Щербина Ю.В. Автореферат - Методология исследования и проектирования автоматизированных систем управления в рулонных печатных машинах
Подождите немного. Документ загружается.


На правах рукописи
Щербина Юрий Владимирович
МЕТОДОЛОГИЯ ИССЛЕДОВАНИЯ И ПРОЕКТИРОВАНИЯ
АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ В РУЛОННЫХ
ПЕЧАТНЫХ МАШИНАХ
Специальность 05.13.06 – Автоматизация и управление технологическими
процессами и производствами
(полиграфические средства информации и информационные системы)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
доктора технических наук
Москва 2010

2
Работа выполнена на кафедре автоматизации полиграфического производства
Московского государственного университета печати
Официальные оппоненты: доктор технических наук, профессор
Дивеев Асхат Ибрагимович
доктор технических наук, старший научный
сотрудник
Пономарев Юрий Валентинович
доктор технических наук, профессор
Куликов Григорий Борисович
Ведущая организация: Северо-Западный институт печати
Санкт-Петербургского государственного
университета технологии и дизайна
Защита состоится « 28 » октября 2010 г. в 14.00 часов на заседании
Диссертационного совета Д212.147.03 при Московском государственном
университете печати по адресу: 127550, Москва, ул. Прянишникова, д.2а, ауд.
№ 1211.
С диссертацией можно ознакомиться в библиотеке университета.
Автореферат разослан « _17_ » сентября_ 2010 г.
Ученый секретарь
диссертационного совета Д212.147.03
д.т.н., профессор
В.Н.Агеев
3
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Современное высокопроизводительное печатное
оборудование оснащается автоматизированными системами управления (АСУ),
способными обеспечивать как его предварительную настройку под конкретный
заказ, так и текущее управления ходом печати. Высокие скорости работы
рулонных печатных машин (РПМ) предопределяют наличие интенсивных
нагрузок, в результате действия которых учащаются обрывы ленты, растет
амплитуда колебаний ее натяжения, а также образуются провисания бумажного
полотна. Из-за этого растет количество брака и снижается эффективность
использования дорогостоящей рулонной печатной техники. Лентопроводные и
краскопитающие устройства рулонных печатных машин являются объектами
сложных нелинейных, нестационарных и многоконтурных систем
автоматизированного управления технологическими параметрами с
существенным чистым запаздыванием, которые находятся под действием
различного рода как монотонных, так и колебательных возмущений. В связи с
этим возникает потребность в развитии теории и проведении вычислительных
экспериментов, которые позволяют выделить и проанализировать те
динамические явления, которые ранее по разным причинам не принимались во
внимание. Разработка теоретических методов и математическое моделирование
дают возможность исследовать типовые режимы работы систем управления
подачей бумаги и краски, а также установить важные закономерности их
взаимодействия в рамках единого динамического комплекса. Это позволяет
определить новые подходы к проектированию конструкций этих устройств,
разработать более качественные методики настройки систем автоматизации для
того, чтобы повысить эффективность эксплуатации рулонного оборудования, а
также обеспечить высокое качество печати.
Цель работы состоит в разработке методологии исследования и
проектирования автоматизированных систем управления в рулонных печатных
машинах для повышения качества их работы на высокоскоростных режимах и в
условиях действия интенсивных возмущений. Работа выполнялась в
4
соответствии планами госбюджетных научных исследований кафедры
автоматизации полиграфического производства МГУП.
Данная цель обусловила постановку следующих задач исследования:
- на основе анализа известных лентопитающих устройств выявить
основные тенденции развития системы управления натяжением ленты и
определить их типовые структурные схемы;
- провести сравнительный частотно-динамический анализ типовых
систем управления натяжением ленты для определения качества их работы по
их динамическим характеристикам;
- разработать методику расчета и проектирования автоматизированных
систем управления натяжением ленты, обеспечивающую повышение качества
их функционирования при действии вынужденных колебаний;
- разработать методику исследования нелинейных и нестационарных
систем управления натяжением ленты с целью анализа их динамики при
наличии параметрических возмущений, обусловленных эксцентриситетом и
овальностью рулона;
- провести теоретический анализ автоматизированных систем
управления приводкой красок и сформулировать принципы математического
описания задачи приводки в многокрасочных РПМ;
- рассмотреть закономерности построения систем автоматизированного
управления подачей краски, обобщить результаты их экспериментального и
теоретического исследования, а также определить направления исследования
их динамики на основе методов математического моделирования.
- разработать теоретические основы исследования динамики движения
краски в красочных аппаратах, позволяющие определять их динамические
свойства и частотные характеристики на этапах их конструкторского
проектирования и подготовки технических заданий.
Методы исследования. При решении поставленных задач
использовались методы частотного анализа, аппарата теории обыкновенных
дифференциальных уравнений, операционного исчисления,
z
-преобразования
5
и структурных преобразований, векторной алгебры, численные методы анализа
динамики непрерывных и дискретных систем с помощью современных пакетов
компьютерной математики (MathCAD, Matlab, Simulink, Maple).
Научная новизна работы:
1. Разработана методология частотно-динамического анализа
лентопитающих устройств, с помощью которой проведено сравнительное
исследование качества их работы при различных вариантах структуры систем
управления натяжением бумажной ленты и получены зависимости параметров
установившихся колебаний натяжения ленты, обусловленных нарушениями
геометрической формы рулона.
2. Выявлены резонансные явления в устройствах подачи ленты, которые
возникают в результате их взаимодействия с параметрическими колебаниями,
обусловленными нарушением идеальной геометрической формы рулона.
3. Разработаны математические модели систем управления натяжением
ленты, реализованные на базе современных средств компьютерной математики,
с помощью которых могут проводиться вычислительные эксперименты по
исследованию особенностей их динамики при различных вариантах структуры,
типов управляющих устройств и внешних возмущений.
4. Впервые получено интегральное уравнение приводки, которое
использовано для построения различных математических моделей
автоматизированных систем управления совмещением оттисков в
многокрасочных рулонных печатных машинах.
5. Разработана методология математического моделирования систем
автоматизированного управления приводкой красок с учетом упруго-вязких
свойств ленты, которая показала хорошее соответствие имеющимся
теоретическим и практическим данным.
6. Исследованы особенности функционирования систем
автоматизированного управления совмещением оттисков с цифровыми
регуляторами и разработан новый адаптивный алгоритм его работы,
6
обеспечивающий повышение точности совмещения красок в установившихся
режимах.
7. Впервые разработан новый аналитический метод векторно-
матричного описания динамики красочных аппаратов, на основе которого
определяются их передаточные функции и уравнения переноса краски по
различным каналам.
На защиту выносятся следующие научные положения и результаты:
1. Теоретические основы и методология проектирования систем
управления натяжением бумажной ленты, позволяющая связать их рабочие
характеристики с технологическими и настроечными параметрами и
обеспечить повышение качества их работы при наличии возмущений.
2. Теоретические основы и математические модели систем управления
совмещением красок на основе интегрального уравнения приводки,
позволяющие исследовать их динамические свойства с учетом упруго-вязких
свойств ленты.
3. Результаты вычислительных экспериментов по исследованию
динамики систем автоматизированного управления натяжением бумажной
ленты, совмещением красок на цветных оттисках при различных вариантах их
структуры, алгоритмов работы управляющих устройств и типов возмущающих
воздействий.
4. Аналитический метод исследования динамики красочных аппаратов с
помощью векторно-матричных преобразований, а также методы
приближенного описания их динамических свойств с помощью линейных и
дискретных моделей.
Практическая полезность работы обусловлена тем, что ее результаты
позволяют повысить качество функционирования автоматизированных систем
управления подачей бумаги в рулонном печатном оборудовании. В
диссертации разработаны методологические принципы проектирования,
расчета и настройки лентопитающих устройств. Выявлены неблагоприятные
режимы работы систем управления лентопитающими и лентопроводящими
узлами рулонного оборудования и даны рекомендации по их предотвращению.
7
Результаты работы реализованы на полиграфических предприятиях «Пронто-
Принт» (г.Москва) и ФГУП «Красная звезда» (г. Москва). Важной частью
реализации выполненной работы является ее использование в учебном
процессе для повышения качества подготовки специалистов-инженеров. По
итогам научных исследований были подготовлены три учебных пособия,
написаны учебно-методические руководства по курсам «Технические средства
автоматизации и управления», «Технические средства автоматизации» и
«Системы автоматизации и управления», а также выполнен ряд магистерских
диссертаций и значительное число дипломных проектов.
Конкретное личное участие автора выразилось в научном обосновании
методологии исследования автоматизированных систем управления в рулонных
печатных машинах; в развитии их теории и проведении вычислительных
экспериментов. Основные положения диссертации опубликованы в 35
авторских публикациях, 14 научных трудов были подготовлены при ведущем
участии автора, а 4 публикации при равном участии авторов. В диссертацию
включены только те положения, которые принадлежат лично автору.
Степень обоснованности научных положений и выводов диссертации
основана на применении фундаментальных законов физики и методов
математического анализа, их непротиворечивости физическим предпосылкам и
качественном совпадении с результатами других исследований,
опубликованными в научной, технической и справочной литературе, а также
достаточно широкой публикацией результатов и их обсуждением на
конференциях.
Публикации. По теме диссертации автором самостоятельно и в
соавторстве опубликованы 53 научные работы, том числе 2 монографии:
«Динамические свойства процессов управления движением бумаги и краски в
рулонных печатных машинах» (М., 2003), «Теоретические основы и
математическое моделирование лентопроводных и краскопитающих устройств
рулонных печатных машин как объектов управления» (М, 2009) и 12 статей в
ведущих научных изданиях, в которых в полной мере отражено основное
содержание работы.
8
Апробация работы. Основные положения и результаты работы
докладывались на Всесоюзном совещании по методам расчета
полиграфических машин (Львов, 1991), 2-й Международной конференции
«Информационные технологии в печати» (Москва, 1995), 5-й и 6-й
Международных конференциях информатизации (Москва, 1998 и 1999 г.г.),
Международной научно-технической конференции «Управление в технических
системах» (Пенза, 2004), а также на конференциях профессорско-
преподавательского состава Московского государственного университета
печати. Результаты работы были обсуждены на совместном заседании
профилирующих кафедр Северо-Западного института печати Санкт-
Петербургского университета технологии и дизайна, где получили
положительную оценку.
Структура и объем работы. Диссертация состоит из введения, семи
глав, заключения и библиографического списка, включающего 144
наименований использованной литературы. Содержание диссертации изложено
на 313с. машинописного текста и включает 391 рисунок
СОДЕРЖАНИЕ РАБОТЫ
Во введении показана актуальность проблемы, научная новизна,
практическая значимость работы, а также приведены основные положения,
выносимые на защиту.
В первой главе проведен анализ достоинств и недостатков
существующих автоматизированных систем управления лентопитающими и
лентопроводящими устройствами РПМ, которые представляют собой сложные
технологические агрегаты, обеспечивающие изготовление многокрасочной
иллюстрированной продукции на непрерывно движущейся ленте.
Отечественные исследователи уделяли большое внимание проблемам
повышения качества рулонной печати. Здесь следует выделить
основополагающие труды В.Т.Бушунова, Б.В.Куликова, Л.В.Фельдмана,
Г.А.Алексеева. Значительный вклад в создание основ теории рулонного
печатного оборудования внес профессор В.П.Митрофанов, который положил
начало изучению процесса приводки красок на вязкоупругих материалах.
Среди работ по динамике рулонного печатного оборудования необходимо
9
также отметить таких ученых как А.А.Тюрин, Б.И.Климов, В.В.Казакевич,
Э.И.Избицкий, В.А.Перов и С.П.Вартанян и др. За рубежом вопросами
совершенствования систем управления лентопитающими и лентопродящими
устройствами занимаются как ведущие производители рулонных печатных
машин («Хейдельберг», «Манн Роланд», «Эрхард+Леймер»), так и
разработчики специализированных технических средств автоматизации и
управления («Монталво корпорейшн», «Уорнер Электрик», «КвадТек» и др.).
Среди зарубежных научных центров следует отметить Оклахомский
государственный университет (США), в стенах которого регулярно каждые два
года проводятся международные конференции по динамике лентопитающих
устройств, а также исследовательскую лабораторию «Метсо пейпа
корпорейшн» (Финляндия), занимающуюся изучением вопросов обработки
рулонных материалов, как в бумагоделательной промышленности, так и в
полиграфическом производстве. Здесь следует выделить работы таких ученых
как Б. Балтер, К. Лин, У. Волферман, Ф. Парант, Г. Линна, М. Парола и др.
Важным направлением совершенствования качества функционирования
рулонной офсетной техники является оптимизация условий процесса печати,
при которых обеспечивается минимум градационных искажений в светлых и
темных тонах. В работах Э.И.Избицкого, С.П.Вартаняна и Л.А.Шахмундеса
приведены результаты экспериментальных исследований, которые показали
наличие экстремальных зависимостей оптической плотности оттисков от
количества подаваемой влаги. Показатель качества печатного процесса
формируется с помощью двух датчиков, которые измеряют оптическую
плотность оттиском при полном (100%-ном) и частичном (80%-ном)
заполнении растровых полей на контрольных метках.
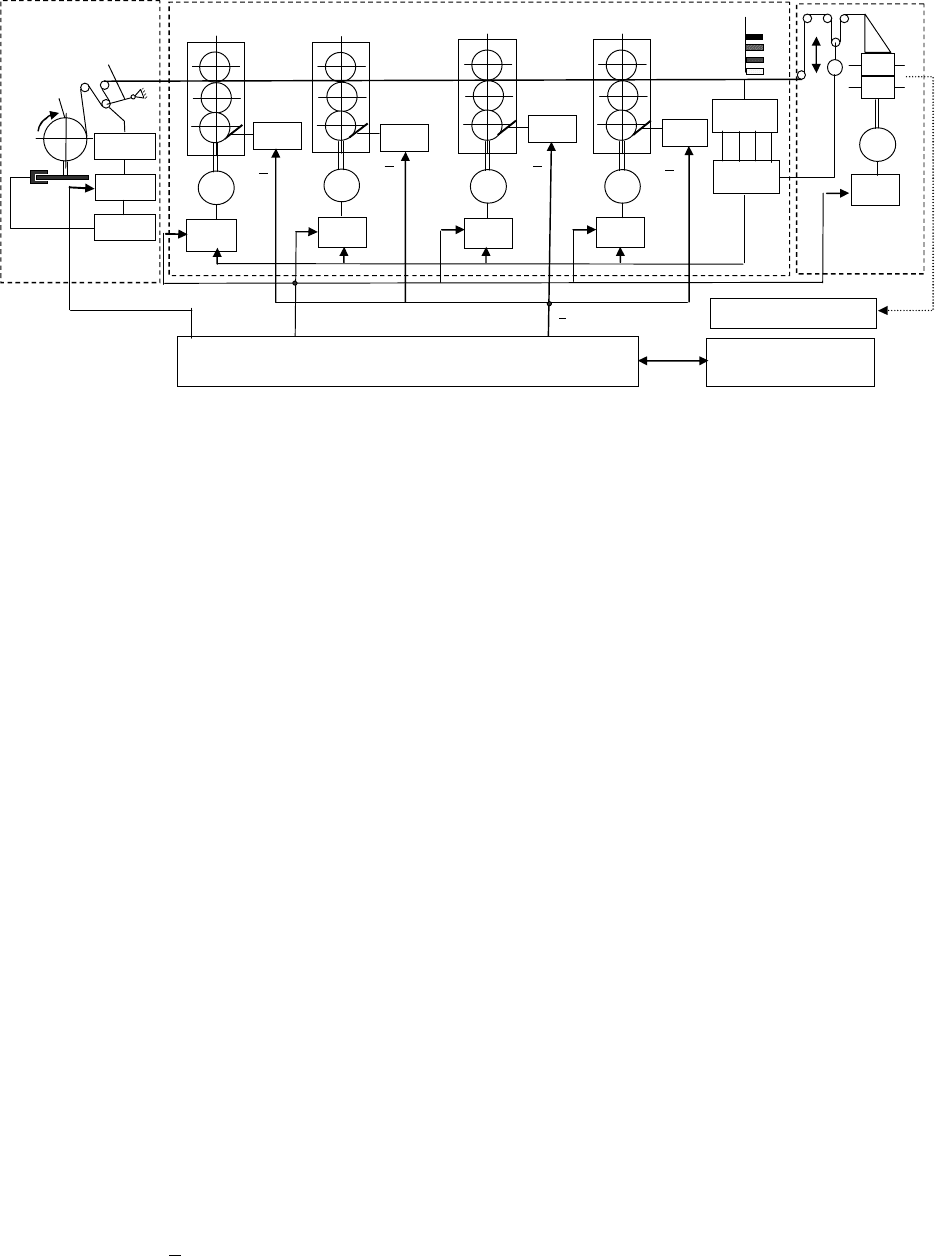
На рис.1 представлена схема многокрасочной офсетной рулонной
печатной машины, содержащая лентопитающее устройство (ЛПУ),
лентопроводящую систему (ЛПС) и приемно-фальцевальное устройство (ПФУ).
ЛПУ включает рулон, амортизатор, датчик натяжения ленты (ДНЛ),
специализированный контроллер натяжения (СКН), блок управления рулонным
тормозом (БУРТ) и рулонный тормоз (РТ) осевого типа. Входными
параметрами ЛПУ выступают заданное значение силы натяжения ленты
*
0
F и
10
линейная скорость движения бумаги в первой бумаговедущей паре
1
V . ЛПС
состоит из четырех печатных секций (ПС
1
-ПС
4
), с помощью которых
осуществляется последовательное запечатывание оттисков.
ДНЛ
СКН
БУРТ
РТ
ЛПУ
ПС
1
Д
1
ЭП
1
ПС
2
Д
2
ЭП
2
ПС
3
Д
3
ЭП
3
ПС2
Д
4
ЭП
4
КА
1
1
h
КА
2
2
h
КА
3
3
h
*
F
КА
4
Пульт центрального управления
ИРП
4
h
СК
П
Спектрофотометр
Д
5
ЭП
5
ЛПС
Пробный оттиск
1
V
2
V
3
V
4
V
)5,...,2,1i(,tV
i
)4,...,2,1i(,th
i
tF
*
0
F
4
L
T
M
1
2
3
4
ПФУ
ts
21
ts
32
ts
43
ts
ij
Рулон
Амортизатор
Рис.1. Схема многокрасочной офсетной рулонной печатной машины
Управление вращательным движением формного, офсетного и
печатного цилиндров осуществляется системой распределенных
электроприводов (ЭП
1
-ЭП
4
), которые обеспечивают заданную линейную
скорость проводки бумаги (
*
4
*
2
*
1
V...VV ) и коррекцию начальной фазы
формных цилиндров либо по команде оператора, либо за счет работы системы
автоматической коррекции приводки. Данная система включает измеритель
рассогласования приводки (ИРП), построенный на основе сканирующей ПЗС-
камеры, и специализированный контроллер приводки (СКП), который
обеспечивает формирование цифровых управляющих сигналов:
1
,
2
,
3
и
4
. Здесь: j=1,2,3,4– номер базовой метки, i≠j – номер метки контролируемой
секции, символ «0» означает, что измерение всех отклонений производится на
одном общем оттиске. ПФУ содержит контур начального позиционирования
бумажного полотна по линии первого фальца за счет перестановки
регистрового валика
4
L . Управление вращательным движением этого узла
РПМ обеспечивается автономным электрическим приводом ЭП
5
. Текущее
качество оттиском контролируется с помощью спектрофотометрической
измерительной системы, которая корректирует сигналы общей и местной
подачи краски
i
h (
i
1,2,34) для всех печатных секций.