Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.


Защищенные области
3.1 Определение защищенных областей (CPROTDEF, NPROTDEF)
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
231
Граничные условия
При определении защищенных областей не может быть активных
• коррекции радиуса фрезы или коррекции радиуса резца,
• трансформации,
• фреймов.
Также не может быть запрограммировано реферирования (G74), движения к
фиксированной точке (G75), останова покадровой обработки или конец программы.
Дополнительная информация
Определение защищенных областей
К определению защищенных областей относятся:
• CPROTDEF для спец. для канала защищенных областей
• NPROTDEF для спец. для станка защищенных областей
• Описание контура защищенной области
• Завершение определения с EXECUTE
При активации защищенной области в программе обработки детали ЧПУ возможно
относительное смещение исходной точки защищенной области.
Исходная точка описания контура
Относящиеся к детали защищенные области определяются в базовой кинематической
системе.
Относящиеся к инструменту защищенные области указываются относительно исходной
точки инструментального суппорта F.
Допустимые элементы контура
Для описания контура защищенной области разрешены:
• G0, G1 для прямых элементов контура
• G2 для круговых сегментов по часовой стрелке (только для относящихся к детали
защищенных областей)
• G3 для круговых сегментов против часовой стрелки
Примечание
Если полный круг описывает защищенную область, то он должен быть разделен на
две делительные окружности. Последовательность G2, G3 или G3, G2 не
допускается. При необходимости вставить здесь короткий кадр G1.
Последняя точка описания контура должна совпадать с первой точкой.
Защищенные области
3.1 Определение защищенных областей (CPROTDEF, NPROTDEF)
Расширенное программирование
232 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Наружные защищенные области
Наружные защищенные области (возможно только для относящихся к детали
защищенных областей) должны определяться по часовой стрелке .
Вращательно-симметричные защищенные области
Для вращательно-симметричных защищенных областей (к примеру, патрон шпинделя),
требуется описание всего контура (не только до центра вращения!).
Относящиеся к инструменту защищенные области
Относящиеся к инструменту защищенные области всегда должны быть выпуклыми.
Если необходима вогнутая защищенная область, то необходимо разбить его на
несколько выпуклых защищенных областей.
)
̩͕͔͚͙͎͇͊͌͢͠͏͔͔͕͈͇͙͌͌͒͘͢͠͏͎͇͖͔͕͗͌͌͠
̩͖͚͎͇͑͒͌͢͢͠͏͔͔͕͈͇͙͌͌͒͘͢͠͏
Защищенные области
3.2 Активация/деактивация защищенных областей (CPROT, NPROT)
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
233
3.2 Активация/деактивация защищенных областей (CPROT, NPROT)
Функция
Активировать, предварительно активировать определенные ранее защищенные
области для контроля столкновений, или деактивировать активные защищенные
области.
Макс. число одновременно активных в канале защищенных областей определяется
через машинные данные.
Если нет активной относящейся к инструменту защищенной области, то траектория
инструмента проверяется по отношению к относящемся к детали защищенным
областям.
Синтаксис
CPROT(<n>,<state>,<xMov>,<yMov>,<zMov>)
NPROT(<n>,<state>,<xMov>,<yMov>,<zMov>)
Значение
Граничные условия
Контроль защищенной области при активной коррекции радиуса инструмента
При активной коррекции радиуса инструмента работоспособный контроль защищенной
области возможен только в том случае, если плоскость коррекции радиуса инструмента
идентична плоскости определения защищенной области.
Примечание
Если нет активной относящегося к детали защищенной области, но контроль
защищенной области не выполняется.
CPROT: Вызов спец. для канала защищенной области
(только для NCU 572/573)
NPROT: Вызов спец. для станка защищенной области
<n>: Номер защищенной области
<state>: Указание состояния
0: Деактивировать защищенную область
1: предварительная активация защищенной
области
2: Активировать защищенную область
3: Предварительно активировать защищенную
область с условным остановом
<xMov>,<yMov>,<zMov>: Сместить уже определенную защищенную область в
геометрических осях
Защищенные области
3.2 Активация/деактивация защищенных областей (CPROT, NPROT)
Расширенное программирование
234 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
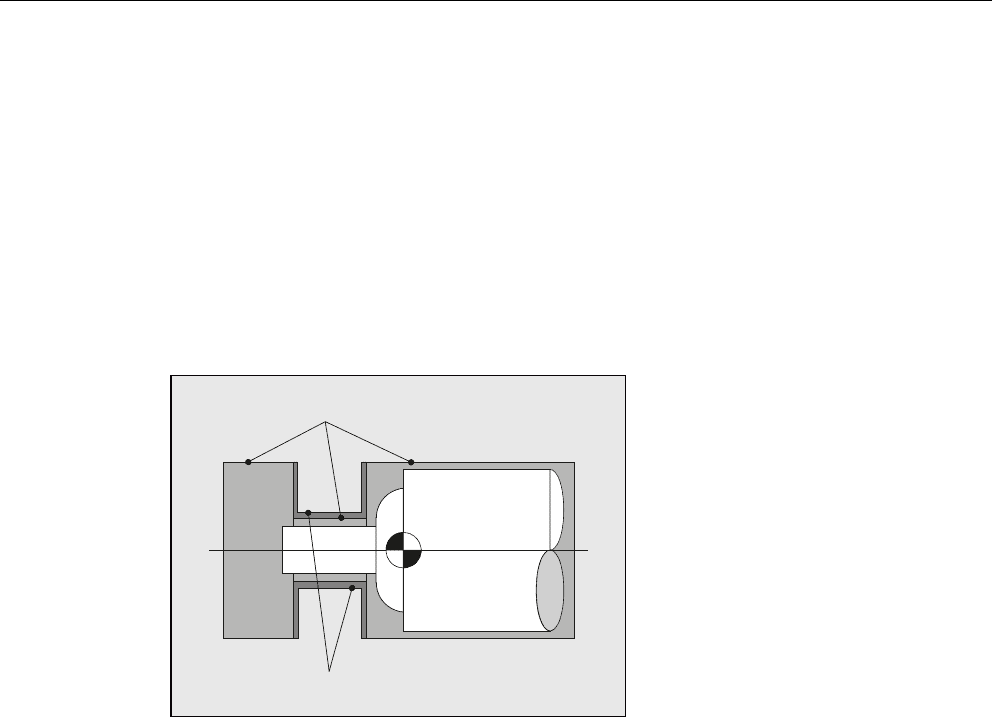
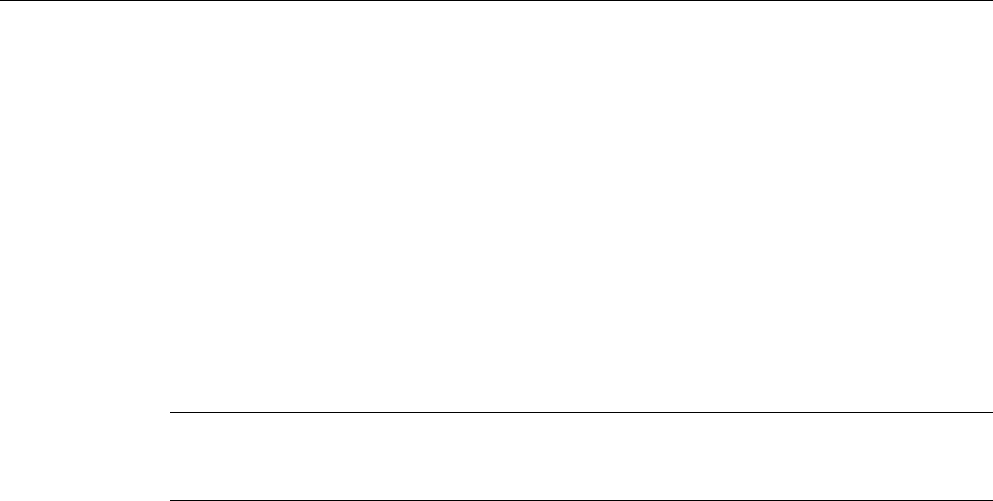
Пример
Для фрезерного станка необходимо контролировать возможное столкновение фрезы с
измерительным щупом. Положение измерительного щупа при активации должно быть
указано через смещение. Для этого определяются следующие защищенные области:
• Соответственно по одной спец. для станка и относящейся к детали защищенной
области для держателя измерительного щупа (n-SB1) и самого измерительного
щупа (n-SB2).
• соответственно по одной спец. для станка и относящейся к детали защищенной
области для держателя фрезы (c-SB1), хвостовика фрезы (c-SB2) и самой фрезы (c-
SB3).
Ориентация всех защищенных областей лежит в направлении Z.
Положение исходной точки измерительного щупа при активации должно находиться на
X = -120, Y = 60 и Z = 80.
Программный код Комментарий
DEF INT SCHUTZB ; Определение вспомогательной переменной
Определение защищенных областейG17 ; Установить ориентацию
NPROTDEF(1,FALSE,3,10,–10)G01 X0 Y–10
X40
Y10
X0
Y–10
EXECUTE(SCHUTZB)
; Защищенная область n–SB1
NPROTDEF(2,FALSE,3,5,–5)
G01 X40 Y–5
X70
Y5
X40
Y–5
EXECUTE(SCHUTZB)
; Защищенная область n–SB2
̯͕͔͇͙͕͇͋ͦ͑͋͒ͦ͘͜͞
͎͇͠͏͔͔͕͕͈͇͙͌͐͒͘͠͏
͏͎͓͌͗͏͙͔͕͕͚͖͇͌͒ͣ͊͠
&6%
&6%
&6%
;
=
<
Q6%
Q6%
Защищенные области
3.2 Активация/деактивация защищенных областей (CPROT, NPROT)
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
235
Дополнительная информация
Состояние активации (<state>)
•<state>=2
Общая активация защищенной области выполняется в программе обработки детали
с состоянием = 2.
Состояние всегда является спец. для канала, и в случае относящихся к станку
защищенных областей.
•<state>=1
Если через программу электроавтоматики предусмотрено, что защищенная область
может быть активирована через программу электроавтоматики, то необходимая для
этого предварительная активация выполняется через состояние = 1.
CPROTDEF(1,TRUE,3,0,–100)
G01 X–20 Y–20
X20
Y20
X–20
Y–20
EXECUTE(SCHUTZB)
; Защищенная область c–SB1
CPROTDEF(2,TRUE,3,–100,–150)
G01 X0 Y–10
G03 X0 Y10 J10
X0 Y–10 J–10
EXECUTE(SCHUTZB)
; Защищенная область c–SB2
CPROTDEF(3,TRUE,3,–150,–170)
G01 X0 Y–27,5
G03 X0 Y27,5 J27,5
X0 Y27,5 J–27,5
EXECUTE(SCHUTZB)
; Защищенная область c–SB3
Активация защищенных областей:
NPROT(1,2,–120,60,80) ; Активировать защищенную область n–SB1
со смещением
NPROT(2,2,–120,60,80) ; Активировать защищенную область n–SB2
со смещением
CPROT(1,2,0,0,0) ; Активировать защищенную область c–SB1
со смещением
CPROT(2,2,0,0,0) ; Активировать защищенную область c–SB2
со смещением
CPROT(3,2,0,0,0) ; Активировать защищенную область c–SB3
со смещением
Программный код Комментарий

Защищенные области
3.2 Активация/деактивация защищенных областей (CPROT, NPROT)
Расширенное программирование
236 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
•<state>=3
При предварительной активации с условным остановом, остановка перед
нарушенной, предварительно активированной защищенной областью выполняется
не всегда. Остановка выполняется только в том случае, если защищенная область
была активирована. Это обеспечивает беспрерывную обработку, если защищенные
области активируются только в особых случаях. Учитывать, что вследствие рампы
торможения возможен заход в защищенную область, если защищенная область
активирована непосредственно перед подводом.
Предварительная активация с условным остановом выполняется через состояние =3.
•<state>=0
Деактивация и тем самым отключение защищенных областей осуществляется через
состояние = 0. Смещение при этом не требуется.
Смещение защищенных областей при (предварительной) активации
Смещение может выполняться в 1, 2 или 3 размерностях. Указание смещения
относится к:
• нулевой точке станка для спец. для детали защищенных областей,
• исходной точке инструментального суппорта F для спец. для инструмента
защищенных областей.
Состояние после запуска
Защищенные области могут быть активирована уже после запуска с последующим
реферированием. Для этого системные переменные $SN_PA_ACTIV_IMMED[<n>] или
$SC_PA_ACTIV_IMMED[<n>] должны быть установлены на TRUE. Они всегда
активируются с состоянием = 2 и не имеют смещения.
Многократная активация защищенных областей
Одна защищенная область может одновременно действовать и в нескольких каналах (к
примеру, пиноль при двух противолежащих салазках). Контроль защищенных областей
выполняется только в том случае, если все гео-оси реферированы.
При этом действует:
• Защищенная область в одном канале не может быть одновременно многократно
активирована с различными смещениями.
• Относящиеся к станку защищенные области должны иметь одинаковую ориентацию
в обоих каналах.

Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
237
3.3 Проверка нарушения защищенной области, ограничения рабочего
поля и программных лимитов (CALCPOSI)
Функция
Функция CALCPOSI служит для проверки того, могут ли гео-оси, исходя из имеющейся
стартовой точки, пройти заданный маршрут, не нарушив границ осей (программные
лимиты), ограничения рабочего поля и защищенные области.
В том случае, когда заданный маршрут не может быть пройден, возвращается макс.
допустимое значение.
Функция CALCPOSI это предопределенная подпрограмма. Она должна стоять одна в
кадре.
Синтаксис
Состояние=CALCPOSI(_STARTPOS, _MOVDIST, _DLIMIT, _MAXDIST,
_BASE_SYS, _TESTLIM)
Значение
Состояние
0: функция o. k.,
заданный маршрут может быть полностью пройден.
–: в _DLIMIT как минимум один компонент отрицательный
–: в расчете трансформации возникла ошибка
Если заданный маршрут не может быть пройден полностью, то
выводится положительное значение в десятичной кодировке:
Первая позиция (тип нарушенной границы):
1: программные лимиты ограничивают путь перемещения.
2: ограничение рабочего поля ограничивает путь перемещения.
3: защищенные области ограничивают путь перемещения.
Если одновременно нарушено несколько границ (к примеру,
программные лимиты и защищенные области), то в первой позиции
сигнализируется граница, ведущая к самому значительному
ограничению заданного пути перемещения.
Вторая позиция
10:
начальное значение нарушает границу
20:
Заданная прямая нарушает границу. Это значение возвращается и
тогда, когда сама конечная точка не нарушает границы, но на пути от
стартовой к конечной точке возникло бы нарушение предельного
значения (к примеру, переход через защищенную область, изогнутые
программные лимиты в WCS при не линейных трансформациях, к
примеру, Transmit).

Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
238 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Третья позиция
100:
положительное предельное значение нарушено (только если первая
позиция 1 или 2, т.е. при программных лимитах и ограничении рабочего
поля)
100:
нарушена защищенная область NCK (только, если первая позиция 3).
200:
отрицательное предельное значение нарушено (только если первая
позиция 1 или 2, т.е. при программных лимитах и ограничении рабочего
поля)
200:
нарушена спец. для канала защищенная область (только, если первая
позиция 3).
Четвертая позиция
1000:
коэффициент, на который умножается номер оси, которая нарушает
границу (только если первая позиция 1 или 2, т.е. при программных
лимитах и ограничении рабочего поля).
Подсчет осей начинается на 1 и относится при нарушенных
программных лимитах (первая позиция = 1) к осям станка, а при
нарушенном ограничении рабочего поля (первая позиция =2) к гео-осям.
1000:
коэффициент, на который умножается номер нарушенной защищенной
области (только, если первая позиция 3).
Если нарушено несколько защищенных областей, то на третьей и
четвертой позиции сигнализируется защищенная область, ведущая к
самому значительному ограничению заданного пути перемещения.
_STARTPOS
Начальное значение для абсциссы [0], ординаты [1] и аппликаты [2] в
(WCS)
_MOVEDIST
Инкрементальное заданное перемещение для абсциссы [0], ординаты [1]
и аппликаты [2]
_DLIMIT
[0] - [2]: минимальные интервалы, присвоенные гео-осям.
[3]: мин. интервал, который назначается линейной оси станка при не
линейной трансформации, если гео-ось не может быть согласована
однозначно.
[4]: мин. интервал, который назначается круговой оси станка при не
линейной трансформации, если гео-ось не может быть согласована
однозначно. Только для специальных трансформаций, если необходим
контроль программных лимитов.
_MAXDIST
Поле [0] - [2] для возвращаемого значения. Инкрементальное
перемещение во всех трех гео-осях, без которого происходит
отрицательное превышение заданного мин. интервала от границы оси в
участвующих осях станка.
Если путь перемещения не ограничен, то содержание этого
возвращаемого параметра идентично содержанию _MOVDIST.

Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
239
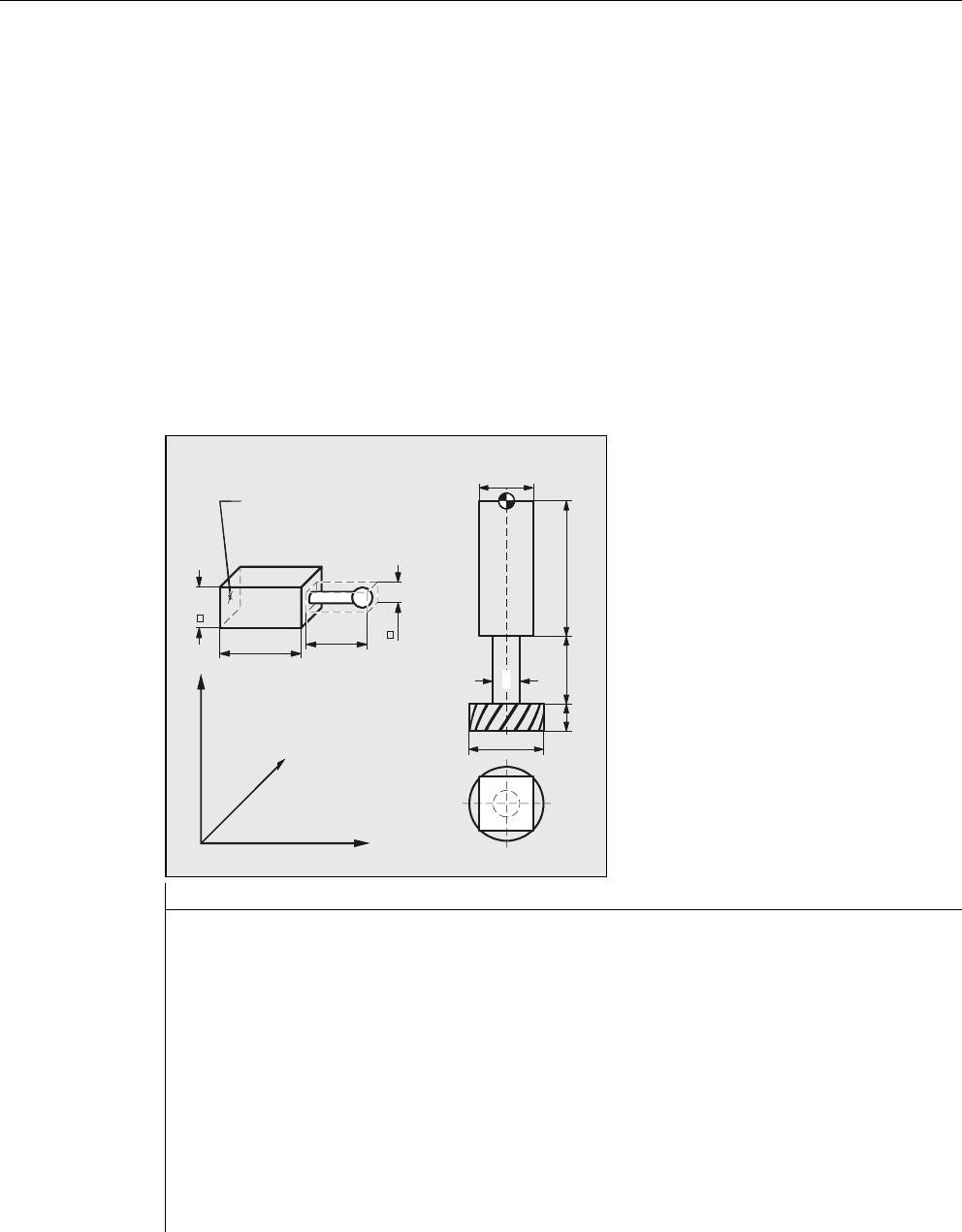
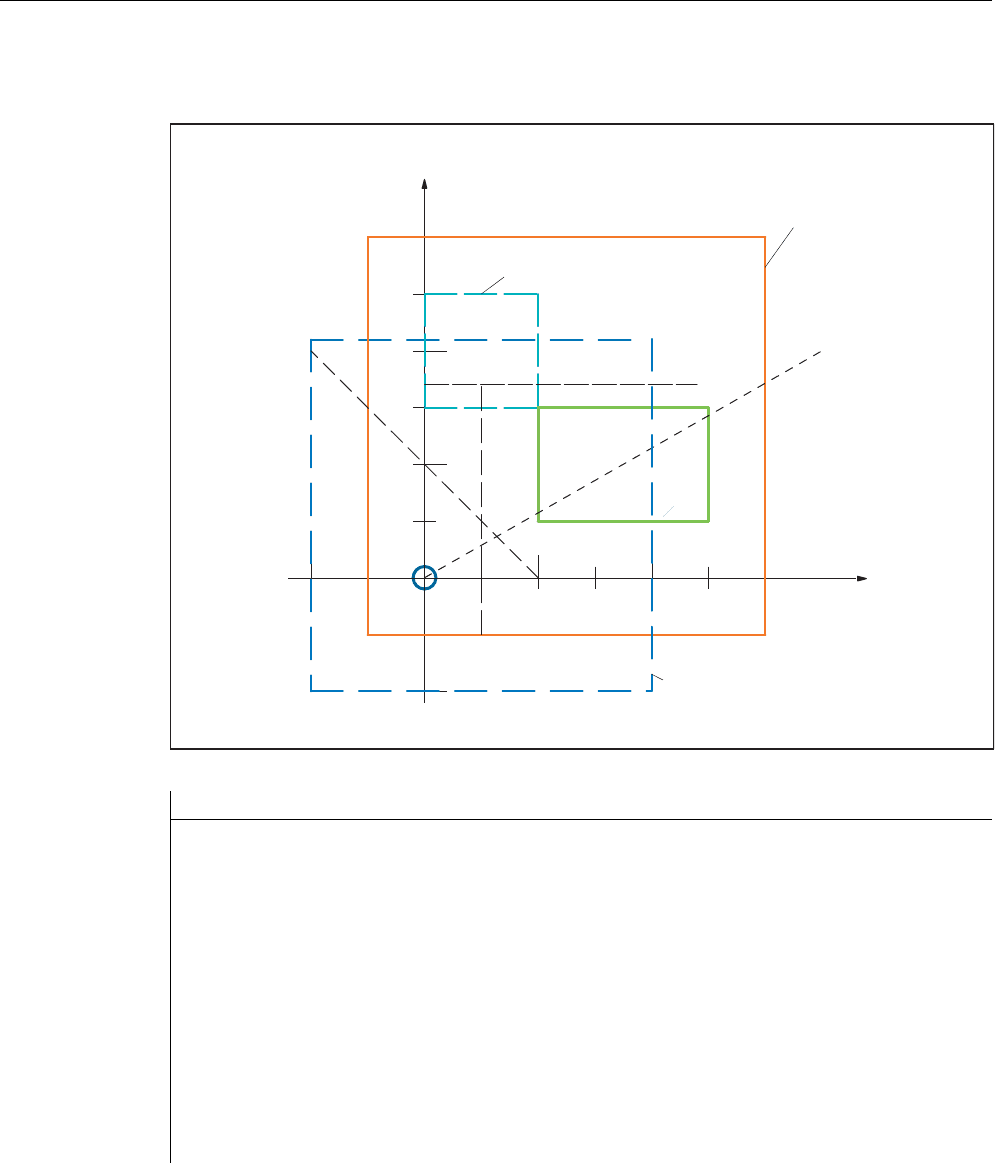
Пример
В примере (см. рис.) в Х показаны программные лимиты и ограничения рабочего поля.
Дополнительно определено три защищенные области, обе спец. для канала
защищенные области C2 и C4, а также защищенная область NCK N3. C2 это круговая
активная относящаяся к инструменту защищенная область с радиусом 2 мм. C4 это
квадратная, предварительно активированная и относящаяся к детали защищенная
область с длиной стороны 10 мм и N3 это прямоугольная активная защищенная
область с длиной стороны 10 мм и 15 мм. В следующем ЧПУ защищенные области и
ограничения рабочего поля сначала определяются как на рисунке, а после функция
_BASE_SYS
FALSE или параметр не указан:
При нормировании данных позиций и длин обрабатывается код G группы
13 (G70, G71, G700, G710; дюймовый/метрический). При активном G70 и
метрической основной системе (или активной G71 и дюймовой)
системные переменные WСS $AA_IW[X] и $AA_MW[X]) выводятся в
основной системе и при необходимости для использования должны быть
пересчитаны через функцию CALCPOSI.
TRUE:
При нормировании данных позиций и длин всегда используется
основная система СЧПУ, независимо от значения активного G группы 13.
_TESTLIM
Проверяемые ограничения (двоичная кодировка):
1: контролировать программные ограничения
2: контролировать ограничения рабочего поля
3: контролировать активированные защищенные области
4: контролировать предварительно активированные защищенные
области
Комбинации через сложение значений. По умолчанию: 15; проверять
все.
Защищенные области
3.3 Проверка нарушения защищенной области, ограничения рабочего поля и программных лимитов
Расширенное программирование
240 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
CALCPOSI вызывается с различными параметрированиями. Результаты отдельных
вызовов CALCPOSI объединены в таблице в конце примера.
Программный код Комментарий
N10 def real _STARTPOS[3]
N20 def real _MOVDIST[3]
N30 def real _DLIMIT[5]
N40 def real _MAXDIST[3]
N50 def int _SB
N60 def int _STATUS
N70 cprotdef(2, true, 0)
N80 g17 g1 x–y0
N90 g3 i2 x2
N100 i–x–
N110 execute(_SB)
; Относящаяся к инструменту
защищенная область
<
;
11
1
1
1
&
&
̶͕͇͓͓͔͗͊͗͌͒͢͏͓͏͙͢
̵͇͔͊͗͏͔͌͞͏͇͈͕͕͖͕͌͗͌͊͒ͦ͞
͖͉͇͗͌͋͗͏͙͔͕͌͒ͣ
͇͙͑͏͉͏͕͉͇͔͕͗