Сборник - Тезисы конференции Геомодель - 2011
Подождите немного. Документ загружается.


«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
Рисунок 3. 3D сеточная слоисто-блоковая плотностная модель земной коры юга Западно-
Сибирской плиты и Сибирской платформы, показанная в виде вертикальных и
горизонтального сечений. Блоки с разной плотностью выделены разным цветом.
Построение 3D градиентно-слоистой модели проводилось как один из этапов при
построении плотностной модели земной коры в окрестности опорного профиля 1-СБ. Так, на
начальном этапе при решении обратной задачи гравиразведки по Андрееву А.В., упоминаемому в
начале доклада, было получено 3D распределение избыточной плотности в земной коре. Для
получения 3D распределения собственно
плотности в земной коре полученная избыточная плотность,
в рамках методики, разработанной во ВНИИгеосистем [1], суммируется с региональным изменением
плотности с глубиной, меняющейся от 2.3 до 3.2г/см
3
.
Описываемые технологические средства получения 3D плотностной модели могут быть
использованы также при решении следующих задач:
- проверки адекватности исходной модели наблюденному гравитационному полю.
- для редуцирования эффекта от глубинных границ (построенных по профилям ГСЗ) при решении
обратных задач для верхней части земной коры,
- для реализации решения обратной задачи методом интерактивного подбора,
-
для оценки качества полученных 3D распределений эффективной плотности методами (по
Б.А.Андрееву и др.).
Литература
1.
Галуев В.И., Каплан С.А., Никитин А.А. Технология создания физико-геологических
моделей земной коры по опорным профилям на основе геоинформационных систем. М.
ВНИИгеосистем, 2009г.- 236с.
2. Приезжев И.И. Построение распределений физических параметров среды по данным
гравиразведки, магнитометрии. ГЕОФИЗИКА, 2005, №3. с. 46-51.
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
ОТБЕЛИВАЮЩАЯ ИНВЕРСИЯ СЕЙСМИЧЕСКИХ ДАННЫХ (WHITENING INVERSION).
Приезжев И.И.* (Шлюмберже)
Резюме. Предлагается технология отбеливающей инверсии (Whitening Inversion) и отбеливания
сейсмических данных с выделением отдельного импульса по каждой трассе. Для стабилизации решения
использована теория регуляризации А.Н.Тихонова (1979). Технология реализована в программном комплексе
Petrel. Метод используется для экспрессных вычислений акустического импеданса и оценки физических
свойств горных пород при геологическом моделировании. Предлагаемая методика демонстрируется на
модельных и на практических примерах.
Введение.
Глубокое использование амплитудной информации сейсмических данных для оценки физических
свойств горных пород при геологическом моделировании является весьма актуальной задачей на этапе
разведочных работ, а также при сложных геологических условиях – трещиноватые коллекторы, сложная
тектоника и т. д. В настоящее время существуют следующие классификации сейсмических инверсий: по
способу решения уравнения свертки (детерминистическая инверсия, стохастическая инверсия), по типу
входных данных (инверсия по полным суммам, инверсия по угловым суммам) (Levy, S. and Fullagar, P. K.,
1981, Кащеев Д.Е., Кирнос Д.Г., 2002, Lancaster and Whitcombe, 2000).
Нужно отметить, что современные технологии инверсии становятся очень сложными и используют
элементы моделирования с привлечением большого объема априорной информации для создания
первоначальной низкочастотной модели. При этом используются результаты структурной интерпретации
сейсмических данных для изучаемого слоя. Низкочастотная модель создается на основе интерполяции
скважинных измерений в межскважинное пространство с учетом разбиения изучаемого слоя на тонкие
прослойки. Качество таких моделей сильно зависят от качества временной привязки скважин, способа разбивки
пласта на тонкие прослойки (следуя кровле, подошве или пропорциональная разбивка), алгоритма
интерполяции. Часто в таких технологиях вводятся параметр доверия сейсмики или доверия низкочастотной
модели (скважинам). Как показывает практика, результат обычно очень похож на первоначальную
низкочастотную модель, и если структурная основа или другие параметры такой модели задана неправильно, то
результат такой инверсии также будет неправильным. При анализе результатов инверсии на основе
моделирования очень сложно понять, где решение идет от сейсмических данных и где от априорной
информации (первоначальной низкочастотной модели). Для того чтобы не вводить в заблуждение
пользователей результатами таких операций предлагается не называть эти технологии сейсмической инверсией
а определить их название как инверсионное моделирование. Кроме этого для более четкого разделения
объективной и субъективной информации предлагается разделение этого процесса на два этапа:
Собственно сейсмическая инверсия, полученная с минимальным использованием субъективных
представлений о строении изучаемой среды. Результаты такой инверсии покажет объективные
возможности сейсморазведки для оценки физических свойств горных пород.
Моделирование с использованием всех наборов исходной объективной информации и создания
целостной модели среды и анализа ее неопределенности. На этом этапе максимально используется
субъективное понимание геолога о строении недр и является авторским результатом.
Теория метода.
Обычно все коммерческие технологии детерминистической инверсии базируются на классической
одномерной модели сейсморазведки, которая предполагает плоскопараллельную среду и описывается
уравнением свертки (Шерифф Р., Гелдарт Л., 1987)
)()()( twtrts
(1)
где
Z
Z
r
2
– коэффициенты отражения вдоль сейсмической трассы, вычисляемые как нормированный
скачек значений акустического импеданса
VZ
(произведение плотности
на скорость
V
продольных
волн) для каждой элементарной границы,
w
– сейсмический импульс,
s
– наблюдаемый сейсмический
сигнал,
t
– время пробега сигнала.
В спектральной области уравнение свертки будет иметь вид произведения спектров согласно теореме о
свертке:
)()()( wWwRwS
, (2)
где
][sFS
- спектр наблюдаемого сейсмического сигнала, F[] - оператор преобразования Фурье,
R
- спектр коэффициентов отражения,
W
- спектр сейсмического импульса,
tw /1
- частота.
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
Для получения спектра коэффициентов отражения, рассмотрим спектр каждого отражения. Каждое k-е
отражение порождает спектр
k
iwt
k
er
, где
1i
. Общий спектр коэффициентов отражения будет суммой
спектров отдельных отражений
K
k
iwt
k
k
erwR
1
)(
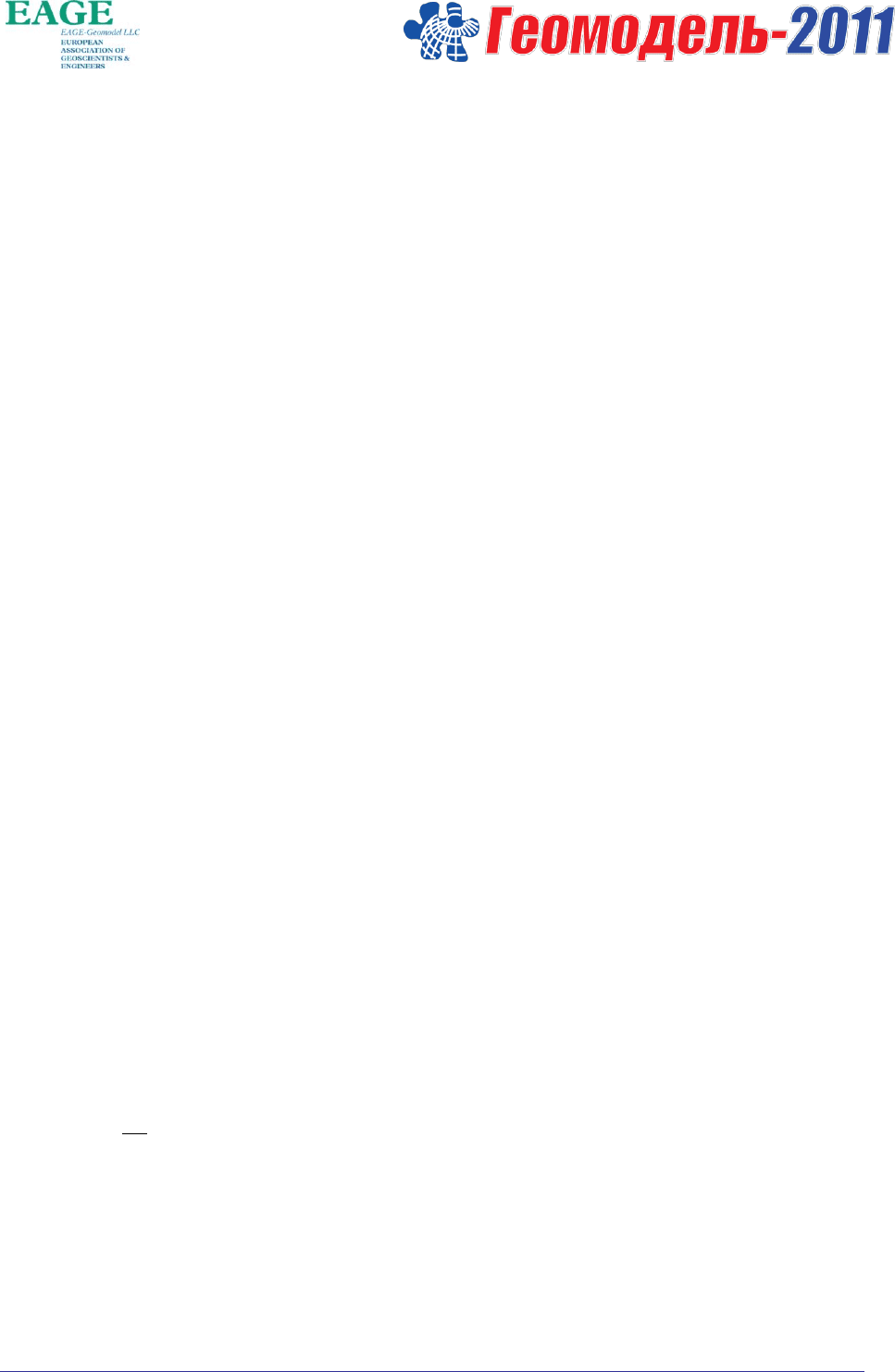
где К общее количество отражений. На рисунке 1 показан
расчет по этим формулам амплитудного спектра коэффициентов отражения для случайно расположенных
отражений. Одно отражение дает постоянный спектр и для большего количества отражений амплитудный
спектр имеет более сложный вид с амплитудами в диапазоне от нуля до единицы. Очевидно, что фазовый
спектр отражает положение отражений.
Рисунок 1. Амплитудный спектр коэффициентов отражения для случайно расположенных отражений. Цвет
кривых амплитудного спектра соответствует количеству отражений: а1 - одно отражение, а2 - два
отражения, а5 - пять отражения, а10 - десять отражений, а100 - сто отражений, а1000 - тысяча
отражений.
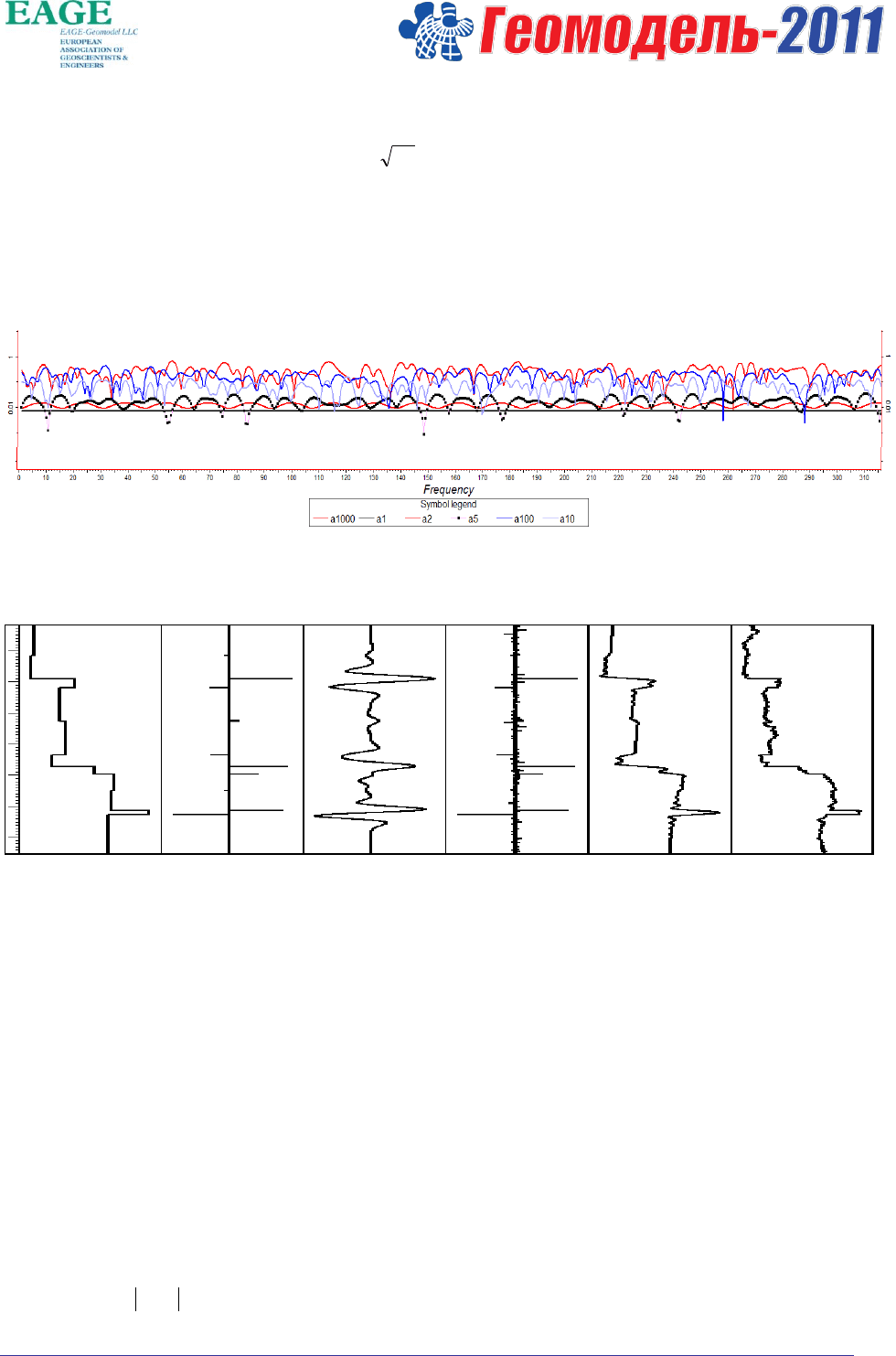
Рисунок 2. Первая панель слева – модельная кривая акустического импеданса, вторая панель – точные
значения коэффициентов отражения рассчитанных по кривой акустического импеданса, третья панель -
модельный сейсмический сигнал как свертка коэффициентов отражения импульса (Ricker 30гц), четвертая
панель коэффициенты отражения, восстановленные только по фазовому спектру сейсмического сигнала (без
регуляризации). Пятая панель – акустический импеданс, построенный по сейсмическому сигналу с учетом
импульса, шестая панель – акустический импеданс, построенный только по фазовому спектру сейсмического
сигнала (кривая на панели 4).
На рисунке 2 показан модельный пример вычисления коэффициентов отражения и соответствующий им
акустический импеданс только по данным фазового спектра сейсмического сигнал. Анализируя рисунок 1 и
рисунок 2 можно сделать вывод, что если принять амплитудный спектр коэффициентов отражения в виде
постоянной величины («белый спектр»), то все основные отражения будут восстановлены. Отражения с малой
амплитудой могут быть потеряны среди паразитных шумовых помех. Необходимо отметить, что эти выводы
сделаны на основе анализа множества моделей, аналогичной той, что показывается на рисунке 2.
С другой стороны, если принять что коэффициенты отражения являются реализацией случайной
некоррелированной функцией (Ayon K. Dey and Laurence R. Lines, 1997), то функция автокорреляции будет
близка к единичному импульсу (функция Дирака), а амплитудный спектр коэффициентов отражения
)(wR
является спектром типа белого шума близкой к постоянной функции. Это приближение и результаты
модельных исследований (рис. 1, 2) позволяет найти приблизительный амплитудный спектр нуль-фазового
статистического импульса:
)()( wSwW
(3)
Амплитуда dB
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
С другой стороны нужно понимать что выражение (3) является приближенным и вносит помехи в
решение, как показано на рисунке 2 (панели 4, 6), также об этом говорится в публикации Li Guofa (Li Guofa и
др.,2009). Поэтому при использовании (3) нужно обязательно использовать методики стабилизации решения с
использованием априорной информации общего или специального вида (Тихонов А.Н., 1973).
Для обращения (2) обычно применяется обратная фильтрация по Винеру (1949):
)]()([
)]()([
)(
)()(
)(
*
*
2
*
wRwRE
wNwNE
wW
wSwW
wR
, (4)
где индекс (*) означает комплексное сопряжение, E[] – оператор математического ожидания,
)]()([
)]()([
*
*
wRwRE
wNwNE
- отношение энергетического спектра шума к энергетическому спектру результата, в нашем
случае энергетический спектр коэффициентов отражения.
Выражение 4 фактически является спектральным аналогом кригинга (Deutsch, 2002) и требует знание
энергетического спектра результата (как спектр функции автокорреляции) в качестве априорной информация.
Если в выражении 4 задать постоянную величину отношения отношение энергетического спектра шума к
энергетическому спектру результата, что является обычной практикой применения деконволюция по Винеру,
то это, фактически, является требованием получения результата с «белым» спектром, несмотря на то что в
выражении 4 импульс задан в явным виде. На эту проблему впервые обратил внимание А.Н. Тихонов (1973)
который показал, что от задания формы отношения энергетического спектра шума к энергетическому спектру
результата очень сильно зависит сам результат Винеровской фильтрации.
С учетом (3) и на основе теории регуляризации А.Н. Тихонова обращение (2) можно выразить в следующем
виде:
)()(
)()(
)(
2
wMwS
wSwS
wR
(5),
где
)(wM
- функционал регуляризации по А.Н.Тихонову, согласно его рекомендаций он должен быть
построен на априорной информации или для получения гладкого и стабильного решения
p
wwM
2
)(
, где
р>0,
- коэффициент регуляризации. Для нашего случая для построения функционала регуляризации
используется параметр «средняя толщина слоя».
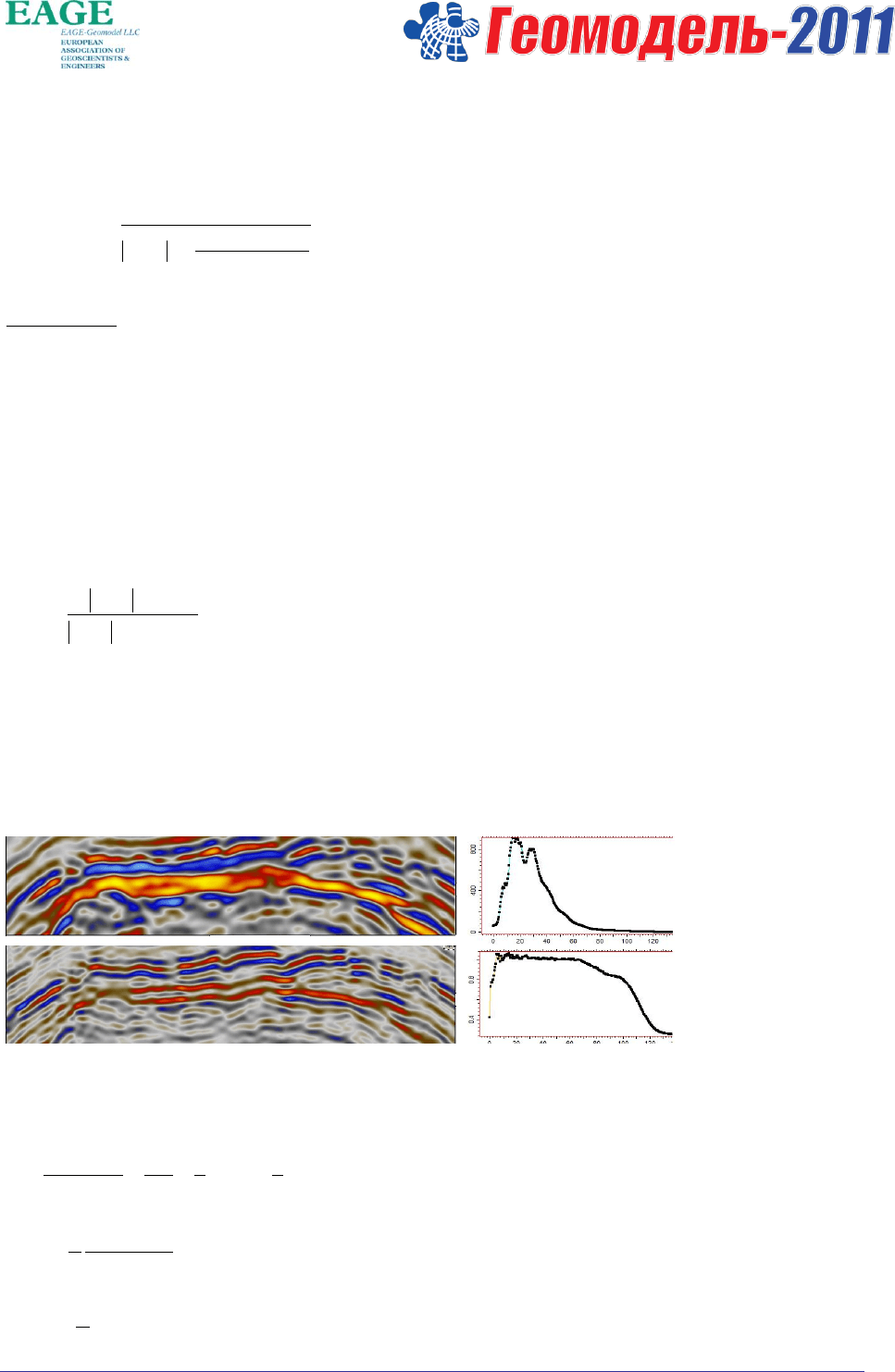
Выражение 5 можно использовать для спектрального отбеливания. При этом для каждой трассы используется
свой статистический импульс, который оценивается на основе выражения 3 и с учетом регуляризации. На
рисунке 3 показан результат применения оператора отбеливания.
Рисунок 3 Результат сейсмического отбеливания. а) – исходный сейсмический разрез и соответствующий ему
спектр. б) – результат отбеливания по тому же разрезу и соответствующий ему спектр.
Приведем известное упрощенное выражение для набора коэффициентов отражения на сейсмической
трассе (Шерифф Р., Гелдарт Л., 1987):
)ln(ln
2
1
ln
2
1
2)(
1
1
1
ii
ii
ii
i
ZZZ
Z
Z
ZZ
ZZ
R
(6)
В предельном случае это выражение можно выразить в виде дифференциала:
dt
tZd
tR
)]([ln
2
1
)(
(7)
В спектральной области это будет выглядеть следующим образом:
)]([ln
2
1
)( tZiwFwR
(8),
a)
б)
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
где F[] – оператор преобразования Фурье,
iw
- операция дифференцирования в спектральной области.
Выражение (8) может использоваться для решения прямой задачи.
Используя (8) можно получить спектр логарифма акустического импеданса:
)(
2
]ln)([ln
0
wR
iw
ZtZF
(9)
где
0
Z
- неизвестное среднее значения импеданса.
Используя уравнение (5) и уравнение (9) получим окончательное уравнение для отбеливающей инверсии
―Whitening Inversion‖. Если сигнал является не нуль фазовым, то необходимо задать фазовый сдвиг
i
e
:
)()(
)()(
2
]ln)([ln
2
0
wMwSeis
wSeisewSeis
iw
ZtZF
i
(10)
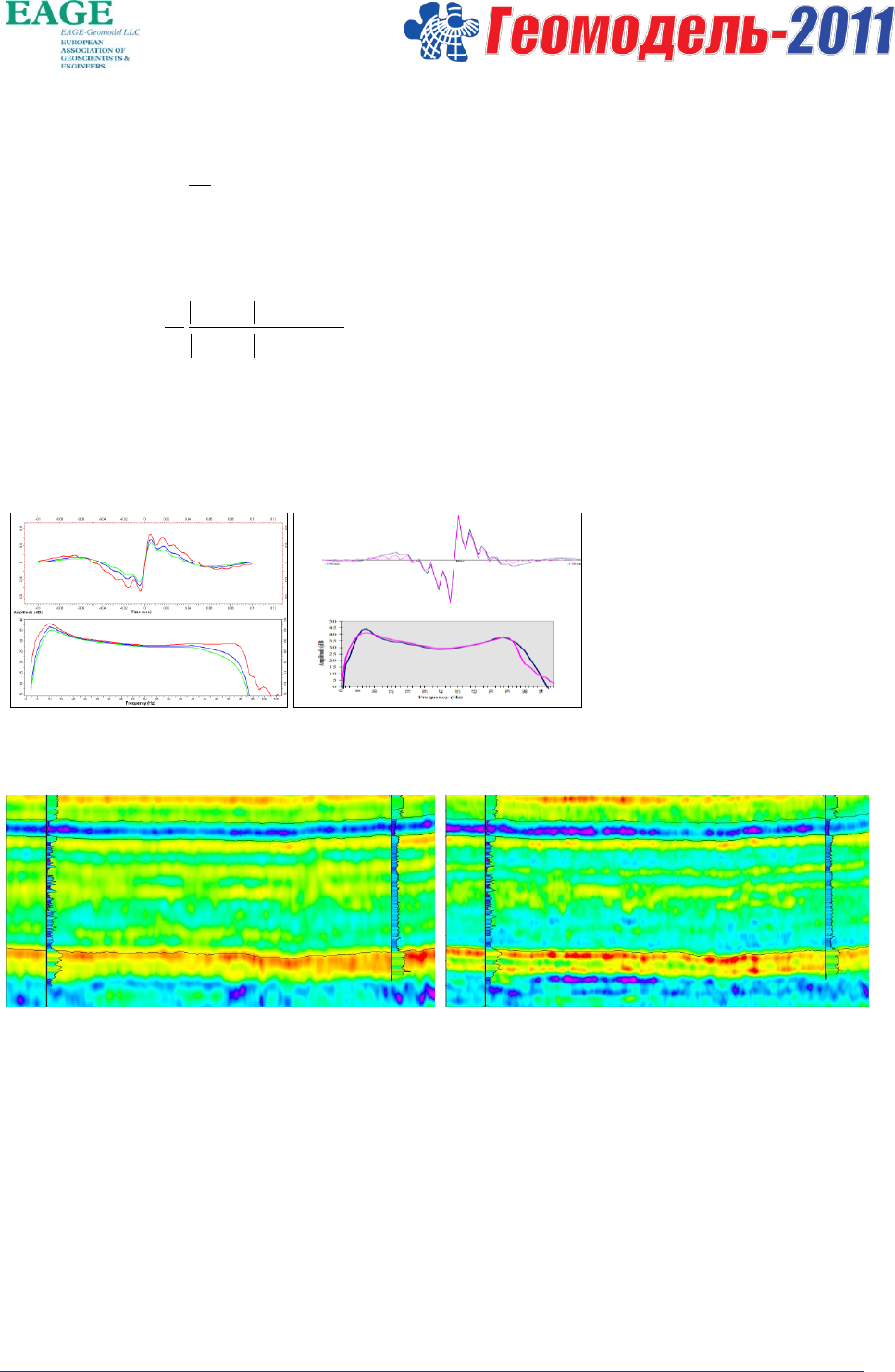
Оператор отбеливающей инверсии (10) и его спектр (рис 4) выглядит очень похожим на оператор и спектр
«цветной» инверсии ("coloured" inversion, Lancaster and Whitcombe, 2000). Заметим что «цветная» инверсия
является эмпирической, в то время как отбеливающая инверсия, как показана выше, выведена из теоретических
и физических предпосылок. На рисунке 5 показан пример применения отбеливающей инверсии и сравнении
результатов инверсии на основе применения импульса. Анализируя эти результаты можно видеть, что
разрешающая способность отбеливающей инверсии лучше импульсной инверсии.
Рисунок 4: а) – Оператор отбеливающей инверсии и его спектр для различных коэффициентов регуляризации
по А.Н.Тихонову (0.01- красная кривая, 0.1- голубая кривая, 1.0 – зеленая кривая), b) оператор и спектр
«цветной» инверсии ("coloured" inversion, Lancaster and Whitcombe, 2000).
Рисунок 5. Сравнение результатов инверсии на основе обращения сейсмического импульса - а) и отбеливающей
инверсии - б).
Заключение.
В заключение отметим, что основная идея, используемая при разработке предлагаемой технологии, это
минимально использовать априорную информацию при инверсии, что бы на первом этапе получить
объективный результат, не зависящий от первоначального приближения. На втором этапе-этапе моделирования
эти результаты могут быть использованы для моделирования в качестве объемного тренда. Скорость
вычислений очень высокая, так как используется алгоритм быстрого преобразования Фурье, возможны много -
потоковые вычисления. Стабильность вычислений обеспечивает регуляризация по А.Н.Тихонову.
Операция сейсмического отбеливания позволяет оперативно, без переобработки получить различные
варианты сейсмических данных для лучшей корреляции и понимания.
Литература.
1. Levy, S. and Fullagar, P. K., 1981, Reconstruction of a sparse spike train from a portion of its spectrum and application
to high-resolution deconvolution: Geophysics, 46, no. 09, 1235-1243.
2. Fast-track ‗coloured‘ inversion. Steve Lancaster BP Amoco, Sunbury UK, David Whitcombe BP Amoco, Aberdeen
UK, SEG 2000 Expanded Abstracts.
a)
б)
a)
б)

«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
3. Кащеев Д.Е., Кирнос Д.Г., 2002, Использование имитационного аннилинга для инверсии данных
сейсморазведки. журнал ЕАГО "Геофизика", спец. вып. "Технологии сейсморазведки-1". 2002. 75-80
4. N. Wiener, 1949, "The Extrapolation, Interpolation, and Smoothing of Stationary Time Series with Engineering
Applications," Wiley, New York,
5. Deutsch, C.V., 2002. Geostatistical Reservoir Modeling, Oxford University Press, 384 pp.
6. Шерифф Р., Гелдарт Л. Сейсморазведка. В двух томах. Москва, Мир, 1987. Тихонов А.Н., Арсенин В.Я.
Методы решения некорректных задач. М.: Наука. Главная редакция физико-математической литературы, 1979.
Изд. 2-е. - 288 с.
7. Никитин А.А. Теоретические основы обработки геофизической информации. - М.: Недра, 1986. 256 с.
8. Ayon K. Dey and Laurence R. Lines, 1997, Investigating the randomness assumption in wavelet estimation, CREWES
Research Report — Volume 9.
9. Li Guofa , Zhou Hui and Zhao Chao,2009, Potential risks of spectrum whitening deconvolution - compared with well-
driven deconvolution. Pet.Sci.(2009)6:146-152

«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ СЕЙСМОРАЗВЕДКИ ПУТЕМ ПРИМЕНЕНИЯ
ОДИНОЧНЫХ СЕЙСМОПРИЕМНИКОВ.
Череповский А.В.* (SERCEL)
Краткое содержание
В настоящее время в регионах с простыми поверхностными условиями мы наблюдаем резкое
повышение плотности (и, соответственно, кратности) сейсмических наблюдений за счет уменьшения
шага между каналами и шага между пунктами возбуждения. Естественно, что при этом уменьшаются
базы групп как
приемников, так и источников. Многие современные сейсмические съемки
характеризуются «точечной» регистрацией сейсмических данных, когда стандартные группы из 6-12
сейсмоприемников ставятся «в точку» (на площадке не более одного кв. м), а во многих случаях
применяются одиночные геофоны или одиночные трехкомпонентные цифровые датчики. Известные
недостатки регистрации данных одиночными приборами можно преодолеть за счет
высокой
плотности наблюдений. В такой модификации сейсморазведка позволяет получить более точную
информацию о строении и вещественном составе исследуемой среды.
Группы или одиночные приемники
В многочисленных опубликованных сравнениях групп геофонов с одиночными датчиками показано,
что при одинаковом шаге наблюдений группы геофонов обеспечивают более высокое отношение
сигнал/помеха как на исходных записях,
так и на окончательных суммарных разрезах, в то время как
одиночные приемники обеспечивают более высокую разрешенность за счет сохранения высоких
частот. Группы приемников не только ослабляют высокие частоты (50-100 Гц) из-за статики внутри
групп, но и искажают амплитудную информацию на больших удалениях из-за невертикальности
выхода лучей отраженных волн на поверхность
наблюдений и сферичности волнового фронта.
Последние факторы могут иметь намного большее влияние на регистрируемые сейсмические данные,
чем статика внутри групп, особенно при высокоскоростной ВЧР [7]. Практические примеры
показывают, что амплитудная информация на больших удалениях, важная для AVO-анализа и других
методов оценки вещественного состава среды, гораздо лучше сохраняется при использовании
одиночных приемников
с сокращенным интервалом пунктов приема [4].
Поскольку одиночные приемники не подавляют ни волны-помехи, ни случайные помехи, то шаг
наблюдений должен быть сокращен до 5-10 м, чтобы избежать аляйсинга и помех, и сигнала, и
эффективно подавить помехи многоканальными фильтрами на этапе обработки. Исходные записи,
полученные с одиночными приемниками, зачастую выглядят очень зашумленными, и
преимущества
регистрации данных одиночными приемниками раскрываются только после обработки данных [3].
Известны случаи, когда применение групп сейсмоприемников мешало решению геологических задач.
Например, в Кувейте съемки с обычными группами геофонов позволяли получать изображения с
низкой разрешенностью по горизонтали и вертикали на уровне целевых пластов, и увеличение базы
групп только ухудшало регистрируемый сигнал
из-за аляйсинга [1]. Съемки 1996 и 1998 гг.,
сделанные с целью мониторинга заводнения пласта, не позволили выделить сигнал 4Д, то есть не
позволили закартировать миграцию пластовых флюидов. Попытки определить коллекторские
свойства также были безуспешными. И только в 2004 г. был получен массив высококачественных
данных с высокой плотностью наблюдений и одиночными геофонами с шагом 5 м
. Полоса частот
была расширена на уровне целевого горизонта с 44 до 70 Гц. Этот массив данных был пригоден для
расчета коллекторских свойств и стал опорным для последующего мониторинга месторождения.
На этапе обработки этого массива данных применялось цифровое группирование (DGF),
включающее три основных этапа: 1) расчет и ввод поправок в запись каждого приемника для
компенсации
вариаций сигнала внутри группы (из-за рельефа и неоднородностей ВЧР); 2) адаптивная
фильтрация для подавления различных волн-помех, микросейсм и наводок от высоковольтных линий
электропередачи; 3) пересчет данных на желаемый шаг наблюдений, вплоть до шага между
одиночными приемниками. После такого цифрового группирования результирующий сигнал имеет
полосу частот, очень близкую к частотному составу на
исходных индивидуальных трассах, и
амплитуду, почти равную сумме индивидуальных амплитуд [2].
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
Рекордная съемка с одиночными геофонами в Катаре
Отдельно хотелось бы проанализировать рекордную (ультра-плотную) сейсмическую съемку с
одиночными приемниками в Катаре, выполненную в период с января 2009 по февраль 2011 гг.
Площадь работ была равна 860 кв. км и охватывала как сушу, так и переходную зону. За 26 месяцев
«супер-партии» предстояло отработать около 2
млн. виброточек, 50 тысяч взрывных ПВ и 263 тысячи
точек с воздушными пушками на мелководье. Партия располагала 40 тысячами каналов, а приемный
шаблон включал 36 линий по 672 приемника, то есть 24192 активных канала. Шаг ПП и ПВ, равный
7.5 м, позволил достичь кратности 504 в «естественном» бине 3.75 х 3.75 м. Такая система
наблюдений кажется более чем избыточной, но
заказчик этих работ руководствовался принципом «не
пожалеть в будущем о недостаточных усилиях при выполнении полевых работ» [5].
Прежние сейсмические данные в этой стране обеспечивали структурные построения и выбор точек
заложения скважин, но вертикальная и горизонтальная разрешенность была недостаточной для
количественного расчета фильтрационно-емкостных свойств (ФЕС) из-за ограниченного частотного
состава (10-45 Гц). И
в 2006 г. была выполнена пилотная съемка 3Д, которая подтвердила, что
высокая плотность наблюдений с одиночными приемниками может расширить частотный состав
данных до 100 Гц.
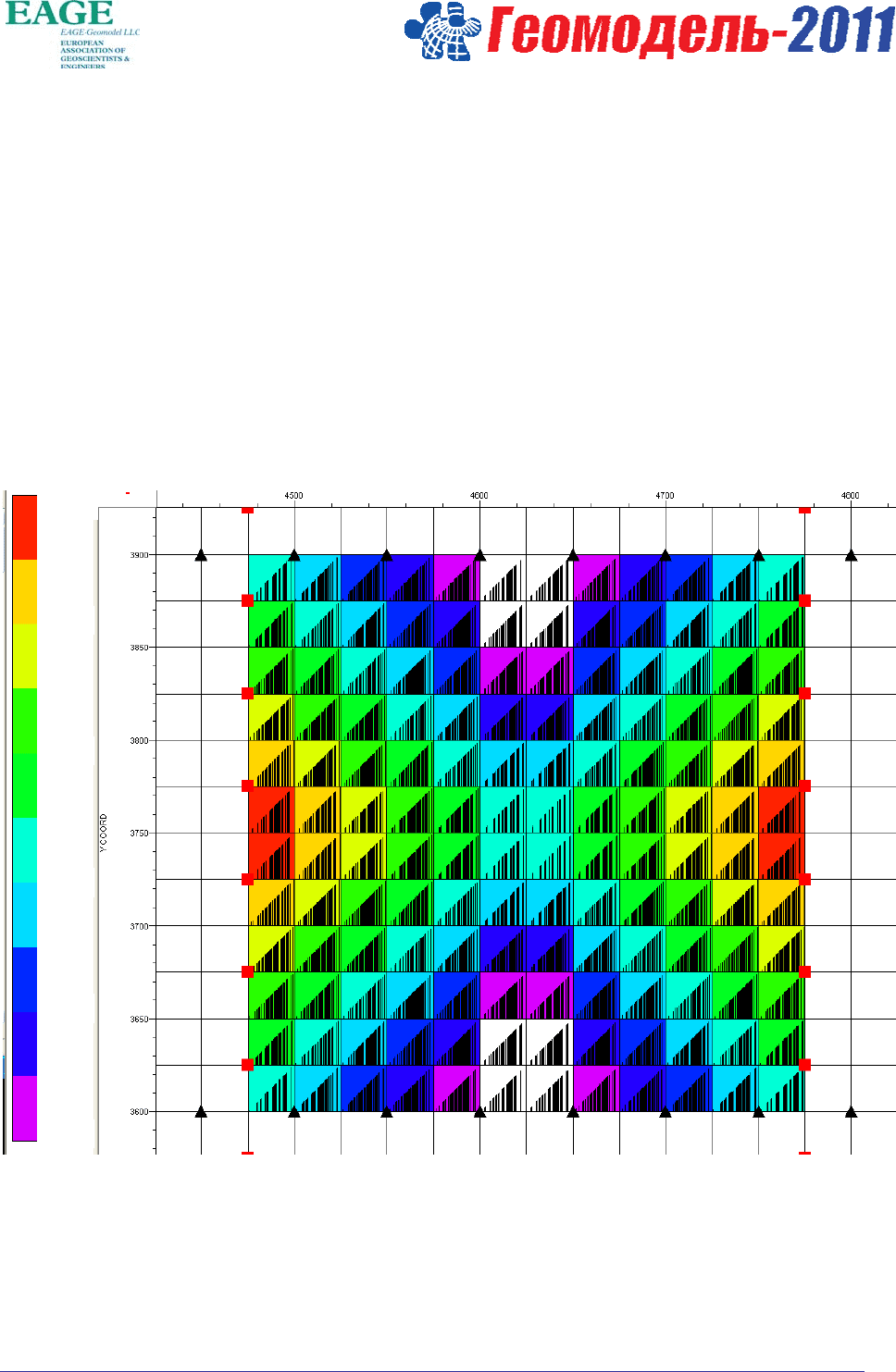
Рисунок 1. Фрагмент «стандартной» съемки 3Д с распределением трасс по удалениям в каждом
бине. Цвет отражает наибольшее удаление в каждом бине в шкале от 90 до 100% от
максимального удаления в съемке.
Для описываемой ультра-плотной съемки 3Д была принята простая ортогональная система
наблюдений с шагом линий приема 120 м и шагом
линий возбуждения 90 м. Хорошо известно, что
ортогональные съемки обладают более сильным отпечатком системы наблюдений (acquisition
footprint), чем съемки с косыми или зигзагообразными линиями возбуждения [6]. Но это
90%
92%
94%
96%
98%
100%
«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
утверждение, в действительности, справедливо для съемок с большим шагом линий приема и
возбуждения и, соответственно, низкой кратностью. Поэтому в эпоху низкой кратности съемок 3Д
(скажем, от 20 до 40 при типичном размере бина 25 х 25 м) важно было минимизировать отпечаток
системы наблюдений путем ее усложнения и/или удорожания (например, из-за большей суммарной
длины просек в лесистой местности).
Рассмотрим некоторые характеристики системы наблюдений с таким же размером приемной
расстановки, как в случае описываемой ультра-плотной съемки, но со «стандартным» шагом линий
приема и возбуждения, равным 300 м, и шагом ПП и ПВ, равным 50 м. Вместо активной расстановки
36 х 672 канала мы получим активную расстановку 14 х 102
канала. Номинальная кратность в
естественном бине 25 х 25 м снизится до 56, и неравномерность распределения трасс в бинах станет
очевидной (Рис.1). Наибольшее удаление в отдельных бинах снижается более чем на 10% от
величины максимального удаления в съемке (3154 м), что может выразиться в систематических
флуктуациях кинематических и динамических параметров, рассчитываемых как по продольным, так
и
по поперечным сечениям куба данных.
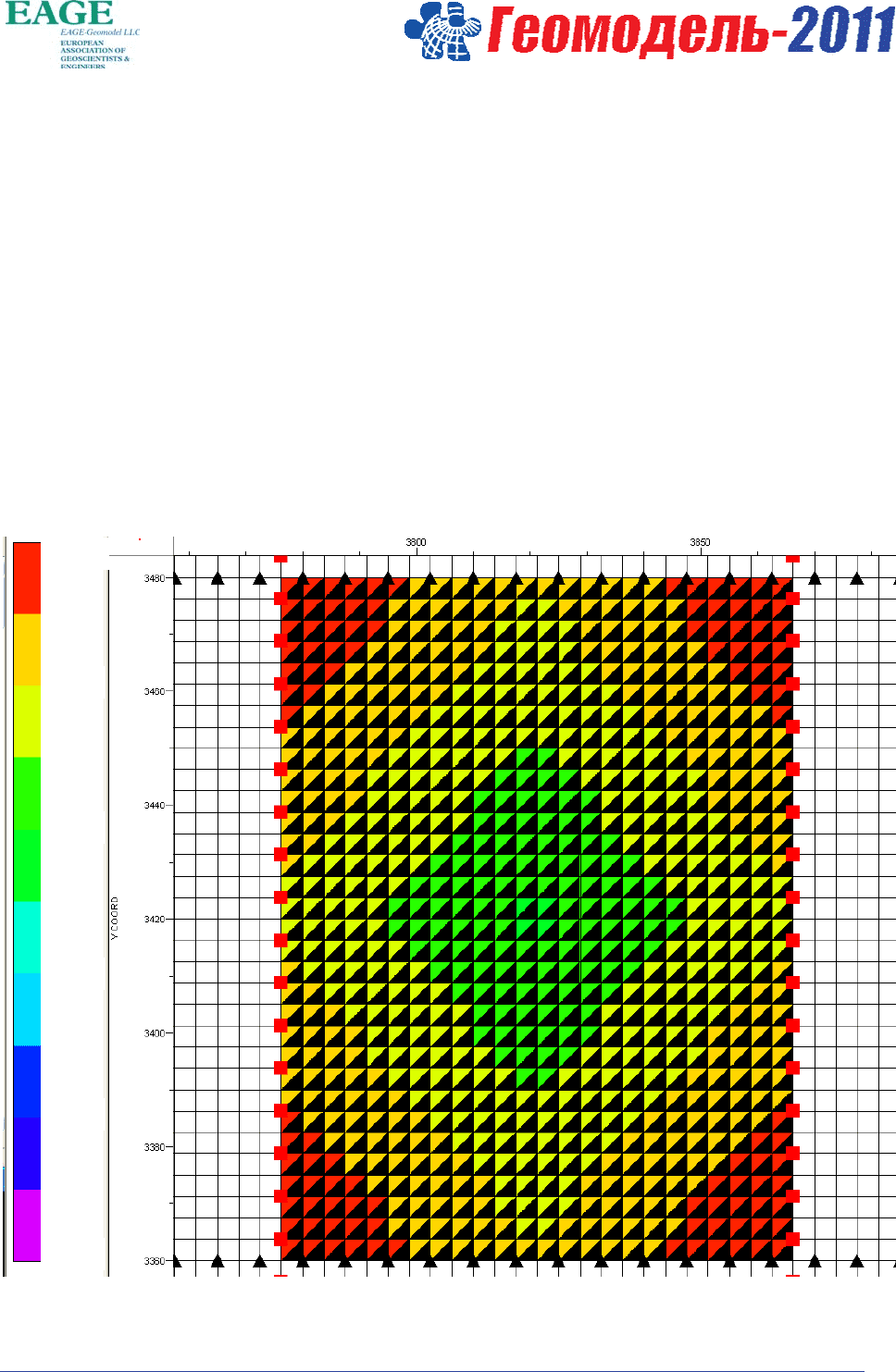
Повышение плотности наблюдений снижает неравномерность атрибутов бинов (Рис.2).
Действительно, для рассматриваемой ультра-плотной съемки наибольшее удаление в естественных
бинах (3.75 х 3.75 м) снижается уже не более чем на 3-4% от величины максимального удаления в
съемке (3314 м).
Рисунок 2. Фрагмент ультра-плотной съемки 3Д с распределением трасс
по удалениям в каждом
бине. Цвет отражает наибольшее удаление в каждом бине в шкале от 90 до 100% от
максимального удаления в съемке.
90%
92%
94%
96%
98%
100%

«Геомодель – 2011» - 13ая конференции по проблемам комплексной
интерпретации геолого-геофизических данных.
Россия, г. Геленджик, 11 – 15 сентября, 2011 г.
В анализируемой ультра-плотной съемке в Катаре плотность трасс превысила 35 миллионов на кв.
км, а объем зарегистрированных данных превысил 300 Тб (358 Гб на кв. км). Обработка таких
массивов исходных данных представляет собой непростую или даже нереалистичную задачу для
многих ВЦ – не только с точки зрения дисковой и оперативной памяти, но и с
точки зрения
программного обеспечения. Для съемок с такой высокой плотностью наблюдений многие
стандартные обрабатывающие процедуры не подходят, и нужны новые подходы к подавлению
интенсивных волн-помех и случайных помех, достижению поверхностной согласованности и т.д.
Насколько нам известно, после цифрового группирования плотность трасс будет снижена в 16 раз, до
2.24 млн. трасс
на кв. км, и данные будут обрабатываться с размером бина 15 х 15 м. Обработку
планируется завершить к середине 2012 года…
Выводы
Применение групп сейсмоприемников во многих случаях мешает решению геологических задач, а
именно количественному определению коллекторских свойств. Одиночные приемники позволяют
расширить частотный состав регистрируемых данных, но для обеспечения высокого отношения
сигнал/помеха
плотность наблюдений должна быть многократно повышена. Преимущества
сейсморазведки с одиночными приемниками раскрываются только на этапах обработки и
интерпретации данных.
Благодарности
Автор выражает благодарность Дени Мужно, главному геофизику компании SERCEL, за помощь в
подборе литературы и ценные советы по оформлению презентации.
Литература
1. Ayman Shabrawi, Andy Smart & Boff Anderson, 2005. How single-sensor seismic improved image of
Kuwait’s Minagish Field. First Break, Vol.23, Feb.2005, pp.63-69.
2. Malik Ait-Messaoud, Mohamed-Zerrouk Boulegroum, Aziza Gribi et al., 2005, New Dimensions in
Land Seismic Technology. Oilfield review, Autumn 2005, pp.42-53.
3. Mougenot, Denis & Thorburn, Nigel, 2004. MEMS-based 3C accelerometers for land seismic
acquisition: Is it time? The Leading Edge, March 2004, pp.246-250.
4. S.Q.Shi, Y.B.Du, Z.H.Yao et al., 2008. Digital point receiver seismic acquisition and pre-stack
reservoir characterization at Sulige gas field, China.
70
th
EAGE Conference & Exhibition, Rome, 9-12
June 2007, Extended Abstracts.
5. S.Seeni, J.Al-Mohammadi, P.Kermoal, P.Sauzedde, and F.Clow, 2011, Dukhan 3D, Ultra High
Density Full Wide Azimuth Seismic Survey – Transition Zone and Sabkha Acquisition. 73
rd
EAGE
Conference & Exhibition incorporating SPE EUROPEC 2011, Vienna, 23-26 May 2011, Extended
Abstracts.
6. Череповский А.В., От 3D к 3D/3C: как оптимизировать регистрацию обменных волн? – Тезисы
докладов IX Международной научно-практической конференции Геомодель-2007, Геленджик,
16-21 сентября 2007 г.
7. Череповский А.В., Пришло ли время отказаться от группирования в пользу одиночных
сейсмоприемников? – «Геофизика», №3, 2010, с.22-28.