Щербина Ю.В. Автореферат - Методология исследования и проектирования автоматизированных систем управления в рулонных печатных машинах
Подождите немного. Документ загружается.

21
21
ee
A от радиуса рулона
при трех значениях скорости печати
p
V : малой –
2м/с; средней – 4м/с и большой – 8 м/с. Видно, что при малой скорости печати
2м/с, амплитуда вынужденных колебаний остается практически постоянной.
При средней скорости печати 4м/с амплитуда вынужденных колебаний
21
ее
A
сначала существенно возрастает почти в 4 раза, затем при
0,13м
несколько убывает. При большой скорости печати 8 м/с характер зависимости
21
ее
A
не меняется. Однако амплитуда установившихся колебаний в этом
случае возрастает по сравнению со средней скоростью печати почти в 2 раза.
График суммарных установившихся колебаний рассчитывается по следующей
формуле:
,V
tV
j
pMee
,V
tV
j
pVe
e
уст
0
p
T
M
1
e
p
T11
p
p
V
1
e
p
p1
1
e,VAke,VAkRet
2
ep
p
V
2
e
p
p22
,V
tV2
j
pVee
e,VAk
(24)
где
1
e
k
=1 или 0 – коэффициент наличия эксцентриситета;
2
e
k
=1 или 0 –
коэффициент наличия овальности.
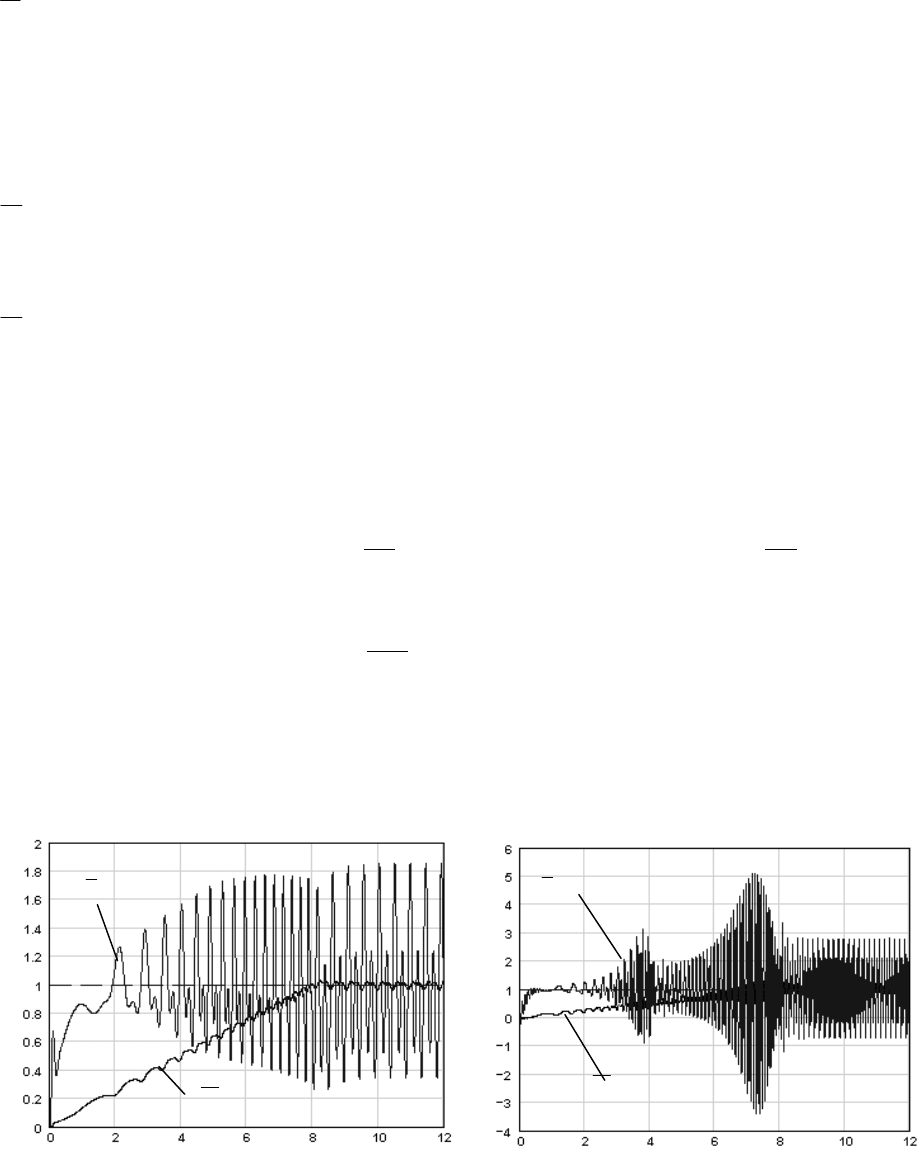
Рис.18. Динамическая характеристика
системы управления натяжением при
линейном изменении скорости первой
бумаговедущей пары до
p
V 4м/с,
эксцентриситете
1
e 0,005м, овальности
2
e =0,005м и среднем радиусе рулона
c
0,3м
Рис.19. Динамическая характеристика
системы управления натяжением при
линейном изменении скорости первой
бумаговедущей пары до
p
V 4м/с,
эксцентриситете
1
e 0,005м, овальности
2
e =0,005м и конечном радиусе рулона
k
0,1м
t
0
tV
p
c
t,
c
t,
t
0
tV
p

22
На рис. 18 и рис. 19 представлены графики динамических характеристик
системы управления натяжением со свободно плавающим валиком при
линейном изменении скорости первой бумаговедущей пары до 4м/с. Видно, что
при среднем радиусе рулона
c
амплитуда вынужденных колебаний сначала
нарастает до
t
=7с, а затем несколько уменьшается. Процесс разгона при этом
завершается примерно за 10с. При конечном радиусе рулона
k
присутствуют
два ясно выраженных резонансных пика. Максимум первого пика достигается
при
1
t 3,7с, а его величина составляет около 3. Причиной появления первого
пика является наличие овальности
2
е . После его прохождения амплитуда
вынужденных колебаний уменьшается примерно до единицы. Второй
резонансный пик свидетельствует о наличии эксцентриситета
1
е . Его максимум
примерно равен 4 и наблюдается при
2
t 7,2с. Следует отметить, что
полученные резонансные пики соответствуют угловой частоте возмущающих
колебаний примерно 72рад/с., которая соответствует резонансной частоте
лентопитающего устройства.
В четвертой главе представлены результаты численного исследования
системы управления натяжением со свободно плавающим валиком. Расчеты
проводились с помощью интегрированной вычислительной системы MathCAD.
При проведении расчетов уравнение рулона (1) было модифицировано для
четырех вариантов исследования. В первом случае рассматривались
характеристики при отсутствии внешних возмущений, и динамика рулона
описывалась двумя уравнениями:
T
0б
2
p
p
2
M
EbV
4
b3
dt
dV
2
b
(25)
2
V
dt
d
p
(26)
Были рассчитаны динамические характеристики системы управления
натяжением при трех вариантах разгона рулонной печатной машины:
линейном, параболическом и косинусном. Наилучшим с точки зрения
уменьшения максимальных динамических отклонений натяжения оказался
23
косинусный закон, который обеспечивает изменение скорости печати
tV
1
при
отсутствии разрывов по скорости и ускорению. Во втором случае
исследовались динамические характеристики при наличии овальности. Здесь
динамические свойства рулона с эллиптической формой поперечного сечения
описывались следующей системой уравнений:
,r,,,,VV
dt
dV
0pe
p
1
p
V
2dt
d
,r,,Vr
dt
dr
pe
1
r
V
dt
d
p
(27)
где
,r,,,,VV
0pe
1
и
,r,,Vr
pe
1
- вспомогательные функции, которые
характеризуют изменение скорости печати dt/dV
p
и радиуса вращения
dt
/
dr
,
которые были получены с помощью зависимостей (1)-(4).
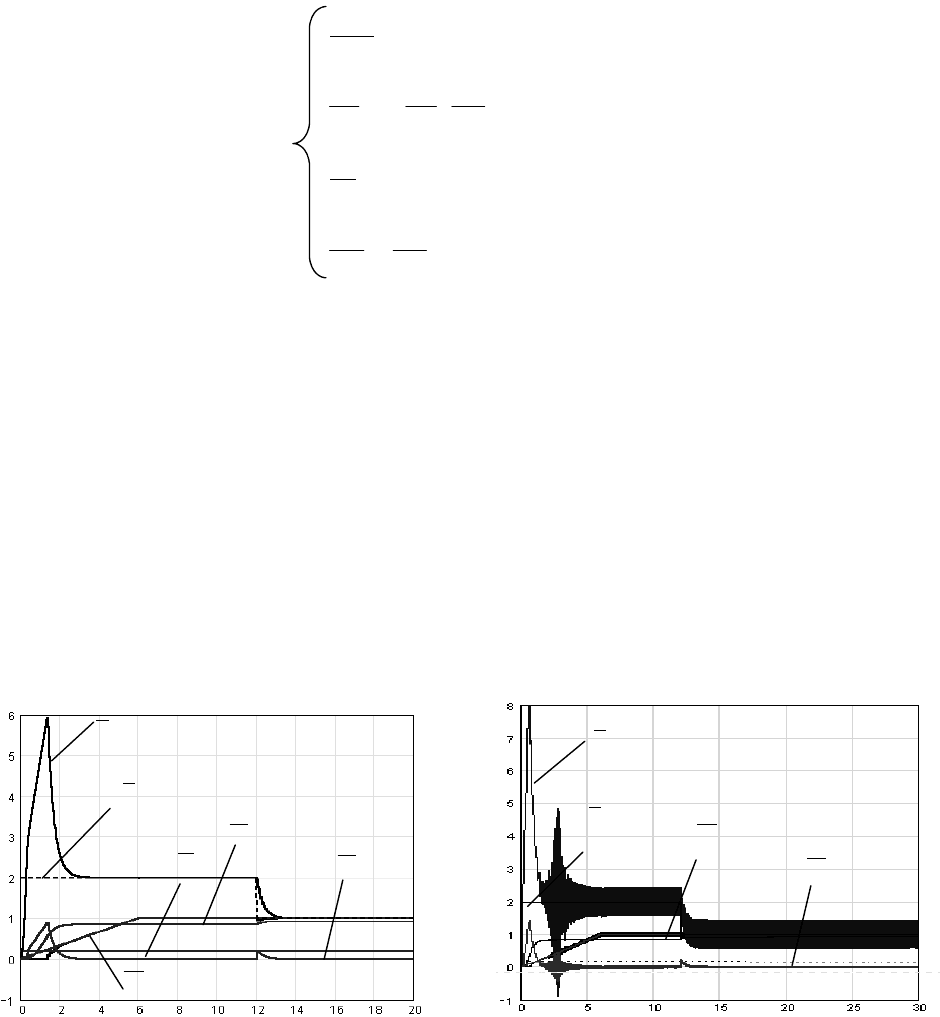
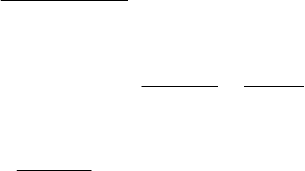
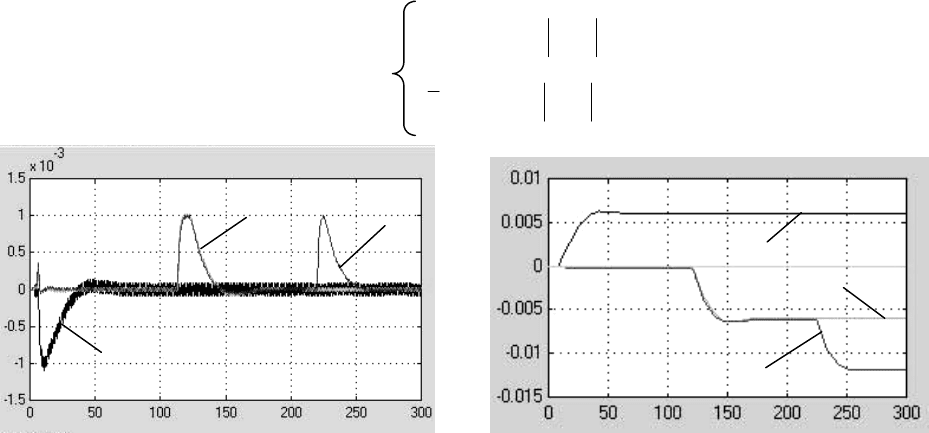
На рис.20 представлены динамические характеристики системы
управления со свободно плавающим валиком при отсутствии внешних
возмущений, а на рис.21 при скорости печати 8V
1
м/с, наличии овальности
005,0e
1
м и конечном радиусе рулона
k
0,1м.
0
)t(
зд
1
V
dt
/
d
c
,
t
0
)t(
зд
1
V
c
,
t
dt
/
d
Рис.20. Динамические характеристики
системы управления натяжением с
линейным законом разгона при конечном
k
0,1 м радиусе рулона и отсутствии
возмущений
Рис.21. Динамические характеристики
системы управления натяжением с
линейным законом разгона при конечном
k
0,1 м радиусе рулона и наличии
овальности
e
24
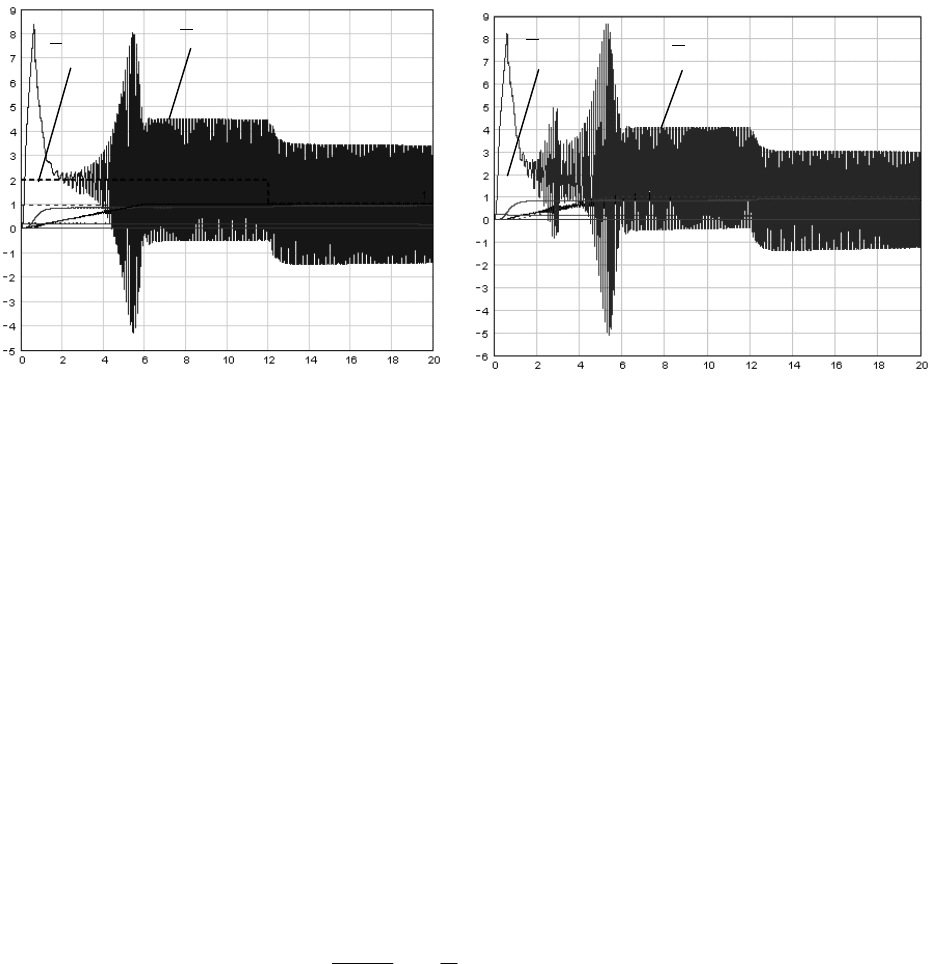
При наличии эксцентриситета использовались вспомогательные
функции
,r,,,,VV
0pe
2
и
,r,,Vr
pe
2
, которые аналогичны функциям
,r,,,,VV
0pe
1
и
,r,,Vr
pe
1
. На рис.22 представлены динамические
характеристики системы управления натяжением при наличии эксцентриситета
2
e 0,005м и тех же параметрах настройки. Видно, что в этом случае
резонансный пик возникает, когда скорость печати совпадает с ее критическим
значением. При этом амплитуда установившихся колебаний достигает двух
номинальных значений силы натяжения ленты.
Совместное влияние овальности и эксцентриситета показано на
динамической характеристике, представленной на рис.23. Видно, что в этом
случае присутствуют два резонансных пика, первый – вследствие овальности
1
e , а второй - вследствие эксцентриситета
2
e .
В пятой главе изложены теоретические основы, а также приведены
результаты динамического и частотного анализа процесса приводки красок в
многокрасочных РПМ. Предложено интегральное уравнение приводки:
)t(s)Tt()t(
2
d
dt
t
i
t-T
+ε1
i
V
)
i
ε1()t(
i
L
,i1i+ii1+i
1i-
, (28)
c
,
t
Рис.22. Динамические характеристики
системы управления натяжением с
линейным законом разгона при конечном
радиусе рулона и наличии
эксцентриситета
2
e
0
)t(
зд
Рис.23. Динамические характеристики
системы управления натяжением с
линейным законом разгона при конечном
радиусе рулона, наличии овальности
1
e и
эксцентриситета
2
e
0
)t(
зд
c
,
t
25
которое устанавливает динамическую связь ошибки приводки по соседней
краске
i,1i
s
с длиной участка бумажной ленты
tL
i
, линейной скоростью
движения ленты
i
V в печатном аппарате, фазами формных цилиндров
t
1i
и
ii
Tt
, а также относительными удлинениями бумажной ленты на входе
1i
и выходе
i
i-ого печатного аппарата. (Здесь
i
T - постоянная времени i-ого
участка, d – диаметр формных цилиндров).
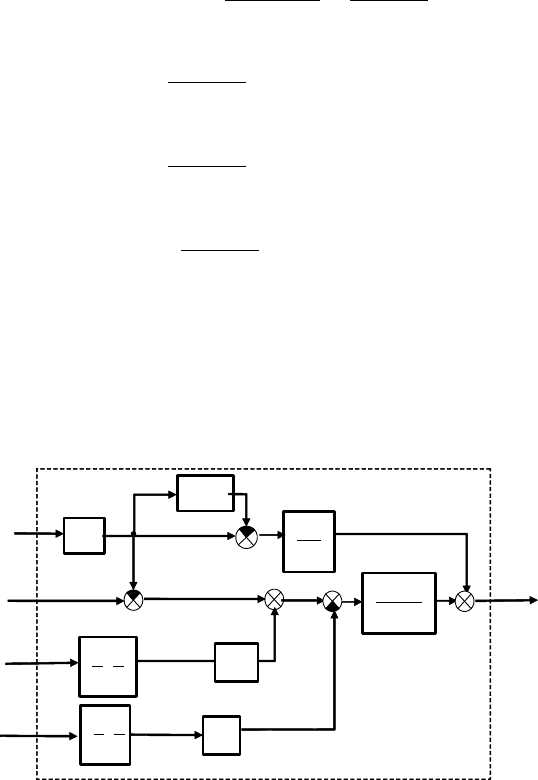
По результатам линеаризации уравнения (28) составлена математическая
модель процесса приводки красок, представленная на рис.24. С помощью этой
модели определены передаточные функции каналов приводки:
1pT
1
pT
e1
k)p(W
ii
pT
s
i
i,1ii,1i
; (29)
1pT
1
)p(W
i
s,L
i,1ii
; (30)
1pT
k
W
i
)p(s
i,1i,1i
; (31)
1pT
k
)p(W
i
s
i,1ii
. (32)
Здесь:
**
ii
V/LT - постоянная времени i-ого участка ленты;
**
i
1/Lk
-
коэффициент передачи по относительному удлинению, 2/dk
-
коэффициент передачи по фазе формного цилиндра.
k
i
pT
e
pT
1
i
1pT
1
i
1i
i
L
1i
V
p
1
d
2
1i
i,1i
s
i
V
p
1
d
2
i
k
k
Рис.24. Линеаризованная математическая модель процесса приводки красок
Рассмотрены различные способы определения ошибок приводки в
четырех красочной рулонной печатной машине: по текущей соседней метке, по
26
текущей базовой метке, по общей базовой метке. Исследованы частотные
характеристики каналов приводки и их динамические характеристики.
Показано, что при наличии гармонических возмущений наихудшим является
способ определения ошибок приводки по первой базовой краске
1,i
s (
4
,
3
,
2
i
).
Лучшими свойствами обладает способ определения ошибок по последней
базовой краске
4,i
s (
3
,
2
,
1
i
), так как в этом случае базовая краска не
подвергается активному воздействию возмущений. Меньшие динамические
ошибки наблюдаются, если базовая краска расположена внутри печатной
машины, например, вторая или третья. Для пяти красочной печатной машины
целесообразно использовать способ определения ошибок приводки по третьей
средней метке.
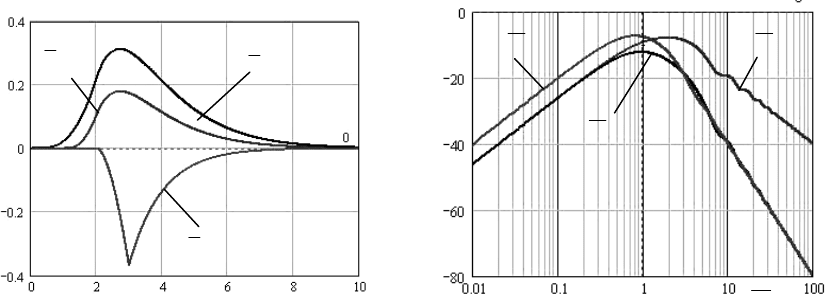
На рис.25 и 26 показаны графики переходных характеристик ЛАЧХ
каналов приводки по второй общей базовой краске при изменении
относительного удлинения ленты
0
на входе в РПМ. Видно, что каналы
приводки по первой и третьей краскам имеют общую низкочастотную
асимптоту с наклоном +40дБ/дек и разные высокочастотные асимптоты: -20
дБ/дек – канал первой краски и -40 дБ/дек – канал третьей краски. В свою
очередь, четвертая и третья краски имеют общую высокочастотную асимптоту
с наклоном -40 дБ/дек и параллельные низкочастотные асимптоты с наклоном
+40дБ/дек.
120
L
320
L
420
L
12
s
32
s
42
s
Рис.25. Переходные характеристики
каналов приводки по второй общей базовой
метке и при ступенчатом изменении
относительного удлинения ленты
0
Рис.26. ЛАЧХ каналов приводки по второй
общей базовой метке и при изменении
относительного удлинения ленты
0
27
Отсюда следует, что в области низких частот наименьшими
помехозащитными свойствами обладает канал четвертой краски, а в области
высоких частот наихудшими свойствами обладает канал первой краски. По
сравнению с характеристиками приводки по последней базовой метке данный
способ обеспечивает уменьшение величины динамических отклонений
приводки в два раза (0,35 против 0,7). Однако он обладает несколько худшими
свойствами с точки зрения фильтрации высокочастотных помех.
В шестой главе представлены результаты вычислительного
эксперимента, проведенного на математической модели процесса приводки,
реализованной в интегрированной среде Simulink пакета Matlab. Компьютерная
модель лентопитающей системы РПМ была составлена на основе следующих
соотношений:
)t(L
)t(LL
i,0
i,0i
i
(33)
dt
1
V
1
V
L)t(L
t
0
i
1i
1i
i
i,oi,0
(34)
0,i
0,i
i,0
1
L
L
(35)
iбi
EbF
(36)
Формула (33) описывает упругие свойства участка бумажной ленты. В
ней использованы следующие обозначения:
i
L - длина пути бумажной ленты
между двумя бумаговедущими парами; )t(L
i,0
- закон изменения количества
нерастянутой бумажной ленты в процессе функционирования объекта.
Формула (34) позволяет определить зависимость )t(L
i,0
как интеграл от
изменения подачи нерастянутой бумажной ленты через
i
-ую (входную) и
)
1
i
(
-ую (выходную) бумаговедущие пары. Начальные условия
интегрирования определяются формулой (35), где
0,i
L - длина пути бумажной
ленты в нулевой момент времени;
0,i
- заданное начальной значение
относительного удлинения ленты. Выражение (36) устанавливает связь между
28
механическими характеристиками ленты
б
E,,b
, ее относительным
удлинением
i
и силой натяжения ленты
i
F . Следует отметить, что данные
формулы характеризуют принципы функционирования ЛПС как
технологического объекта. Они физически прозрачны и достаточно ясно
описывают характер внутренних связей в ЛПС. Так как в процессе офсетной
печати лента получает некоторое количество влаги, то под действием силы
натяжения она приобретает вязкоупругие свойства. В настоящей работе для
описания реологических свойств бумажной ленты использована вязкоупругая
модель Максвелла, реологическое уравнение которого имеет вид:
dt
d
dt
d
(37)
где
б
E/
- время релаксации, определяемое как отношение динамического
коэффициента вязкости
демпфера к модулю упругости
E
упругого элемента.
Наряду со временем релаксации часто бывает удобно рассматривать обратный
показатель
/
1
. В качестве основы компьютерной модели продольной
приводки было выбрано уравнение (28) и уравнение отсчета фаз
t
0
ii
dV
d
2
t (i=1, 2, 3, 4) (38)
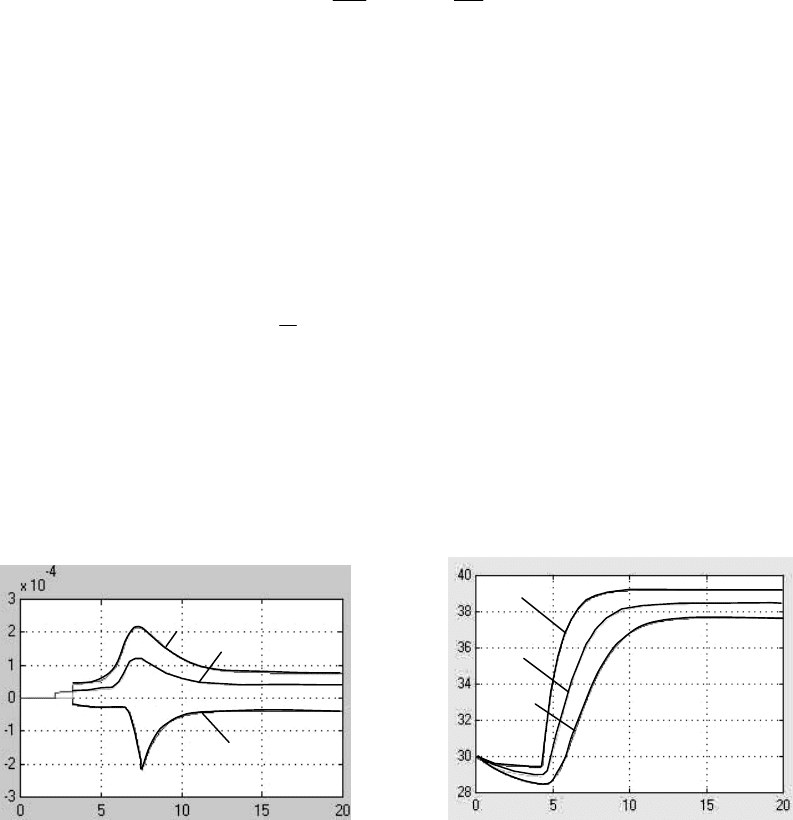
Переходные характеристики по второй общей базовой краске (см. рис.27)
вызывают интерес тем, что у них установившиеся ошибки приводки по
предшествующей первой краске и последующим третьей и четвертой краскам
имеют разные знаки, что уменьшает суммарную ошибку приводки.
c
,
t
c
,
t
120
s
320
s
420
s
1
F
2
F
3
F
Рис.27. Переходные характеристики
каналов приводки по второй общей
базовой метке при ступенчатом
изменении входного натяжения на 10кГ
и
1
c04,0
.
Рис.28. Переходные характеристики
усилий натяжения ленты при
ступенчатом изменении входного
натяжения на 10кГ. и
1
c04,0
.
29
С этой точки зрения использование метода определения ошибок
приводки по второй общей базовой краске является более предпочтительным.
Динамические характеристики усилий натяжения ленты, изображенные на
рис.28 показывают, что вязкие свойства вызывают последовательное
уменьшение установившегося натяжения ленты примерно на 4кГ, т.е. 36кГ на
первом участке, 32кГ на втором и 28кГ на третьем участке ЛПС. Если
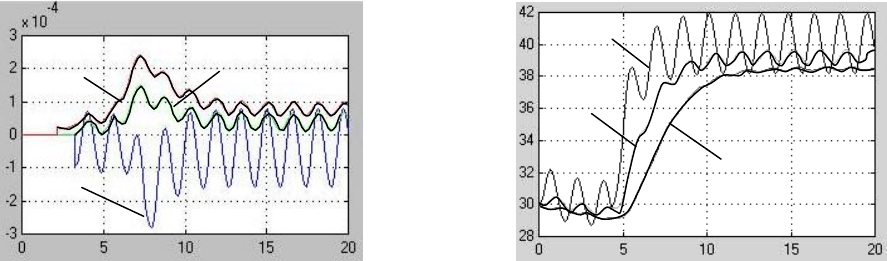
использовать в качестве базовой вторую краску (см. рис.29) наибольшая
амплитуда установившихся колебаний приводки около 0,08мм наблюдаются по
первой краске. По третьей и четвертой краскам в этом случае наблюдаются
установившиеся колебания c амплитудой 0,02мм. На рис.30 представлены
переходные характеристики ЛПС по натяжению ленты, которые показывают,
что каждый из участков бумажной ленты уменьшает амплитуду вынужденных
колебаний примерно в пять раз. Исследованы динамические свойства системы
коррекции приводки, которая функционирует в двух режимах: ускоренной
компенсации и поддержания установившегося значения сигнала ошибки.
В первом режиме она обеспечивает ускоренную компенсацию больших
динамических ошибок приводки, а во втором – обеспечивает поддержание
малых отклонений приводки с помощью дополнительного накопления сигнала
ошибок. Для этого введено пороговое переключающее устройство, которое по
Рис.29. Переходные характеристики
каналов приводки по второй базовой метке
при ступенчатом изменении входного
натяжения на 10кГ,
1
c04,0
,
гармонической помехе при радиусе рулона
0
0,5м и
2,0A
0
.
Рис.30. Переходные характеристики усилий
натяжения ленты при ступенчатом
изменении входного натяжения на 10кГ,
1
c04,0
, гармонической помехе при
радиусе рулона
0
0,5м и
2,0A
0
.
c
,
t
c
,
t
120
s
320
s
420
s
1
F
2
F
3
F
30
величине порога срабатывания
cр
производит смену управляющего алгоритма
при изменении режима функционирования объекта, в соответствии с условием.
n,ik
s
cрnik,n,ik
s если ,s
cрnik,
n
n,ik
s если ,s
oc
(39)
На рис.31 показан процесс коррекции приводки при измерении ошибок
по второй общей базовой краске. В этом случае датчик приводки находится на
выходе четвертой печатной секции. На рис.32 представлены осциллограммы
управляющих воздействий системы управления приводкой по второй общей
базовой краске с адаптивным алгоритмом оценивания ошибок приводки.
В седьмой главе представлены результаты динамического анализа
красочных аппаратов. Для красочного аппарата общего вида предложено
операторное векторно-матричное уравнение:
pxpBpXpApX
0
(40)
Здесь
T
k21
)p(x),...,p(x),p(x)p(X
- вектор изображений толщин красочных
слоев, т.е.
thLpx
121
,
thLpx
232
,…,
thLpx
отk
.
pB
0,0,0,0,0,e
pT
01
- вектор коэффициентов передачи входных воздействий;
thLpx
010
- изображение входного воздействия;
pA - матрица
коммутации красочных потоков, рассматриваемого аппарата.
Решение векторно-матричного уравнения красочного аппарата имеет вид:
1
3
4
c
,
t
12
s
32
s
42
s
c
,
t
Рис.31. Динамические характеристики
процесса коррекции приводки по второй
общей базовой метке при начальном
радиусе рулона 5,0
м
Рис.32. Осциллограммы управляющих
сигналов системы регулирования приводки
по второй общей базовой метке при
начальном радиусе рулона 5,0
м