Щербина Ю.В. Автореферат - Методология исследования и проектирования автоматизированных систем управления в рулонных печатных машинах
Подождите немного. Документ загружается.

11
Исходные уравнения системы управления натяжением ленты имеют вид:
T0бpp
M,rREb,rR/VJ
dt
d
(1)
22
1
4
p
/e12/bJ
(2)
cosre2er,rR
1
2
1
2
(3)
)2cos(e2e/e,r
2
2
2
22
2
2
(4)
/Vdt/d
p
(5)
r/Vdt/d
p
(6)
dt/dl2VtVVdt/dL
ap10p00
(7)
0aaa
22
a
kdt/dT2dt/dT (8)
tkdt/dM
зд0ocT
(9)
Здесь (1) – уравнение динамики рулона; (2) – уравнение момента
инерции рулона при наличии эксцентриситета
1
e ; (3) – уравнение радиуса
вращения рулона с эксцентриситетом
1
e ; (4) - уравнение радиуса вращения с
овальностью
2
e ; (5) – уравнение изменения радиуса размотки; (6) - уравнение
изменения угла вращения рулона; (7) – уравнение динамики натяжения ленты
на участке размотки рулона; (8) – уравнение динамики амортизатора; (9) -
уравнение астатического управляющего устройства. Входными воздействиями
являются сигналы
tV
1
и
t
зд
, а выходными переменными – сигналы
p
V ,
0
,
и
T
M . Источниками низкочастотных возмущений выступают: овальность
1
e
и эксцентриситет
2
e рулона. Параметрами настройки ЛПУ являются:
постоянная времени
a
T и степень демпфирования
a
амортизатора, а также
коэффициент передачи
oc
k корректирующего устройства. Выделены три
основных типа ЛПУ: с тензодатчиком и пружинно-масляным амортизатором; с
датчиком поворота штанги пружинно-масляного амортизатора; с датчиком
поворота свободно плавающего амортизатора.
Во второй главе выполнен динамический и частотный анализ
автоматизированных систем управления натяжением ленты с идеальным
рулоном. Для этого на основе метода замороженных передаточных функций
«стационаризация» уравнений рулона и ленты в малых отклонениях от
12
номинального режима (в предположении, что за время переходных процессов
«замороженное» значение радиуса рулона
меняется несущественно). Эти
уравнения имеют вид:
TM0ppp
MkkVdt/VdT
(10)
dt/dkl2VVkdt/dT
Lap1V00л
(11)
Здесь:
*
p
2
p
V3/T - постоянная времени рулона;
*
pб
V3/E2k
-
коэффициент передачи рулона по относительному удлинению ленты; -
*
pM
Vb3/2k - коэффициент передачи рулона по тормозному моменту;
*
p0л
V/LT - постоянная времени ленты;
*
p
*
0LV
V/1kk -
коэффициенты передачи по скорости движения и изменению длины пути
ленты;
a
l - длина штанги амортизатора.
Показано, что в ЛПУ, которое не содержит амортизатор, возникают
слабозатухающие колебаний натяжения ленты, частота которых
kp
определяется отношением критической скорости печати
0бkp
L/E2V к
текущему радиусу
рулона. Так как критическая скорость печати
kp
V не
зависит от радиуса рулона
, то печатная машина будет работать в режиме
критических колебаний при любом радиусе, если текущая скорость печати
равна критической.
дБ,L
раз
0
c
k
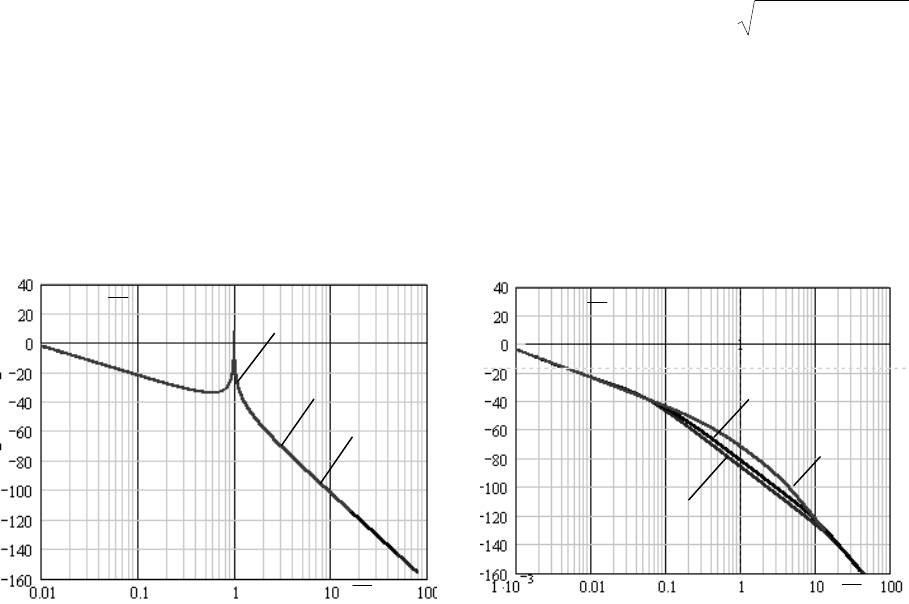
Рис.2. Параметрические ЛАЧХ системы
управления натяжением ленты без
амортизатора при различных радиусах
рулона
0
k
c
дБ ,L
раз
Рис.3. Параметрические ЛАЧХ
системы управления натяжением
ленты с амортизатором при 20
a
13
На рис.2 представлены параметрические логарифмические амплитудно-
частотные характеристики (ЛАЧХ) простейшего ЛПУ в относительных
частотах
kp
/
при трех радиусах рулона: начальном 5,0
0
м, среднем
3,0
c
м и конечном
k
0,1м. Видно, что все три характеристики в
относительных координатах одинаковы и совмещаются друг с другом. При
этом колебательные пики приходятся на относительную частоту равную
единице, т.е.
1
. Предложено обеспечивать настройку пружинно-масляного
амортизатора исходя из условий:
kp0a
V/T
и
a
20. Такая настройка
обеспечивает эффективное подавление критических колебаний и быстрое
установление переходных процессов.
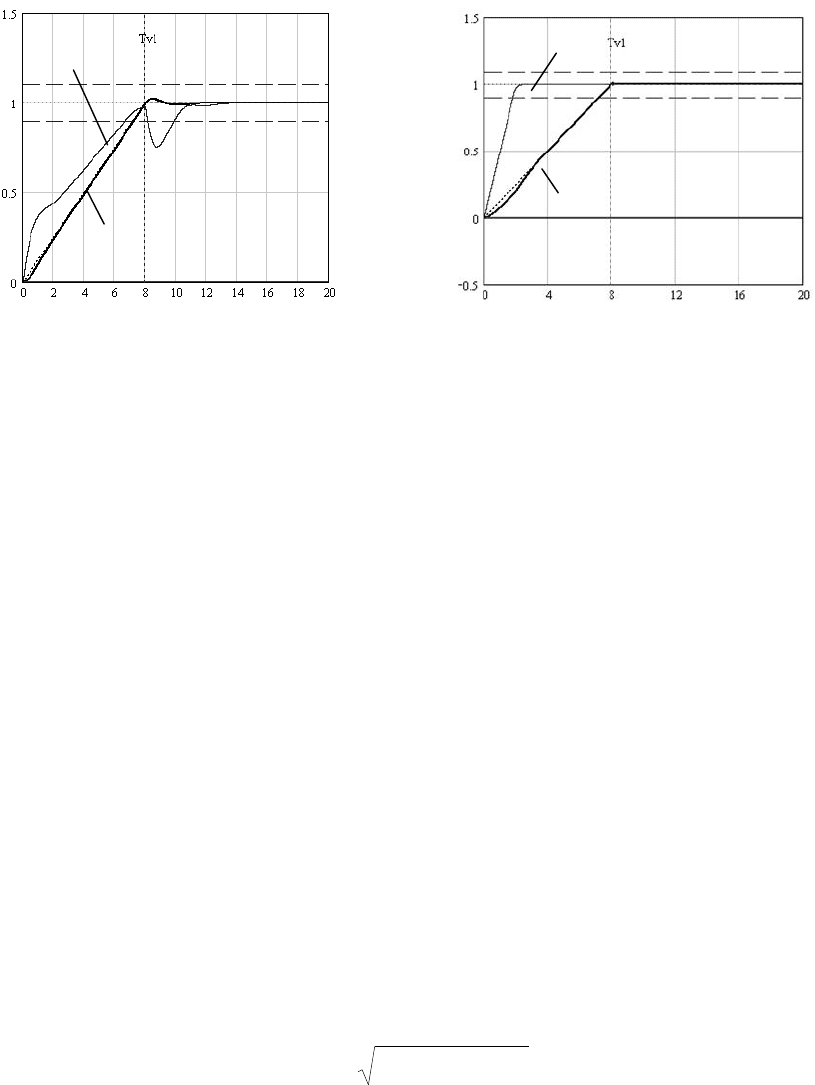
На рис.3 показаны ЛАЧХ системы управления натяжением ленты с
пружинно-масляным амортизатором при выбранной настройке. Видно, что в
данном случае колебательные пики достаточно сглажены.
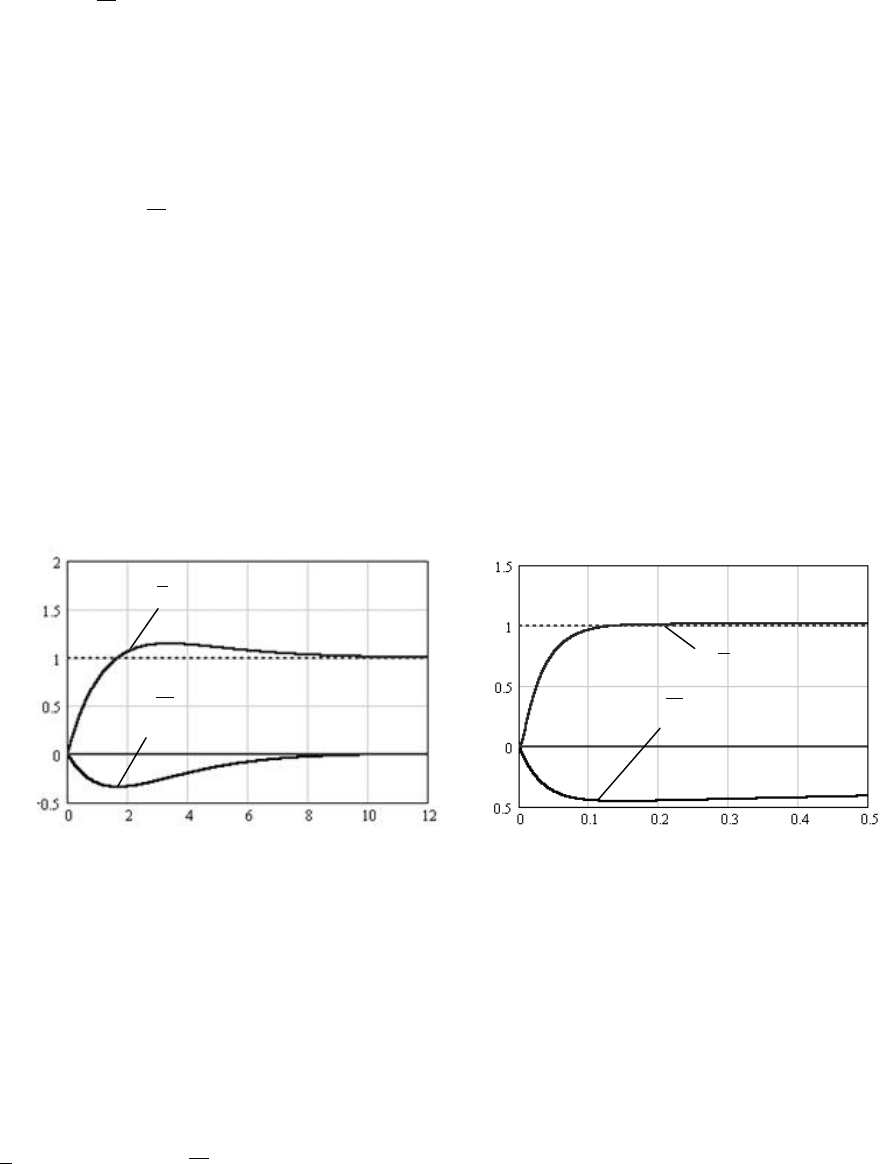
На рис. 4 и 5 представлены динамические характеристики подсистемы
«рулон-лента-амортизатор» без управляющего устройства при номинальном
значении тормозного момента и выбранной настройке амортизатора. Здесь
чертой обозначены относительные значения выходных параметров ЛПУ:
*
000
/ ,
*
ppp
V/VV , где
*
0
и
*
p
V - соответственно номинальные
значения относительного удлинения ленты и скорости печати. Динамические
свойства системы управления натяжением существенно зависят способа
tV
p
t
0
c
,
t
Рис. 5. Динамические характеристики
системы «рулон-лента-амортизатор»
при конечном радиусе рулона
k
t
0
tV
p
c
,
t
Рис. 4. Динамические характеристики
системы «рулон–лента-амортизатор»
при полном радиусе рулона
0
14
формирования сигнала управления. Для системы с тензодатчиком передаточная
функция цепи обратной связи имеет следующий вид:
*
0
0
*
Toc
oc
M
p
k
pW , (12)
а для системы с датчиком перемещения штанги амортизатора - вид:
1pT2pT
kM
p
k
pW
aa
22
a
a
*
0
*
Toc
oc
, (13)
где
*
- номинальное значение угла поворота амортизатора.
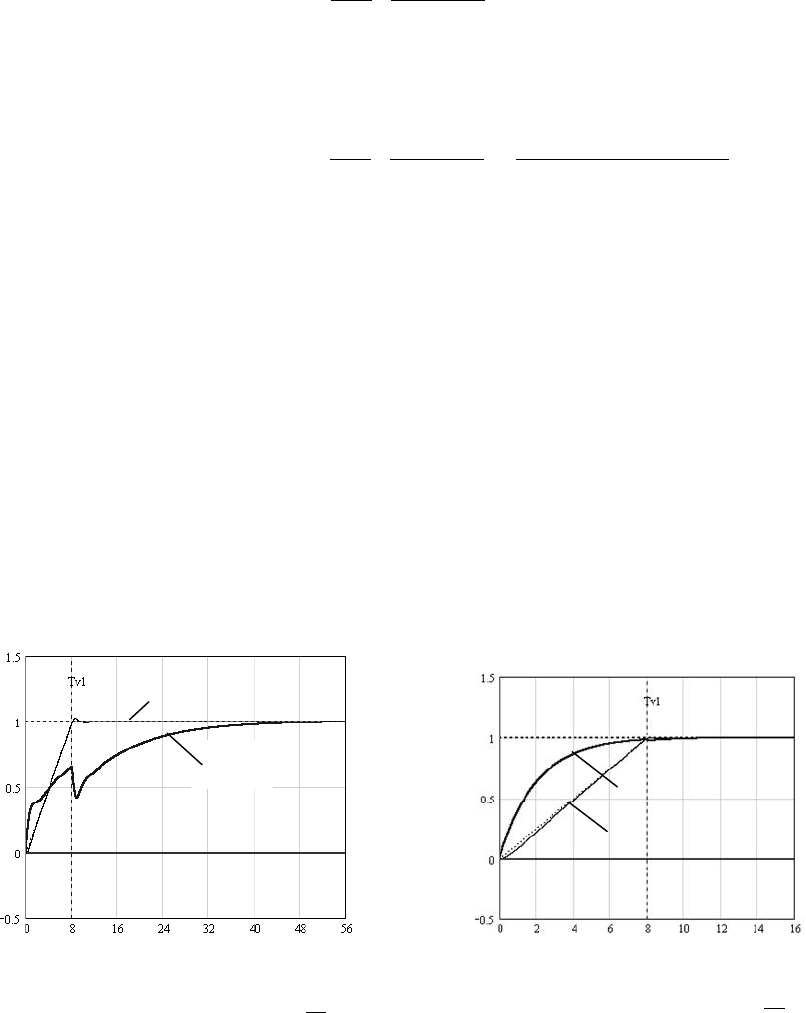
На рис. 6 и 7 представлены динамические характеристики системы
управления натяжением с тензодатчиком при
1
oc
c1,0k
и линейном
изменении скорости первой бумаговедущей пары. Видно, что время
установления переходных процессов в данном случае существенно зависит от
радиуса рулона. При полном радиусе
0
0,5м оно составляет примерно 40с, а
при конечном радиусе
k
0,1м – 8с. Форма всех переходных характеристик –
апериодическая.
Качество поддержания заданного уровня натяжения может быть повышено за
счет применения нелинейных устройств, ограничивающих величину
корректирующего сигнала при больших рассогласованиях. В области больших
отклонений такое устройство воздействует на ЛПУ с наибольшей скоростью,
Рис.6 . Динамические характеристики
системы управления натяжением при
линейном изменении скорости )t(V
1
и
полном радиусе рулона
0
ty
0
ty
1
c
,
t
Рис.7. Динамические характеристики
системы управления натяжением при
линейном изменении скорости )t(V
1
и
конечном радиусе рулона
c
ty
0
ty
1
c
,
t
15
ускоряя процесс корректировки натяжения. На рисунках 8 и 9 представлены
автоматизированной системы управления натяжением с 20%-ной зоной
насыщения при линейном законе изменения скорости первой бумаговедущей
пары. Сравнение этих графиков с аналогичными графиками, изображенными на
рис.6 и рис.7 позволяет сделать вывод, что использование нелинейного
управляющего устройства позволяет уменьшить время установления
переходных процессов примерно в 4 раза при всех радиусах рулона.
Для систем управления натяжением со свободно плавающим валиком
уравнение амортизатора имеет вид:
зд01
22
2
dt/dadt/da (14)
где
вбa2
lEb2/Ja
,
вб
2
гд1
lEb2/lka - коэффициенты передачи, зависящие
механических параметров и коэффициента демпфирования амортизатора.
Для данного амортизатора критическая скорость печати
kp
V также
соответствует максимуму колебательных процессов в лентопитающем
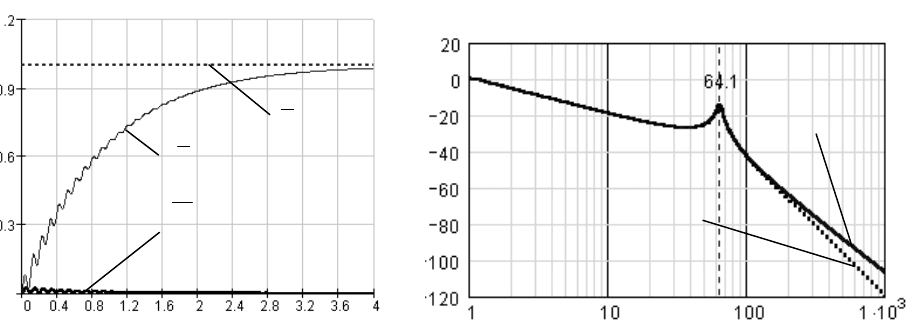
устройстве. На рис.10 представлены динамические характеристики ЛПУ при
конечном радиусе рулона. Видно, что при ступенчатом изменении заданного
натяжения в устройстве возникают высокочастотные колебания натяжения,
частота которых рассчитывается по формуле:
лpVk,kp
TT/kk
(15)
Рис. 8. Динамические характеристики
системы управления натяжением с
нелинейным регулятором при начальном
радиусе рулона
0
ty
0
ty
1
Рис.9. Динамические характеристики
системы управления натяжением с
нелинейным регулятором при среднем
радиусе рулона
c
ty
1
ty
0
c
,
t
c
,
t
16
На рис.11 представлены графики упрощенной
упр
раз
L и полной
раз
L
ЛАЧХ разомкнутой системой управления натяжением. Видно, что значение
максимума колебательных свойств соответствует частоте 64,1рад/с, а
расхождение между упрощенной и полной ЛАЧХ начинается после частоты
200рад/с.
В третьей главе исследованы вынужденные колебания в системе
управления натяжением ленты, которые обусловлены эксцентриситетом
1
e или
овальностью
2
e рулона, а также действием гармонических изменений скорости
разматывания рулона и тормозного момента:
)t2cos(e)t(V
p2pe
1
(16)
)tcos(e)t(V
p1pe
2
(17)
)tcos(egm)t(M
p1pe
1
(18)
Здесь: bm
2
p
- текущее значение массы рулона,
g
- ускорение
свободного падения. Знак «минус» в формулах (16) и (17) показывает, что
увеличение скорости разматывания рулона приводит к уменьшению силы
натяжения ленты. Возмущение )t(M
1
e
является динамическим, поскольку его
амплитуда зависит от массы рулона, а возмущения )t(V
1
e
и )t(V
2
e
являются
кинематическими, так как их амплитуда зависит от угловой скорости
)t(
зд
)t(
0
)t(V
p
Рис.10. Динамические характеристики
системы управления натяжением при
ступенчатом изменении заданного
натяжения при конечном радиусе
рулона
k
Рис.11. Упрощенная и точная
параметрические ЛАЧХ разомкнутой
системы управления натяжением при
конечном радиусе рулона
k
.
c
,
t
раз
L
упр
раз
L
рад/с
,

17
разматывания рулона. Установившиеся реакции лентопитающего устройства
под действием гармонических возмущений по скоростям размотки
tV
1
e
и
tV
2
e
рулона, а также по тормозному моменту
tM
2
e
имеют вид:
)))(tcos()(A)t(
pVppV
уст
V0
0
1
e
1
e0
e
(19)
)))2(t2cos()2(A)t(
pVppV
уст
V0
0
2
e
2
e0
2
e
(20)
)))(tcos()(A)t(
pMppM
уст
M0
0
2
e
2
e0
2
e
(21)
Здесь:
)(A
pM
0
2
e
2ppM
em)(W
0
2
e
- амплитуда установившейся
реакции ЛПУ на гармоническое изменение тормозного момента вследствие
наличия эксцентриситета
2
e рулона, а
2ppVpV
e2)2(W)2(A
0
2
e0
2
e
и
-
1ppVpV
e)(W)(A
0
1
e0
1
e
амплитуды установившихся реакций на
гармоническое изменение скорости разматывания рулона вследствие его
овальности
1
e и эксцентриситета
2
e . Система уравнений (22) описывает
линеаризованную математическую модель системы управления натяжением с
датчиком положения пружинно-масляного амортизатора, учитывающую
эксцентриситет рулона.
tMMkkVdt/VdT
1
eTM0ppp
dt/dl2tVVtVkdt/dT
aep1V00Л
1
(22)
0a1
22
2
kdt/dadt/da
зд
*
0
*
TocT
/Mkdt/Md
Общая реакция лентопитающего устройства на действие двух
гармонических составляющих может быть определена по следующей формуле:
))(t
V
(j
V
))(t
V
(j
M
уст
0
0e
V
*
p
0e
0e
M
*
p
0e
e)(Ae)(ARe)t(
(23)
На рис.12 изображено семейство графиков, характеризующих зависимость
относительной амплитуды установившихся колебаний
уст
A
в
автоматизированной системе управления натяжением с тензодатчиком от
18
скорости печати
p
V при различных значениях радиуса рулона: начальном
0
0,5м (кривая 1), среднем
c
0,275м (кривая 2), конечном
k
0,05м
(кривая 3). Видно, что при увеличении коэффициента передачи управляющего
устройства
И
K , в 3 раза увеличивается относительная амплитуда
установившихся колебаний при начальном радиусе рулона.
На рис.13 представлены графики относительных амплитуд
установившихся вынужденных колебаний
*устуст
/AA
от радиуса
рулона
в системе с тензодатчиком при наличии эксцентриситета 005,0e
1
м
и различных значениях скорости печати: малой 2V
1
м/с (кривая 1), средней
4V
2
м/с (кривая 2) и высокой 8V
3
м/с (кривая 3).
Системы управления натяжением с тензодатчиком и датчиком
положения амортизатора имеют практически одинаковые свойства по
отношению к низкочастотным воздействиям, поскольку их установившиеся
амплитуды различаются не более чем на (1-4) процента. Разница в динамике
этих систем состоит в том, что системы управления с тензодатчиком являются
более быстродействующими из-за того, что их цепь обратной связи по
стабилизации натяжения не содержит амортизатор, инерционные свойства
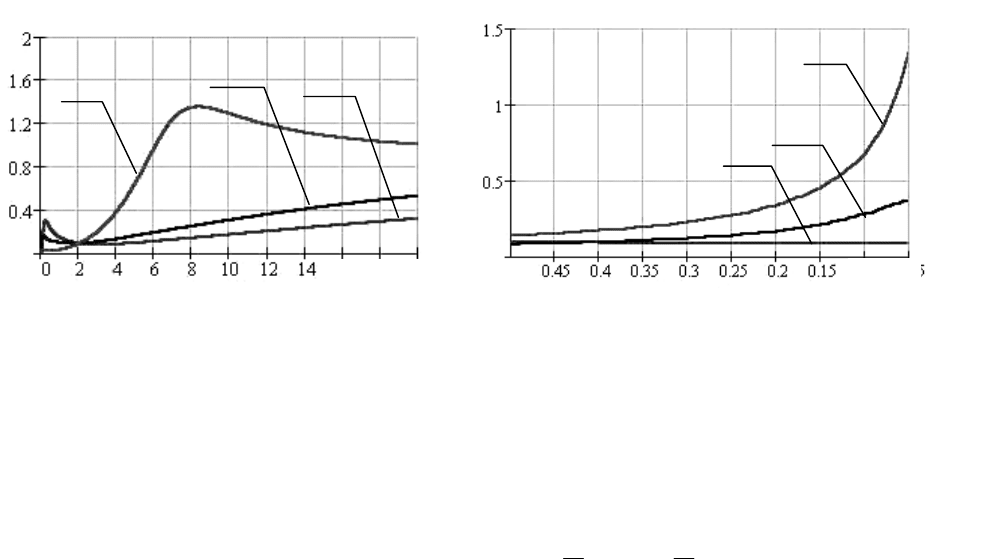
которого весьма существенны. На рис.14 представлен график зависимости
относительной амплитуды суммарных установившихся колебаний натяжения
Рис.12. Зависимости относительной
амплитуды установившихся колебаний
натяжения ленты от скорости печати
p
V в системе с тензодатчиком при
различных значениях радиуса рулона
3
1
2
*
0
уст
/A
1
3
м
,
Рис. 13. Зависимости относительной
амплитуды установившихся колебаний
натяжения ленты от радиуса рулона
в системе с тензодатчиком при
различных значениях скорости печати
1
V
*
0
уст
/A
с/м,V
p
19
*
0ee
/AA
11
от скорости печати
p
V при начальном
0
=0,5м, среднем
c
=0,3м
и конечном
k
=0,1м значениях радиуса рулона. Мы видим, что при низких
p
V 5м/с и высоких 9V
p
м/с скоростях печати, амплитуда установившихся
колебаний натяжения практически не зависит от изменения радиуса
рулона.
Однако в среднем диапазоне скоростей ЛПУ проявляет колебательные
свойства, которые возрастают с уменьшением радиуса
рулона. Критическая
скорость печати при
k
составляет
kp
p
V =6,45м/с. Это значение
соответствует угловой скорости вращения рулона
k
kp
p
kp
k
/V =64,5 рад/с. При
срабатывании рулона (см. рис.15) характер изменения амплитуды
вынужденных колебания зависит от скорости печати. При малой скорости
печати (2м/с) амплитуда вынужденных колебаний несколько убывает, при
средней скорости (4м/с) остается примерно постоянной, а при большой
скорости печати (8м/с) существенно возрастает.
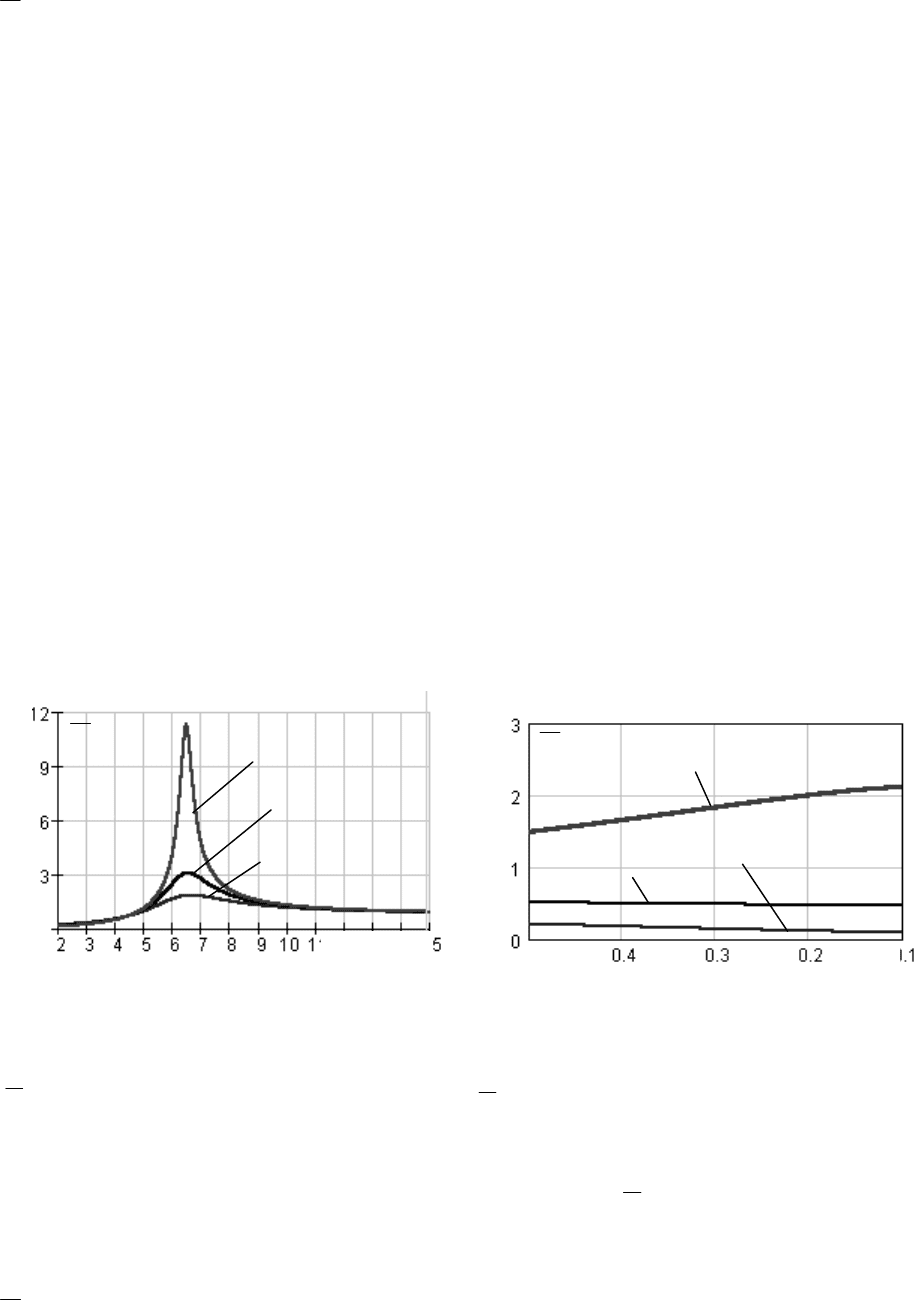
На рис.16 представлены графики зависимостей относительной
амплитуды вынужденных колебаний натяжения
*
0ееее
/AA
2121
от скорости
печати
p
V . Мы видим, что при начальном радиусе рулона
0
зависимость
pee
VA
21
является гладкой и плавно возрастает от нулевого значения до 1,5 во
всем рассматриваемом диапазоне скоростей печати
p
V (от нуля до 16 м/с). При
1
A
с/м,V
p
1
A
м
,
с/м8V
*
p
с/м4V
*
p
с/м2V
*
p
k
c
0
Рис.14. Зависимость относительной
амплитуды суммарных
установившихся колебаний натяжения
1
A
от скорости печати
p
V
Рис.15. Зависимость относительной
амплитуды суммарных
установившихся колебаний натяжения
1
A
от радиуса рулона
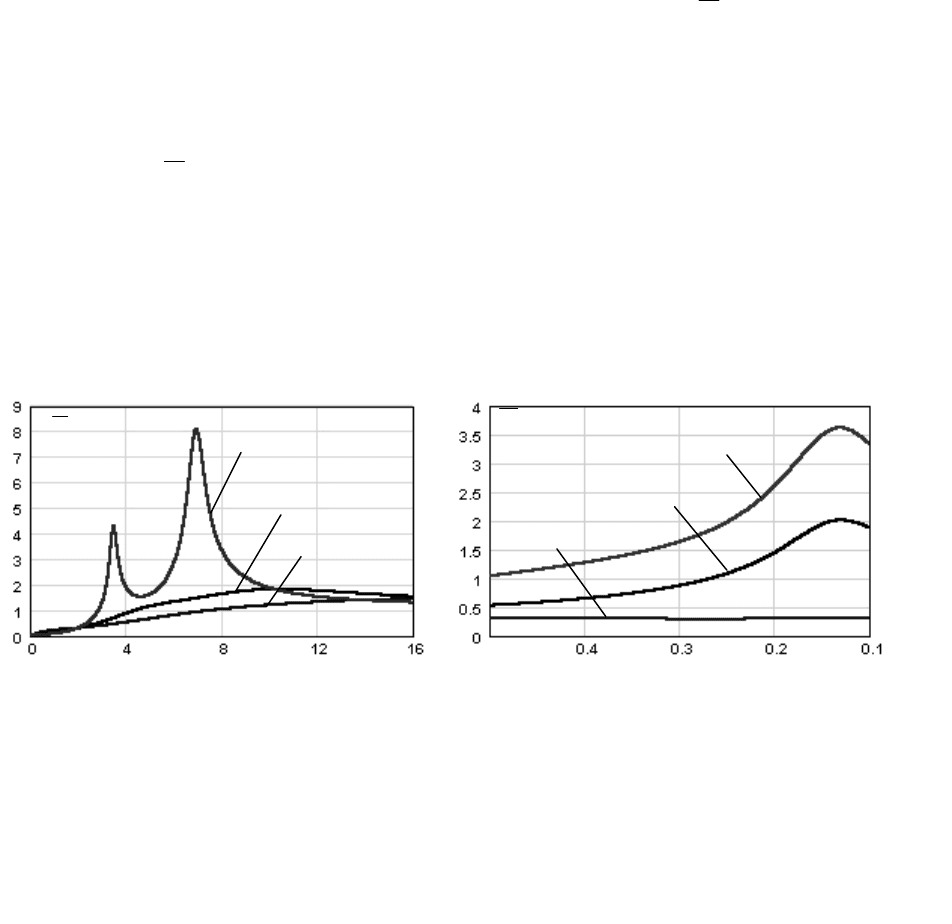
20
среднем радиусе рулона
c
график зависимости
pee
VA
21
принимает
максимальное значение (примерно равное двум), когда скорость печати
p
V
составляет около 10м/с. При достижении конечного радиуса
k
на графике
зависимости
pee
VA
21
отчетливо выражены два резонансных пика: большой –
при скорости печати
рез
1p
V
7,2м/с, и малый – при
рез
2p
V
3,6м/с. Очевидно, что
большой пик объясняется наличием эксцентриситета рулона
1
е
=0,005м, а
малый – наличием его овальности
2
е
=0,005м.
Характер поведения полученных графиков показывает, что процессы
разгона печатной машины при разных радиусах рулона будут иметь различный
характер. При начальном радиусе рулона
0
разгон печатной машины должен
характеризоваться монотонным увеличением амплитуды вынужденных
колебаний. При среднем значении радиуса рулона
c
амплитуда вынужденных
колебаний должна сначала монотонно возрастать, а затем плавно уменьшаться.
При конечном радиусе
k
должны быть выражены два резонансных пика:
малый – обусловленный наличием овальности
2
е , и большой – обусловленный
наличием эксцентриситета
1
е рулона. На рис.17 представлены графики
зависимостей суммарной относительной амплитуды вынужденных колебаний
Рис.17. Зависимость относительной
амплитуды установившихся колебаний
натяжения при наличии эксцентриситета
1
e =0,005м и овальности
2
e =0,005м от
радиуса рулона
при различных значениях
скорости печати
p
V
Рис.16. Зависимость относительной
амплитуды установившихся колебаний
натяжения при наличии
эксцентриситета
1
e =0,005м и
овальности
2
e =0,005м от скорости
печати
p
V при различных значениях
радиуса рулона
21
ее
A
м/с,p
V
м
,
0,5м
0
0,3м
c
0,1м
k
21
ее
A
с/м8V
*
p
с/м4V
*
p
с/м2V
*
p