Сапожников А.И., Нечаев М.А., Образцов К.В. Элементы систем автоматики: лабораторный практикум
Подождите немного. Документ загружается.

11
Лабораторная работа №2
ИССЛЕДОВАНИЕ МАГНИТНОГО УСИЛИТЕЛЯ
ЦЕЛЬ РАБОТЫ: изучение принципа действия, схем включения
магнитного усилителя с обратной связью и без неё, экспериментальное
снятие регулировочной характеристики магнитного усилителя.
1.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
1.1. Магнитный усилитель (МУ) – усилительно-преобразовательное
устройство, принцип действия которого основан на использовании
свойства дросселя переменного тока с ферромагнитным сердечником
изменять свою индуктивность при подмагничивании постоянным током
[1].
МУ отличается от других типов электрических усилителей своей
надежностью, простотой конструкции, стабильностью и практически
неограниченным сроком службы. Они могут использоваться во
взрыво-
и пожароопасных условиях, при наличии радиоактивного излучения. К
недостаткам МУ можно отнести сравнительно низкую чувствитель-
ность, невысокий КПД, большую массу.
Как известно, при прохождении электрического тока по обмотке в
ней возникает магнитное поле. Это поле характеризуется напряженно-
стью Н [А/м] и магнитной индукцией В [Тл]. При отсутствии у
катушки
сердечника зависимость индукции от напряженности поля носит линей-
ный характер:
0
B
H
μ
=
⋅ , (1)
где
0
μ
– магнитная проницаемость воздуха или магнитная посто-
янная.
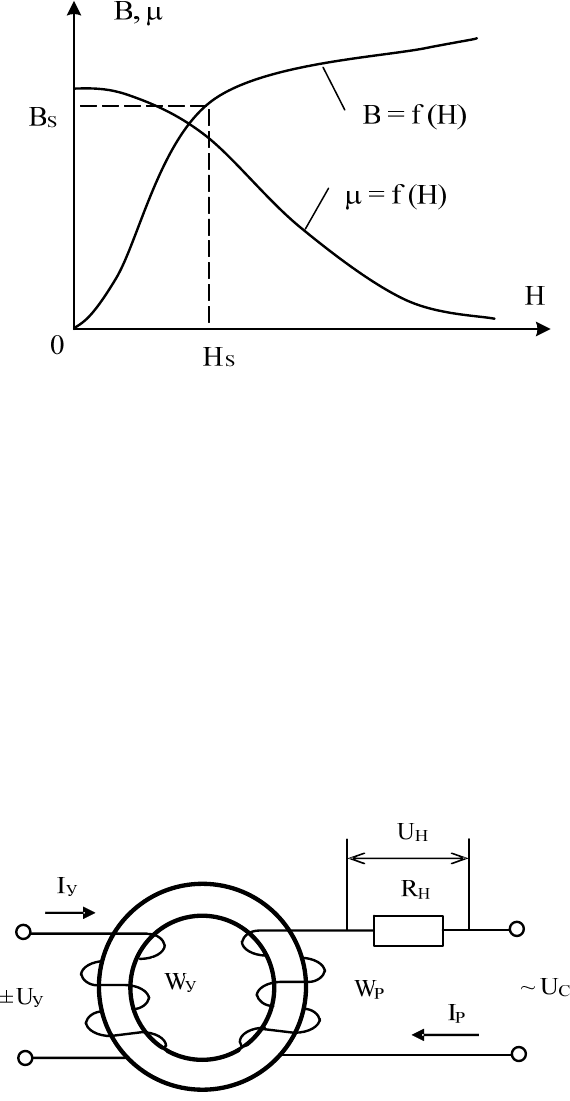
При введении в катушку сердечника из ферромагнитного материа-
ла магнитное поле усиливается, а зависимость (1) приобретает сущест-
венно нелинейный характер (рис. 1). Начиная с некоторого значения
напряженности магнитного поля дальнейшее её увеличение почти не
приводит к изменению магнитной индукции, при этом магнитный мате-
риал достигает
состояния насыщения.
Выражение (1) приобретает вид
0
B
H
μ
μ
=
⋅⋅, (2)
12
Рис. 1. Кривая намагничивания ферромагнитного материала
где
μ
– относительная магнитная проницаемость материала сер-
дечника, показывающая, во сколько раз проницаемость данного мате-
риала больше проницаемости воздуха (вакуума).
Магнитная проницаемость ферромагнитного материала – величина
непостоянная, она нелинейно зависит от напряженности магнитного по-
ля в нем (кривая ()
f
H
μ
= на рис. 1) и определяет характер намагничи-
вания материала.
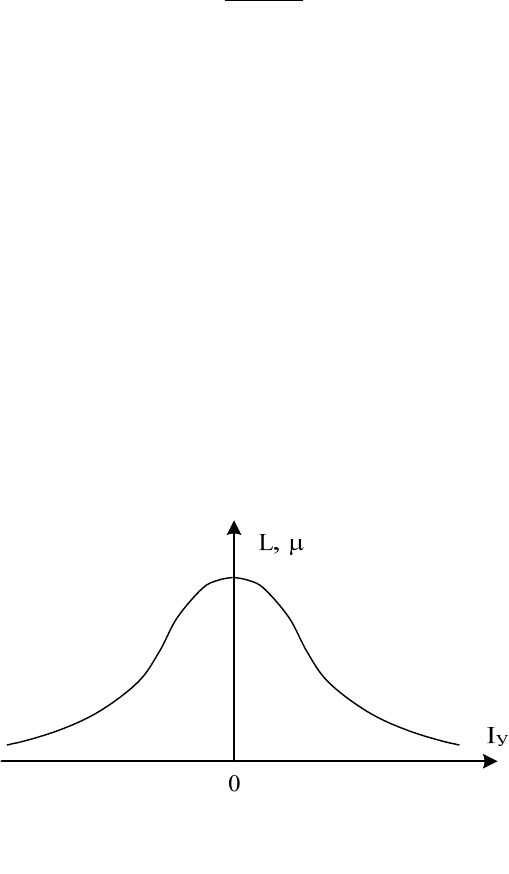
1.2. Простейший МУ состоит из двух обмоток, намотанных на об-
щем ферромагнитном сердечнике (рис. 2). Одна обмотка – рабочая с
числом витков
W
р
, другая – обмотка управления с числом витков W
у
.
Рис. 2
Через обмотку управления W
у
пропускается постоянный ток
У
I
, ко-
торый определяет напряженность магнитного поля в сердечнике. Рабо-
чая обмотка с последовательно включенной нагрузкой
H
R
подключает-
ся к сети переменного тока напряжением
C
U
.
13
Напряжение питания МУ распределяется между нагрузкой
H
R и
индуктивным сопротивлением рабочей обмоткой. Чем больше индук-
тивность
L
обмотки W
р
, тем меньше ток в рабочей цепи и меньше на-
пряжение на нагрузке. Индуктивность обмотки можно определить сле-
дующим образом:
2
0
P
WS
L
l
μ
μ
⋅
=
⋅⋅
, (3)
где
S и l – площадь поперечного сечения и длина средней линии
магнитопровода соответственно.
Очевидно, что индуктивность обмотки
L
пропорциональна маг-
нитной проницаемости материала магнитопровода
μ
. Проницаемость
же материала зависит от его магнитного состояния. При отсутствии то-
ка в обмотке управления сердечник не насыщен, проницаемость мате-
риала велика, соответственно велика и индуктивность рабочей обмотки.
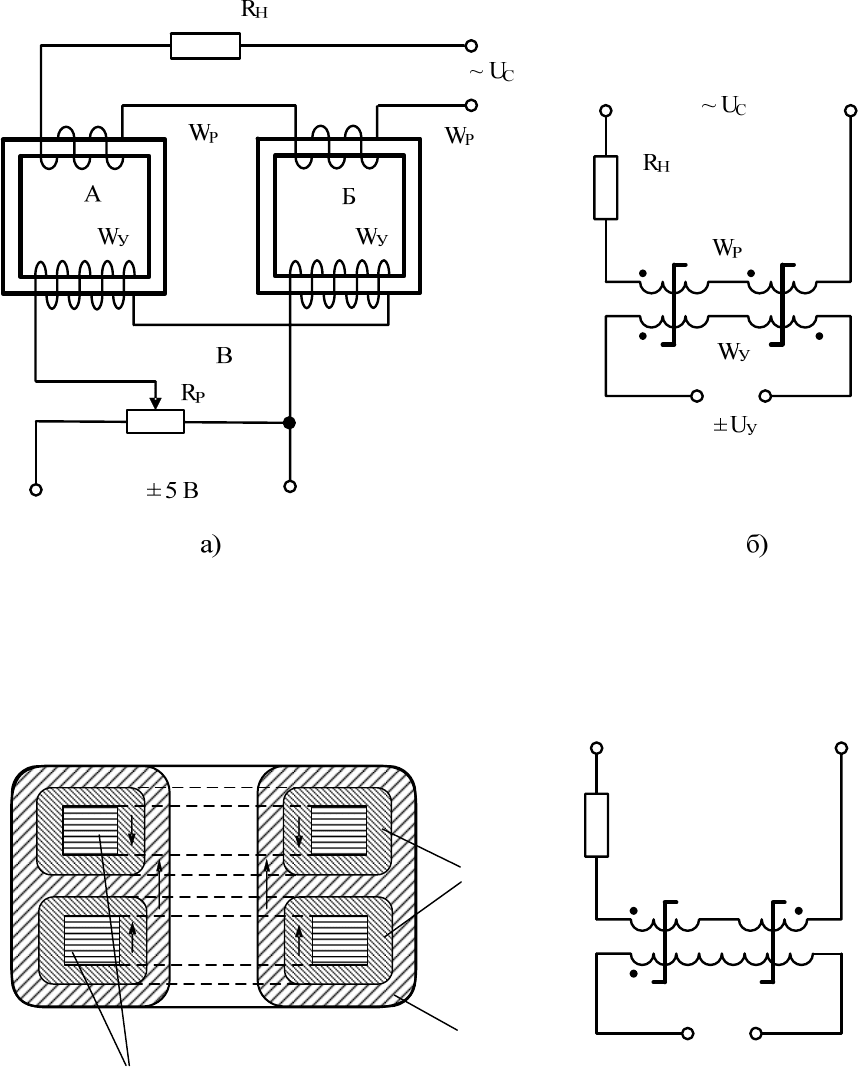
При возрастании постоянного тока управления возрастает вызванная им
постоянная составляющая напряженности магнитного поля в сердечни-
ке, а значит в соответствии с кривой ()
f
H
μ
=
на рис. 1 магнитная про-
ницаемость материала уменьшается, индуктивность падает, а ток в ра-
бочей цепи растёт. Зависимость проницаемости материала и индуктив-
ности от тока управления показана на рис. 3 [2].
Рис. 3
1.3. Рассмотренная схема МУ не нашла применения на практике, по-
скольку имеет ряд существенных недостатков, в частности, вследствие
взаимоиндукции происходит трансформация переменного напряжения в
цепь управления, что искажает входной сигнал и нарушает нормальную
работу усилителя, коэффициент усиления такого МУ мал и др. [1].
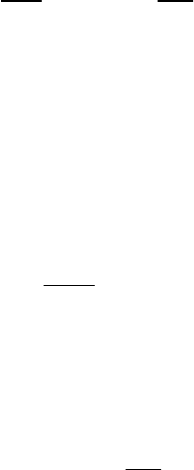
Для исключения наведения ЭДС в обмотках управления применя-
ют
схему МУ на двух сердечниках (рис. 4). Переменный магнитный по-
14
ток Ф наводит равные ЭДС в секциях обмотки управления, а т.к. секции
включены встречно, индуктируемые ЭДС будут взаимоуничтожаться.
Рис. 4
Конструктивно чаще выполняют обмотку управления общей, а ра-
бочую обмотку – двухсекционной, причем секции последней соединяют
встречно и охватывают общей обмоткой управления (рис. 5).
W
У
W
Р
Магнитопровод
а)
± U
У
W
У
~ U
С
R
Н
W
Р
б)
Рис. 5
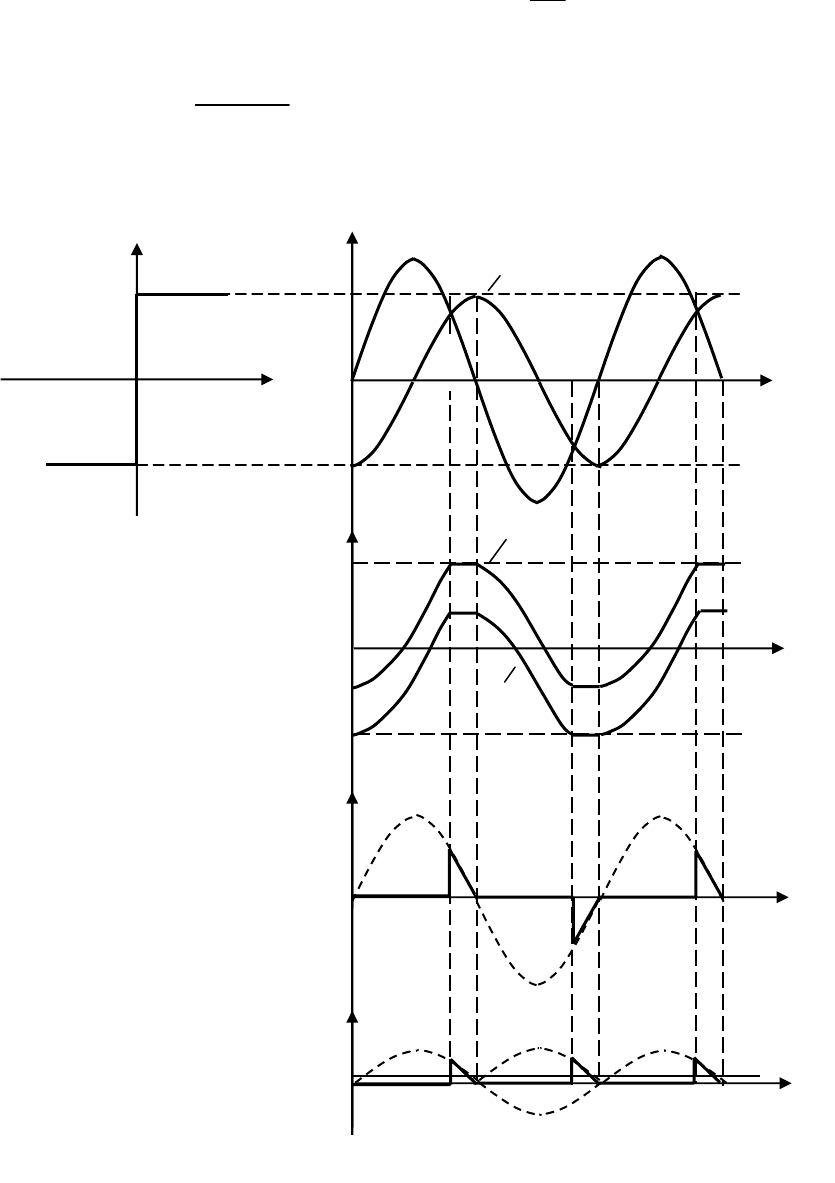
1.4. Рассмотрим работу схемы рис. 4, приняв для упрощения, что
ферромагнитный сердечник имеет идеальную кривую намагничивания
15
(рис. 6, а). В этом случае магнитная проницаемость сердечника и индук-
тивность обмоток могут принимать лишь два значения: на вертикаль-
ном отрезке кривой намагничивания
μ
=
∞ ,
L
=
∞ ; на горизонтальных
отрезках –
0
μ
= , 0
L
= .
Сначала рассмотрим работу схемы при отсутствии сигнала управ-
ления. Положим, что напряжение источника питания изменяется по си-
нусоидальному закону (рис. 6, б)
sin( )
Cm
UU t
ω
=
⋅⋅. (5)
Переменное напряжение вызывает ток, который, протекая по об-
моткам W
р
, создает магнитные потоки в обоих сердечниках.
Потоки индуцируют ЭДС в секциях рабочей обмотки и обмотки
управления, причем вследствие встречного включения секций послед-
ней наведенные ЭДС в них компенсируются.
Согласно второму закону Кирхгофа напряжение сети
C
U уравно-
вешивается падением напряжения на сопротивлении нагрузки
H
R
и на-
пряжением
L
U , компенсирующим ЭДС е:
CHLH
UiRUiRе=⋅ + =⋅ −. (6)
Как известно, наведенная ЭДС пропорциональна изменению пото-
ка в магнитопроводе:
dФ dВ
е WWS
dt dt
=− ⋅ =− ⋅ ⋅ , (7)
где W – число витков рабочей обмотки W = 2·W
р
;
S – площадь сечения магнитопровода;
В – индукция магнитного поля.
Если магнитопровод не насыщен, то его состояние описывается
вертикальным отрезком кривой намагничивания, когда напряженность
магнитного поля 0=
H
. В соответствии с законом полного тока
iW
Н
l
⋅
= , (8)
где l – длина магнитопровода. Тогда и ток i = 0.
С учётом равенства нулю составляющей
H
iR
⋅
в выражении (6) мо-
жем записать
C
dB
U е WS
dt
=
−= ⋅ ⋅ ,
а с учетом (5)
16
sin( )
m
dB
UtWS
dt
ω
⋅
⋅= ⋅⋅ . (9)
Интегрируя обе части уравнения (9) получим
00
cos( ) cos( )
m
m
U
В
tB B tB
WS
ωω
ω
=− ⋅ ⋅ + =− ⋅ ⋅ +
⋅⋅
, (10)
где В
0
– постоянная интегрирования, представляющая собой посто-
янную составляющую магнитной индукции;
α
2
α
1
г)
в)
б)
I
Д
i
У
i
Р
B
0
0
0
0
B
Б
B
А
ωt
ωt
ωt
ωt
B
А
= B
Б
U
С
д)
0
-B
S
B
S
H
B
а)
Рис. 6

17
m
m
U
В
WS
ω
=
⋅⋅
– амплитудное значение переменной составляющей
магнитной индукции.
Если выбрать напряжение питания равным
mS
UWSB
ω
=
⋅⋅⋅,
то индукция в обоих сердечниках будет одинаковой и не превышающей
индукции насыщения В
S
(рис. 6, б):
cos( )
АБ S
В
ВВ t
ω
==−⋅ ⋅
. (11)
Ток в цепи нагрузки при этом равен нулю (см. (8)). В реальном МУ
и при отсутствии сигнала управления будет протекать ток – ток холо-
стого хода (намагничивания); он будет тем больше, чем более реальная
кривая намагничивания (рис. 1) будет отличаться от идеальной кривой
(рис. 6, а).
Предположим, что к обмотке управления приложено напряжение.
Тогда в обмотке потечет ток, и от него в каждом сердечнике появится
постоянная составляющая индукции В
0
, причем из-за встречного вклю-
чения секций обмотки управления эти составляющие будут иметь раз-
личные направления. В этом случае результирующая индукция в сер-
дечниках
0
0
cos( ) ;
cos( ) .
А m
Б m
В
В tB
В
В tB
ω
ω
=− ⋅ ⋅ +
=− ⋅ ⋅ −
(12)
Таким образом, кривая В
А
должна подняться над осью абсцисс на
величину В
0
, а кривая В
Б
– опуститься на ту же величину. Однако, при
определенном значении фазы (
ω
·t =
α
1
), когда индукция в сердечнике А
достигает значения индукции насыщения В
S
, дальнейший рост её пре-
кращается, а значит, скорость её изменения станет равна нулю: dB
A
/dt =
0. При этом ЭДС в обмотках сердечника А индуцироваться не будут,
т.е. е
А
= 0; е
уА
= 0.
Сердечник Б в это время не насыщен, но индуктивные сопротивле-
ния обмоток сердечника А стали равны нулю, и ЭДС, индуктируемая в
обмотке управления W
уБ
от тока в рабочей обмотке уже не компенсиру-
ется встречной ЭДС и оказывается замкнутой на контур с сопротивле-
нием, равным нулю (если пренебречь сопротивлением источника на-
пряжения управления). В этом контуре возникает большой ток, проти-
водействующий изменению потока. Следовательно, индукция в сердеч-
нике Б тоже остается постоянной на протяжении всего
интервала насы-
щения сердечника А, а значит е
Б
= 0.
18
При
ω
·t =
π
напряжение питания меняет свою полярность, а индук-
ция начинает убывать.
В дальнейшем процесс повторяется, но в каждый полупериод сер-
дечники меняются ролями (рис. 6, в).
В течение интервала времени, когда один из сердечников насыщен,
все напряжение прикладывается к нагрузке, а рабочий ток определяется
сопротивлением
H
R
(рис.6, г):
sin( )
C
Pm
H
U
iIt
R
ω
=
=⋅ ⋅. (13)
По мере увеличения тока управления насыщение наступает все
раньше, угол отсечки α (α
1
на рис. 6, б) уменьшается, в больший про-
межуток времени нагрузка подключена к сети, соответственно увеличи-
вается действующее значение тока в нагрузке. Максимального значения
ток достигнет, когда индукция В
0
станет равной индукции насыщения
В
S
, при дальнейшем увеличении сигнала управления ток нагрузки не
изменится.
Регулировочная характеристика может быть получена из закона
полного тока для ненасыщенного сердечника при насыщении второго.
Напряженность поля в нём создается двумя токами: i
Р
и i
у
, а т.к. он не
насыщен, то в соответствии с рис. 6, а суммарная напряженность поля в
нем равна нулю. Тогда
0
РРУУ
iW iW
Н
ll
⋅
⋅
=+=.
Отсюда
;
.
Р
РУУ
У
РУ
Р
iW iW
W
ii
W
⋅
=− ⋅
=− ⋅
(14)
Во время следующего полупериода
0
РРУУ
iW iW
Н
ll
⋅
⋅
=−=;
;
.
Р
РУ У
У
РУ
Р
iW iW
W
ii
W
⋅
=⋅
=⋅
(15)
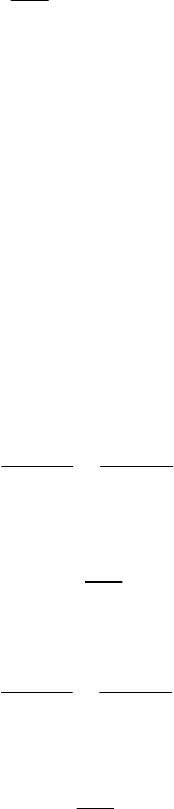
На основании этих выражений можно построить график изменения
тока в цепи управления (рис. 6, д), а также построить регулировочную
характеристику идеального МУ, которая представляет собой линейную
функцию до определенного значения тока управления (пунктирная ли-
ния на рис. 7). При этом рабочий ток достигает тока насыщения I
Рнас
.
Угол наклона характеристики представляет собой коэффициент усиле-
19
ния МУ по току и определяется в соответствии с (14) и (15) соотноше-
нием числа витков обмотки управления и рабочей обмотки.
Характеристика реального МУ будет несколько отличаться, в част-
ности наличием тока холостого хода I
0
(сплошная линия на рис. 7).
1.5. Степень усиления входного сигнала МУ характеризуется сле-
дующими параметрами (для линейного участка):
•
коэффициент усиления (КУ) по току
Р
У
i
УР
I
W
к
I
W
Δ
==
Δ
; (16а)
Рис. 7
• КУ по напряжению
НРНУН
u
УУУРу
UIRWR
к
UIrWr
Δ
Δ⋅
== =⋅
ΔΔ⋅
; (16б)
•
КУ по мощности
2
2
2
В
ЫХ Р Н У Н
Р iu
УУУРу
PIRWR
ккк
PIrWr
⎛⎞
ΔΔ⋅
=⋅= = = ⋅
⎜⎟
ΔΔ⋅
⎝⎠
, (16в)
где
U
Н
– напряжение на нагрузке;
P
ВЫХ
– выходная мощность на нагрузке;
r
У
– сопротивление цепи управления усилителя.
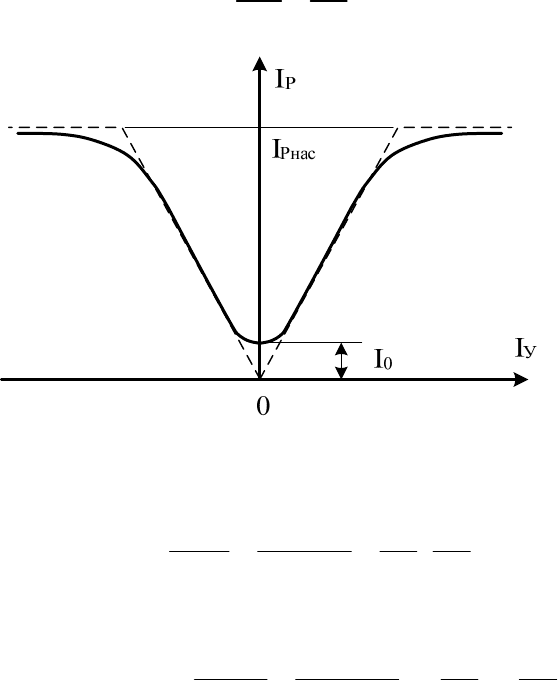
1.6. Для увеличения коэффициента усиления в МУ применяется
обратная связь (ОС). Различают внешнюю, внутреннюю и смешанную
ОС МУ.
При введении внешней ОС рабочий ток усилителя выпрямляется и
подается в специальную обмотку обратной связи, конструктивно распо-
20
ложенную там же, где и обмотка управления (рис. 8). Выпрямленный
ток пропорционален току в нагрузке; протекая по обмотке, он создает
дополнительный поток в сердечнике, направление которого определяет-
ся подключением обмотки. При одной полярности напряжения управ-
ления потоки управления и ОС складываются, а ОС является положи-
тельной, при другой – вычитаются, а ОС – отрицательная
.
W
ОС
±
U
У
W
У
~ U
С
R
Н
W
Р
W
Р
VD
Рис. 8
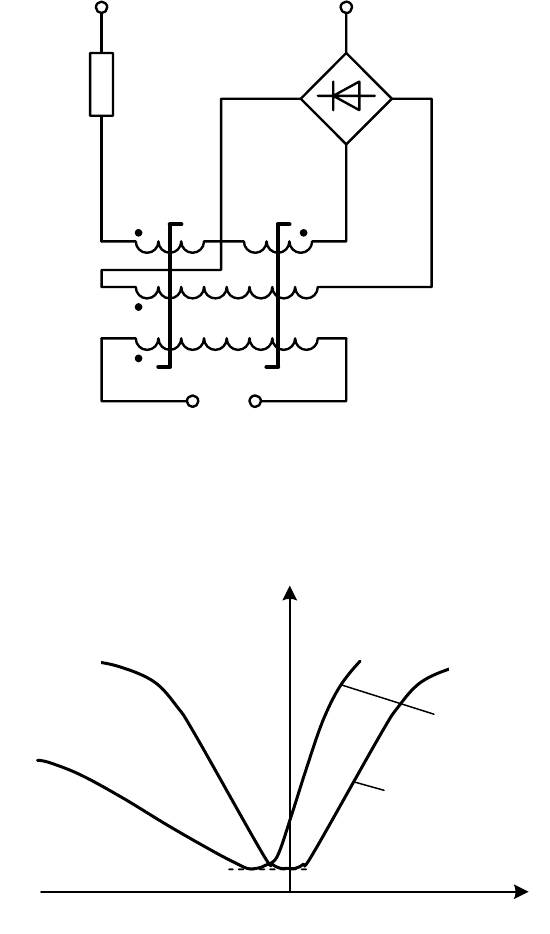
Статическая характеристика МУ с внешней ОС показана на рис. 9
[1, 2].
H
1
2
0
1 – характеристика МУ без ОС;
2 – характеристика МУ с внешней ОС
B
Рис. 9