Решетов С.А. Электроснабжение воздушных судов Учебник для вузов
Подождите немного. Документ загружается.

Глава
11
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ
АВИАДВИГАТЕЛЕЙ
11.1. СИСТЕМА АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ ТЕМПЕРАТУРЫ
ГАЗОВ ЗА ТУРБИНОЙ
Под режимом работы
АД
подразумевают определенную совокуп-
ность параметров процесса, протекающего
в АД.
Задание режима рабо-
ты,
их
стабилизация
или
программное изменение
в
зависимости
от
внеш-
них воздействий
и
параметров рабочего процесса самого
АД и
состав-
ляет задачу управления режимами работы
АД. К
внешним воздейст-
виям относятся изменение скорости полета, температуры, давления
ат-
мосферного воздуха, углов атаки
ВС и др. В
зависимости
от
значения
тяги обычно выделяют режимы: малого газа, номинальный, максималь-
ный, повышенной тяги, форсированный. Управление
АД
автоматизи-
ровано
и
осуществляется
так,
что
каждому положению
РУД
соответст-
вует определенный режим работы.
Чем
шире диапазон изменения
ре-
жимов
и
выше требование
к
экономичности,
тем
выше требуемый
уровень автоматизации.
В современных
АД
управление режимом осуществляется
с
исполь-
зованием БЦВМ.
В
качестве управляющих воздействий используются:
изменение подачи топлива
в
основную
и
форсажную камеры сгорания,
критического сечения выходного сопла, геометрии проточной части
входного устройства; геометрии компрессора, поворот лопаток
на-
правляющего аппарата компрессора
и т.
д.
Программы управления учи-
тывают особенности конкретного
АД.
Основным регулируемым пара-
метром является угловая скорость ротора
со.
Однако
при
регулирова-
нии только
со
другие параметры
АД
(температура газов
Т,*
перед тур-
биной, степень повышения давления воздуха
в
компрессоре
я
к
,
дав-
ление воздуха
/?к
на
выходе
из
компрессора) могут достичь недопусти-
мых значений. Поэтому необходимо также ограничение ряда других
параметров. Широко используется ограничение температуры газа
за
турбиной
Тт.
Система регулирования реализует программу, определяемую
по-
ложением
РУД
аруд
и
статическим давлением окружающей среды
р
н
.
Ограничение температуры
Т*
г
осуществляется изменением
расхода топлива
при
перемещении перепускной иглы автомата дози-
ровки топлива (АДТ). Регулятор перестраивается
с
задержками
по
времени
для
исключения перерегулирований
в
системе, возможных
вследствие большой постоянной времени датчика температуры.
Бы-
страя перестройка
с
большей температуры
на
меньшую приводит
к
уменьшению тяги,
а с
меньшей
на
большую
— к
перегреву лопаток
турбины. Система имеет высотную коррекцию
—
сигналом
от
датчика
давления изменяется настройка регулятора
Т
т
(при
увеличении
вы-
соты температура ограничения уменьшается).
Так, при
изменении
р
и
198
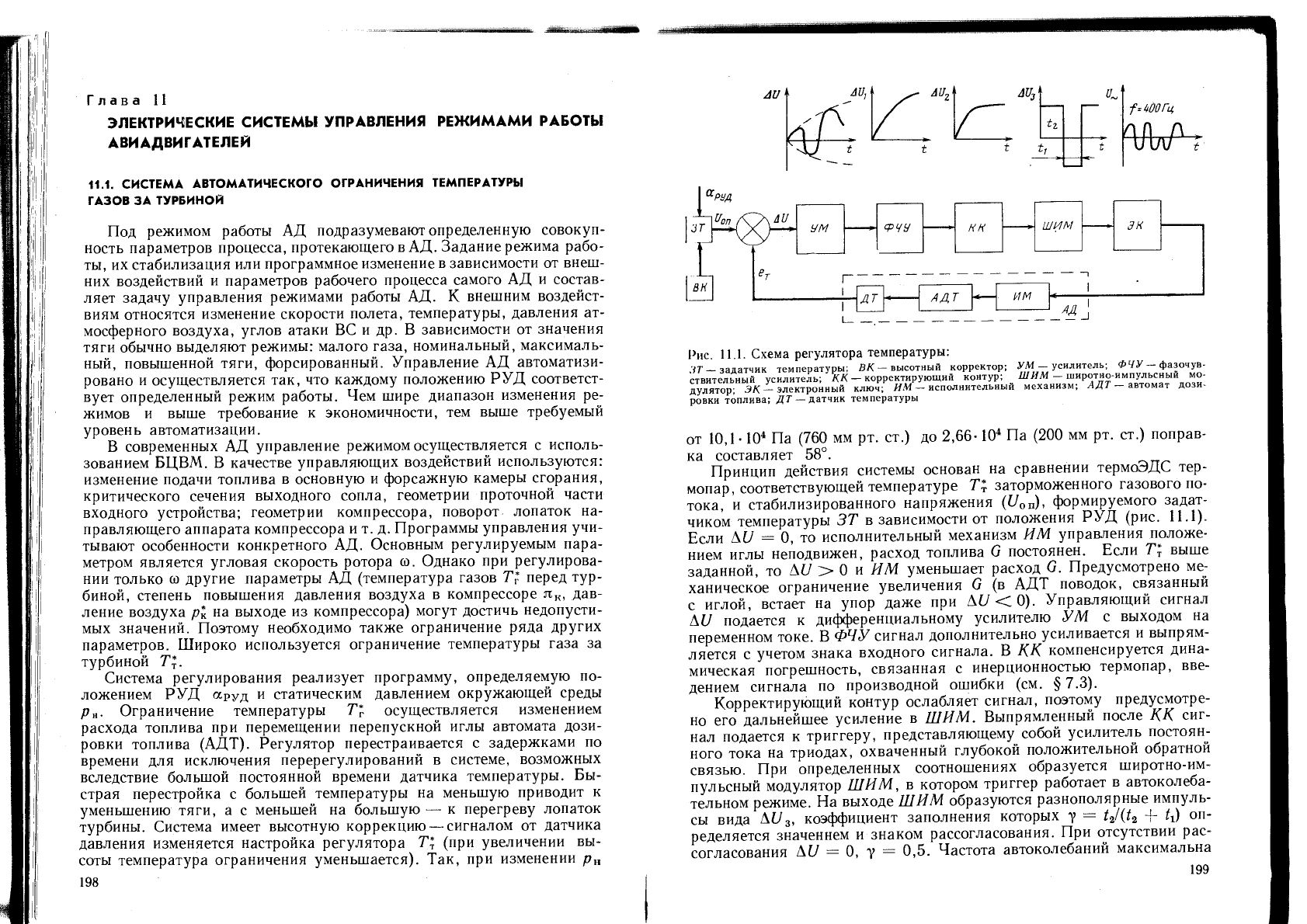
Рис.
11.1. Схема регулятора температуры:
:iT
-
задатчик температуры;
ВК -
высотный корректор;
УМ -
усилитель;
ФЧУ -
фазочув-
ствительный усилитель;
КК -
корректирующий контур;
ШИМ -
широтно-импульсный
мо-
дулятор;
ЭК —
электронный ключ;
ИМ —
исполнительный механизм;
АДТ -
автомат дози-
ровки топлива;
ДТ —
датчик температуры
от
10,1-10*
Па (760 мм рт. ст.) до
2,66-10*
Па (200 мм рт. ст.)
поправ-
ка составляет
58°. ~тт^
Принцип действия системы основан
на
сравнении термоЭДС тер-
мопар, соответствующей температуре
Г;
заторможенного газового
по-
тока,
и
стабилизированного напряжения
(U
on
),
формируемого задат-
чиком температуры
ЗТ в
зависимости
от
положения
РУД
(рис. 11.1).
Если
А(7 = 0, то
исполнительный механизм
ИМ
управления положе-
нием иглы неподвижен, расход топлива
G
постоянен. Если
Т*
т
выше
заданной,
то АН > 0 и ИМ
уменьшает расход
G.
Предусмотрено
ме-
ханическое ограничение увеличения
G (в АДТ
поводок, связанный
с иглой, встает
на
упор даже
при
А(7<0). Управляющий сигнал
AU
подается
к
дифференциальному усилителю
УМ с
выходом
на
переменном токе.
В
ФЧУ
сигнал дополнительно усиливается
и
выпрям-
ляется
с
учетом знака входного сигнала.
В КК
компенсируется дина-
мическая погрешность, связанная
с
инерционностью термопар, вве-
дением сигнала
по
производной ошибки
(см. § 7.3).
Корректирующий контур ослабляет сигнал, поэтому предусмотре-
но
его
дальнейшее усиление
в ШИМ.
Выпрямленный после
КК
сиг-
нал подается
к
триггеру, представляющему собой усилитель постоян-
ного тока
на
триодах, охваченный глубокой положительной обратной
связью.
При
определенных соотношениях образуется широтно-им-
пульсный модулятор
ШИМ, в
котором триггер работает
в
автоколеба-
тельном режиме.
На
выходе
ШИМ
образуются разнополярные импуль-
сы вида
AU
3
,
коэффициент заполнения которых
у =
t
2
/(i
2
+ к) оп-
ределяется значеннем
и
знаком рассогласования.
При
отсутствии рас-
согласования
AU = 0, у = 0,5.
Частота автоколебаний максимальна
199
при
AU- 0 и
уменьшается
при
увеличении
\AU\.
Разнополярные сиг-
налы
ШИМ
используются
для
управления асинхронным двухфазным
двигателем
(АДД) с
помощью электронного ключа
Ж
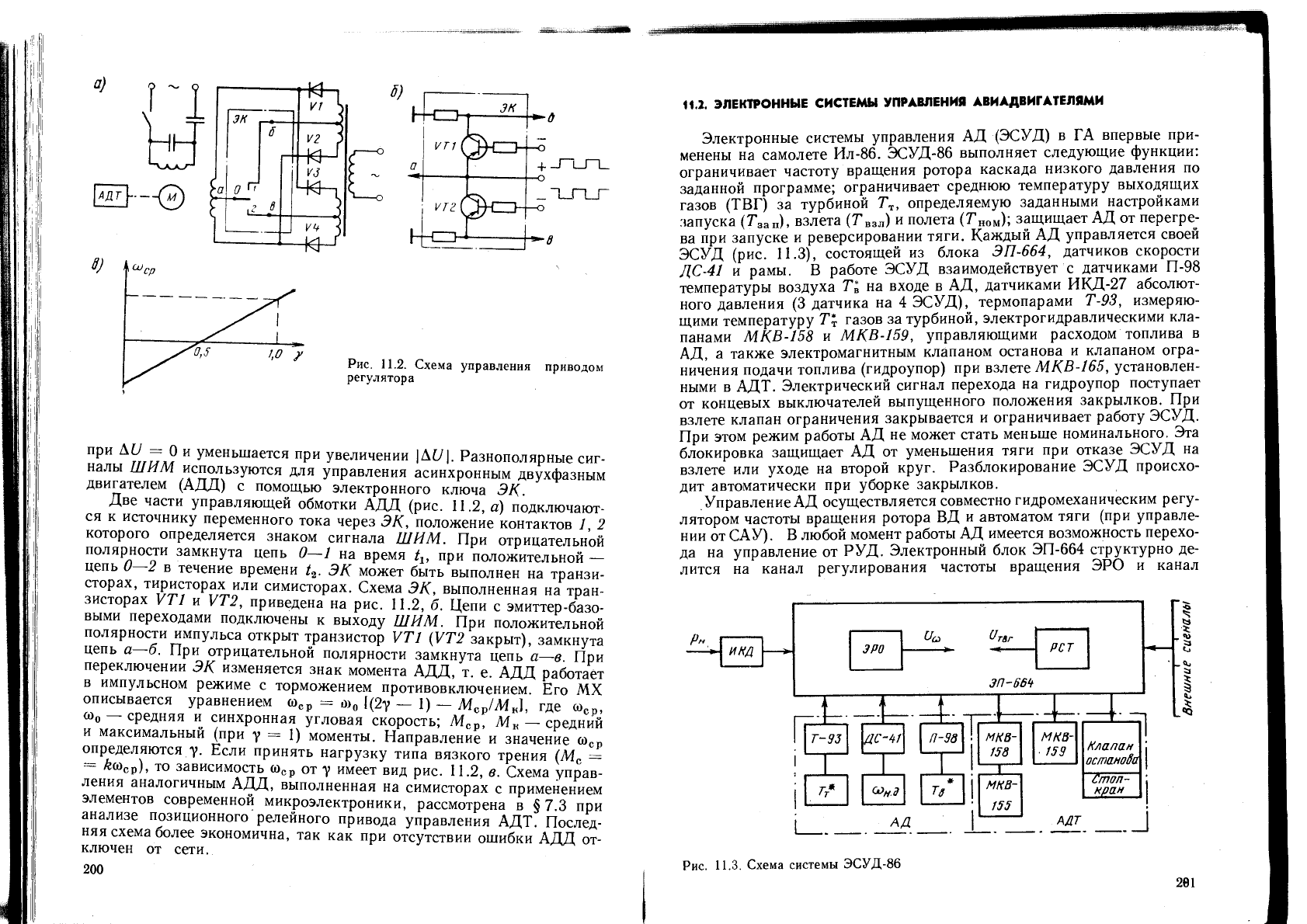
Две части управляющей обмотки
АДД (рис. 11.2, а)
подключают-
ся
к
источнику переменного тока через
ЭК,
положение контактов
/ 2
которого определяется знаком сигнала
ШИМ. При
отрицательной
полярности замкнута цепь
0-1 на
время
t
u
при
положительной
-
цепь
V—2 в
течение времени
t
2
. ЭК
может быть выполнен
на
транзи-
сторах, тиристорах
или
симисторах. Схема
ЭК,
выполненная
на
тран-
зисторах
VT1 и VT2,
приведена
на рис. 11.2, б.
Цепи
с
эмиттер-базо-
выми переходами подключены
к
выходу
ШИМ. При
положительной
полярности импульса открыт транзистор
VT1 (VT2
закрыт), замкнута
цепь
а—б.
При
отрицательной полярности замкнута цепь
а—в При
переключении
ЭК
изменяется знак момента
АДД, т. е. АДД
работает
в импульсном режиме
с
торможением противовключением.
Его MX
описывается уравнением со
ср
= о>
0
[(2у - 1) -
M
C
JM
K
],
где co
CD
,
<о„
—
средняя
и
синхронная угловая скорость;
М
ср
, М
к
—
средний
и максимальный
(при у = 1)
моменты. Направление
и
значение со
с
„
определяются
у.
Если принять нагрузку типа вязкого трения
(М
с
=
- £со
ср
),
то
зависимость со
ср
от у
имеет
вид рис. 11.2, в.
Схема управ-
ления аналогичным
АДД,
выполненная
на
симисторах
с
применением
элементов современной микроэлектроники, рассмотрена
в § 7 3 при
анализе позиционного релейного привода управления
АДТ
Послед-
няя схема более экономична,
так как при
отсутствии ошибки
АДД от-
ключен
от
сети.
200
11.2.
ЭЛЕКТРОННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ АВИАДВИГАТЕЛЯМИ
Электронные системы управления
АД
(ЭСУД)
в ГА
впервые при-
менены
на
самолете Ил-86. ЭСУД-86 выполняет следующие функции:
ограничивает частоту вращения ротора каскада низкого давления
по
заданной программе; ограничивает среднюю температуру выходящих
газов
(ТВГ) за
турбиной
Г
т
,
определяемую заданными настройками
запуска (Г
зап
), взлета (Г
взл
)
и
полета
(Т
ном
);
защищает
АД от
перегре-
ва
при
запуске
и
реверсировании тяги. Каждый
АД
управляется своей
ЭСУД
(рис. 11.3),
состоящей
из
блока ЭП-664, датчиков скорости
ДС-41
и
рамы.
В
работе ЭСУД взаимодействует
с
датчиками
П-98
температуры воздуха
Г* на
входе
в АД,
датчиками ИКД-27 абсолют-
ного давления
(3
датчика
на 4
ЭСУД), термопарами
Т-93,
измеряю-
щими температуру
Т'
т
газов
за
турбиной, электрогидравлическими кла-
панами МКВ-158
и
МКВ-159, управляющими расходом топлива
в
АД,
а
также электромагнитным клапаном останова
и
клапаном огра-
ничения подачи топлива (гидроупор)
при
взлете МКВ-165, установлен-
ными
в АДТ.
Электрический сигнал перехода
на
гидроупор поступает
от концевых выключателей выпущенного положения закрылков.
При
взлете клапан ограничения закрывается
и
ограничивает работу ЭСУД.
При этом режим работы
АД не
может стать меньше номинального.
Эта
блокировка защищает
АД от
уменьшения тяги
при
отказе ЭСУД
на
взлете
или
уходе
на
второй круг. Разблокирование ЭСУД происхо-
дит автоматически
при
уборке закрылков.
Управление
АД
осуществляется совместно гидромеханическим регу-
лятором частоты вращения ротора
ВД и
автоматом тяги
(при
управле-
нии
от
САУ).
В
любой момент работы
АД
имеется возможность перехо-
да
на
управление
от РУД.
Электронный блок ЭП-664 структурно
де-
лится
на
канал регулирования частоты вращения
ЭРО и
канал
икд
93
ЭРО
ДС-41
Л-98
Ь>н.З
и,
таг
РСТ
ЭП-ВВ^
МКВ-
158
МКВ-
159
Те
АД
мкв-
155
3
Клапан
ошано8а
Стоп-
кран
АДТ
1
4
Рис.
11.3.
Схема системы ЭСУД-86
261
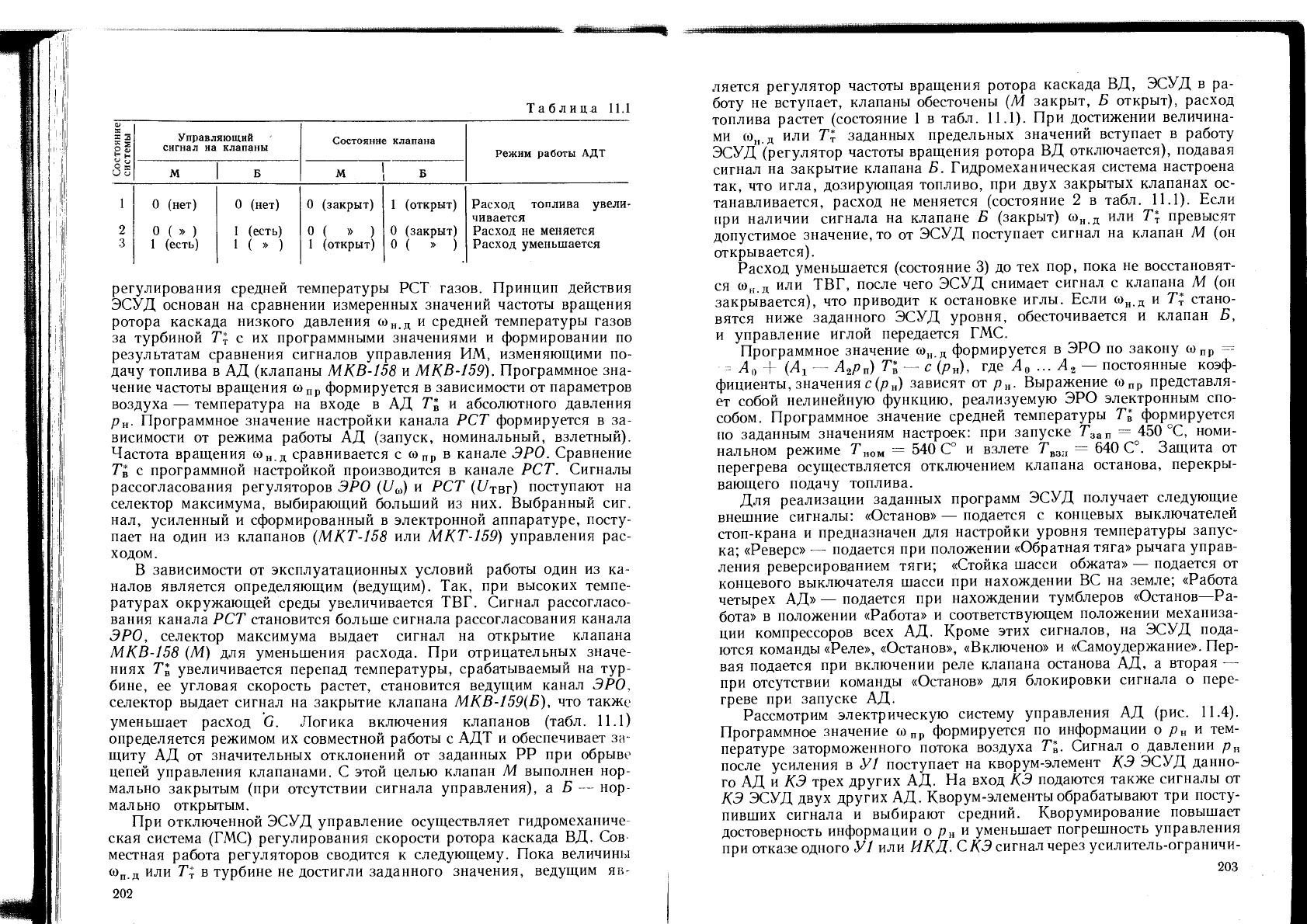
Таблица 11.1
0>
ж
Я
3
Управляющий
Состояние клапана
о g
сигнал иа клапаны
Режим работы АДТ
63
М
Б М
1
0 (нет)
0 (нет) 0 (закрыт)
1 (открыт)
Расход топлива увели-
чивается
2
0 ( » )
I
(есть)
0 ( » )
0 (закрыт) Расход не меняется
3
1 (есть) 1 ( » ) 1 (открыт)
0 ( » )
Расход уменьшается
регулирования средней температуры РСТ газов. Принцип действия
ЭСУД основан на сравнении измеренных значений частоты вращения
ротора каскада низкого давления со
н
.д и средней температуры газов
за турбиной Т*
т
с их программными значениями и формировании по
результатам сравнения сигналов управления ИМ, изменяющими по-
дачу топлива в АД (клапаны МКВ-158 и МКВ-159). Программное зна-
чение частоты вращения <в
П
р формируется в зависимости от параметров
воздуха — температура на входе в АД Т
в
и абсолютного давления
/?„.
Программное значение настройки канала РСТ формируется в за-
висимости от режима работы АД (запуск, номинальный, взлетный).
Частота вращения со
н д
сравнивается с со
пр
в канале ЭРО. Сравнение
Т
в
с программной настройкой производится в канале РСТ. Сигналы
рассогласования регуляторов ЭРО ((У
м
) и РСТ ((7твг) поступают на
селектор максимума, выбирающий больший из них. Выбранный сиг.
нал, усиленный и сформированный в электронной аппаратуре, посту-
пает на один из клапанов (МКТ-158 или МКТ-159) управления рас-
ходом.
В зависимости от эксплуатационных условий работы один из ка-
налов является определяющим (ведущим). Так, при высоких темпе-
ратурах окружающей среды увеличивается ТВГ. Сигнал рассогласо-
вания канала РСТ становится больше сигнала рассогласования канала
ЭРО, селектор максимума выдает сигнал на открытие клапана
МКВ-158 (М) для уменьшения расхода. При отрицательных значе-
ниях Т1 увеличивается перепад температуры, срабатываемый на тур-
бине, ее угловая скорость растет, становится ведущим канал ЭРО,
селектор выдает сигнал на закрытие клапана МКВ-159(Б), что также
уменьшает расход G. Логика включения клапанов (табл. 11.1)
определяется режимом их совместной работы с АДТ и обеспечивает за-
щиту АД от значительных отклонений от заданных РР при обрыве
цепей управления клапанами. С этой целью клапан М выполнен нор-
мально закрытым (при отсутствии сигнала управления), а Б -- нор-
мально открытым.
При отключенной ЭСУД управление осуществляет гидромеханиче-
ская система (ГМС) регулирования скорости ротора каскада ВД. Сов
местная работа регуляторов сводится к следующему. Пока величины
со
п
.д или Г; в турбине не достигли заданного значения, ведущим яв-
202
МП
1
ПИШИ
ляется регулятор частоты вращения ротора каскада ВД, ЭСУД в ра-
боту не вступает, клапаны обесточены (М закрыт, Б открыт), расход
топлива растет (состояние 1 в табл.
11.1).
При достижении величина-
ми (о
н
.д или Г; заданных предельных значений вступает в работу
ЭСУД (регулятор частоты вращения ротора ВД отключается), подавая
сигнал на закрытие клапана Б. Гидромеханическая система настроена
так, что игла, дозирующая топливо, при двух закрытых клапанах ос-
танавливается, расход не меняется (состояние 2 в табл.
11.1).
Если
при наличии сигнала на клапане Б (закрыт) со
н Д
или Т% превысят
допустимое значение, то от ЭСУД поступает сигнал на клапан М (он
открывается).
Расход уменьшается (состояние 3) до тех пор, пока не восстановят-
ся со„.д или ТВГ, после чего ЭСУД снимает сигнал с клапана М (он
закрывается), что приводит к остановке иглы. Если со
н Д
и Т$ стано-
вятся ниже заданного ЭСУД уровня, обесточивается и клапан Б,
и управление иглой передается ГМС.
Программное значение со
н
.
д
формируется в ЭРО по закону со
пр
=
=
А
0
+ (А, — А
2
рп) Т1 — с (/?„), где А
0
... А
2
— постоянные коэф-
фициенты, значения с (р
н
) зависят от р
н
. Выражение ю
пр
представля-
ет собой нелинейную функцию, реализуемую ЭРО электронным спо-
собом. Программное значение средней температуры 7^ формируется
по заданным значениям настроек: при запуске
Т
зап
= 450 С. номи-
нальном режиме Т
иом
= 540 С° и взлете Г
вз
„ = 640 С
0
. Защита от
перегрева осуществляется отключением клапана останова, перекры-
вающего подачу топлива.
Для реализации заданных программ ЭСУД получает следующие
внешние сигналы: «Останов» — подается с концевых выключателей
стоп-крана и предназначен для настройки уровня температуры запус-
ка; «Реверс» — подается при положении «Обратная тяга» рычага управ-
ления реверсированием тяги; «Стойка шасси обжата» — подается от
концевого выключателя шасси при нахождении ВС на земле; «Работа
четырех АД» — подается при нахождении тумблеров «Останов—Ра-
бота» в положении «Работа» и соответствующем положении механиза-
ции компрессоров всех АД. Кроме этих сигналов, на ЭСУД пода-
ются команды «Реле», «Останов», «Включено» и «Самоудержание». Пер-
вая подается при включении реле клапана останова АД, а вторая —
при отсутствии команды «Останов» для блокировки сигнала о пере-
греве при запуске АД.
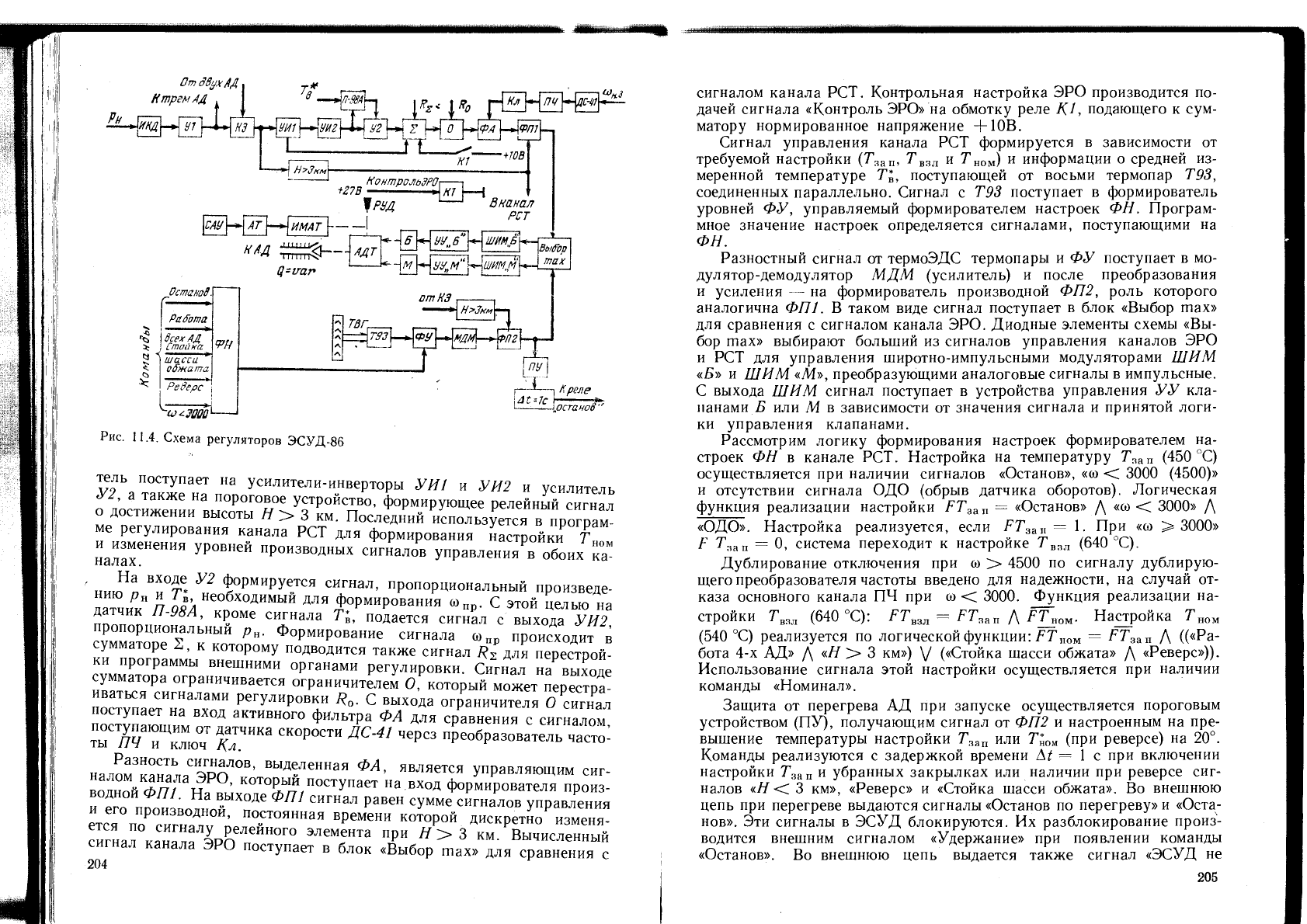
Рассмотрим электрическую систему управления АД (рис.
11.4).
Программное значение ш
пр
формируется по информации о/)
Е
и тем-
пературе заторможенного потока воздуха Т*
я
. Сигнал о давлении р
я
после усиления в У1 поступает на кворум-элемент КЭ ЭСУД данно-
го АД и КЭ трех других АД. На вход КЭ подаются также сигналы от
КЭ ЭСУД двух других АД. Кворум-элементы обрабатывают три посту-
пивших сигнала и выбирают средний. Кворумирование повышает
достоверность информации о р
н
и уменьшает погрешность управления
при отказе одного У1 или ИКД. С КЭ сигнал через усилитель-ограничи-
203
От двух АД.
К трем
/1Д
. I
Нл
—
ПЧ
САУ АТ
ИМАТ
Вканал
РСТ
НАД
Q=var
АДТ
Выо~ор
max
Останов.
^и^ЗООО
Рис.
11.4.
Схема регуляторов ЭСУД-86
тель поступает
на
усилители-инверторы
УИ1 и УИ2 и
усилитель
а также
на
пороговое устройство, формирующее релейный сигнал
о достижении высоты
Я > 3
км.
Последний используется
в
програм
ме регулирования канала
РСТ для
формирования настройки
Г
и изменения уровней производных сигналов управления
в
обоих
ка"
' нию
Н
^ Тт
6
*
У2
$°Р
ми
РУ
е
„
тся
CH
™,
пропорциональный произведе-
на™
П
98 А
Не
°
бх
°
ДИМЫИ
для
Формирования со
пр
.
С
этой целью
на
датчик
П-98А,
кроме сигнала
Т'
в
,
подается сигнал
с
выхода
УИ2
пропорциональный
р
н
.
Формирование сигнала со
пр
происходит
в
сумматоре
2, к
которому подводится также сигнал ^%лГперестрой
ки программы внешними органами регулировки. Сигнал
на
выводе
сумматора ограничивается ограничителем
О,
который может перестра-
иваться сигналами регулировки
R
0
. С
выхода ограничителя
О
сигнал
пост
Т
^аюдц
Н
им
В
от
ОД аК
™
ВН
°
Г
°
ФА ДЛЯ
С
Р
авНения
с
ты ПЧикГюч Тл
ЧЧШ СКОРОС
™
Д
ЧеРСЗ п
Р
еоб
Р
азоват
ель частой
налом
3
кГя
Ь
и
Я
С
ЧРО
0В>
выделенная
ФА
'
«веется управляющим
сиг-
S
i н '
который поступает
на
вход формирователя произ-
водной
ФП1. На
выходе ФП1 сигнал равен сумме сигналов управления
ется п?ГгГ"
0И
'
ПО
Р
оянная
в
Р™ени которой дискретно
Р
измен я
сигнал кя^я я^^у релейного элемента
при Я > 3 км.
Вычисленный
сигнал канала
ЭРО
поступает
в
блок «Выбор тах»
для
сравнения
с
204
сигналом канала
РСТ.
Контрольная настройка
ЭРО
производится
по-
дачей сигнала «Контроль ЭРО»
на
обмотку реле
К1,
подающего
к
сум-
матору нормированное напряжение
+10В.
Сигнал управления канала
РСТ
формируется
в
зависимости
от
требуемой настройки (Т
зап
, Т
взл
и
Т
ном
)
и
информации
о
средней
из-
меренной температуре
Т
в
,
поступающей
от
восьми термопар
Т93,
соединенных параллельно. Сигнал
с Т93
поступает
в
формирователь
уровней
ФУ,
управляемый формирователем настроек
ФН.
Програм-
мное значение настроек определяется сигналами, поступающими
на
ФН.
Разностный сигнал
от
термоЭДС термопары
и
ФУ
поступает
в
мо-
дулятор-демодулятор
МДМ
(усилитель)
и
после преобразования
и усиления
— на
формирователь производной
ФП2,
роль которого
аналогична
ФП1.
В
таком виде сигнал поступает
в
блок «Выбор тах»
для сравнения
с
сигналом канала ЭРО. Диодные элементы схемы «Вы-
бор тах» выбирают больший
из
сигналов управления каналов
ЭРО
и
РСТ для
управления широтно-импульсными модуляторами
ШИМ
«5»
и
ШИМ
«М», преобразующими аналоговые сигналы
в
импульсные.
С выхода
ШИМ
сигнал поступает
в
устройства управления
УУ
кла-
панами
Б
или
М в
зависимости
от
значения сигнала
и
принятой логи-
ки управления клапанами.
Рассмотрим логику формирования настроек формирователем
на-
строек
ФН в
канале
РСТ.
Настройка
на
температуру Т
зап
(450 °С)
осуществляется
при
наличии сигналов «Останов», «со
<
3000
(4500)»
и отсутствии сигнала
ОДО
(обрыв датчика оборотов). Логическая
функция реализации настройки
FT
3an
=
«Останов»
Д
«со
<
3000»
Д
«ОДО». Настройка реализуется, если
FT
3an
= 1.
При «со
>
3000»
/
:
Т
зяп
= 0,
система переходит
к
настройке Т
взл
(640 С).
Дублирование отключения
при
со >• 4500
по
сигналу дублирую-
щего преобразователя частоты введено
для
надежности,
на
случай
от-
каза основного канала
ПЧ при
со
<
3000.
Функция реализации
на-
стройки
Т
взл
(640
°С):
FT
B3J1
=
/Т
зап
Д
FT\
0M
.
Настройка Т
ном
(540
°С)
реализуется
по
логической функции:
FT
noM
=
FT
3aT1
Д
((«Ра-
бота
4-х АД»
Д
«Я
> 3
км»)
V
(«Стойка шасси обжата»
Д
«Реверс»)).
Использование сигнала этой настройки осуществляется
при
наличии
команды «Номинал».
Защита
от
перегрева
АД
при
запуске осуществляется пороговым
устройством (ПУ), получающим сигнал
от ФП2
и
настроенным
на
пре-
вышение температуры настройки
Т
ЗЯп
или
Г
ном
(при
реверсе)
на
20°.
Команды реализуются
с
задержкой времени
At = 1 с
при
включении
настройки Гдап
и
убранных закрылках
или
наличии
при
реверсе сиг-
налов
«Я
<С
3
км»,
«Реверс»
и
«Стойка шасси обжата».
Во
внешнюю
цепь
при
перегреве выдаются сигналы «Останов
по
перегреву»
и
«Оста-
нов».
Эти
сигналы
в
ЭСУД блокируются.
Их
разблокирование произ-
водится внешним сигналом «Удержание»
при
появлении команды
«Останов».
Во
внешнюю цепь выдается также сигнал «ЭСУД
не
205
работает» при неисправности датчика ДС-41 (формируется по сигнал}
ОДО),
при со <
4500
и наличии сигнала на уменьшение расхода топ
лива, неисправности канала РСТ и отключении питания ЭСУД.
Принятие экипажем управления АД на себя осуществляется от-
ключением питания ЭСУД. При этом появляется сигнал «ЭСУД не
работает». Экипаж управляет АД с помощью РУД через АДТ. При
перемещении РУД происходит перестройка регулятора угловой ско-
рости ротора каскада ВД, вследствие чего изменяется расход топлива,
поступающего к АД. В установившемся полете РУД фиксируется
рычагом стопорения. Для выдерживания заданной скорости в ре-
жиме автоматического управления полетом предусмотрено использова-
ние автомата тяги (АТ) с исполнительным механизмом автомата тяги,
управляемым по сигналам вычислителя САУ. В случае включения АТ
застопоренных РУД на приборной доске полетов появляется сигнал
«Расстоп. РУД».
Предполетная проверка работоспособности ЭСУД-86, целостно
сти цепей взаимодействующих изделий осуществляется по внешним
сигналам «Min» и «Мах» при неработающих АД и наличии внешнего
сигнала «Стойка шасси обжата». При сигнале «Min» проверяются ис-
правность датчиков ИКД-27, П-98А я
ДС-41,
функционирование кана-
ла ЭРО подачей сигнала +10 В через контакты реле К1, отсутствие
сигнала «ЭСУД не работает». При сигнале «Мах» проверяются целост-
ность цепей термопар Т-93 и реле «Останов», функционирование кана-
ла РСТ и защиты от перегрева при реверсе. Информация об исправно-
сти выдается на сигнальную лампу «ЭСУД исправна» или «Отказ
ЭСУД» в случае отказа при каждом цикле проверок при наличии сиг-
налов «Min» или «Мах» (в течение 5 с). На аппаратуру регистрации
ЭСУД-86 выдает сигналы: «ЭСУД не работает» при отказе ЭСУД-86
или при отсутствии питания; «Останов по перегреву» при срабатывании
защиты от перегрева; «Номинал» о реализации в ЭСУД-86 номиналь-
ной настройки Гном-
11.3. БОРТОВЫЕ ЦВМ В КОНТУРЕ УПРАВЛЕНИЯ АВИАДВИГАТЕЛЕМ
Электронная система управления АД (ЭСУД) по существу являет-
ся ограничителем, вступающим в работу при выходе параметров АД
за программируемые пределы. Основные задачи управления выпол-
няются ГМС. Дальнейшим развитием автоматизации управления АД
явилось использование в контуре управления АД БЦВМ и создание
электронно-гидромеханических систем управления (ЭГМУ), выпол-
няющих функции управления АД в полном объеме, включая все виды
запуска.
ЭГМУ состоит из электронных регуляторов (РЭД), блоков комму-
тации (БК), систем измерения параметров АД, исполнительных меха-
низмов, электромагнитных клапанов и автономного источника питания
(электрогенератора). При отказе электронной части ЭГМУ системой
206
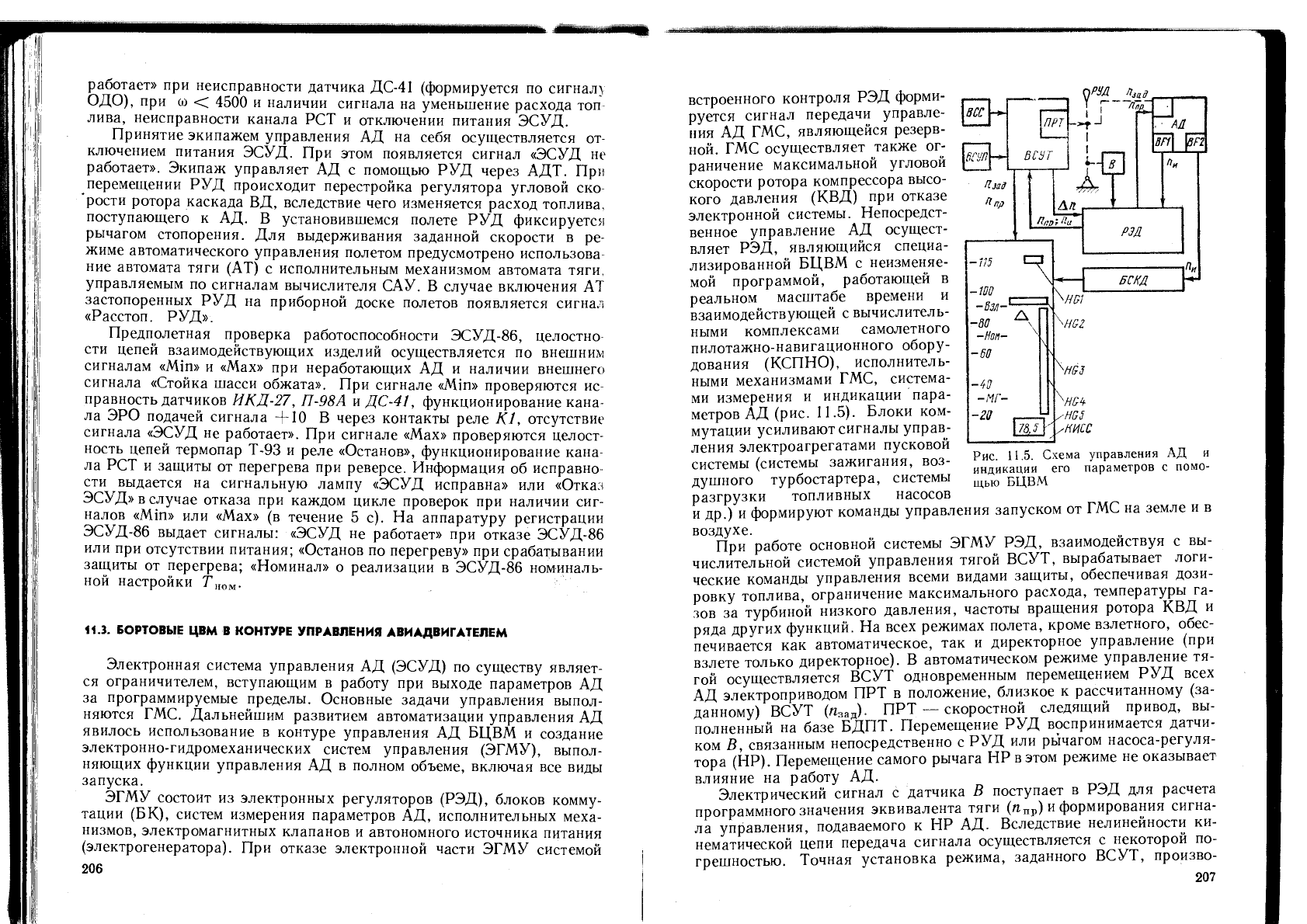
встроенного контроля РЭД форми-
руется сигнал передачи управле-
ния АД ГМС, являющейся резерв-
ной. ГМС осуществляет также ог-
раничение максимальной угловой
скорости ротора компрессора высо-
кого давления (КВД) при отказе
электронной системы. Непосредст-
венное управление АД осущест-
вляет РЭД, являющийся специа-
лизированной БЦВМ с неизменяе-
мой программой, работающей в
реальном масштабе времени и
взаимодействующей с вычислитель-
ными комплексами самолетного
пилотажно-навигационного обору-
дования (КСПНО). исполнитель-
ными механизмами ГМС, система-
ми измерения и индикации пара-
метров АД (рис.
1 1
.5). Блоки ком-
мутации усиливают сигналы управ-
ления электроагрегатами пусковой
системы (системы зажигания, воз-
душного турбостартера, системы
разгрузки топливных насосов
и др.) и формируют команды управления запуском от ГМС на земле и в
воздухе.
При работе основной системы ЭГМУ РЭД, взаимодействуя с вы-
числительной системой управления тягой ВСУТ, вырабатывает логи-
ческие команды управления всеми видами защиты, обеспечивая дози-
ровку топлива, ограничение максимального расхода, температуры га-
зов за турбиной низкого давления, частоты вращения ротора КВД и
ряда других функций. На всех режимах полета, кроме взлетного, обес-
печивается как автоматическое, так и директорное управление (при
взлете только директорное). В автоматическом режиме управление тя-
гой осуществляется ВСУТ одновременным перемещением РУД всех
АД электроприводом ПРТ в положение, близкое к рассчитанному (за-
данному) ВСУТ
(я
зад
).
ПРТ — скоростной следящий привод, вы-
полненный на базе БДПТ. Перемещение РУД воспринимается датчи-
ком В, связанным непосредственно с РУД или рычагом насоса-регуля-
тора (HP). Перемещение самого рычага HP в этом режиме не оказывает
влияние на работу АД.
Электрический сигнал с датчика В поступает в РЭД для расчета
программного значения эквивалента тяги (п
пр
) и формирования сигна-
ла управления, подаваемого к HP АД. Вследствие нелинейности ки-
нематической цепи передача сигнала осуществляется с некоторой по-
грешностью. Точная установка режима, заданного ВСУТ, произво-
вес
——-•
вес
ПРТ ПРТ
ВСУП
ВСУТ
РУЛ ъ„г
-115
-т
-Взл-
-80
-Иап-
А
\
\
-60
\
-40
-НГ-
-20
W
V/C7
\НС2
/HG5
/НИСС
Рис.
11.5. Схема управления АД и
индикации его параметров с помо-
щью БЦВМ
207
дится сигналом An, формируемым в пределах (0,03 ... 0,05) п
зад
во
ВСУТ по разности л
зад
— п
пр
и подаваемым в цифровом коде непо-
средственно из ВСУТ в РЭД каждого АД. При этом РУД всех АД
неподвижны и находятся в положениях, установленных ПРТ. В ре-
зультате РЭД каждого АД формирует программное значение п
пр
=
=
/
(«РУД,
Ларуд, Tl, pi, С
отб
), где
а
РУД
— сигнал с датчика
В;
Аа
Р
уд — корректирующий сигнал; Т
в
и р
в
— температура и
давление воздуха; С
отб
— масса отбираемого от АД воздуха. Заметим,
что точность передачи сигнала от РУД к HP может быть повышена
заменой механической тяги следящим приводом.
Для реализации автоматического управления формирования сиг-
налов п
зад
и An из РЭД во ВСУТ подаются сигналы л
пр
(обратная
связь) и текущее значение я
и
, измеренное датчиком угловой скорости
BF1
(для контроля). В автоматическом режиме формирование
я
зад
во ВСУТ осуществляется по сигналам вычислительной системы само-
летовождения ВСС. В директорном режиме экипаж управляет АД вруч-
ную с помощью РУД, устанавливая
я
зад
в соответствии с сигналом,
выдаваемым из ВСУТ на индикатор КИСС. Режим формируется ВСУТ
совместно с вычислительной системой управления полетом ВСУП,
выдающей требуемые параметры полета на различных этапах.
Для контроля экипажем правильности установки режима работы
АД на комплексную информационную систему сигнализации КПСС
подаются сигналы: из РЭД п
пр
(поступает через ВСУТ), из ВСУТ за-
данное /г
зад
и предельное «
пред
значения эквивалента тяги по этапам
полета, из БСКД (бортовой системы контроля двигателя) текущее зна-
чение п
н
, измеренное датчиком BF2. В КПСС уровень регистрируе-
мых параметров отображается в виде световых графических сигналов
HG1
... HG5. При нормальном режиме работы положения указате-
лей
«да
д.
п
н
и п
пр должны быть согласованы. Расчет заданного (требуе-
мого) режима при взлете осуществляется автоматически в КСНПО
после введения со специального пульта данных о загрузке самолета,
состоянии аэродрома, температуре наружного воздуха и других дан-
ных или экипажем вручную с последующим вводом результатов расче-
та во ВСУТ с пульта управления тягой.
Глава 12
СИСТЕМЫ ФЛЮГИРОВАНИЯ ВОЗДУШНЫХ винтов
12.1. ОБЩИЕ СВЕДЕНИЯ
Системы флюгирования воздушных винтов (ВВ), как правило, —
часть общей системы изменения их шага в полете. Воздушный винт
создает тягу, равную силе реакции отброшенной им струи воздуха.
Основными характеристиками ВВ являются: его диаметр D, число
лопастей п
л
, их профиль, ширина лопасти Ь, ее толщина с, форма в пла-
208
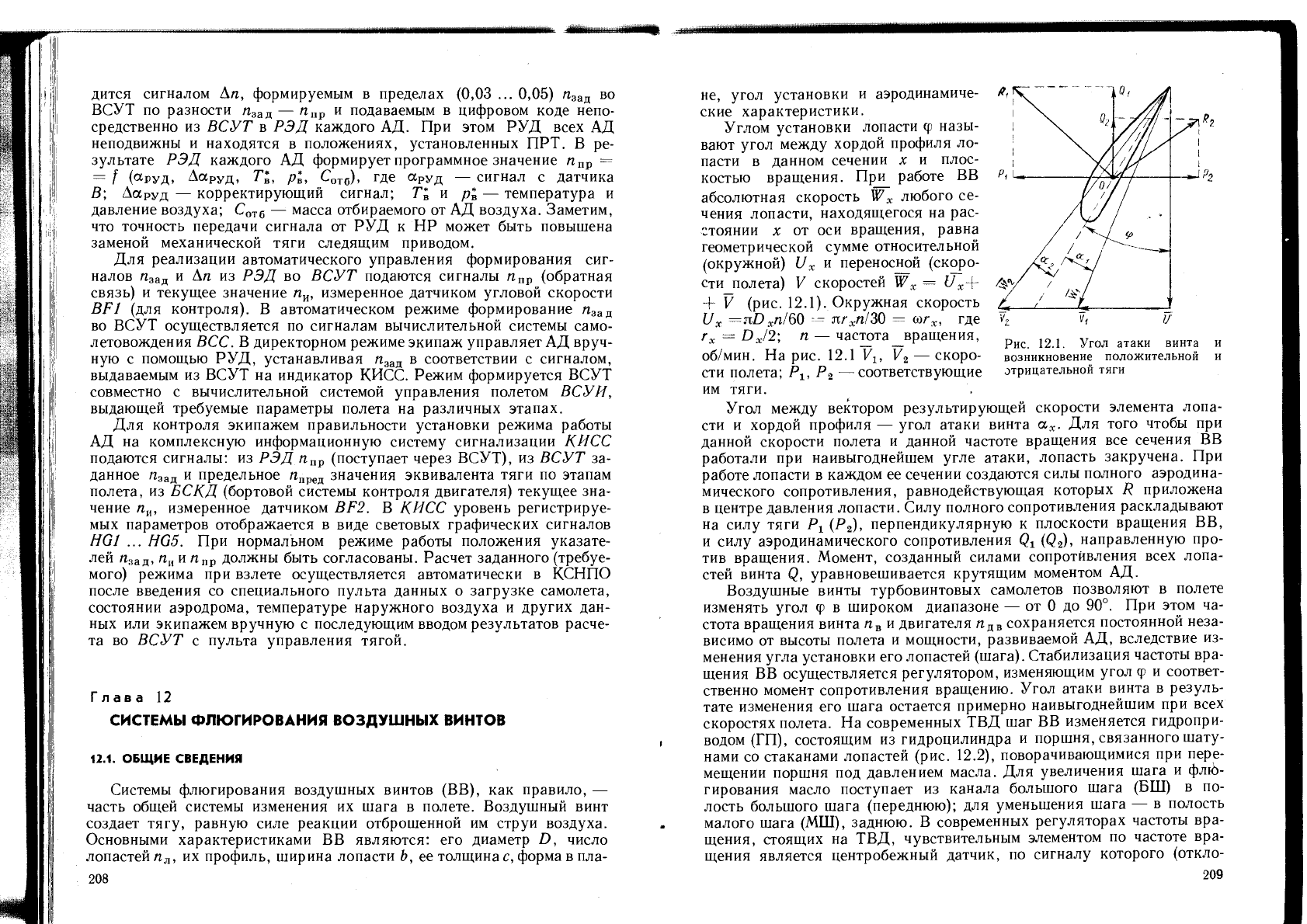
Рис.
12.1. Угол атаки винта и
возникновение
положительной и
отрицательной
тяги
не,
угол установки и аэродинамиче-
ские характеристики.
Углом установки лопасти ср назы-
вают угол между хордой профиля ло-
пасти в данном сечении х и плос-
костью вращения. При работе ВВ
абсолютная скорость W
x
любого се-
чения лопасти, находящегося на рас-
стоянии х от оси вращения, равна
геометрической сумме относительной
(окружной) U
х
и переносной (скоро-
сти полета) V скоростей W
х
= сУ
х
+
+
V (рис.
12.1).
Окружная скорость
U
x
=nD
x
n/60
— яг
ж
я/30 = ш
х
, где
r
x
=
D
X
I2;
п — частота вращения,
об/мин. На рис. 12.1 V
lt
V
2
— скоро-
сти полета; Р
1у
Р
2
—соответствующие
им тяги.
Угол между вектором результирующей скорости элемента лопа-
сти и хордой профиля — угол атаки винта а
х
. Для того чтобы при
данной скорости полета и данной частоте вращения все сечения ВВ
работали при наивыгоднейшем угле атаки, лопасть закручена. При
работе лопасти в каждом ее сечении создаются силы полного аэродина-
мического сопротивления, равнодействующая которых R приложена
в центре давления лопасти. Силу полного сопротивления раскладывают
на силу тяги Р
х
(Р
2
), перпендикулярную к плоскости вращения ВВ,
и силу аэродинамического сопротивления Q
1
(Q
2
), направленную про-
тив вращения. Момент, созданный силами сопротивления всех лопа-
стей винта Q, уравновешивается крутящим моментом АД.
Воздушные винты турбовинтовых самолетов позволяют в полете
изменять угол ср в широком диапазоне — от 0 до 90°. При этом ча-
стота вращения винта п
в
и двигателя л
дв
сохраняется постоянной неза-
висимо от высоты полета и мощности, развиваемой АД, вследствие из-
менения угла установки его лопастей (шага). Стабилизация частоты вра-
щения ВВ осуществляется регулятором, изменяющим угол
ср
и соответ-
ственно момент сопротивления вращению. Угол атаки винта в резуль-
тате изменения его шага остается примерно наивыгоднейшим при всех
скоростях полета. На современных ТВД шаг ВВ изменяется гидропри-
водом (ГП), состоящим из гидроцилиндра и поршня, связанного шату-
нами со стаканами лопастей (рис.
12.2),
поворачивающимися при пере-
мещении поршня под давлением масла. Для увеличения шага и флю-
гирования масло поступает из канала большого шага (БШ) в по-
лость большого шага (переднюю); для уменьшения шага — в полость
малого шага (МШ), заднюю. В современных регуляторах частоты вра-
щения, стоящих на ТВД, чувствительным элементом по частоте вра-
щения является центробежный датчик, по сигналу которого (откло-
209
нению) подается масло
для
увеличения
или
уменьшения угла
ср.
При нормальной работе системы «АД—ВВ» соотношение скорости
полета
V,
окружной скорости винта
U и
угла установки лопастей
ср
таково,
что
угол между вектором результирующей скорости любого
се-
чения винта
W = V + U и
хордой профиля винта
(а > 0)
близок
к
оптимальному
и
обеспечивает создание положительной тяги, направ-
ленной
по
полету.
При
отказах
АД и
неправильном пилотировании
мо-
жет возникнуть режим работы,
при
котором тяга направлена против
полета
(см. рис.
12.1).
При
отказах
АД
лопасти
ВВ
ставят
во
флюгер-
ное положение,
при
котором
их
хорды совпадают
с
осью втулки
ВВ,
а
АД
выключают. Аэродинамическое сопротивление винта
Р во
флю-
герном положении минимально.
Для постановки (поворота) лопастей винта
во
флюгерное положе-
ние применяется система флюгирования, позволяющая производить
операции флюгирования автоматически
или
принудительно. Системы
автоматического
и
принудительного флюгирования электрогидравличе-
ские,
состоящие
из
силового
ГП
(гидроцилиндр
с
поршнем
и
каналами
распределения масла
в
регуляторе частоты вращения)
и
управляющей
электрической схемы. Имеется также аварийная система флюгирова-
ния,
в
которой
для
включения
ГП
используется инертный
газ под
дав-
лением
3-Ю
3
... 7-10
3
кПа.
Гидропривод, перемещающий лопасти
ВВ
во флюгерное положение, развивает моохность, равную произведению
момента флюгирования
на
угловую скорость лопастей
при
переклад-
ке.
Эта
мощность является
ис-
ходной
для
выбора
ЭП
флюгер-
ного насоса.
При вращении
ВВ
центро-
бежные силы
F
n6
всех
его
эле-
ментарных масс,
не
лежащих
на
продольной
оси
лопастей,
на-
правлены
по
прямым, соединяю-
щим
их
центры
с
центром вра-
щения
(рис.
12.3),
и
расклады-
ваются
на
продольные
F
u6o
и
поперечные
F
n6
.
n
составляющие.
Результирующий момент
от по-
перечных составляющих цент-
робежных
сил
стремится умень-
шить угол
ср. По
техническим
данным современных
ВВ
этот
момент составляет
80 ... 85 %
общего момента, потребного
для уменьшения угла
ср, и
лишь
20 ... 15 %
потребного момента
создается
ГП для
преодоления
сил трения
в
заделке лопастей
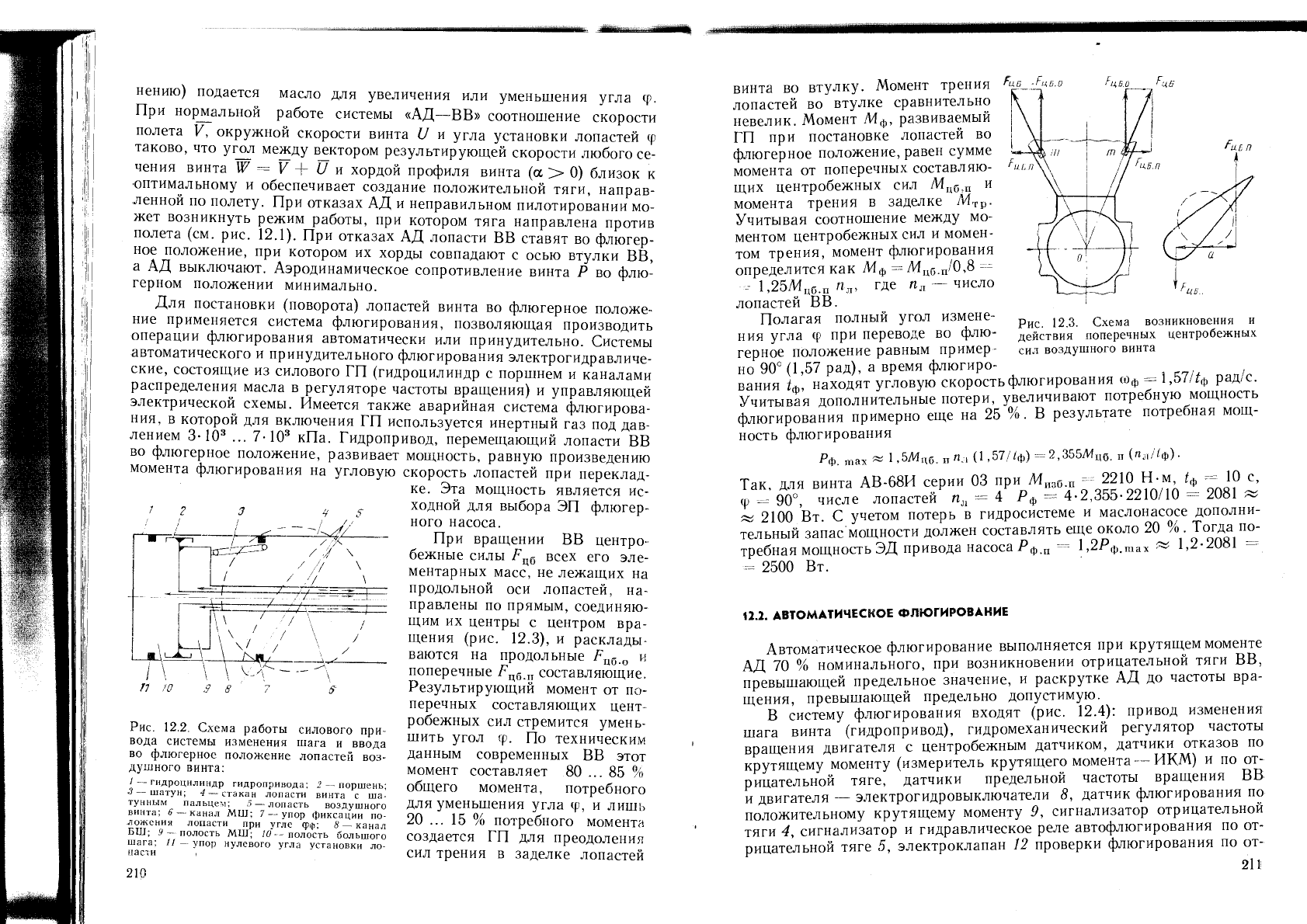
Рис.
12.2.
Схема работы силового при-
вода
системы изменения шага
и
ввода
во
флюгерное положение лопастей
воз-
душного
винта:
/
—
гидроцилиндр гидропривода:
2
-поршень;
3
шатун;
4 —
стакан лопасти винта
с ша-
тунным
пальцем;
,5 —
лопасть воздушного
винта;
«--канал
МШ; 7 —
упор фиксации
по-
ложения
лопасти
при
угле
фф; 8 —
канал
ЬШ;
9 -.
полость
МШ; 10 —
полость большого
шага;
// —
упор нулевого угла установки
ло-
пасти
,
210
винта
во
втулку. Момент трения
лопастей
во
втулке сравнительно
невелик. Момент
М
ф
,
развиваемый
ГП
при
постановке лопастей
во
флюгерное положение, равен сумме
момента
от
поперечных составляю-
щих центробежных
сил
М
цб
,
п
и
момента трения
в
заделке УМ
тр
.
Учитывая соотношение между
мо-
ментом центробежных
сил
и
момен
-
том трения, момент флюгирования
определится
как М
ф
=
М
цб
.
п
/0,8
••
1,25М
цб.п
где
п
}
число
Рис.
12.3.
Схема возникновения
и
действия
поперечных центробежных
сил
воздушного винта
лопастей
ВВ.
Полагая полный угол измене-
ния угла
ср при
переводе
во
флю-
герное положение равным пример
но
90° (1,57
рад),
а
время флюгиро
вания
4,
находят угловую скорость флюгирования
со
ф
=
1,о/7г
ф
рад/с.
Учитывая дополнительные потери, увеличивают потребную мощность
флюгирования примерно
еще на 25 %. В
результате потребная мощ-
ность флюгирования
Рф.
max «
1,5М
цб
.
„ n,
(1,57//ф)
=
2,355Л*
Ц0
.
„
(п„/1ф).
Так,
для
винта АВ-68И серии
03 при
М
иаб
.
п
=-"•
2210 Н-м, /
ф
==10 с,
(|
90 ,
числе лопастей
п
л
= 4 Р
ф
= 4.2,355-2210/10 = 2081 «
да 2100 Вт. С
учетом потерь
в
гидросистеме
и
маслонасосе дополни-
тельный запас мощности должен составлять
еще
около
20
%
.
Тогда
по-
требная мощность
ЭД
привода насоса
Р
ф
.
п
=
1,2Р
ф
.
гаа
х
~ 1,2-2081 -=
=
2500 Вт.
12.2.
АВТОМАТИЧЕСКОЕ ФЛЮГИРОВАНИЕ
Автоматическое флюгирование выполняется
при
крутящем моменте
АД
70 %
номинального,
при
возникновении отрицательной тяги
ВВ,
превышающей предельное значение,
и
раскрутке
АД до
частоты вра-
щения, превышающей предельно допустимую.
В систему флюгирования входят
(рис.
12.4):
привод изменения
шага винта (гидропривод), гидромеханический регулятор частоты
вращения двигателя
с
центробежным датчиком, датчики отказов
по
крутящему моменту (измеритель крутящего момента
—
ИКМ)
и по от-
рицательной тяге, датчики предельной частоты вращения
ВВ
и двигателя
—
электрогидровыключатели
8,
датчик флюгирования
по
положительному крутящему моменту
9,
сигнализатор отрицательной
тяги
4
У
сигнализатор
и
гидравлическое реле автофлюгирования
по от-
рицательной тяге
5,
электроклапан
12
проверки флюгирования
по от-
211;
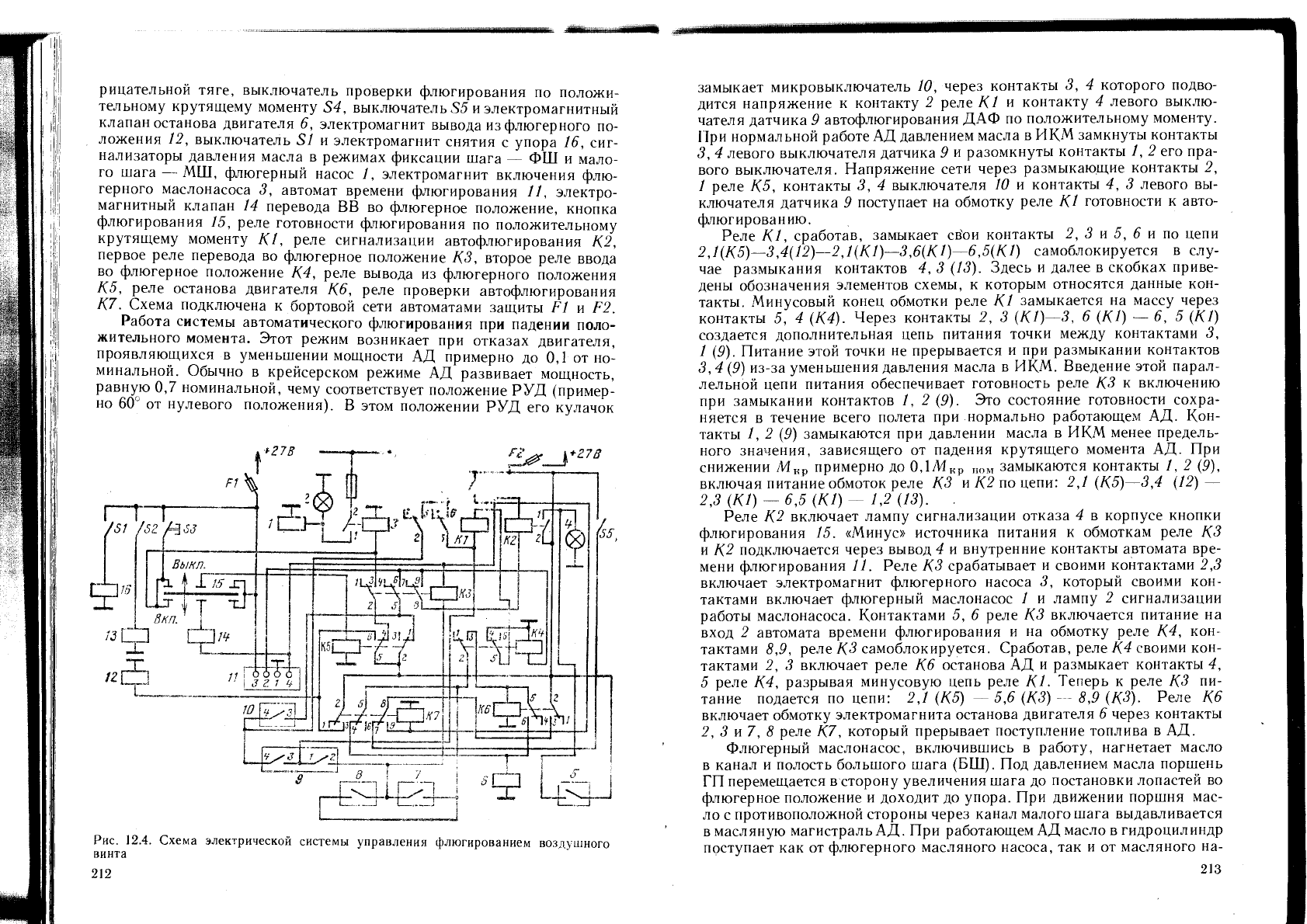
рицательной тяге, выключатель проверки флюгирования по положи-
тельному крутящему моменту S4, выключатель 55 и электромагнитный
клапан останова двигателя 6, электромагнит вывода из флюгерного по-
ложения 12, выключатель S1 и электромагнит снятия с упора 16, сиг-
нализаторы давления масла в режимах фиксации шага — ФШ и мало-
го шага — МШ, флюгерный насос /, электромагнит включения флю-
герного маслонасоса 3, автомат времени флюгирования //, электро-
магнитный клапан 14 перевода ВВ во флюгерное положение, кнопка
флюгирования 15, реле готовности флюгирования по положительному
крутящему моменту Л7, реле сигнализации автофлюгирования К2,
первое реле перевода во флюгерное положение КЗ, второе реле ввода
во флюгерное положение К4, реле вывода из флюгерного положения
К5,
реле останова двигателя Кб, реле проверки автофлюгирования
К7. Схема подключена к бортовой сети автоматами защиты F1 и F2.
Работа системы автоматического флюгирования при падении поло-
жительного момента. Этот режим возникает при отказах двигателя,
проявляющихся в уменьшении мощности АД примерно до 0,1 от но-
минальной. Обычно в крейсерском режиме АД развивает мощность,
равную 0,7 номинальной, чему соответствует положение РУД (пример-
но 60° от нулевого положения). В этом положении РУД его кулачок
Рис.
12.4. Схема электрической системы управления флюгированием воздушного
винта
212
замыкает микровыключатель 10, через контакты 3, 4 которого подво-
дится напряжение к контакту 2 реле К1 и контакту 4 левого выклю-
чателя датчика 9 автофлюгирования ДАФ по положительному моменту.
При нормальной работе АД давлением масла в ИКМ замкнуты контакты
3, 4 левого выключателя датчика 9 и разомкнуты контакты /, 2 его пра-
вого выключателя. Напряжение сети через размыкающие контакты 2,
1 реле К5, контакты 3, 4 выключателя 10 и контакты 4, 3 левого вы-
ключателя датчика 9 поступает на обмотку реле К1 готовности к авто-
флюгированию.
Реле К1, сработав, замыкает св
ч
ои контакты 2, 3 и 5, 6 и по цепи
2,ЦК5)—3,4(12)—2,1(К1)—3,6(К1)—6,5(К1) самоблокируется в слу-
чае размыкания контактов
4,3(13).
Здесь и далее в скобках приве-
дены обозначения элементов схемы, к которым относятся данные кон-
такты. Минусовый конец обмотки реле К1 замыкается на массу через
контакты 5, 4 (К4). Через контакты 2, 3 (К1)—3, 6 (К1) — 6, 5 (К1)
создается дополнительная цепь питания точки между контактами 3,
1 (9). Питание этой точки не прерывается и при размыкании контактов
3,4 (9) из-за уменьшения давления масла в ИКМ. Введение этой парал-
лельной цепи питания обеспечивает готовность реле КЗ к включению
при замыкании контактов 1, 2 (9). Это состояние готовности сохра-
няется в течение всего полета при нормально работающем АД. Кон-
такты 1, 2 (9) замыкаются при давлении масла в ИКМ менее предель-
ного значения, зависящего от падения крутящего момента АД. При
снижении М
кр
примерно до 0,Ш
кр
,
юм
замыкаются контакты /, 2 (9),
включая питание обмоток реле КЗ и К2 по цепи: 2,1 (К5)—3,4 (12) —
2,3 (К1) — 6,5 (К1) — 1,2 (13). .
Реле К2 включает лампу сигнализации отказа 4 в корпусе кнопки
флюгирования 15. «Минус» источника питания к обмоткам реле КЗ
и К2 подключается через вывод 4 и внутренние контакты автомата вре-
мени флюгирования 11. Реле КЗ срабатывает и своими контактами 2,3
включает электромагнит флюгерного насоса 3, который своими кон-
тактами включает флюгерный маслонасос / и лампу 2 сигнализации
работы маслонасоса. Контактами 5, 6 реле КЗ включается питание на
вход 2 автомата времени флюгирования и на обмотку реле К4, кон-
тактами 8,9, реле КЗ самоблокируется. Сработав, реле К4 своими кон-
тактами 2, 3 включает реле Кб останова АД и размыкает контакты 4,
5 реле К4, разрывая минусовую цепь реле К1
•
Теперь к реле КЗ пи-
тание подается по цепи: 2,1 (К5) — 5,6 (КЗ) — 8,9 (КЗ). Реле Кб
включает обмотку электромагнита останова двигателя 6 через контакты
2, 3 и 7, 8 реле К7, который прерывает поступление топлива в АД.
Флюгерный маслонасос, включившись в работу, нагнетает масло
в канал и полость большого шага (БШ). Под давлением масла поршень
ГП перемещается в сторону увеличения шага до постановки лопастей во
флюгерное положение и доходит до упора. При движении поршня мас-
ло с противоположной стороны через канал малого шага выдавливается
в масляную магистраль АД. При работающем АД масло в гидроцилиндр
поступает как от флюгерного масляного насоса, так и от масляного на-
213
coca
регулятора частоты вращения. После постановки
на
флюгерный
упор масло
из
канала большого шага стравливается через редукцион-
ный клапан
на
вход масляного насоса регулятора.
По окончании времени флюгирования автомат времени
//
примерно
через
10 ... 20 с
разрывает минусовую цепь реле
КЗ и К2.
Реле
КЗ
размыкает свои контакты
3, 2 и 5, 6,
отключая
от
сети электромагнит
флюгерного насоса
3,
обмотку реле
К4 и
разрывает цепь самоблоки-
рования реле
КЗ
через контакты
8, 9.
Реле
К2
выключает лампу
4
сигнализации отказа
АД.
Реле
Кб
остается включенным, кран остано-
ва тоже включен. Обмотка реле Л'6' питается
от
сети через размыкающие
контакты
2,1
реле
К5 и
удерживается
на
самоблокировке контактами
5, 6
реле
Кб
через размыкающие контакты
4, 5
реле
К7.
Обмотка кра-
на останова включена через контакты
3,2
реле
Кб и
размыкающие кон-
такты
7, 8
реле
К7.
Реле останова АД отключают, оттянув
на
короткое
время кнопку
15. При
этом включится реле
К5
вывода
из
флюгерного
положения, размыкающее свои контакты
/, 2,
через которые поступа-
ет напряжение
на
обмотку реле
Кб по
цепи:
2,1 (К5) — 5,4 (К7) —
6,5 (Кб).
Контакты
2, 3
реле
Кб
разомкнутся
и
выключат электромаг-
нит
6
останова
АД.
Автоматическое флюгирование
по
сигналу отрицательной тяги.
Оно выполняется
при
режиме работы
АД
более
0,4#
ном
в
случае
по-
явления отрицательной тяги
(ОТ),
превышающей допустимое зна-
чение. Система автоматического флюгирования
по ОТ
находится
в
готовности
все
время полета
и
вступает
в
действие сразу
при
возник-
новении
ОТ.
Датчик автоматического флюгирования
по ОТ
располо-
жен
в
носке редуктора
и
состоит
из оси
редуктора
с ВВ и
упорного
подшипника. Подшипник прижат комплектом пружин
и
давлением
масла
в
полости
за
подшипником.
При
появлении
ОТ
втулка
ВВ от-
жимает упорный подшипник, соединяя маслосистему
со
сливом. Дав-
ление масла быстро падает, приводя
к
включению гидрореле
7 по от-
рицательной тяге
и
гидрореле
5
включения лампы сигнализации авто-
флюгирования. Гидрореле
7
включает питание первого реле флюгиро-
вания
КЗ и
реле сигнализации
К2.
Одновременно
с
появлением
ОТ
гидроавтоматика открывает доступ масла
из
маслосистемы высокого
давления регулятора частоты вращения
в
канал большого шага,
на-
чинается флюгирование
от
маслонасоса регулятора.
При включении реле
К2
включается цепь питания лампы
4
сигна-
лизации флюгирования, параллельная цепи, включенной через гид-
рореле
5.
Реле
КЗ
включает контактор флюгерного маслонасоса
3,
автомат времени флюгирования
11 и
второе реле флюгирования
К4.
Флюгерный маслонасос дополняет подачу масла
от
насоса регулятора.
Реле
К4
включает реле
Кб,
которое своими контактами
5, б
самобло-
кируется,
а
контактами
2, 3
включает клапан останова
6,
прекращая
подачу топлива
в АД. В
дальнейшем система работает
так же, как и
при автофлюгировании.
На
режимах работы менее 0,4А^
НОМ
автофлю-
гирование невозможно
по
отрицательной тяге. Предусмотрено также
запаздывание автофлюгирования
по
отрицательной тяге
на 4 ... 5 с
214
при резком уменьшении мощности (менее
0,4N
ном
),
если
до
этого была
отрицательная тяга, превышающая настройку датчика. Через
10 ••• 20 с
лопасти
ВВ
встанут
во
флюгерное положение. Автомат времени флю-
гирования выключит реле
КЗ и К2,
контактор флюгерного маслонасо-
са
и
реле
К4.
Реле
Кб
выключения
АД
остается включенным,
так как
самоблокируется контактами
2, 3.
Автоматическое флюгирование
по
предельной частоте вращения
выполняется
по
сигналу датчиков масловыключателем
8,
который
за-
мыкает свои контакты
и
включает реле
КЗ и К2. В
дальнейшем система
работает
так же, как и в
предыдущих случаях.
12.3. ПРИНУДИТЕЛЬНОЕ ФЛЮГИРОВАНИЕ
Для выполнения флюгирования отжимают кнопку флюгирования
15
(см рис 12 4) В
отжатом положении кнопка удерживается элек-
тромагнитом. Кнопкой
15
включается автомат времени флюгирования
// электромагнит
3
включения масляного насоса
и
второе реле
Д4
ввода
во
флюгерное положение. Электромагнит
3
включает флюгер-
ный масляный насос
1 и
лампу сигнализации
его
работы
2.
Контакты
2 3
реле
К4
включают реле останова
Кб,
которое своими контактами
/,
Лвключает клапан останова,
а
контактами
5, 6
самоблокируется. Пер-
вое реле флюгирования
КЗ и
реле сигнализации
К2 не
включается.
В дальнейшем система работает
так же, как при
автофлюгировании.
Через
10 20 с
автомат времени флюгирования разрывает минусовую
цепь электромагнита кнопки флюгирования, кнопка отходит
в
среднее
положение, выключается электромагнит
3
включения флюгерного
маслонасоса
/ и
реле
К4.
Реле
Кб и
клапан останова остаются вклю-
ченными
так как
реле
Кб
своими контактами
5, 6
самоблокируется.
Для
их
выключения нужно
на
короткое время оттянуть кнопку флю-
гирования
15 При
этом включается реле вывода
из
флюгерного поло-
жения
К5,
размыкающее цепь питания реле
Кб и
клапана останова.
Аварийное флюгирование
при
отказе
АД или
регулятора можно
выполнять, подводя
в
аварийную систему азот
из
магистрали
ВС.
где
он
находится
под
давлением
3-Ю
3
... 7-10
3
кПа. При
открывании
баллона азот поступает
в
трубопровод,
а
оттуда
к
золотнику ввода
во
флюгерное положение регулятора частоты вращения, который пере-
пускает масло
в
канал большого шага. Одновременно азот поступает
в систему аварийного останова
АД. Так как при
отказе
АД
винт
под
контролем регулятора частоты вращения продолжает вращаться,
то
маслонасос
не
прекращает подачу масла
в
канал большого шага.
Элек-
тромагнит клапана останова
в
этом случае можно включить выключате-
ЛеМ
Для
вывода лопастей
из
флюгерного положения кнопку оттягивают
и удерживают до выхода лопастей
из
этого положения При этом вклю-
чается
реле К5
флюгерный масляный насос
1.
Реле
К5
отключает реле
останова
Кб и
клапан останова
6.
Контакты
5, 6 К5
включают электро-
215
магнитный золотник вывода из флюгерного положения 12, который че-
рез элементы гидроавтоматики вывода из флюгерного положения со-
единяет канал высокого давления с каналов малого^ ш?га После
Я
лопас
™
и из
Флюгерного положения кнопку флюгирования
пуск™Й^;?
ИНТ
'
ВЫВеДеННЫЙ из
Ф™герного положения, после за-
пуск. АД переходит на автоматическую работу. При включении кноп-
ки флюгирования на вывод из флюгерного положения^автоматиче-
ски возобновляется подача топлива в двигатель. «матиче
Глава 13
ПОЖАРНОЕ ОБОРУДОВАНИЕ ВОЗДУШНЫХ СУДОВ
пож^Гппжя
0
п
бОРУДОВаНИе
СЛУЖИТ
о
ДЛЯ
"РеДотвращения и ликвидации
пожара. Пожароопасными зонами ВС являются отсеки маршевых АД
и ВСУ, топливные баки и магистрали, зоны топливных кранов и другие
отсеки и помещения, где имеется возможность возникновения пожара
ких пи
1
^^
6
"™
гермети
„
чнос
™' повреждений или разрушения ка-
ких-либо узлов топливной или масляной систем
Для предупреждения возникновения пожара вследствие неиспоав-
пеое^о7
Р
и
ИЧеСКИХ
ЦеП6Й
п
Р
именяют
за
Щ
ит
У
от
коротких замыканий,
ДГи статического электричества, возникающего от трения ВС
°
М
^Т
И При зап
Равке топливом. Информацию о пожаре вырабаты-
вают сигнализаторы, установленные в пожароопасных зонах. Пожар
тушат специальной жидкостью, преимущественно фреоном 114В2
^™Г
СЯ
В баллонах под
Давлением. Электрогидравлическая схе-
ноЛТ "
0Жара В 0ТС6КаХ
да
ига
телей (рис. 13.1) состоит из балло-
нов для хранения огнегасящей жидкости Б1 ... Б6 с пироголовками
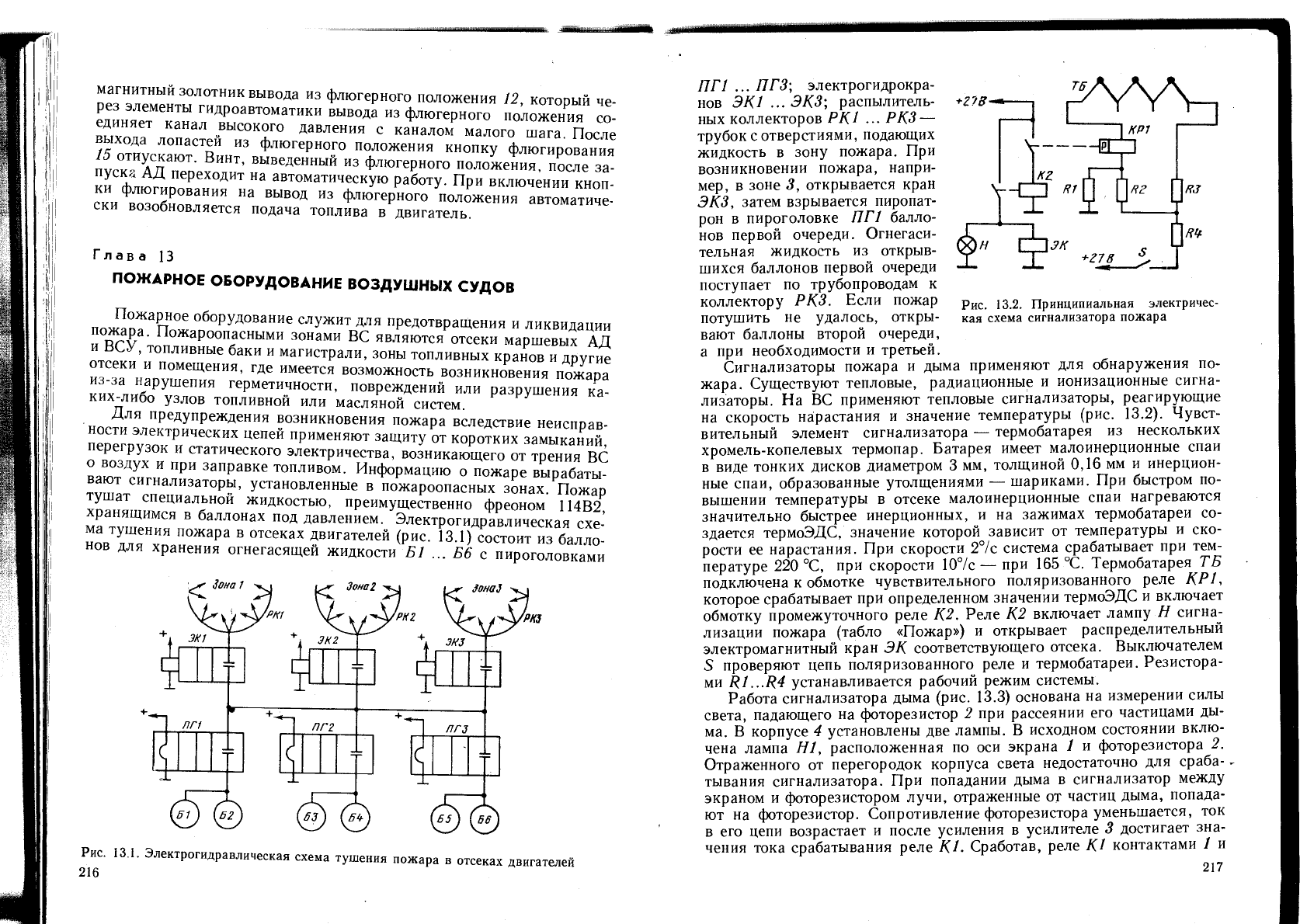
Рис.
13.1. Электрогидравлическая схема тушения пожара в отсеках двигателей
216
+Z78
Рис.
13.2. Принципиальная электричес-
кая схема сигнализатора пожара
ПП ... ПГЗ; электрогидрокра-
нов Ж1 ... ЭКЗ; распылитель-
ных коллекторов РК1 ... РКЗ —
трубок с отверстиями, подающих
жидкость в зону пожара. При
возникновении пожара, напри-
мер,
в зоне 3, открывается кран
ЭКЗ, затем взрывается пиропат-
рон в пироголовке ПГ1 балло-
нов первой очереди. Огнегаси-
тельная жидкость из открыв-
шихся баллонов первой очереди
поступает по трубопроводам к
коллектору РКЗ. Если пожар
потушить не удалось, откры-
вают баллоны второй очереди,
а при необходимости и третьей.
Сигнализаторы пожара и дыма применяют для обнаружения по-
жара. Существуют тепловые, радиационные и ионизационные сигна-
лизаторы. На ВС применяют тепловые сигнализаторы, реагирующие
на скорость нарастания и значение температуры (рис.
13.2).
Чувст-
вительный элемент сигнализатора — термобатарея из нескольких
хромель-копелевых термопар. Батарея имеет малоинерционные спаи
в виде тонких дисков диаметром 3 мм, толщиной 0,16 мм и инерцион-
ные спаи, образованные утолщениями — шариками. При быстром по-
вышении температуры в отсеке малоинерционные спаи нагреваются
значительно быстрее инерционных, и на зажимах термобатареи со-
здается термоЭДС, значение которой зависит от температуры и ско-
рости ее нарастания. При скорости 27с система срабатывает при тем-
пературе 220 °С, при скорости 107с — при 165 °С. Термобатарея ТБ
подключена к обмотке чувствительного поляризованного реле КР1,
которое срабатывает при определенном значении термоЭДС и включает
обмотку промежуточного реле К2. Реле К2 включает лампу Я сигна-
лизации пожара (табло «Пожар») и открывает распределительный
электромагнитный кран ЭК соответствующего отсека. Выключателем
S проверяют цепь поляризованного реле и термобатареи. Резистора-
ми R1...R4 устанавливается рабочий режим системы.
Работа сигнализатора дыма (рис. 13.3) основана на измерении силы
света, падающего на фоторезистор 2 при рассеянии его частицами ды-
ма. В корпусе 4 установлены две лампы. В исходном состоянии вклю-
чена лампа HI, расположенная по оси экрана / и фоторезистора 2.
Отраженного от перегородок корпуса света недостаточно для сраба-
тывания сигнализатора. При попадании дыма в сигнализатор между
экраном и фоторезистором лучи, отраженные от частиц дыма, попада-
ют на фоторезистор. Сопротивление фоторезистора уменьшается, ток
в его цепи возрастает и после усиления в усилителе 3 достигает зна-
чения тока срабатывания реле К1. Сработав, реле К1 контактами / и
217