
Момент успокоения является моментом сил сопротивления движению
подвижной части ИМ и пропорционален угловой скорости отклонения:
(
)
dt
d
ðÌ
óñï
α
=
, (2.3)
где р – коэффициент успокоения (демпфирования).
В ИМ применяют магнитоиндукционные, воздушные и жидкостные
успокоители.
Несмотря на большое разнообразие конструкций и типов приборов все
они имеют ряд общих узлов и деталей: корпус, шкала, указатель, устройства
для установки и уравновешивания подвижной части, создания
противодействующего момента и успокоения, корректор, а в
высокочувствительных приборах –
арретир.
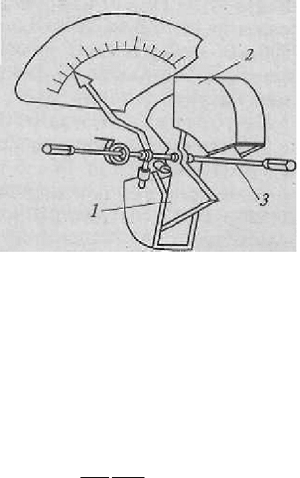
2.2 Измерительные приборы магнитоэлектрической системы
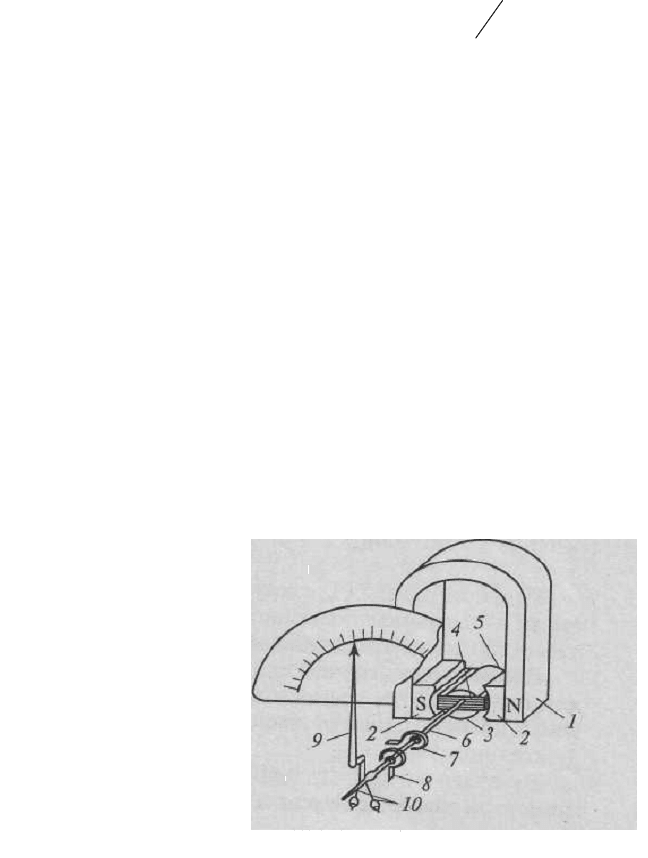
Конструктивно измерительные механизмы (ИМ) приборов данной
системы могут быть выполнены с подвижным магнитом или с подвижной
катушкой.
Рис. 2.1 Устройство прибора магнитоэлектрической системы:
1 – постоянный магнит; 2 – полюсные наконечники; 3 – неподвижный
сердечник; 4 – обмотка; 5, 6 – полуоси; 7, 8 – пружины; 9 – стрелка;
10 - уравновешивающий груз.
Динамика подвижной системы описывается с помощью следующих
выражений:
α
ω
⋅=
⋅
⋅
⋅
=
KM
ISBM
np
Bp
, (2.4)
Bp
M
- момент вращения;

np
M
- противодействующий момент;
K
ISB
MM
npBp
⋅⋅⋅
=
=
ω
α
(2.5)
В – магнитная индукция в зазоре;
S – площадь рамки;
ω – число витков в катушке;
К – жесткость пружины.
α
- угол поворота.
Гасители колебаний: пневматически жидкостные и на вихревых токах.
Противодействие пружины используется для подвода тока к рамке.
Подвижная система крепится с помощью растяжек, анкерных соединений.
Достоинства: характеризуется высокой линейностью,
чувствительностью, стабильностью показателей, малое собственное
потребление мощности, большой диапазон измерений, на показания прибора
не влияют внешние магнитные и электрические
поля.
Недостатки: без преобразователей приборы используют только в цепях
постоянного тока, имеют малую перегрузочную способность, сложны и
дороги, нВ показания влияет изменение температуры.
Применение: магнитоэлектрические ИМ используются в амперметрах,
вольтметрах, омметрах, гальванометрах, в электронных приборах для
измерения различных физических величин.
В логометрах этой системы
np
M
создаётся второй
противодействующей рамкой, что позволяет измерять отношение токов и
делает показания прибора независимыми от напряжения источника питания.
Подвижная система таких приборов состоит из двух жестко закрепленных
между собой под определенным углом рамок. Особой формой полюсных
наконечников и сердечника, находящегося между ними, искусственно
создается неравномерное поле магнитное поле от постоянного
магнита. Токи
к рамкам подводятся через безмоментные токоподводы, не создающие
противодействующего момента. Направление токов в рамках логометра
выбирается так, чтобы моменты, создаваемые рамками, были направлены в
противоположные стороны. Тогда в общем виде можно записать:
);(
11
α
fIÌ
âð
⋅
=
).(
22
α
fIÌ
ïð
⋅
=
(2.6)
Равновесие такой подвижной системы наступает при равенстве
моментов, действующих на рамки, что определяет соотношение токов вида:
α
~
2
1
I
I
. (2.7)
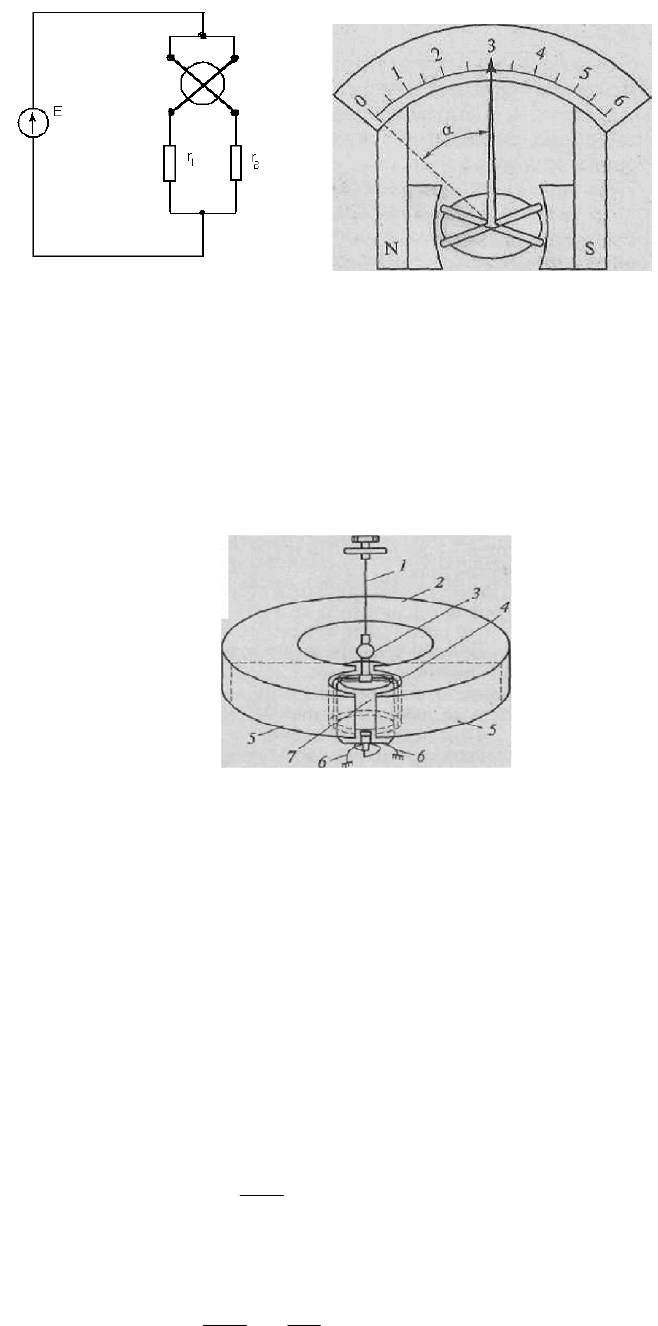
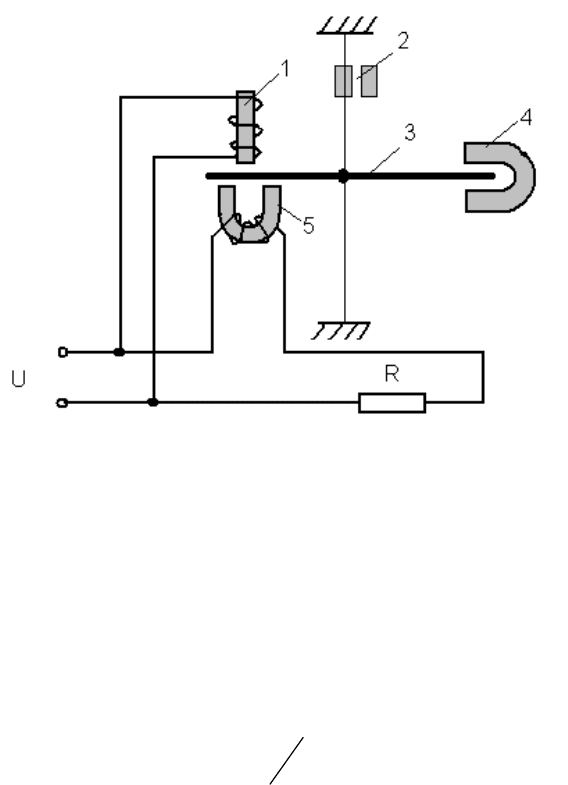
Рис. 2.2 Электрическая схема и устройство магнитоэлектрического
логометра.
У логометра при повороте рамки магнитное поле в воздушном зазоре
изменяется неравномерно.
На рисунке показана схема устройства магнитоэлектрического
гальванометра постоянного тока.
Рис. 2.3 Схема устройства магнито-электрического гальванометра:
1 – подвес; 2 постоянный магнит; 3 – зеркало; 4 – рамка; 5 – полюсные
наконечники; 6 – токоподводы; 7 – неподвижный сердечник.
На рамку ИМ при подаче тока действуют вращающий момент,
пропорциональный величине измеряемого тока, противодействующий
момент, создаваемый закручивающимся подвесом и момент успокоения.
Коэффициент успокоения такой подвижной системы (р) определяется
конструктивными параметрами гальванометра (Ψ) и
значениями
сопротивлений измерительной цепи. Изменяя величину сопротивления
можно изменять коэффициент успокоения системы.
Известно, что движение вращающегося тела определяется уравнением
M
dt
d
J
Σ=
2
2
α
, (2.8)
где J – момент инерции подвижной системы.
Для гальванометра это уравнение примет вид
Ψ=++
Ik
dt
d
P
dt
d
J
α
αα
2
2
. (2.9)
Интеграл этого дифференциального уравнения второго порядка с
постоянными коэффициентами дает описание динамики подвижной системы
прибора:
)(t
ϕ
α
=
.

Рис. 2.4 Передаточная характеристика измерительного устройства.
При слабом демпфировании такой динамической системы колебания
подвижной части гальванометра будут постепенно затухать из-за потерь на
трение подвижной части прибора (режим – 1).
При критическом значении коэффициента демпфирования происходит
быстрое установление стационарного состояния подвижной части прибора
(режим - 2). Величина критического сопротивления определяет
динамические характеристики гальванометра,
и значение этого
сопротивления указывается на шкале прибора.
При сильном демпфировании колебаний в системе не будет
происходить, движение рамки будет апериодическим (кривая - 3).
К метрологическим характеристикам таких приборов относится:
чувствительность, период собственных колебаний, внешнее, и полное
критическое значения сопротивлений.
Гальванометры используют для измерения малых токов (до
12
10
−
А) и
напряжений (до
4
10
−
В), а также в качестве нуль - индикаторов.
Резонансные гальванометры имеют подвижную часть, настраиваемую в
резонанс с внешним сигналом. По ширине световой полосы судят о величине
амплитуды сигнала.
2.3 Приборы электромагнитной системы
В электромагнитных измерительных приборах для перемещения
подвижной части используется энергия магнитного поля системы, состоящей
из катушки, по которой
протекает измеряемый ток, и одного или нескольких
сердечников, выполненных из ферромагнитных материалов.
Распространение получили три конструктивных варианта исполнения
ЭМИП: с плоской и круглой катушкой; с замкнутым магнитопроводом.
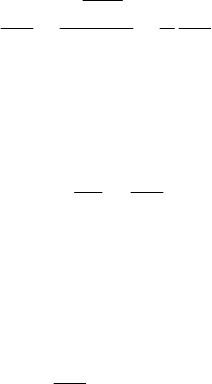
Рис. 2.5 Схема устройства электромагнитного прибора: 1 - ось; 2 – пружина;
3 – катушка; 4 – стрелка; 5 – сердечник; 6 – успокоитель.
Вращающий момент, создаваемый катушкой с током и действующий
на подвижную систему ИМ выражается формулой:
2
2
2
1
)
2
(
I
L
LI
w
M
Bp
ααα
∂
∂
=
∂
∂
=
∂
∂
=
. (2.10)
Противодействующий момент, действующий на рамку пропорционален
углу ее поворота. Уравнение измерительного преобразования прибора имеет
вид:
2
2
2
1
α
α
∂
∂
=
L
I
ê
. (2.11)
Из данного выражения следует, что шкала прибора электромагнитной
системы квадратичная. Поэтому для обеспечения ее равномерности (начиная
с 1/5 части верхнего предела измерения) используют нелинейную
зависимость индуктивности катушки от угла поворота подвижной системы:
α
∂
∂
L
~
)(
α
f
. (2.12)
Достоинства: простота конструкции, высокая надежность, высокая
перегрузочная способность, возможность использования в цепях постоянного
и переменного тока.
Классы точности: 1,0; 1,5; 2,5. Частотный диапазон: 45…10000 Гц.
Диапазон измеряемого тока: 0,005…300 А при прямом включении ИМ в
измерительную цепь и до 20 кА с измерительным трансформатором.
Недостатки: большая собственная потребляемая мощность, низкая
чувствительность, неравномерная шкала, влияние внешних
тепловых и
магнитных полей, зависимость показаний от частоты тока.
Применение. Используются для измерения постоянных, переменных
токов, напряжений, разности фаз, частоты, индуктивности и емкости.
2.4 Приборы электродинамической системы
В электродинамических измерительных приборах для перемещения
подвижной части используется энергия системы, состоящей из подвижной и
неподвижной рамок с протекающим по ним током. Неподвижная
часть
может иметь одну, чаще две катушки, соединенные между собой
параллельно или последовательно, намотанные медным проводом, внутри
которых располагается подвижная катушка, обычно бескаркасная. Для ее
включения в цепь измеряемого тока используются пружинки или растяжки.
Успокоение подвижной части – воздушное или магнитоиндукционное.
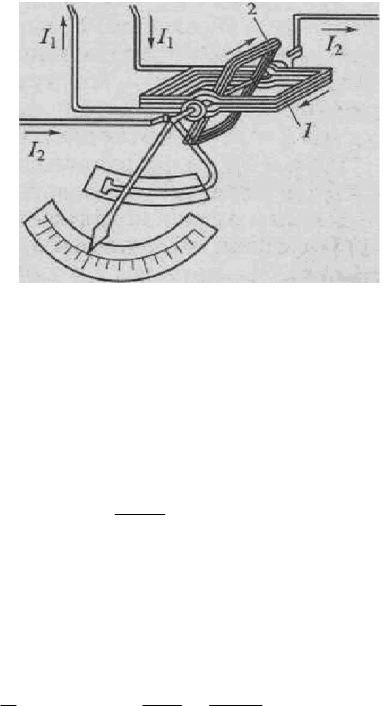
Рис. 2.6 Схема устройства электродинамического прибора:
1 - неподвижная катушка; 2 — подвижная катушка
Дифференцирование формулы для магнитной энергии системы
прибора, состоящей из двух взаимодействующих катушек, дает выражение
для вращающего момента, действующего на подвижную часть прибора:
Bp
M
~
ψ
α
cos,
2
2
II
M
∂
∂
(2.13)
M – взаимная индуктивность подвижной и неподвижной катушек.
Приравняв вращающий и противодействующий моменты,
действующие на рамку, получим уравнение измерительного преобразования
прибора в виде:
α
ϕα
d
dM
II
k
⋅⋅⋅= cos
1
21
ϕ
α
cos
)(
21
⋅⋅= II
k
f
. (2.14)
При последовательном включении подвижных и неподвижных катушек
в измерительную цепь, реализуется квадратичная зависимость угла поворота
рамки от величины измеряемого тока или напряжения. Приборы данной
системы используют для измерения мощности нагрузки в цепях постоянного
и переменного тока:
α
~
ϕ
cos
⋅
⋅
UI
~ P. (2.15)
С целью повышения чувствительности приборы данной системы могут
содержать ферромагнитные материалы в магнитной цепи измерительного
механизма. Такие приборы называются ферродинамическими. Но их
точность ниже чем у электродинамических. Приборы данной системы кроме
температурной и частотной погрешностей имеют еще дополнительные
составляющие, вызванные наличием сердечника. К ним относятся:
• погрешность от
нелинейности кривой намагничивания;
• погрешность потерь в материале на гистерезис и вихревые токи.
Достоинства приборов электродинамической системы: высокая
точность (при отсутствии ферромагнетика), не боятся вибраций, малое
влияние внешних магнитных полей, есть возможность переключения на два
диапазона измерения путем катушек последовательного или параллельного
соединения катушек.
Недостатки: на постоянном токе погрешность возрастает за
счет
потерь на гистерезис, сказывается влияние частоты питающего напряжения и
температуры окружающей среды.
2.5 Приборы электростатической системы
В электростатических измерительных приборах для перемещения
подвижной части используется принцип взаимодействия двух или
нескольких заряженных проводников, поэтому приборы данной системы
измеряют напряжение, а не ток, как рассмотренные выше ИМ.
Конструктивно электростатические ИМ можно представить в виде
плоского конденсатора с подвижными электродами. Перемещение
подвижной части связано
с изменением электрической емкости системы,
которая может быть осуществлена изменением взаимной площади
электродов или изменением расстояния между ними. На рисунке приведена
схема устройства электростатического прибора.
Рис. 2.7 Устройство прибора электростатической системы:
1 – подвижная пластина; 2 – неподвижные пластины; 3 – ось.
Приравнивая вращающий и противодействующий моменты,
действующие на подвижную систему ИМ, получим уравнение
измерительного преобразования прибора:
α
~
2
2
1
U
c
k
α
∂
∂
. (2.16)
Из данной формулы следует, что шкала прибора квадратичная, поэтому
конструктивно добиваются линеаризации шкалы, начиная с 1/5 ее верхнего
предела, используя нелинейную зависимость емкости конденсатора от угла
поворота подвижной системы ИМ. С помощью приборов данной системы
можно измерять постоянное и переменное напряжение.
Достоинства: ИМ почти не потребляет энергии в цепях постоянного
тока и очень незначительно в цепях переменного тока. Имеют широкий
частотный диапазон (до 10 МГц), обеспечивают высокую точность
измерений, используются для измерения напряжения в широком диапазоне
(от 10 В до 7,5 кВ), независимость показаний от температуры, частоты,
формы сигнала, не влияют внешние магнитные
поля.
Недостатки: низкая чувствительность, неравномерная шкала, влияние
электростатических полей.
Применение. Электростатические приборы используются в цепях
постоянного и переменного тока в качестве вольтметров. Для расширения
пределов измерения по напряжению используют резисторные или емкостные
делители напряжений.
2.6 Индукционные измерительные приборы
В индукционных измерительных приборах особым расположением
катушек относительно проводящего диска или цилиндра получают
вращающееся электромагнитное поле, которое индуцирует в них вихревые
токи, что вызывает возникновение вращающего момента.
Противодействующий момент создается бестоковыми пружинами.
Зависимость показаний ИМ от частоты тока и температуры
окружающей среды ограничивает область применения приборов данной
системы. Их используют
в самопишущих приборах, в качестве указателей
вращающегося поля, в частотомерах и счетчиках электрической энергии.
Упрощенная схема однофазного индукционного счетчика электрической
энергии приведена на рисунке.
Рис. 2.8 Устройство индукционного счетчика: 1 – катушка напряжения; 2 –
счетный механизм; 3 – алюминиевый диск; 4 постоянный магнит; 5 – токовая
катушка.
Анализ работы индукционного счетчика показывает, что его
вращающий момент пропорционален активной мощности переменного тока:
PkUIKÌ
âð 11
cos
=
=
ϕ
. (2.17)
На вращающийся диск действует тормозной момент, создаваемый
постоянным магнитом, пропорциональный скорости вращения диска:
dt
d
KÌ
Ò
α
2
=
. (2.18)
При неизменной активной мощности в цепи моменты, действующие на
диск равны. Проинтегрировав по времени уравнение для данного состояния
системы получим:
NCN
k
k
W ⋅=⋅=
π
2
1
2
, (2.19)
где: С – номинальная постоянная счетчика (количество энергии,
учитываемое счетчиком за один оборот диска).
Количество электричества, реально прошедшее за один оборот диска,
зависит от тока и характера нагрузки, внешних условий, характеризуется
действительной постоянной, которая отличается от номинальной.
Важным параметром счетчика является порог чувствительности, под
которым понимается минимальная нагрузка, выраженная
в процентах от
номинальной. Порог чувствительности не должен превышать 0,4% - 0,5%.
Счетчик также не должен иметь самоход при разомкнутой токовой цепи.
Применение: индукционные счетчики используют для измерения
электрической энергии в однофазных и трехфазных цепях.
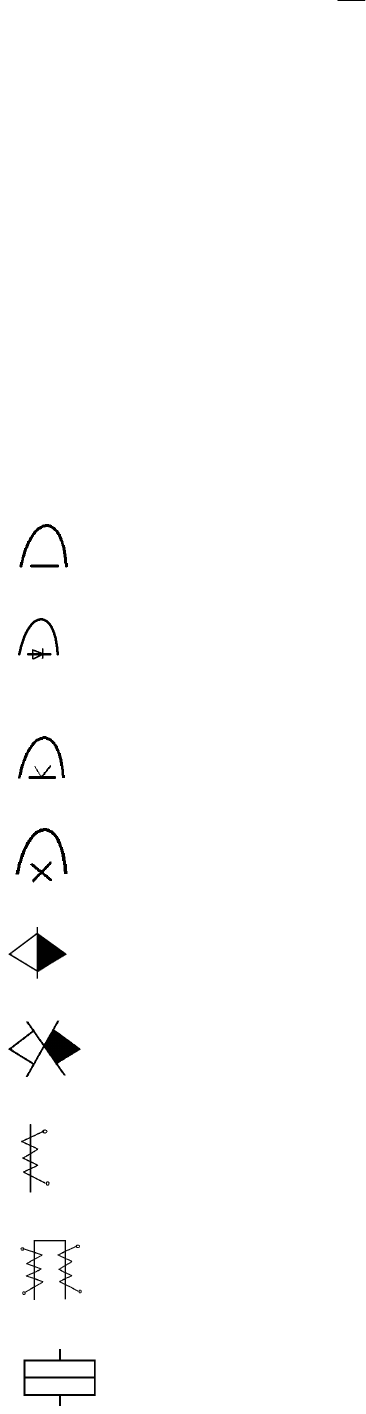
2.7 Условные обозначения, наносимые на шкалу прибора
электромеханической системы
Прибор магнитоэлектрической системы с подвижной рамкой.
Прибор магнитоэлектрической системы с подвижной рамкой с
дополнительным выпрямителем в измерительной цепи.
Прибор магнитоэлектрической системы с подвижной рамкой с
дополнительным термопреобразователем в измерительной цепи.
Логометр магнитоэлектрической системы с подвижной рамкой.
Прибор магнитоэлектрической системы с подвижной магнитом.
Логометр магнитоэлектрической системы с подвижной магнитом.
Прибор электромагнитной системы.
Логометр электромагнитной системы.
Прибор электродинамической системы.