Richard S. Gallagher. Computer Visualization: Graphics Techniques for Engineering and Scientific Analysis
Подождите немного. Документ загружается.

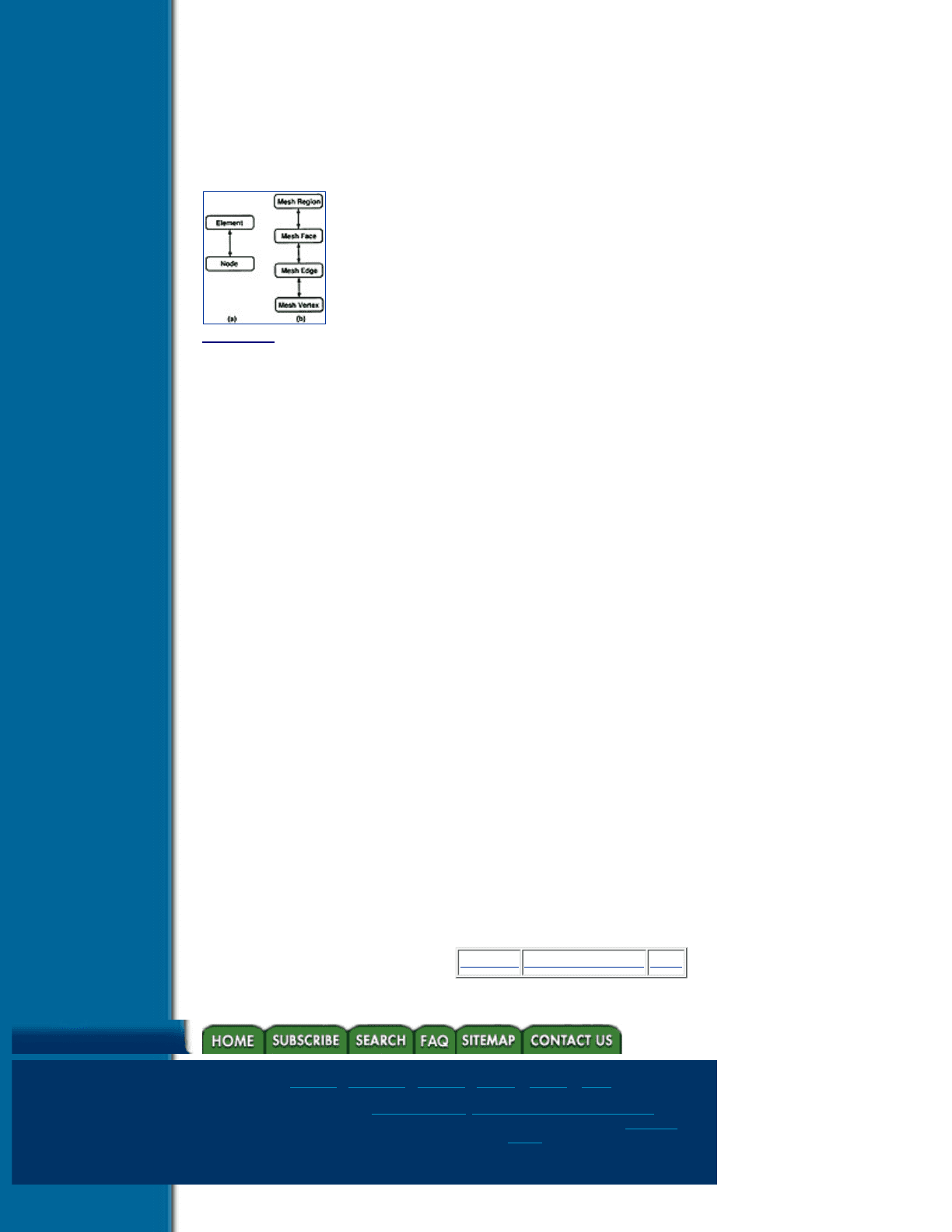
original geometric model [19, 21]. Classification information is the hook that allows mapping problem
specifications in terms of geometry to a discretized computational model, and then back again to visualize
results. Adjaceny information is the relationship in terms of physical proximity and order of one topological
entity to another. An example of one adjacency relationship is the group of faces in cyclic order around an
edge. Use information is a modeling convenience that specifies the way one topological entity is used in the
definition of another; (e.g., the direction or orientation of the defining topology). Both adjacency and use
information are useful in complex analytical problems such as evolving geometry, where boundary contact
occurs and modification to the underlying geometric representation is required.
Figure 3.7 Traditional mesh structure (a) and hierarchical structure(b).
3.6.2 Data Representation
As described previously the results data from a finite element analysis may consist of scalar (zero order
tensor), vector (1st order tensors), or tensor information. The location of this information may be on element
nodes, within the element at interior points, or possibly on the element boundary.
The hierarchical mesh geometry representation is a convenient structure in which to house this information.
Scalar, vector, or tensor data located at element nodes is associated with the mesh vertices. Surface or edge
fluxes are associated with the faces or edges. Interior element data are associated with the region. In some
cases the interior element data may be extrapolated to, and stored with, the mesh vertices.
A particularly important issue is the native representational form of the analysis results. That is, if the analysis
system generates results in double precision form, the visualization system should represent data in native
form as well. This is particularly important when the results are of small size (byte or short), since
representing a small type with a large type can unnecessarily consume enormous memory resources. Related
to this issue is computational form: visualization algorithms should use enough accuracy to produce correct
visualizations.
Probably the overriding issue in representing analysis results is choosing a compact representational form.
Since the expressed purpose of visualization is to effectively communicate information, visualization systems
are most effective when they can treat large data.
3.7 Mapping Analysis Results to Visualizations
Producing visualizations requires mapping results data into visual representations. Typical procedures involve
either sampling the results data on a regular grid (i.e., volume visualization), or conversion of analytical forms
(nodes and elements) into graphical forms (points, lines, polygons). Once this mapping is accomplished, the
techniques described in later chapters of this book are applied to generate the visual images. The remainder of
this chapter provides an overview of the mapping from results data into forms necessary for visualization.
Particular emphasis is placed on the approximations and potential errors involved in the mapping process.
Previous Table of Contents Next
Products | Contact Us | About Us | Privacy | Ad Info | Home
Use of this site is subject to certain Terms & Conditions, Copyright © 1996-2000 EarthWeb Inc. All rights
reserved. Reproduction whole or in part in any form or medium without express written permission of
EarthWeb is prohibited. Read EarthWeb's privacy statement.
Search Tips
Advanced Search
Computer Visualization: Graphics Techniques for Engineering and Scientific Analysis
by Richard S. Gallagher. Solomon Press
CRC Press, CRC Press LLC
ISBN: 0849390508 Pub Date: 12/22/94
Search this book:
Previous Table of Contents Next
3.7.1 Extrapolation and Interpolation
Because of the nature of engineering analysis, solution data is available at a finite set of points within the
computational mesh. Primary solution variables are typically available at node points of the mesh, while
secondary variables are often calculated at points interior to the element where they are known to be more
accurate. The discrete nature of solution data is of major concern in the visualization process, because
information is frequently required at locations other than that directly available from the solution. Hence this
information must be derived by performing both interpolation or extrapolation, depending upon the location
of the solution data. Generally this mapping process requires an intimate knowledge of the analysis technique,
and should be carried out using the same element approximation functions used for formulation of the system
equations.
Extrapolation is used when results data is available interior to mesh elements, and a data value is desired in
outer regions such as element node locations. Results data is frequently available only at select interior points,
because solution accuracy is known to be greatest there. Extrapolating stresses from integration points to
element nodes is a typical example.
A simple extrapolation scheme is based on normalizing the element shape functions so that the integration
points are located at the corners (i.e., at ¾ =(±1)), and then evaluating the data at the element node points.
Another common extrapolation scheme is based on the least squares process. Typically, interior values are
known interior to an element on a small array of points (e.g., 2 × 2 × 2 or 3 × 3 × 3) located in the parametric
space of the element. Stresses are assumed to vary as a product of low order polynomials (usually linear or
quadratic), and the least squares coefficients are generated from the integration point values and evaluated at
the element nodes.
There are two major difficulties with extrapolation. When extrapolating from the element interior to the node
points, different values for each node will be generated from each of the elements that use that node. The
usual approach in this situation is to average the contributions from each element to generate a single value.
Extrapolation may also produce errors as a result of the difference between the order of the approximation
function in the element and the actual physics of the problem. In elliptic partial differential equations the
maximum value will always occur at the domain boundary and extrapolation techniques produce results that
underestimate peak values. Analytic solutions of stress concentrations around geometric features clearly show
polynomial rates of stress increase much higher than the extrapolation equations above.
Title
-----------
Interpolation is used when results data is available throughout a region of the element, and a data value is
desired within that region. The most common case arises when results data is available at the element nodes,
and an interior element data value is required. Interpolation is based on the element shape functions of
Equation 3.1, where in this case U represents results data available at the element nodes.
A common problem with both extrapolation and interpolation techniques is that they require specifying
locations (where a data value is desired) in terms of the element coordinate system. Unfortunately many
visualization algorithms specify point location in global coordinates. Hence the use of interpolation and
extrapolation techniques frequently requires transforming a global coordinate into an element coordinate. This
process involves identifying the particular element the point is in, as well as solving Equation 3.25 for the
element coordinates ¾. Because the element geometry functions are typically products of polynomials,
closed-form solutions are generally not available. Instead, numerical techniques such as Newton’s method can
be used to solve the systems of equations for the element coordinates [6].
Previous Table of Contents Next
Products | Contact Us | About Us | Privacy | Ad Info | Home
Use of this site is subject to certain Terms & Conditions, Copyright © 1996-2000 EarthWeb Inc. All rights
reserved. Reproduction whole or in part in any form or medium without express written permission of
EarthWeb is prohibited. Read EarthWeb's privacy statement.
Search Tips
Advanced Search
Computer Visualization: Graphics Techniques for Engineering and Scientific Analysis
by Richard S. Gallagher. Solomon Press
CRC Press, CRC Press LLC
ISBN: 0849390508 Pub Date: 12/22/94
Search this book:
Previous Table of Contents Next
3.7.2 Mapping to Visualization Forms
There are two common approaches to mapping engineering analysis data into visualizations. These are 1) data
sampling and 2) conversion of mesh geometry and results data directly into graphical primitives.
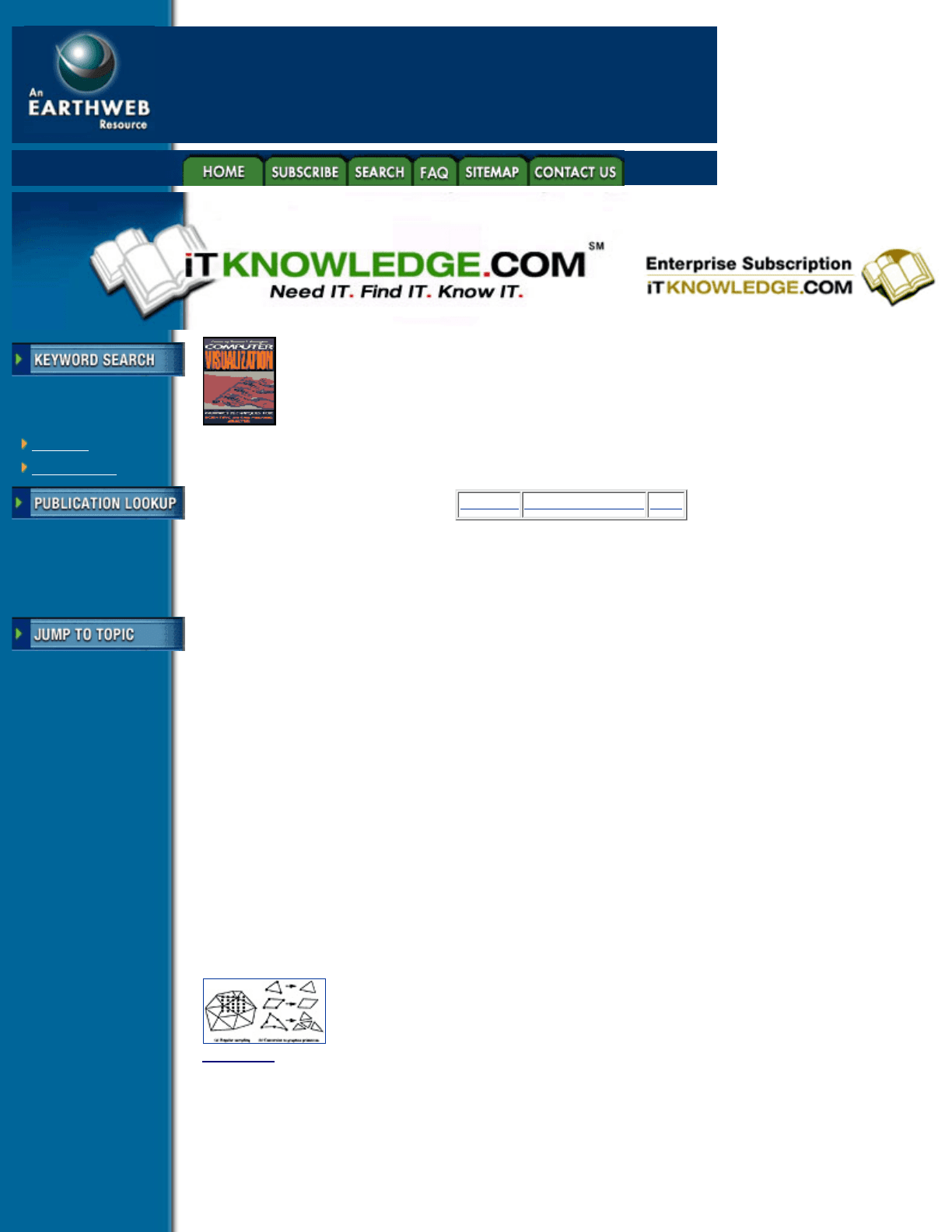
Data sampling is a conceptually simple process (Figure 3.8 (a)). Results data are sampled on a structured
array of points using interpolation and/or extrapolation. The user need only specify the resolution and position
of the sampling array, taking care to sample at a high enough frequency to capture the details of the solution.
Standard volume visualization techniques (Chapter 6) are then used to generate the visual images.
Data sampling is particularly useful for visualizing analysis results based on higher-order shape functions, or
for selected regions within the domain. A significant problem with this method is that the data size of the
sampled data grows with the cube of the sampling density, since current techniques are not adaptive. Hence,
the danger is that limitations on computer resource may result in errors due to undersampling the results data.
Conversion of results data to graphics primitives is another common mapping technique. This process
involves matching element types to available graphics primitives (Figure 3.8(b)). For a small set of linear
element types (i.e., points, lines, triangles, and quadrilaterals) this mapping is direct, as long as results data is
available at the element nodes, otherwise extrapolation needs to be employed. Other linear 3-D elements such
as hexahedra and tetrahedra can be decomposed by mapping the element faces to triangles and quadrilaterals.
Higher order elements are often broken into many primitives depending upon the topology of the elements
and possibly the nature of the solution within the element.
Figure 3.8 Sampling data (a) and primitive conversion (b).
Mapping to graphics primitives is the most common technique today, since it provides information that
graphics hardware can efficiently process. This results in highly interactive visualization systems. The basic
problem with this approach is that decomposing non-linear elements into linear graphics primitives results in
significant loss of accuracy. Decomposition of higher order elements is particulary difficult because of the
complex topology of the element. The decomposition should also be driven by the particulars of the analytical
Title
-----------
solution, which is rarely performed in practice.
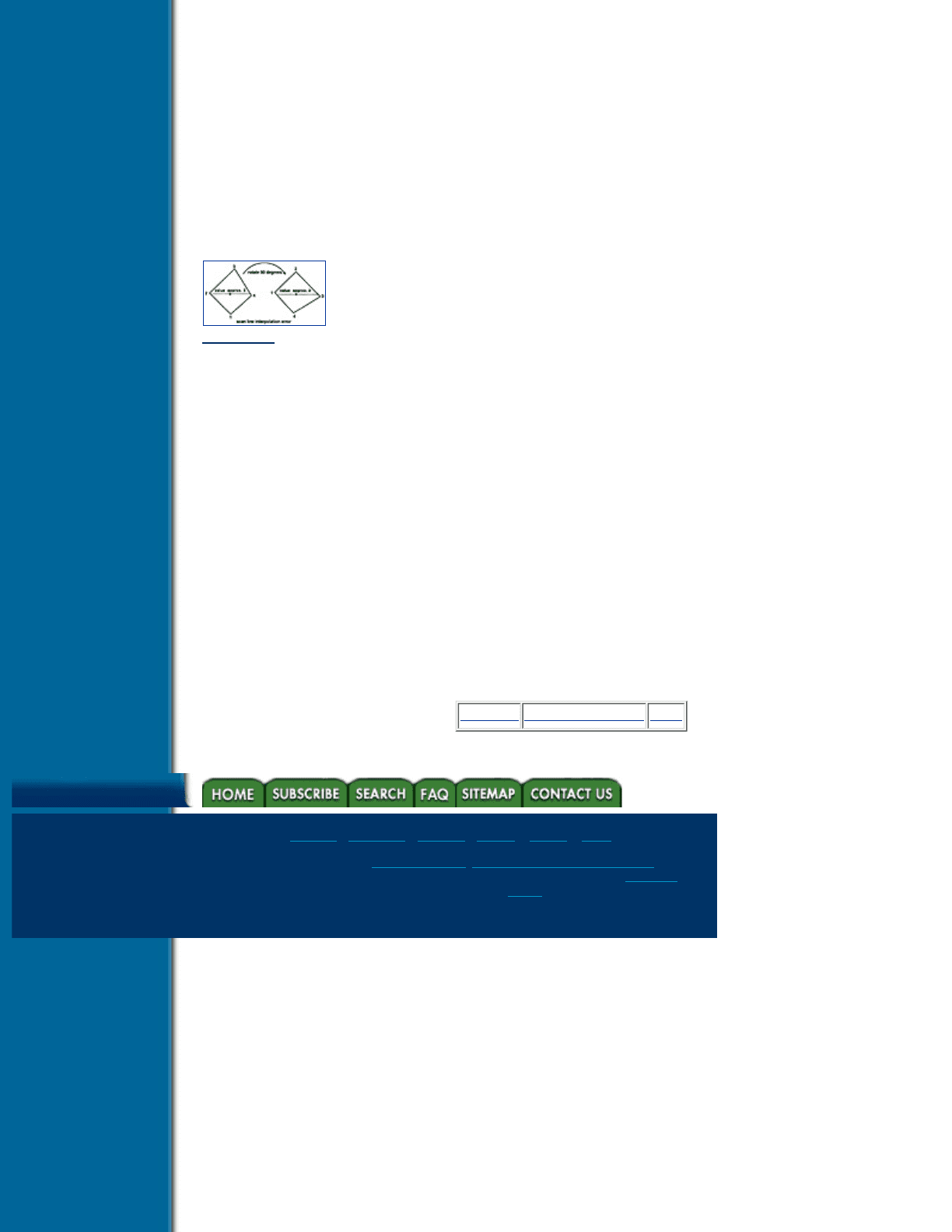
Another important effect during the mapping of results data to visualizations is due to the linear interpolation
schemes employed during the rendering process. This effect is common to both data sampling and primitive
conversion techniques (Figure 3.9). Data sampling techniques depend upon volume rendering to generate the
image. Volume rendering in turn uses nearest neighbor or tri-linear interpolation methods to generate data
values. These methods generate interpolated values different from that obtained by using element shape
functions, especially for higher order elements such as those employed in the adaptive p-refinement finite
element method. The primitive conversion technique suffers a similar problem, since a linear interpolation
scheme is employed during the rendering (i.e., scan conversion) process. Also, because the relative orientation
of the graphics primitives may vary with respect to the direction of the scan conversion, the interpolation
process will generate different visualizations depending upon the orientation of the primitives.
Figure 3.9 The application of basic linear interpolation
3.8 Summary
Typical modern engineering and analysis techniques are based upon discretizing a problem domain into small
pieces, or elements. Over each element an approximation function is used to represent the behavior of the
element in terms of unknown solution variables. These variables are gathered into large systems of equations
and then solved on a computer. The results of this computation can be further processed to yield derivatives
and other related solution variables. The forms of these data are usually scalar, vector, or arbitrary tensor.
Visualization techniques are then used to map the solution information back into the original problem domain.
Visualization is a relatively young field, and significant improvements are needed to better support
engineering analysis. A major problem is that analysis and visualization are often viewed as disconnected
activities. Visualization techniques must be tightly coupled with engineering analysis to accurately convey the
full form and range of results data. Computer graphics vendors also must be encouraged to directly support
advanced visualization functionality such as higher-order graphics primitives and/or programmable
interpolation functions. New visualization techniques must be developed to extend current scalar and vector
techniques, and to provide effective tensor visualization.
Previous Table of Contents Next
Products | Contact Us | About Us | Privacy | Ad Info | Home
Use of this site is subject to certain Terms & Conditions, Copyright © 1996-2000 EarthWeb Inc. All rights
reserved. Reproduction whole or in part in any form or medium without express written permission of
EarthWeb is prohibited. Read EarthWeb's privacy statement.
Search Tips
Advanced Search
Computer Visualization: Graphics Techniques for Engineering and Scientific Analysis
by Richard S. Gallagher. Solomon Press
CRC Press, CRC Press LLC
ISBN: 0849390508 Pub Date: 12/22/94
Search this book:
Previous Table of Contents Next
3.9 Appendix: Construction and Discretization of Weak Form of the
Governing Equations
Weak forms representing the mathematical description of a physical problem can either be directly stated in
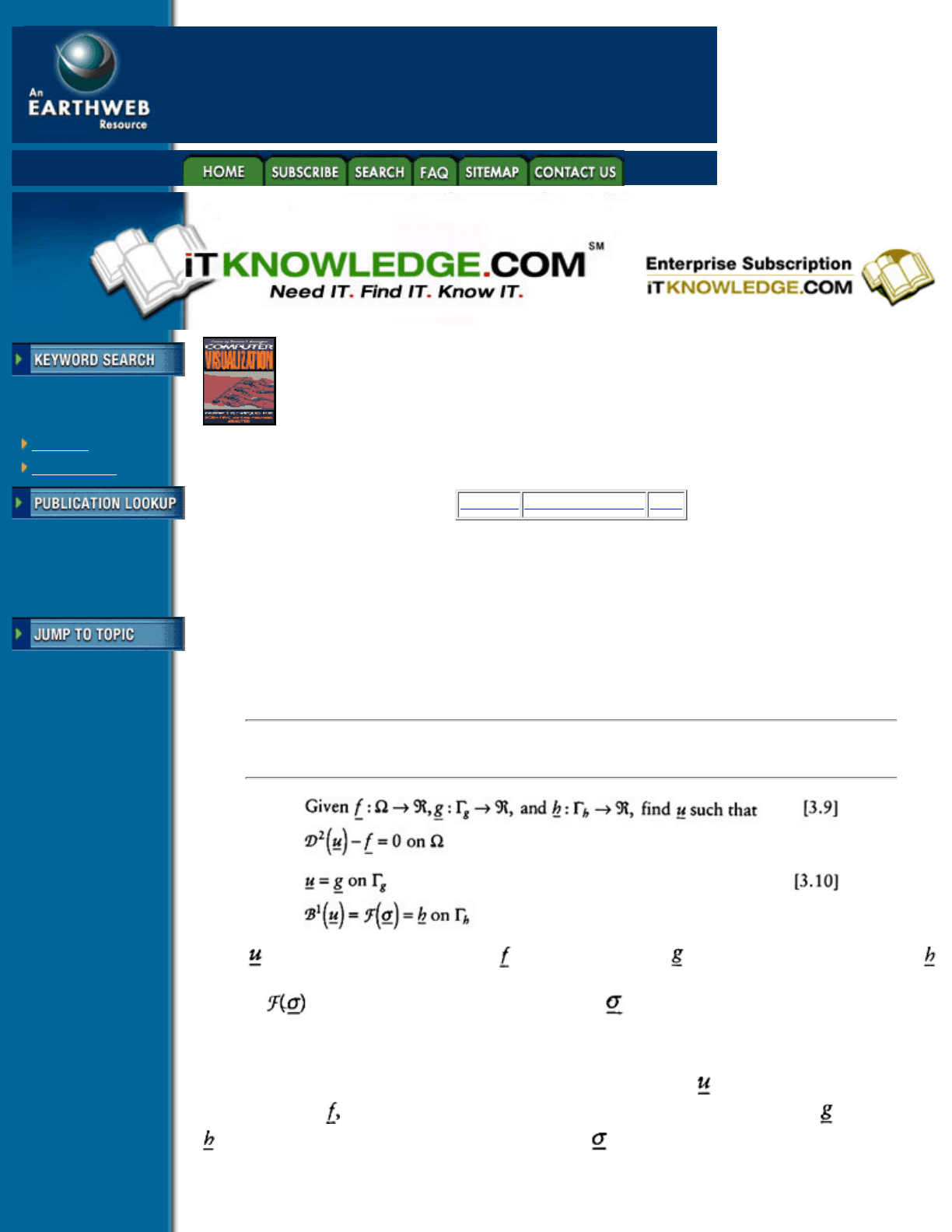
terms of some integral principal, or can be constructed from the governing differential equations. Assume the
mathematical description of a boundary value problem of interest is given as a second order partial differential
equation form as
2
:
2
Consideration of higher order partial differential equations, and initial value problems where time is also an
independent variable, adds to the terms considered here. However, the primary issues discussed are the same.
Specific comments on accounting for time are given in later sections.
where is the primary dependent variable, is the forcing function, are prescribe boundary conditions;
are prescribed flux conditions, D
2
is a second order differential operator, B
1
is a first order differential
operator,
is an algebraic operator acting on the fluxes , © is the domain of the analysis, “
g
is the
portion of the boundary on which the prescribed boundary conditions are prescribed, and “
h
is the portion of
the boundary on which the prescribed flux conditions are prescribed.
Solid mechanics is one such problem area where the dependent variables,
, are the displacements, the
forcing functions,
, are body loads, the prescribed boundary conditions are displacements, , and tractions,
, and the secondary variables of interest are the stresses, . As discussed later, the users of the finite
element analysis procedures are interested in visualization of both the primary and secondary variables of
Title
-----------
interest.
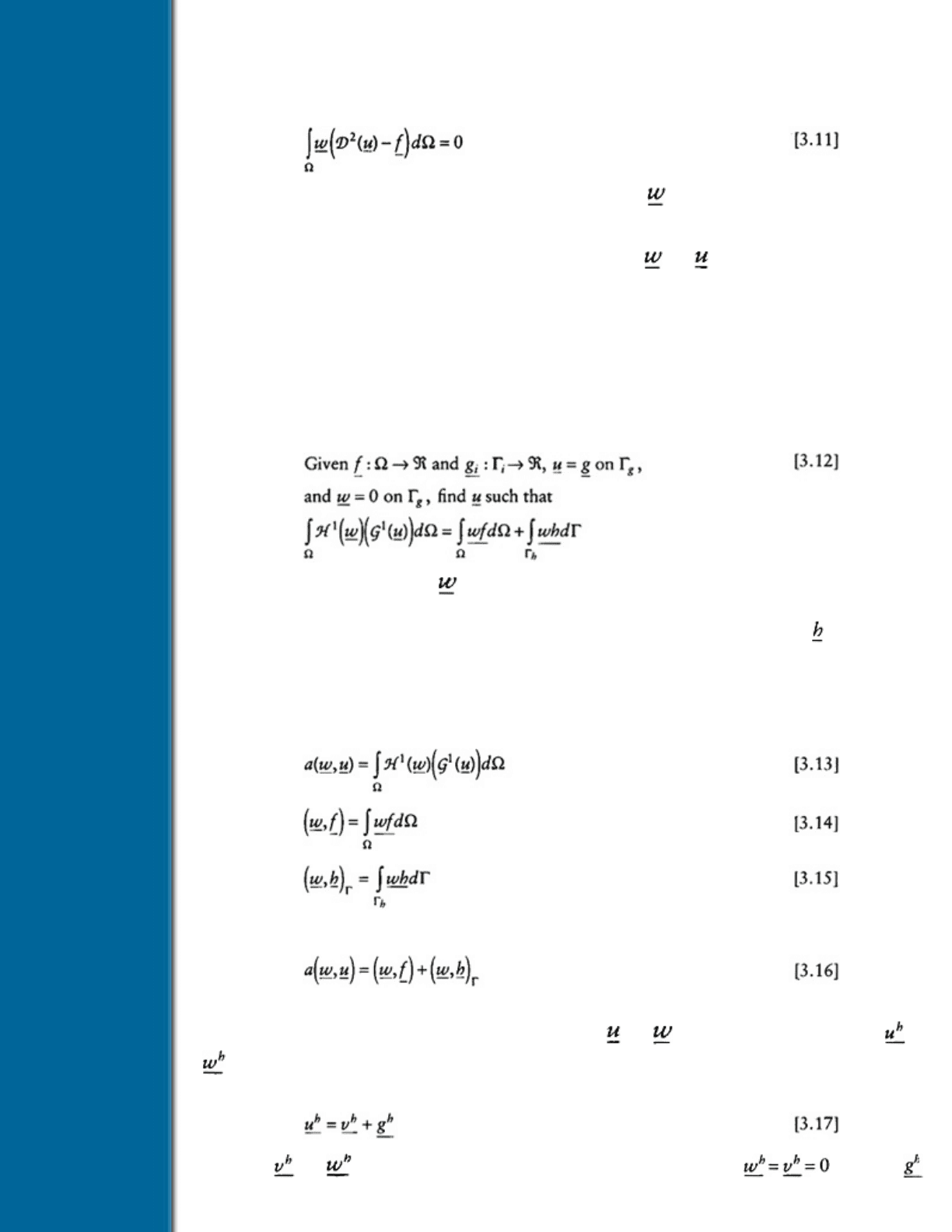
A common method to construct a weak form of the partial differential equations (see Equation 3.9), begins by
multiplying the domain equation by a weighting function, integrating over the domain, and setting that to
zero.
If Equation 3.11 is satisfied for all admissible weighting functions , and the boundary conditions of
Equation 3.10 are satisfied, the exact solution to the problem is obtained. Obtaining this solution is as difficult
as solving the original system Equations 3.9 and 3.10. The advantage of the weak form comes when finite
dimensional spaces are used for the weighting and trial functions,
and , respectively. In this case the
solution to Equation 3.11 provides only a weighted integral solution to Equation 3.9, since Equation 3.11,
which is only an approximate solution, will not in general be satisfied at all points.
Although it is possible to directly construct approximate numerical solutions to the basic weighted integral
form of Equation 3.11, it is not a convenient form for two major reasons. It requires trial and weight functions
that must satisfy all boundary conditions as does Equation 3.10 in their full and homogeneous form,
respectively. Commonly applied weighted residual methods perform mathematical manipulations which yield
more convenient integral forms. For example, by the proper application of integration by parts and the
divergence theorem, Equation 3.11 can be manipulated to produce an equivalent, but more useful, weak form:
for all admissible weight functions , where H
1
and G
1
are first order differential operators which depend on
D
2
and the mathematical manipulations. In Equation 3.12 it was assumed that the mathematical manipulations
were performed such that the last integral did recover the natural boundary condition term,
.
It is convenient at this point to introduce the commonly used abstract operators, with specific properties, for
the individual terms in Equation 3.12. This allows the direct application of the discretization procedure
outlined below to any class of problem which satisfies the operators’ properties [13, 26]. For the current
example define
With this notation Equation 3.12 becomes
Following Reference [13], the discretization of Equation 3.16 to yield the form used by numerical methods
begins by approximating the infinite dimensional spaces for
and with finite dimensional spaces and
. To satisfy non-zero essential boundary conditions while selecting functions from spaces satisfying the
appropriate boundary conditions, it is convenient to write
The terms and must satisfy homogeneous essential boundary conditions, on “
g
, and
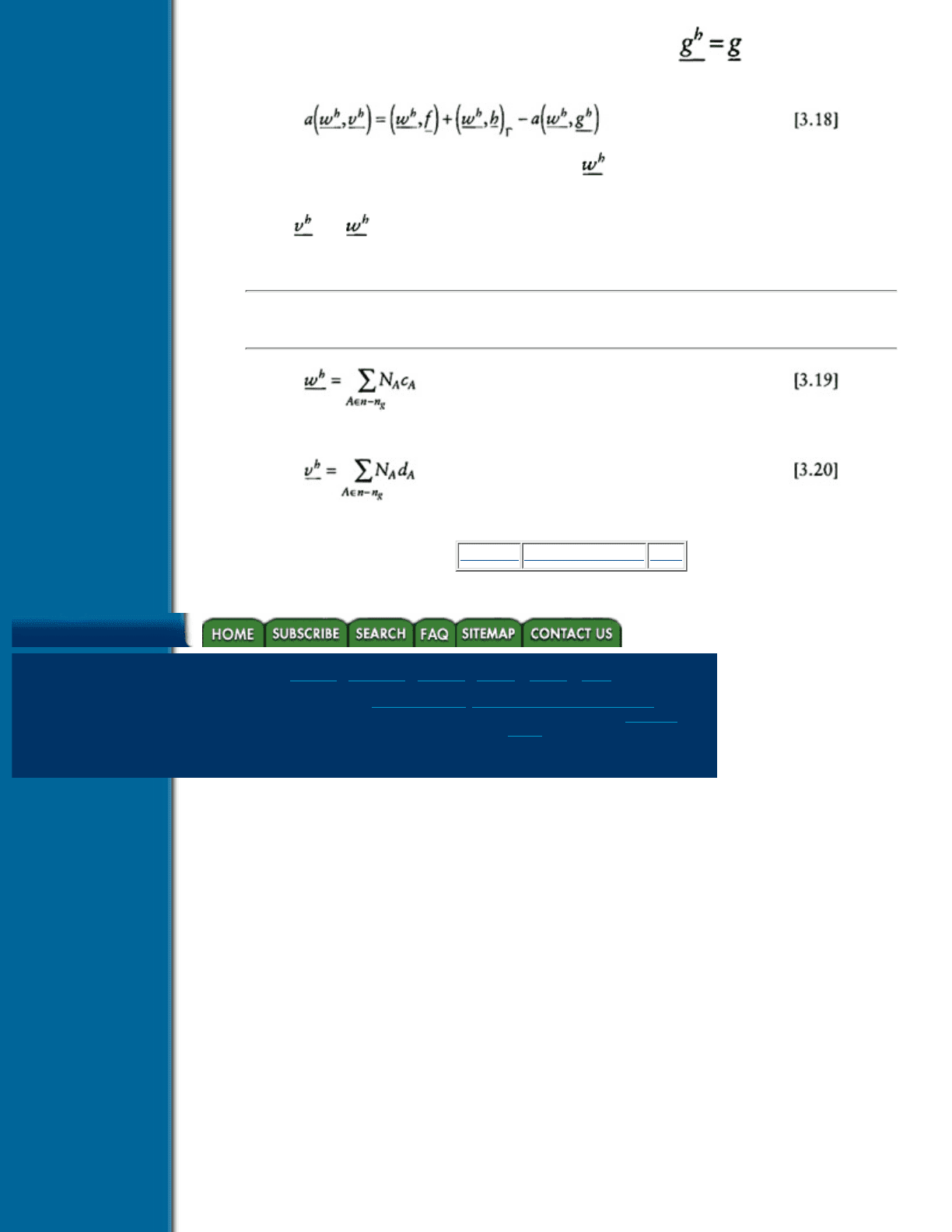
must satisfy, at least approximately, the essential boundary conditions, on “
g
. Substitution of these
functions into Equation 3.16 yields
which must hold for any admissible weighting functions .
In the finite element method the domain being analyzed is discretized into a set of finite elements over which
the functions
and are written in terms of degrees of freedom (dof) times piecewise functions that are
nonzero over only a small subset of the finite elements, typically those that share the dof. In equation form
these functions can be written as
3
3
In the simplified expressions given here the vector expressions are directly expressed in terms of the element
shape functions. In a more detailed explanation of the finite element method it is common to write the expansions
in terms of the individual vector components.
and
Previous Table of Contents Next
Products | Contact Us | About Us | Privacy | Ad Info | Home
Use of this site is subject to certain Terms & Conditions, Copyright © 1996-2000 EarthWeb Inc. All rights
reserved. Reproduction whole or in part in any form or medium without express written permission of
EarthWeb is prohibited. Read EarthWeb's privacy statement.
Search Tips
Advanced Search
Computer Visualization: Graphics Techniques for Engineering and Scientific Analysis
by Richard S. Gallagher. Solomon Press
CRC Press, CRC Press LLC
ISBN: 0849390508 Pub Date: 12/22/94
Search this book:
Previous Table of Contents Next
where N
A
are shape functions, typically piecewise polynomials, c
A
are constants and d
A
are the dof that are to
be determined. The use of capital subscripts indicates a function or multiplier associated with the global
system.
Since
and satisfy only the homogeneous version of the essential boundary conditions, and the trial
functions,
, must satisfy the essential boundary conditions, it is convenient to expand the function as
where N
A
and g
A
are constructed to satisfy the essential boundary exactly, in a pointwise sense, or in an
integrated sense.
Substitution of Equations 3.19, 3.20 and 3.21 into Equation 3.18 yields
Based on the properties of the operators used Equation 3.22 can be rewritten as
Title
-----------
Since the weighting functions are arbitrary, the individual multipliers c
A
in
Equation 3.23 can take on any value. This means the term in the square brackets must be equal to zero for all
values of A. That is:
which represents a set of algebraic equations which can be written in matrix form
where the terms in the vector d are the unknown degrees of freedom, and the terms in the stiffness matrix, K,
and load vector, F, are given by
and
The subscripts P and Q range over the number of dof in the problem and are related to the subscripts A and B
through a mapping process that tracks the fact that some of the possible dof are associated with dof in the
final problem and other potential dof, A, B n - n
g
, are used to account for the essential boundary conditions,
B n
g
.
A key to the effective application of finite element methods is the ability to calculate the terms in the stiffness
matrix of Equation 3.25 with element contributions. To give an indication of the key aspects of that process,
consider the case where the individual dof, d
p
corresponds to the nodal values of the unknown field, the finite
element mesh consists of three-noded triangles, and the global shape function, N
A
is a piecewise linear
function which has a value of one at the node of interest and zero at the edges opposite the vertex (left side of
Figure 3.10). In finite element methods the global shape function is constructed as the appropriate sum of
elemental shape functions, , (right side of Figure 3.10) where the superscript identifies an element and the
lowercase subscript identifies the degrees of freedom on the elemental level.
Figure 3.10 Global shape function and one of its elemental contributions
The integral operators, Equations 3.10-3.15, can be written one element at a time to yield the elemental
stiffness matrix, k
e
and load vector f
e
, where the individual terms are given in terms of the elemental dof as
and
here the integrations are over the domain of the element and its appropriate boundary segments. Since the
local dof have an equivalence to the global dof, and the properties of the integral operators and shape
functions are such that the integral of a sum of element contributions is equal to the sum of the integrals of the
element contributions, the global equations can be constructed by the appropriate summation of element
contributions represented by