Решетов С.А. Электроснабжение воздушных судов Учебник для вузов
Подождите немного. Документ загружается.

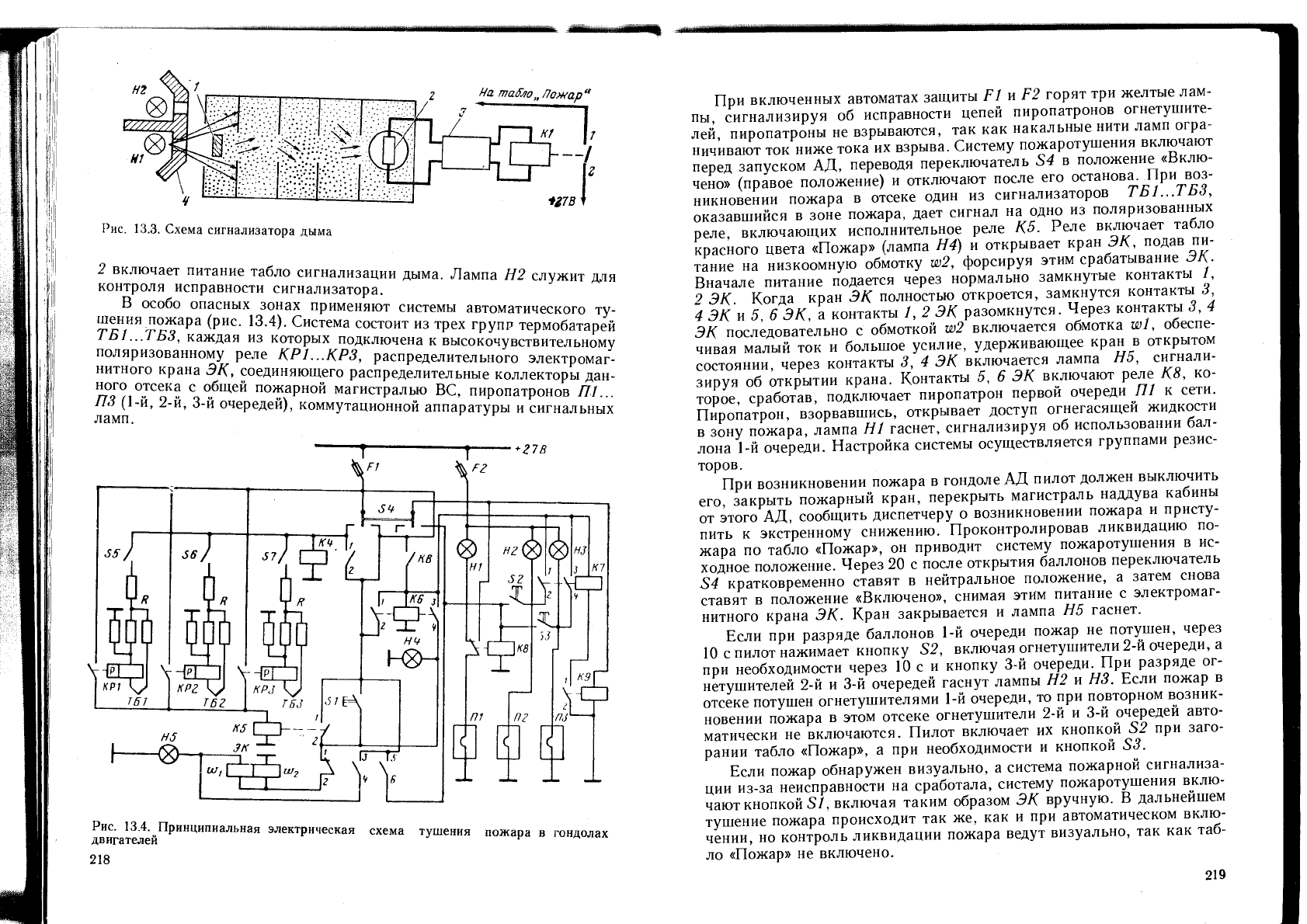
2 включает питание табло сигнализации дыма. Лампа Н2 служит для
контроля исправности сигнализатора.
В особо опасных зонах применяют системы автоматического ту-
™™
я
"
ожа
Р
а
(Р
ис
-
13
-
4
)-
Система состоит из трех групр термобатарей
ТБ1...ТБЗ, каждая из которых подключена к высокочувствительному
поляризованному реле КР1...КРЗ, распределительного электромаг-
нитного крана Ж, соединяющего распределительные коллекторы дан-
ного отсека с общей пожарной магистралью ВС, пиропатронов П1...
ПЗ (1-й, 2-й, 3-й очередей), коммутационной аппаратуры и сигнальных
ламп.
Н5
I
<8ь
т
пг
Рис.
13.4. Принципиальная электрическая схема тушения пожара в гондолах
двигателей
г
218
При включенных автоматах защиты F1 и F2 горят три желтые лам-
пы сигнализируя об исправности цепей пиропатронов огнетушите-
лей пиропатроны не взрываются, так как накальные нити ламп огра-
ничивают ток ниже тока их взрыва. Систему пожаротушения включают
перед запуском АД, переводя переключатель S4 в положение «Вклю-
чено» (правое положение) и отключают после его останова. _1[ривоз-
никновении пожара в отсеке один из сигнализаторов ТЬ1...1Ьд,
оказавшийся в зоне пожара, дает сигнал на одно из поляризованных
реле,
включающих исполнительное реле К5. Реле включает табло
красного цвета «Пожар» (лампа Н4) и открывает кран ЭК, подав пи-
тание на низкоомную обмотку w2, форсируя этим срабатывание ЭК .
Вначале питание подается через нормально замкнутые контакты 1,
2 ЭК Когда кран Ж полностью откроется, замкнутся контакты .1
4 ЭК и 5 6 ЭК, а контакты 1,2 ЭК разомкнутся. Через контакты 3, 4
ЭК последовательно с обмоткой w2 включается обмотка wl, обеспе-
чивая малый ток и большое усилие, удерживающее кран в открытом
состоянии, через контакты 3, 4 ЭК включается лампа Н5, сигнали-
зируя об открытии крана. Контакты 5, 6 ЭК включают реле К8, ко-
торое сработав, подключает пиропатрон первой очереди 111 к сети.
Пиропатрон, взорвавшись, открывает доступ огнегасящеи жидкости
в зону пожара, лампа HI гаснет, сигнализируя об использовании бал-
лона 1-й очереди. Настройка системы осуществляется группами резис-
торов.
При возникновении пожара в гондоле АД пилот должен выключить
его закрыть пожарный кран, перекрыть магистраль наддува кабины
от этого АД сообщить диспетчеру о возникновении пожара и присту-
пить к экстренному снижению. Проконтролировав ликвидацию по-
жара по табло «Пожар», он приводит систему пожаротушения в ис-
ходное положение. Через 20 с после открытия баллонов переключатель
S4 кратковременно ставят в нейтральное положение, а затем снова
ставят в положение «Включено», снимая этим питание с электромаг-
нитного крана ЭК. Кран закрывается и лампа Н5 гаснет.
Если при разряде баллонов 1-й очереди пожар не потушен, через
10 с пилот нажимает кнопку S2, включая огнетушители 2-й очереди, а
при необходимости через 10 с и кнопку 3-й очереди При разряде ог-
нетушителей 2-й и 3-й очередей гаснут лампы Н2 и НЗ. Если пожар в
отсеке потушен огнетушителями 1-й очереди, то при повторном возник-
новении пожара в этом отсеке огнетушители 2-й и 3-й очередей авто-
матически не включаются. Пилот включает их кнопкой Ь2 при заго-
рании табло «Пожар», а при необходимости и кнопкой S3.
Если пожар обнаружен визуально, а система пожарной сигнализа-
ции из-за неисправности на сработала, систему пожаротушения вклю-
чают кнопкой S1, включая таким образом ЭК вручную. В дальнейшем
тушение пожара происходит так же, как и при автоматическом вклю-
чении, но контроль ликвидации пожара ведут визуально, так как таб-
ло «Пожар» не включено.
219
Ha табло
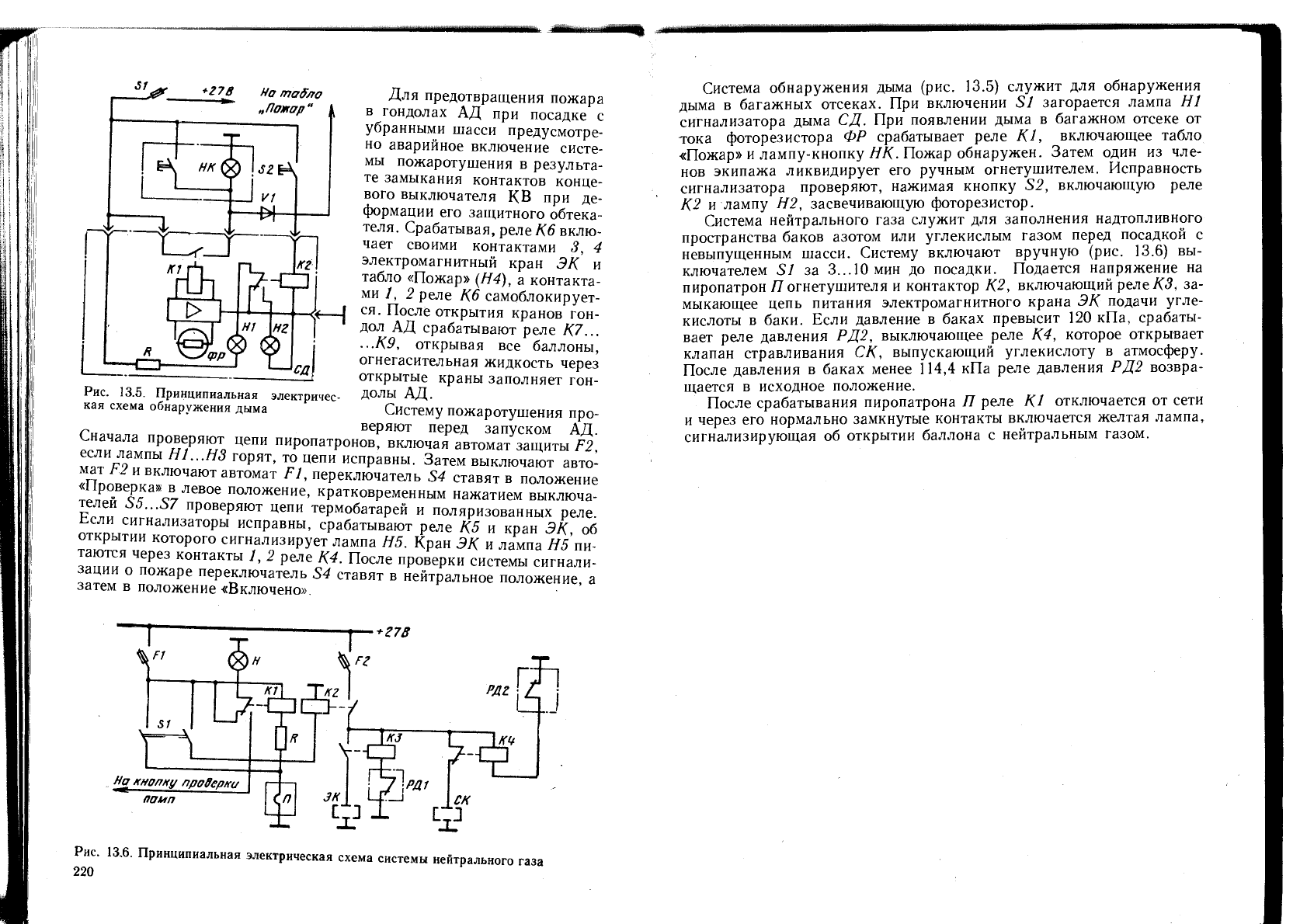
Рис.
13.5. Принципиальная электричес-
кая схема обнаружения дыма
Для предотвращения пожара
в гондолах АД при посадке с
убранными шасси предусмотре-
но аварийное включение систе-
мы пожаротушения в результа-
те замыкания контактов конце-
вого выключателя
К В
при де-
формации его защитного обтека-
теля. Срабатывая, реле Кб вклю-
чает своими контактами 3, 4
электромагнитный кран ЭК и
табло «Пожар» (Н4), а контакта-
ми /, 2 реле Кб самоблокирует-
ся.
После открытия кранов гон-
дол АД срабатывают реле К7...
...К9,
открывая все баллоны,
огнегасительная жидкость через
открытые краны заполняет гон-
долы АД.
Систему пожаротушения про-
веряют перед запуском АД.
r
U
o„„„
всриюг перед запуском АД.
сначала проверяют цепи пиропатронов, включая автомат защиты F2
если лампы
Н1...НЗ
горят, то цепи исправны. Затем выключают авто-
мат ^ и включают автомат F1, переключатель S4 ставят в положение
™°й
Ве
Р
ка>>
с
в
7
ЛеВое полож
ение, кратковременным нажатием выключа-
телей
ьь...Ъ7
проверяют цепи термобатарей и поляризованных реле
Если сигнализаторы исправны, срабатывают реле К5 и кран ЭК об
открытии которого сигнализирует лампа Н5. Кран ЭК и лампа #5'пи-
таюгся через контакты /, 2 реле К4. После проверки системы сигнали-
зации о пожаре переключатель S4 ставят в нейтральное положение а
затем в положение «Включено».
Система обнаружения дыма (рис. 13.5) служит для обнаружения
дыма в багажных отсеках. При включении S1 загорается лампа HI
сигнализатора дыма СД. При появлении дыма в багажном отсеке от
тока фоторезистора ФР срабатывает реле Д7, включающее табло
«Пожар» и лампу-кнопку НК. Пожар обнаружен. Затем один из чле-
нов экипажа ликвидирует его ручным огнетушителем. Исправность
сигнализатора проверяют, нажимая кнопку S2, включающую реле
К2
и лампу Н2, засвечивающую фоторезистор.
Система нейтрального газа служит для заполнения надтопливного
пространства баков азотом или углекислым газом перед посадкой с
невыпущенным шасси. Систему включают вручную (рис. 13.6) вы-
ключателем S1 за
3...10
мин до посадки. Подается напряжение на
пиропатрон Я огнетушителя и контактор К2, включающий реле КЗ, за-
мыкающее цепь питания электромагнитного крана Ж подачи угле-
кислоты в баки. Если давление в баках превысит 120 кПа, срабаты-
вает реле давления РД2, выключающее реле К4, которое открывает
клапан стравливания СК, выпускающий углекислоту в атмосферу.
После давления в баках менее 114,4 кПа реле давления РД2 возвра-
щается в исходное положение.
После срабатывания пиропатрона Я реле К1 отключается от сети
и через его нормально замкнутые контакты включается желтая лампа,
сигнализирующая об открытии баллона с нейтральным газом.
РАЗДЕЛ Mi
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ АГРЕГАТАМИ
И УСТРОЙСТВАМИ, РАБОТАЮЩИМИ
В АЭРОДИНАМИЧЕСКОМ ПОТОКЕ
Глава 14
ЭЛЕКТРООБОРУДОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ САМОЛЕТОМ
14.1. ОБЩИЕ СВЕДЕНИЯ
Система управления ВС служит для формирования, преобразова-
ния и использования сигнала управления ВС и стабилизации парамет-
ров его полета.
Различают несколько типов систем управления. Механическая
система обеспечивает управление ВС с помощью тяг и тросов от руч-
ки (штурвала) к рулевым поверхностям.
Исполнительным элементом электромеханической системы управле-
ния электромеханического следящего привода рулевых поверхностей
являются электрические рулевые машины. Гидравлический следя-
щий привод совершает работу по перемещению управляющих поверх-
ностей гидродвигателем (ГД), получая энергию от гидросистемы. Гид-
родвигатель часто называют бустером, а гидравлическую систему уп-
равления _гидродвигателей — бустерной. Существуют необратимый и
обратимый гидравлические приводы. В необратимом приводе отсутст-
вует обратная связь, передающая противодействующий момент с ру-
лей на штурвал, и при любом угле отклонения штурвала пилот ощуща-
ет лишь силы трения в проводке и датчиках. Это лишает его собст-
венных ощущений о режиме управления. Такой необратимый при-
вод усложняет управление ВС. Психологически более удобен обрати-
мый гидравлический следящий привод, обеспечивающий передачу на
штурвал усилий, действующих на рулевые поверхности.
Существуют три разновидности гидравлических следящих при-
водов.
В электрогидромеханическом следящем приводе ГД привода ру-
левых поверхностей управляется как электрически (электрогидро-
привод), так и механически через систему тяг (механическая про-
водка).
г
В гидромеханическом следящем приводе используется ГД с ме-
ханической проводкой к нему от педалей.
В электрогидравлическом приводе (электродистанционная систе-
ма управления) ГД управляется только электрическими сигналами.
Так, например, электродистанционная система установлена на само-
летах Ту-204 и Ил-96-300.
222
14.2. ЭЛЕКТРООБОРУДОВАНИЕ СИСТЕМ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
В полете на каждый единичный элемент поверхности ВС со сторо-
ны обтекаемой газовой среды действуют нормальные и касательные
напряжения. Они могут быть приведены к одному главному вектору
аэродинамических сил и главному вектору момента этих сил относи-
тельно точки приведения на ВС.
Управление положением ВС сводится к изменению силы и момента
путем отклонения управляющих поверхностей — рулей направления
и высоты элеронов и т. д. Отклонение такой поверхности вызывает
реакцию аэродинамического потока — шарнирный момент относитель-
но оси ее вращения. При больших скоростях полета и больших пло-
щадях управляющих поверхностей мускульного усилия пилота уже
недостаточно для отклонения рулей на нужный угол и с нужной ско-
ростью. В этом случае для отклонения рулей необходимо использовать
ЭД и ГД.
Атмосфера состоит из турбулентных зон различной протяженнос-
ти и интенсивности, непрерывно переходящих одна в другую по го-
ризонтали и вертикали. Турбулентность имеет случайный характер.
В областях со средней турбулентностью имеются кратковременные
весьма интенсивные воздушные порывы большой скорости. ВС под-
вергается вертикальным переменным нагрузкам и перегрузкам, осо-
бенно при переходе из одной зоны в другую. Их парирование произ-
водится отклонением рулей.
Переменная нагрузка на рули ведет к тому, что приводные устрой-
ства рулей и их электрооборудование практически весь полет работа-
ют в переходном режиме. В таком режиме в электрооборудовании воз-
никают переменные и импульсные электрические токи и напряжения,
понижается к. п. д. и возрастают потери, что ведет не только к элект-
рическим но и к тепловым перегрузкам. Если учесть еще и большую
роль системы управления ВС в безопасности полета, то очевидно, что
это электрооборудование нуждается в особо тщательном контроле и
обслуживании.
При переменной нагрузке на рули большую роль играют устойчи-
вость и управляемость ВС. Для повышения устойчивости самолета пу-
тем введения в закон его управления отрицательной обратной связи
по угловой скорости используют демпфер. Чувствительным элемен-
том демпфера (рис. 14.1) является
датчик угловой скорости ДУС ко-
лебаний ВС. Собственная частота
недемпфированных колебаний 6...
10 Гц, на ВС нового поколения —
десятки герц. Сигнал с ДУС по-
дается на блок передаточного отно-
шения БПО, служащий для изме-
нения коэффициента усиления В Рис. 14.1. Схема демпфера канала
223
Р
ryt Р
РУВ
-
БПО
ВС Н
д~ус\^
V
М р Н т„
аь-
Ф — УС
A3
П|
РАН |3Z
ГУ
ВС
ГсГсти
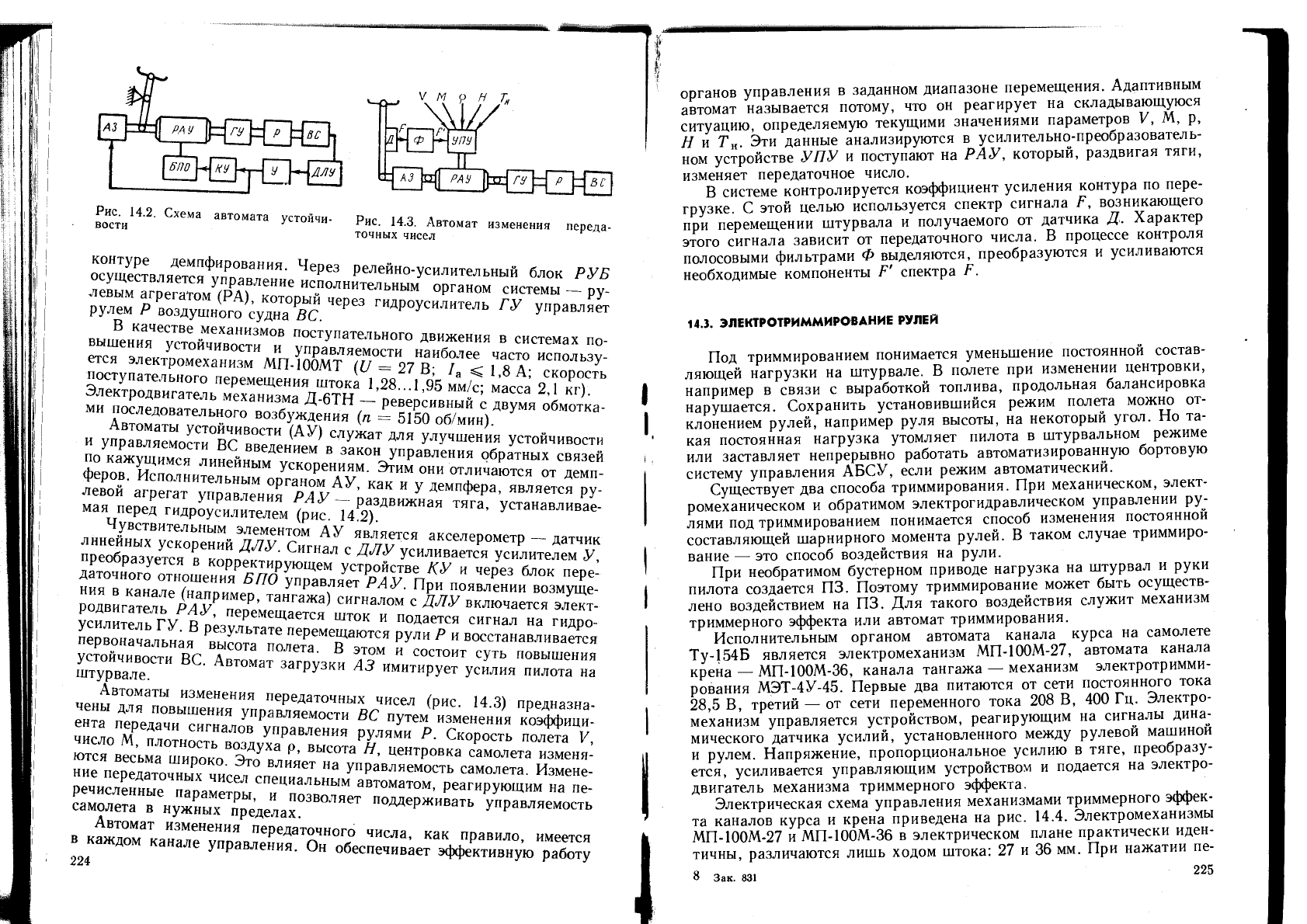
142
'
СХ6Ма автомата
У«ойчи-
Рис. 14.3.
Автомат
точных чисел
изменения переда-
о^ест\ля?тся^Г
Я
-
ЧбРе3
Р
еле
йно-усилительный блок
РУБ
TJS^n^Jm^
*
™нительным органом системы
- ру-
P^S^Baa^^SSc
44,63 ГИД
Р°У
СИ
™ь
ГУ
у
Правля
Р
е
У
т
вьш
В
енГТтойТиГстГи
В
^
ител
ь
Н
ого движения
в
системах
по-
ется элект^ ™
b3y
-
i^-^S^^
U8 Л 9
'
5
^
МаС
-
2
'
ГГ)СТЬ
-"ательнГв^
и
Д™;2о?^
И
!Г
И (АУ)
тЖаТ
ДЛЯ
У^ния устойчивости
поЧ^£^™*^Г™
В
3акон
-Управления обратных связей
АРППГС
линейным ускорениям. Этим
они
отличаются
от
демп-
мая
переГг^о^иГег(pic
7/
аЗДВИЖНая
™га.
устанавливае-
л
Н
не&^ен^йД^
г
„1
У
Т/Г"
—рометр
-
датчик
преобразуется
V^nnno
Л С
усиливается усилителем
У,
«^^Ж^^яЖ^»
^
бЛ0К
пер^
ния
R
кяняттс /оог,^ управляет ^л<у.
При
появлении возмуще-
£Z^№T3£^S£??L
с дау
•«-««»
-
усилитель
ГУ R
и
подается сигнал
на
гидро-
ни^
передаточнь^^чиг^п
ЛИЯеТ
На
У
правляем
<*ть самолета. Измене-
органов управления
в
заданном диапазоне перемещения. Адаптивным
автомат называется потому,
что он
реагирует
на
складывающуюся
ситуацию, определяемую текущими значениями параметров
V, М, р,
Я
и Т„ Эти
данные анализируются
в
усилительно-преобразователь-
ном устройстве
УПУ и
поступают
на РАУ,
который, раздвигая тяги,
изменяет передаточное число.
В системе контролируется коэффициент усиления контура
по
пере-
грузке.
С
этой целью используется спектр сигнала
F,
возникающего
при перемещении штурвала
и
получаемого
от
датчика
Д.
Характер
этого сигнала зависит
от
передаточного числа.
В
процессе контроля
полосовыми фильтрами
Ф
выделяются, преобразуются
и
усиливаются
необходимые компоненты
F'
спектра
F.
14.3.
ЭЛЕКТРОТРИММИРОВАНИЕ РУЛЕЙ
Под триммированием понимается уменьшение постоянной состав-
ляющей нагрузки
на
штурвале.
В
полете
при
изменении центровки,
например
в
связи
с
выработкой топлива, продольная балансировка
нарушается. Сохранить установившийся режим полета можно
от-
клонением рулей, например руля высоты,
на
некоторый угол.
Но та-
кая постоянная нагрузка утомляет пилота
в
штурвальном режиме
или заставляет непрерывно работать автоматизированную бортовую
систему управления АБСУ, если режим автоматический.
Существует
два
способа триммирования.
При
механическом, элект-
ромеханическом
и
обратимом электрогидравлическом управлении
ру-
лями под триммированием понимается способ изменения постоянной
составляющей шарнирного момента рулей.
В
таком случае триммиро-
вание
— это
способ воздействия
на
рули.
При необратимом бустерном приводе нагрузка
на
штурвал
и
руки
пилота создается
ПЗ.
Поэтому триммирование может быть осуществ-
лено воздействием
на ПЗ. Для
такого воздействия служит механизм
триммерного эффекта
или
автомат триммирования.
Исполнительным органом автомата канала курса
на
самолете
Ту-154Б является электромеханизм МП-100М-27, автомата канала
крена
—
МП-100М-36, канала тангажа
—
механизм электротримми-
рования МЭТ-4У-45. Первые
два
питаются
от
сети постоянного тока
28,5 В,
третий
— от
сети переменного тока
208 В, 400 Гц.
Электро-
механизм управляется устройством, реагирующим
на
сигналы дина-
мического датчика усилий, установленного между рулевой машиной
и рулем. Напряжение, пропорциональное усилию
в
тяге, преобразу-
ется, усиливается управляющим устройством
и
подается
на
электро-
двигатель механизма триммерного эффекта.
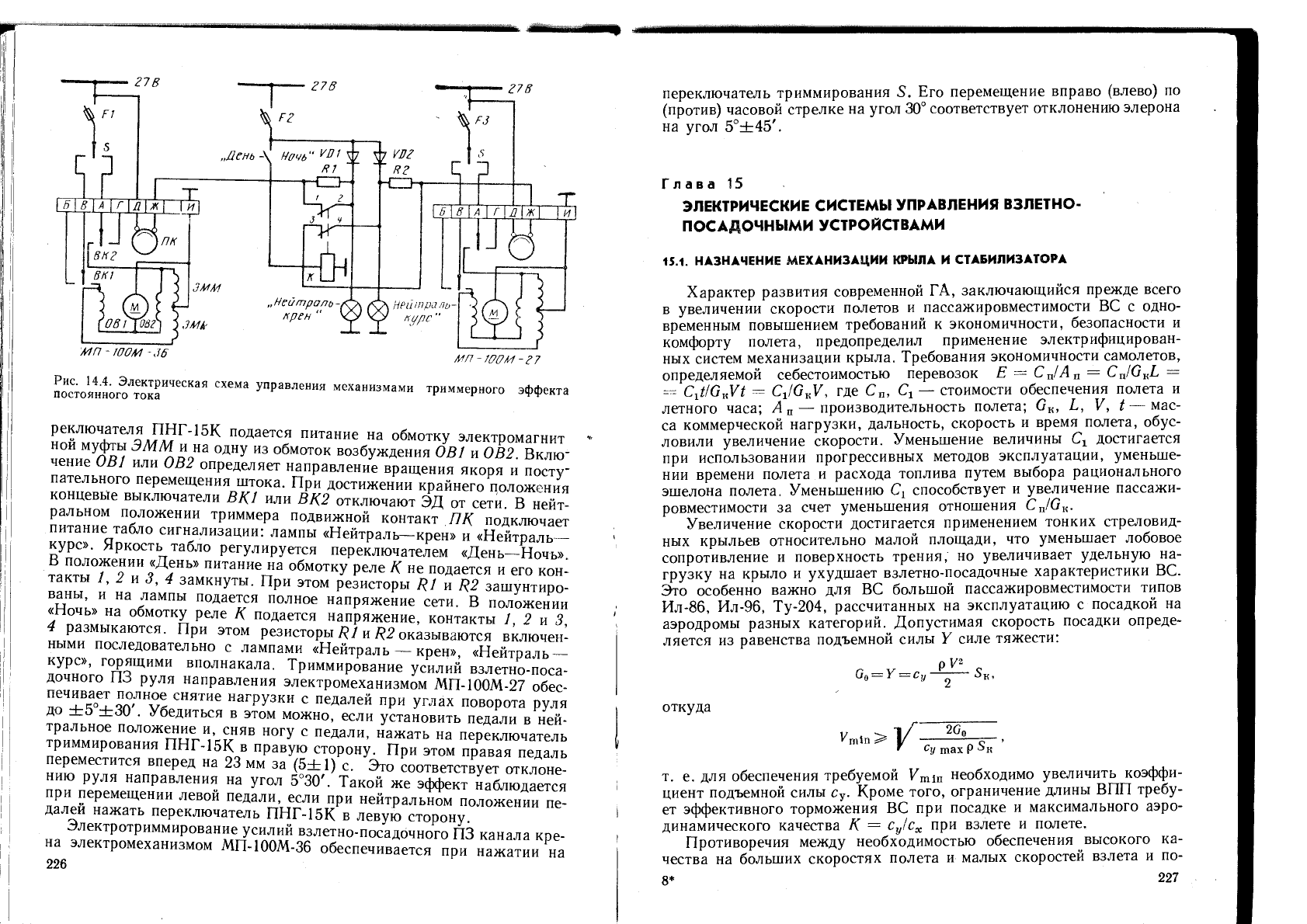
Электрическая схема управления механизмами триммерного эффек-
та каналов курса
и
крена приведена
на рис. 14.4.
Электромеханизмы
МП-100М-27
и
МП-100М-36
в
электрическом плане практически иден-
тичны, различаются лишь ходом штока:
27 и 36 мм. При
нажатии
пе-
8 Зак. 831
225
27 В
27В
27B
МП
-10ОМ -36
МП -ГООМ-27
п
5
остошшого^ока
ИЧеСКаЯ
™™
уп
Р
авления
механизмами триммерного эффекта
реключателя ПНГ-15К подается питание
на
обмотку электромагнит
ной муфты
ЭММ и на
одну
из
обмоток возбуждения
0В1 и 0В2.
Вклю-
чение
UB1 или 0В2
определяет направление вращения якоря
и
посту-
пательного перемещения штока.
При
достижении крайнего положения
концевые выключатели
ВК1 или
В К
2
отключают
ЭД от
сети
В
нейт-
ральном положении триммера подвижной контакт
ПК
подключает
питание табло сигнализации: лампы «Нейтраль—крен»
и
«Нейтраль
-
курс». Яркость табло регулируется переключателем «День-Ночь»
тя^Т?
Ш,
Л
ЕНЬ1
ПИТШШе
'
1а обмотк
У
Р
еле
К
»е
подается
и его
кон^
такты
1, J и 3, 4
замкнуты.
При
этом резисторы
R1 и R2
зашунтиро-
ваны,
и на
лампы подается полное напряжение сети.
В
положении
«Ночь»
на
обмотку реле
К
подается напряжение, контакты
1,2 иЗ
4
размыкаются.
При
этом резисторы
R1 и R2
оказываются включегь
ными последовательно
с
лампами «Нейтраль
—
крен», «Нейтраль
-
курс», горящими вполнакала. Триммирование усилий взлетно-поса-
дочного
lid
руля направления электромеханизмом МП-100М-27 обес-
ТГ^Х^Т
СНЯ
™
е Harpy3K,f
с
педалей
"Р" У^ах
поворота руля
ДО
±5
±30 .
Уоедиться
в
этом можно, если установить педали
в
ней-
тральное положение
и,
сняв ногу
с
педали, нажать
на
переключатель
триммирования ПНГ-15К
в
правую сторону.
При
этом правая педаль
переместится вперед
на 23 мм за (5±1) с. Это
соответствует отклоне
нию руля направления
на
угол 5°30'. Такой
же
эффект наблюдается
при перемещении левой педали, если
при
нейтральном положении
пе-
далей нажать переключатель ПНГ-15К
в
левую сторону
Электротриммирование усилий взлетно-посадочного
ПЗ
канала кре-
на электромеханизмом МП-100М-36 обеспечивается
при
нажатии
на
226
переключатель триммирования
S. Его
перемещение вправо (влево)
по
(против) часовой стрелке
на
угол 30° соответствует отклонению элерона
на угол 5°±45'.
Г
л
а в а 15
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ
УПРАВЛЕНИЯ ВЗЛЕТНО-
ПОСАДОЧНЫМИ
УСТРОЙСТВАМИ
15.1.
НАЗНАЧЕНИЕ МЕХАНИЗАЦИИ КРЫЛА
И
СТАБИЛИЗАТОРА
Характер развития современной
ГА,
заключающийся прежде всего
в увеличении скорости полетов
и
пассажировместимости
ВС с
одно-
временным повышением требований
к
экономичности, безопасности
и
комфорту полета, предопределил применение электрифицирован-
ных систем механизации крыла. Требования экономичности самолетов,
определяемой себестоимостью перевозок
Е =
CJA
n
=
CJG
K
L
—
C^/GjfVt
=
C
t
/G
K
V,
где C
n
, C
t
—
стоимости обеспечения полета
и
летного часа;
А
п
—
производительность полета;
G
K
, L, V, t —
мас-
са коммерческой нагрузки, дальность, скорость
и
время полета, обус-
ловили увеличение скорости. Уменьшение величины
С
г
достигается
при использовании прогрессивных методов эксплуатации, уменьше-
нии времени полета
и
расхода топлива путем выбора рационального
эшелона полета. Уменьшению
С
х
способствует
и
увеличение пассажи-
ровместимости
за
счет уменьшения отношения
CJG
K
.
Увеличение скорости достигается применением тонких стреловид-
ных крыльев относительно малой площади,
что
уменьшает лобовое
сопротивление
и
поверхность трения,
но
увеличивает удельную
на-
грузку
на
крыло
и
ухудшает взлетно-посадочные характеристики
ВС.
Это особенно важно
для ВС
большой пассажировместимости типов
Ил-86,
Ил-96, Ту-204, рассчитанных
на
эксплуатацию
с
посадкой
на
аэродромы разных категорий. Допустимая скорость посадки опреде-
ляется
из
равенства подъемной силы
Y
силе тяжести:
G
0
= r =
c
,,-*y-S
K
,
откуда
т.
е. для
обеспечения требуемой
V
mln
необходимо увеличить коэффи-
циент подъемной силы
с
у
.
Кроме того, ограничение длины
ВПП
требу-
ет эффективного торможения
ВС при
посадке
и
максимального аэро-
динамического качества
К =
с
у
1с
х
при
взлете
и
полете.
Противоречия между необходимостью обеспечения высокого
ка-
чества
на
больших скоростях полета
и
малых скоростей взлета
и по-
8* 227
садки разрешаются применением механизации крыла, изменяющей
аэродинамические характеристики ВС. Механизируют как переднюю,
так и^заднюю кромку крыла, чаще заднюю. Из средств механизации
задней кромки наиболее эффективны выдвижные закрылки (одно-,
двух- и трехщелевые), передней кромки — предкрылки. Предкрылки
препятствуют срыву потока на передней верхней поверхности крыла
при больших углах атаки, увеличивая допустимый угол выпуска
закрылков, и увеличивают подъемную силу на взлете, при заходе на
посадку и посадке. К механизации крыла относятся также интерцеп-
торы, расположенные на верхней поверхности перед закрылками. Они
имеют обычно несколько секций. Внутренние повышают эффективность
торможения при посадке и прерванном взлете. Средние являются сред-
ством управления подъемной силой и сопротивлением самолета при
снижении и торможении при пробеге. Внешние секции в дифференци-
альном режиме работы используют и для повышения поперечной уп-
равляемости, отклоняя их совместно с соответствующим элероном.
JTa многих ВС для обеспечения продольной балансировки, устойчи-
вости и управляемости осуществляется перестановка стабилизатора.
В полете стабилизатор может работать совместно с расположенным на
нем рулем высоты, обеспечивая его положение вблизи нейтрального.
15.2. СИСТЕМЫ УПРАВЛЕНИЯ МЕХАНИЗАЦИЕЙ КРЫЛА
И СТАБИЛИЗАТОРОМ
Для привода этих устройств обычно применяются механизмы повы-
шения надежности (МПН) с двумя электрическими или гидравличес-
кими двигателями, работающими через дифференциальный редуктор
на общий выходной вал. Электрические МПН имеют мощность до
6 кВт (МПН привода закрылков МПЗ-9 самолета Ил-62 оборудован
двумя ЭД типа АДС-3000 мощностью по 3 кВт каждый). При большей
мощности применяются, как правило, МПН с гидродвигателями,
имеющими более высокие удельные мощности
~Р
и быстродействие.
Так, МПН привода закрылков РП-60 самолета Ту-154 имеют выход-
ную мощность Р
2
« 10 кВт при массе т = 50 кг, т. е.
~р
= Р
2
/т —
- 10/50 = 0,2 кВт/кг. Для МПЗ-9
~р
= Р
2
/т = 6/43 = 0,14 кВт/кг.
Специфичность условий работы этих устройств в зоне аэродинамичес-
кого потока, повышенные требования к надежности, общность харак-
тера нагрузки, однотипность структуры приводов предопределили
унификацию систем управления ими. Здесь эти системы рассматрива-
ются в основном применительно к самолету Ту-154. Особенности, ха-
рактерные для управления приводом постоянного тока, рассмотрены
на примере МПН типа МПЗ-18А-5 привода закрылков самолета
Ту-134А.
На самолете Ту-154 применено электрическое управление пред-
крылками с помощью МПН ЭПВ-8П, оборудованного двумя ЭД типа
228
АДС-600 мощностью по 0,8 кВт каждый, электрическое управление
стабилизатором с помощью МПН МУС-ЗПТВ, оборудованного двумя
ЭД типа АДС-1000 мощностью по 1 кВт и электрогидравлическое уп-
равление закрылками следящей системой СПЗ-1А, оборудованной
гидроприводом, работающим в релейном режиме по сигналам, выра-
батываемым блоком усиления и коммутации. Интерцепторы имеют че-
тыре секции на каждом полукрыле. Внешние работают в дифференци-
альном режиме совместно с элеронами. Две средние могут быть откло-
нены до 45°. Управление ими осуществляется из кабины пилотов
Привод интерцепторов гидравлический: внешних и средних секций —
рулевыми приводами, внутренних — гидроцилиндрами.
На самолете Ту-154А применено совмещенное управление закрыл-
ками, предкрылками и стабилизатором от рукоятки управления за-
крылками, что повышает надежность управления, обеспечивает взаи-
мосогласованное положение средств механизации и уменьшает число
выполняемых операций с 46 до 8. Возможность раздельного управле-
ния системами сохранена. Системы электропитания приводов пред-
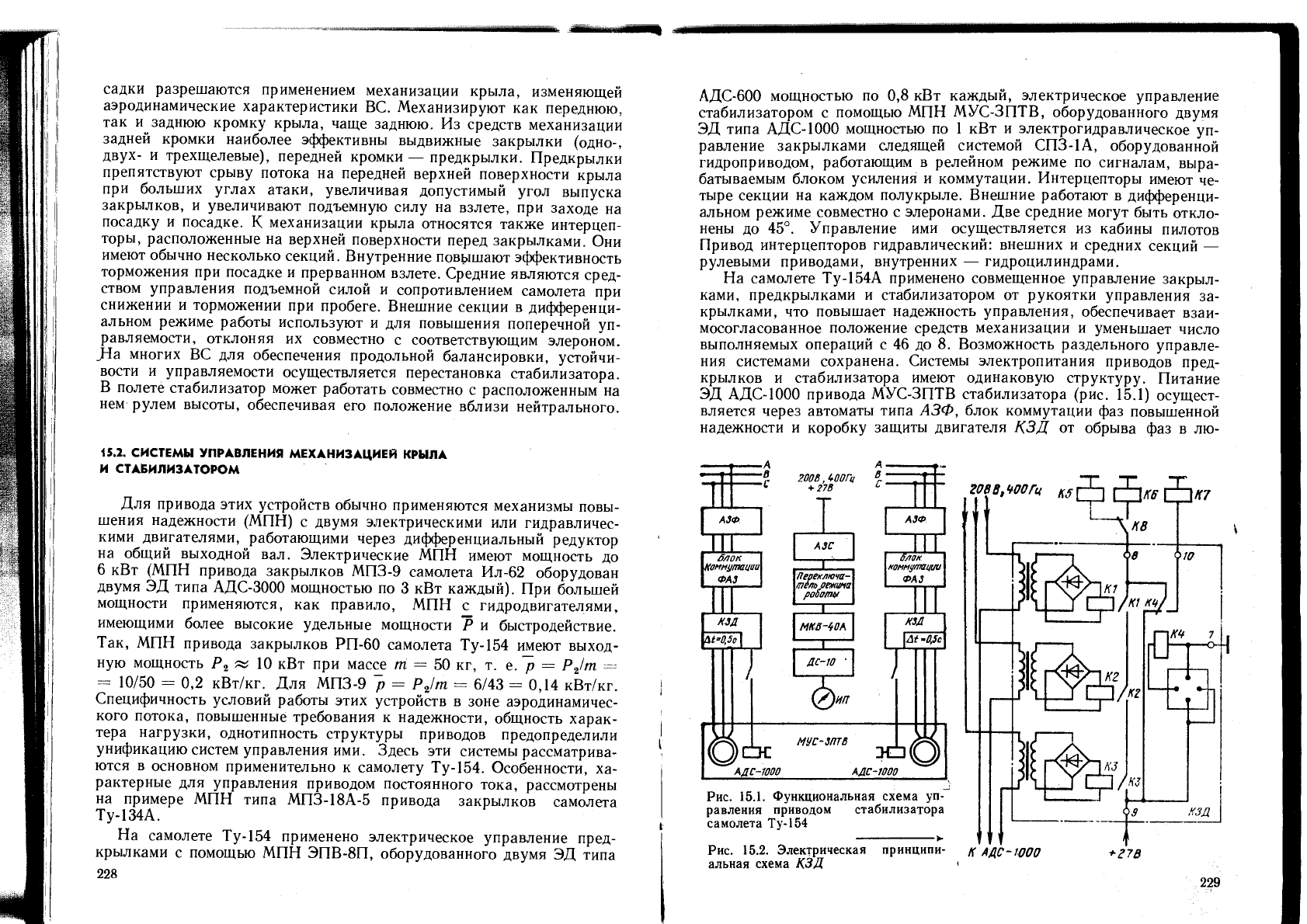
крылков и стабилизатора имеют одинаковую структуру. Питание
ЭД АДС-1000 привода МУС-ЗПТВ стабилизатора (рис. 15.1) осущест-
вляется через автоматы типа АЗФ, блок коммутации фаз повышенной
надежности и коробку защиты двигателя КЗД от обрыва фаз в лю-
АЗФ
тгг
блок
коммутации
ФАЗ
КЗД
200В,
ШГи
В
г'
+
27В
1
'
АЗС
X
Переключа-
тели оежта
работы
—г~
мкв-ш
ДС-10 '
0т
IOC
АДС-1000
МУС-ЗПТВ
АЗФ
Блок
коммутации
ФАЗ
КЗД
Ш-OJc
АДС-1000
Рис.
15.1. Функциональная схема уп-
равления приводом стабилизатора
самолета Ту-154
Рис.
15.2. Электрическая принципи-
альная схема КЗД
208
В,400Гц KS
К
АДС-1000
229
+Z73-
кг
/rjFj
к.з
)
<-Z78
Уборка
^
выпуск
К1
/
I Ы
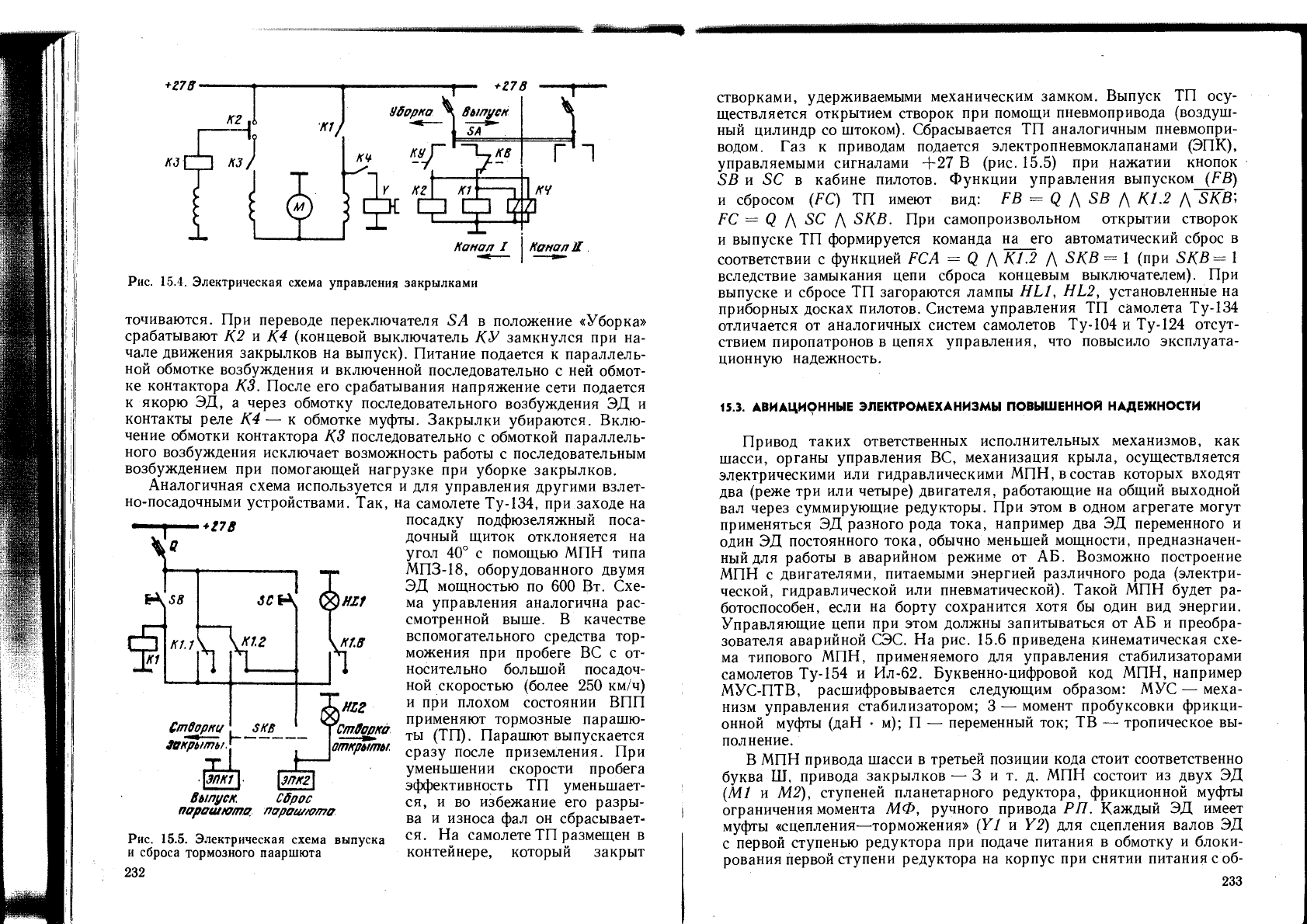
Рис.
15.4.
Электрическая схема управления закрылками
Г
"I
Канал
I
Канал
Ж
точиваются.
При
переводе переключателя
SA в
положение «Уборка»
срабатывают
К2 и К4
(концевой выключатель
КУ
замкнулся
при на-
чале движения закрылков
на
выпуск). Питание подается
к
параллель-
ной обмотке возбуждения
и
включенной последовательно
с ней
обмот-
ке контактора
КЗ.
После
его
срабатывания напряжение сети подается
к якорю
ЭД, а
через обмотку последовательного возбуждения
ЭД и
контакты реле
К4 — к
обмотке муфты. Закрылки убираются. Вклю-
чение обмотки контактора
КЗ
последовательно
с
обмоткой параллель-
ного возбуждения исключает возможность работы
с
последовательным
возбуждением
при
помогающей нагрузке
при
уборке закрылков.
Аналогичная схема используется
и для
управления другими взлет-
но-посадочными устройствами.
Так, на
самолете Ту-134,
при
заходе
на
посадку подфюзеляжный поса-
дочный щиток отклоняется
на
угол
40° с
помощью
МПН
типа
МПЗ-18,
оборудованного двумя
ЭД мощностью
по 600 Вт.
Схе-
ма управления аналогична рас-
смотренной выше.
В
качестве
вспомогательного средства тор-
можения
при
пробеге
ВС с от-
носительно большой посадоч-
ной скоростью (более
250 км/ч)
и
при
плохом состоянии
ВПП
применяют тормозные парашю-
ты
(ТП).
Парашют выпускается
сразу после приземления.
При
уменьшении скорости пробега
эффективность
ТП
уменьшает-
ся,
и во
избежание
его
разры-
ва
и
износа
фал он
сбрасывает-
ся.
На
самолете
ТП
размещен
в
контейнере, который закрыт
HL1
К1.3
HZ2
СтОорка
открыты
\ЭПК1\
Выпуск
парашюта.
эпкг\
сброс
параш/о/па
Рис.
15.5.
Электрическая схема выпуска
и сброса тормозного пааршюта
232
створками, удерживаемыми механическим замком. Выпуск
ТП
осу-
ществляется открытием створок
при
помощи пневмопривода (воздуш-
ный цилиндр
со
штоком). Сбрасывается
ТП
аналогичным пневмопри-
водом.
Газ к
приводам подается электропневмоклапанами (ЭПК),
управляемыми сигналами
+27 В (рис. 15.5) при
нажатии кнопок
SB
и SC в
кабине пилотов. Функции управления выпуском
(FB)
и сбросом
(FC) ТП
имеют
вид: FB = Q Д SB Д
К
1.2 Д1ЩЗ;
FC
= Q Д SC Д SKB. При
самопроизвольном открытии створок
и выпуске
ТП
формируется команда
на его
автоматический сброс
в
соответствии
с
функцией
FCA = Q Д К1.2 Д SKB = 1 (при
SKB=
1
вследствие замыкания цепи сброса концевым выключателем).
При
выпуске
и
сбросе
ТП
загораются лампы
HL1, HL2,
установленные
на
приборных досках пилотов. Система управления
ТП
самолета Ту-134
отличается
от
аналогичных систем самолетов Ту-104
и
Ту-124 отсут-
ствием пиропатронов
в
цепях управления,
что
повысило эксплуата-
ционную надежность.
15.3.
АВИАЦИОННЫЕ ЭЛЕКТРОМЕХАНИЗМЫ ПОВЫШЕННОЙ НАДЕЖНОСТИ
Привод таких ответственных исполнительных механизмов,
как
шасси, органы управления
ВС,
механизация крыла, осуществляется
электрическими
или
гидравлическими
МПН, в
состав которых входят
два (реже
три или
четыре) двигателя, работающие
на
общий выходной
вал через суммирующие редукторы.
При
этом
в
одном агрегате могут
применяться
ЭД
разного рода тока, например
два ЭД
переменного
и
один
ЭД
постоянного тока, обычно меньшей мощности, предназначен-
ный
для
работы
в
аварийном режиме
от АБ.
Возможно построение
МПН
с
двигателями, питаемыми энергией различного рода (электри-
ческой, гидравлической
или
пневматической). Такой
МПН
будет
ра-
ботоспособен, если
на
борту сохранится хотя
бы
один
вид
энергии.
Управляющие цепи
при
этом должны запитываться
от АБ и
преобра-
зователя аварийной
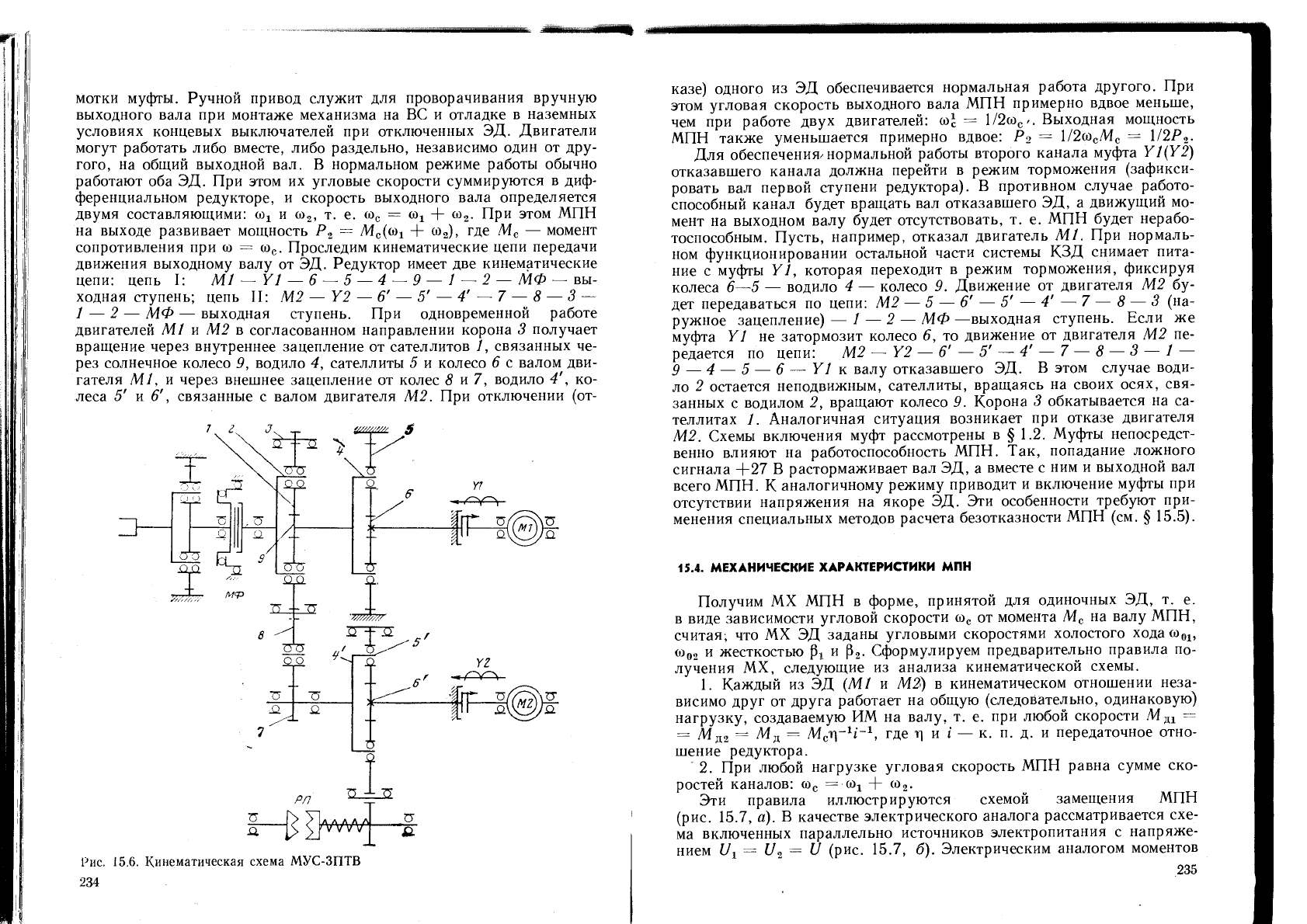
СЭС. На рис. 15.6
приведена кинематическая схе-
ма типового
МПН,
применяемого
для
управления стабилизаторами
самолетов Ту-154
и
Ил-62. Буквенно-цифровой
код МПН,
например
МУС-ПТВ, расшифровывается следующим образом:
МУС —
меха-
низм управления стабилизатором;
3 —
момент пробуксовки фрикци-
онной муфты
(даН • м); П —
переменный
ток; ТВ —
тропическое
вы-
полнение.
В
МПН
привода шасси
в
третьей позиции кода стоит соответственно
буква
Ш,
привода закрылков
— 3 и т. д. МПН
состоит
из
двух
ЭД
(Ml
и М2),
ступеней планетарного редуктора, фрикционной муфты
ограничения момента
МФ,
ручного привода
РП.
Каждый
ЭД
имеет
муфты «сцепления—торможения»
(Y1 и Y2) для
сцепления валов
ЭД
с первой ступенью редуктора
при
подаче питания
в
обмотку
и
блоки-
рования первой ступени редуктора
на
корпус
при
снятии питания
соб-
233
мотки муфты. Ручной привод служит для проворачивания вручную
выходного вала при монтаже механизма на ВС и отладке в наземных
условиях концевых выключателей при отключенных ЭД. Двигатели
могут работать либо вместе, либо раздельно, независимо один от дру-
гого,
на общий выходной вал. В нормальном режиме работы обычно
работают оба ЭД. При этом их угловые скорости суммируются в диф-
ференциальном редукторе, и скорость выходного вала определяется
двумя составляющими: оз
1
и ю
2
, т. е. (о
с
=
а>
1
+ ю
2
. При этом МПН
на выходе развивает мощность Р
2
— М
с
(ш! + оэ
2
), где М
с
— момент
сопротивления при со = со
с
. Проследим кинематические цепи передачи
движения выходному валу от ЭД. Редуктор имеет две кинематические
цепи: цепь I: Ml — Y1 — 6 — 5 — 4 — 9 — / — 2 — МФ — вы-
ходная ступень; цепь II: М2 — Y2 — 6' — 5' — 4' — 7 — 8 — 3 —
/ — 2 — МФ — выходная ступень. При одновременной работе
двигателей Ml и М2 в согласованном направлении корона 3 получает
вращение через внутреннее зацепление от сателлитов /, связанных че-
рез солнечное колесо 9, водило 4, сателлиты 5 и колесо 6 с валом дви-
гателя Ml, и через внешнее зацепление от колес 8 и 7, водило 4', ко-
леса 5' и 6', связанные с валом двигателя М2. При отключении (от-
РП
ГУ
Л Д Д Л Л
'WW
Рис.
15.6. Кинематическая схема МУС-ЗПТВ
234
казе) одного из ЭД обеспечивается нормальная работа другого. При
этом угловая скорость выходного вала МПН примерно вдвое меньше,
чем при работе двух двигателей: и[ =
1/2со
с
^.
Выходная мощность
МПН также уменьшается примерно вдвое: Рг =
1/2со
с
М
с
=
1/2Р
2
.
Для обеспечения/нормальной работы второго канала муфта Y1(Y2)
отказавшего канала должна перейти в режим торможения (зафикси-
ровать вал первой ступени редуктора). В противном случае работо-
способный канал будет вращать вал отказавшего ЭД, а движущий мо-
мент на выходном валу будет отсутствовать, т. е. МПН будет нерабо-
тоспособным. Пусть, например, отказал двигатель Ml. При нормаль-
ном функционировании остальной части системы КЗД снимает пита-
ние с муфты Y1, которая переходит в режим торможения, фиксируя
колеса 6—5 — водило 4 — колесо 9. Движение от двигателя М2 бу-
дет передаваться по цепи: М2 — 5 — 6' — 5' — 4' — 7 — 8 — 3 (на-
ружное зацепление) — / — 2 — МФ —выходная ступень. Если же
муфта Y1 не затормозит колесо 6, то движение от двигателя М2 пе-
редается по цепи: М2 — Y2 — 6' — 5' — 4' — 7 — 8 — 3 — / —
9 — 4 — 5 — 6 — Y1 к валу отказавшего ЭД. В этом случае води-
ло 2 остается неподвижным, сателлиты, вращаясь на своих осях, свя-
занных с водилом 2, вращают колесо 9. Корона 3 обкатывается на са-
теллитах 1. Аналогичная ситуация возникает при отказе двигателя
М2.
Схемы включения муфт рассмотрены в § 1.2. Муфты непосредст-
венно влияют на работоспособность МПН. Так, попадание ложного
сигнала +27 В растормаживает вал ЭД, а вместе с ним и выходной вал
всего МПН. К аналогичному режиму приводит и включение муфты при
отсутствии напряжения на якоре ЭД. Эти особенности требуют при-
менения специальных методов расчета безотказности МПН (см. §
15.5).
15.4. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МПН
Получим MX МПН в форме, принятой для одиночных ЭД, т. е.
в виде зависимости угловой скорости ю
с
от момента М
с
на валу МПН,
считая; что MX ЭД заданы угловыми скоростями холостого хода<о
01
,
<м
02
и жесткостью р\ и 6
2
. Сформулируем предварительно правила по-
лучения MX, следующие из анализа кинематической схемы.
1.
Каждый из ЭД (Ml и М2) в кинематическом отношении неза-
висимо друг от друга работает на общую (следовательно, одинаковую)
нагрузку, создаваемую ИМ на валу, т. е. при любой скорости М
д1
—
=
М
д2
= М
д
=
Мс^-Ч-
1
,
где т] и i — к. п. д. и передаточное отно-
шение редуктора.
2. При любой нагрузке угловая скорость МПН равна сумме ско-
ростей каналов: со
с
=-со
г
+ со
2
.
Эти правила иллюстрируются схемой замещения МПН
(рис.
15.7, а). В качестве электрического аналога рассматривается схе-
ма включенных параллельно источников электропитания с напряже-
нием V
1
= U
2
= U (рис. 15.7, б). Электрическим аналогом моментов
235
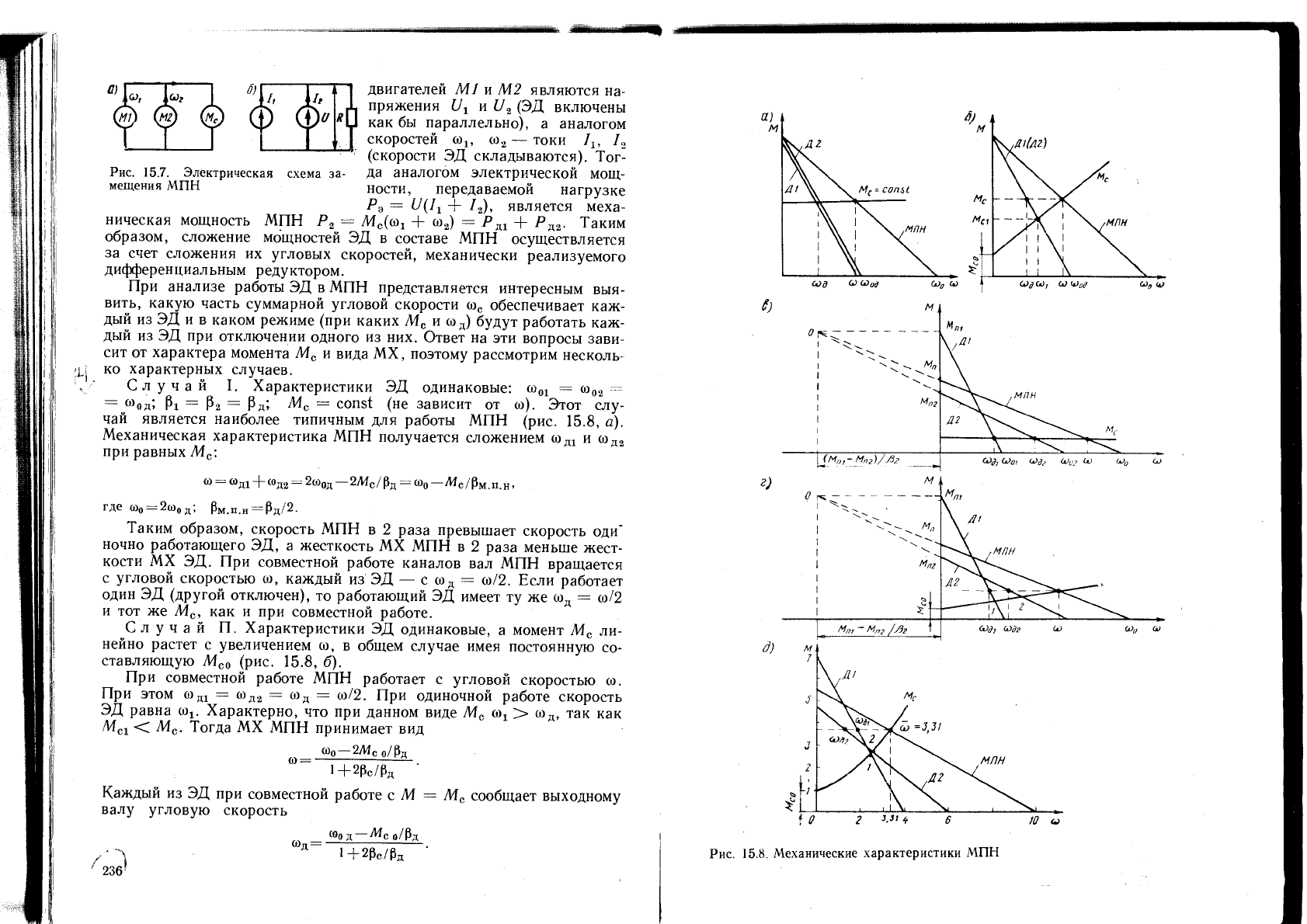
двигателей
Ml и М2
являются
на-
пряжения
1/
х
и (У
8
(ЭД
включены
как
бы
параллельно),
а
аналогом
скоростей
coj,
со
2
—
токи
1
г
, /
2
(скорости
ЭД
складываются).
Тог-
Рис.
15.7.
Электрическая схема
за- да
аналогом электрической
мощ-
мещения
МПН
ности, передаваемой нагрузке
Р
д
=
U(I
1
-\-
/
2
),
является меха-
ническая мощность
МПН Р
г
= М
с
(сй! + со
2
) = Р
д1
+ Р
д2
.
Таким
образом, сложение мощностей
ЭД в
составе
МПН
осуществляется
за счет сложения
их
угловых скоростей, механически реализуемого
дифференциальным редуктором.
При анализе работы
ЭД в
МПН представляется интересным выя-
вить,
какую часть суммарной угловой скорости
со
с
обеспечивает каж-
дый
из ЭД и в
каком режиме (при каких Л1
С
и со
д
)
будут работать каж-
дый
из ЭД при
отключении одного
из
них. Ответ
на эти
вопросы зави-
сит
от
характера момента
М
с
и
вида MX, поэтому рассмотрим несколь-
ко характерных случаев.
Случай
I.
Характеристики
ЭД
одинаковые:
о>
01
=
со
02
=
=
ю
од; Pi = Р
2
= Р
д
; М
с
— const (не
зависит
от со).
Этот слу-
чай является наиболее типичным
для
работы
МПН (рис. 15.8, а).
Механическая характеристика МПН получается сложением
со
Д1
и
со
Д2
при равных
М
с
:
ш
=
Юд1
+
<0д2
=
2
«>од
—
2М
с
/р
д
= ш
0
— М
с
/р
м
.п.н,
где
ш
0
=
2а)
0д
;
Р
м
.
п
.
н
== Рд/2.
Таким образом, скорость
МПН в 2
раза превышает скорость
оди"
ночно работающего
ЭД, а
жесткость MX
МПН в 2
раза меньше жест-
кости
MX ЭД. При
совместной работе каналов
вал МПН
вращается
с угловой скоростью
со,
каждый
из ЭД — с со
д
=
со/2. Если работает
один
ЭД
(другой отключен),
то
работающий
ЭД
имеет
ту же со
д
= со/2
и
тот же М
с
, как и при
совместной работе.
Случай
П.
Характеристики
ЭД
одинаковые,
а
момент
М
с
ли-
нейно растет
с
увеличением
со, в
общем случае имея постоянную
со-
ставляющую
М
с0
(рис. 15.8, б).
При совместной работе
МПН
работает
с
угловой скоростью
со.
При этом
со
д1
=
со
Д2
= со
д
= со/2. При
одиночной работе скорость
ЭД равна
со
х
.
Характерно,
что при
данном виде
М
с
co
t
> со
д
, так как
/И
с1
< М
с
.
Тогда MX
МПН
принимает
вид
^ ш
0
—2М
С0
/р
д
1+2р
с
/р
д
•
Каждый
из ЭД при
совместной работе
с М = М
с
сообщает выходному
валу угловую скорость
ш
_
сорд—Мсо/Рд
236
!
Рис.
15.8.
Механические характеристики
МПН
При одиночной работе
ЭД:
И1
=
<о
вд
-(Л1
с
.+р
с
ш
д
)/р
д
=
^г1^^.
>
+Рс/Рд
«>Д
1+Рс/Рд
>
'
С
л у ч а й
III.
ЭД с
разными MX (со
01
ф
со
02
;
В,
=/=
8
2
)
имеют на-
грузку
с
моментом
М, = const (рис. 15.8, в).
Этот режим реализует-
мггЗ"
1
с°
вместнои
Работе основного
и
дублирующего
ЭД в
составе
мин, оборудованного разными
ЭД. В
этом случае
ш
=
Шд1
+
Шд2
= со
л
+
со
02
—М
с
(1 /р,
-1 /р
2
) =
со
0
- А/
с
/
р\
где
СО
0
=Ш
01
+
Й)
02
;
р = р
1
Р
2
/(Р
1
+ р
2
).
Этот случай имеет следующие характерные особенности: двигатель
при
/И
с
> М
п2
переходит
в
тормозной режим (противовклю-
чения), Двигатель
Д1 при М
с
< М
т
работает
в
двигательном режиме
а точке
М = М
п
со
д1
=
—
со
Д2
,
угловая скорость МПН
со = 0,
при-
вод развивает пусковой момент
М
т
< М
п
< М
т
. ЭД
сообщают
на-
грузке угловые скорости
со
д1
и
со
Д2
(одинаковые
при
совместной
и
оди-
ночной работе).
Случай
IV. На ЭД с
характеристиками
со,.,
co
fi
„;
В. В.,
момент
М
с
-= М
с0
+ р> (рис. 15.8, г).
Характеристика
М о,) для
МПН аналогична
рис. 15.8, е. При
совместной работе
ЭД
сообщают
нагрузке скорости
со
д1
и
со
д2
.
При
одиночной работе
ЭД (при том же
характере нагрузки) работают соответственно
в
точках
/ и 2
Учиты-
вая зависимость М(со), полученную
для
случая III,
и
зависимость
M
e
(to)I
для
случая II, после упрощений получаем уравнение
для слу-
„
_
м
оР—
м
еч
=
ю
0
—УИ
С0
/р
IW
Р
+
Рс
1
+
Рс/Р
'
Случай
V. ЭДс
MX, аналогичными случаю
IV,
работают
на «вентиляторную» нагрузку вида
М
с
= М
с0
+
p
c
(
ai
+
со
2
)
2
(рис.
15.8 в).
Механическая характеристика принимает
вид со =
Г-
ев /т
с
1
=
в ?° Р
i
Mc0
+ где
=
ш
« +
ш
«:
н — Р1Р2/Ф1
-г Р
2
;-
Рабочая точка (значение
со
совместной работы)
определяется уравнением
со
2
+
сор7В
с
+ (М
с0
—
со„В)/в
с
= 0 Его
решение дает
со
=
-р/2р
с
+
У(Р/2р
с
)-«+(<о
0
р_Л1
св
)/р
0
.
Так,
для
рис._15.8,
д,
построенного
в
относительных единицах,
при
Рс
= 0,25; М
с0
=1;
щ
= Ю; р = 0,56 ^Г= -0,56/0,5 +
+
У
(0,56/0,5)*
+ (10- 0,56 - 1)/0,25 = 3,31, что
хорошо совпадает
с графическим решением. Угловые скорости
ЭД при
совместной работе
обозначены
со
д1
и
со
д2>
при
одиночной
—
точками
/ и 2
(аналогично
рис.
15.8, г).
v
238
15.5. МЕТОДЫ РАСЧЕТА
И
СПОСОБЫ ПОВЫШЕНИЯ ЭКСПЛУАТАЦИОННОЙ
НАДЕЖНОСТИ СИСТЕМ ЭЛЕКТРОПРИВОДА
Надежность
—
свойство объекта сохранять
во
времени
в
установ-
ленных пределах значения всех параметров, характеризующих спо-
собность выполнять требуемые функции
в
заданных режимах
и^
усло-
виях применения,
—
характеризуется рядом таких показателей,
как
безотказность, ремонтопригодность, долговечность, сохраняемость
и
т.
д.
Одним
из
количественных показателей безотказности является
вероятность безотказной работы (ВБР)
P(t). Из
анализа кинематичес-
кой схемы МПН следует,
что ЭД в его
составе работают
в
режиме
на-
груженного резерва,
т. е. при
отказе
или
выключении одного
из них
при определенных условиях нормально работает другой. Наиболее
простым методом расчета
ВБР
является метод структурных схем,
но
его применение ограничено определенными условиями. Считают,
что
все элементы системы подвержены одному типу отказов. Если хотя
бы
один подвержен двум
или
более отказам,
то
метод неприемлем. Сис-
тема представляется структурной схемой, состоящей
из
последователь-
но-параллельных соединений звеньев. События, изображенные
как
звенья схемы, должны быть независимы.
В
структурной схеме не долж-
но быть событий, отрицающих друг друга. Одно
и то же
событие пред-
ставляется одним звеном,
т. е.
соблюдается условие ординарности.
Если
ЭД с
муфтой сцепления-торможения
(МСТ)
рассматривать
как
звено, удовлетворяющее этим условиям,
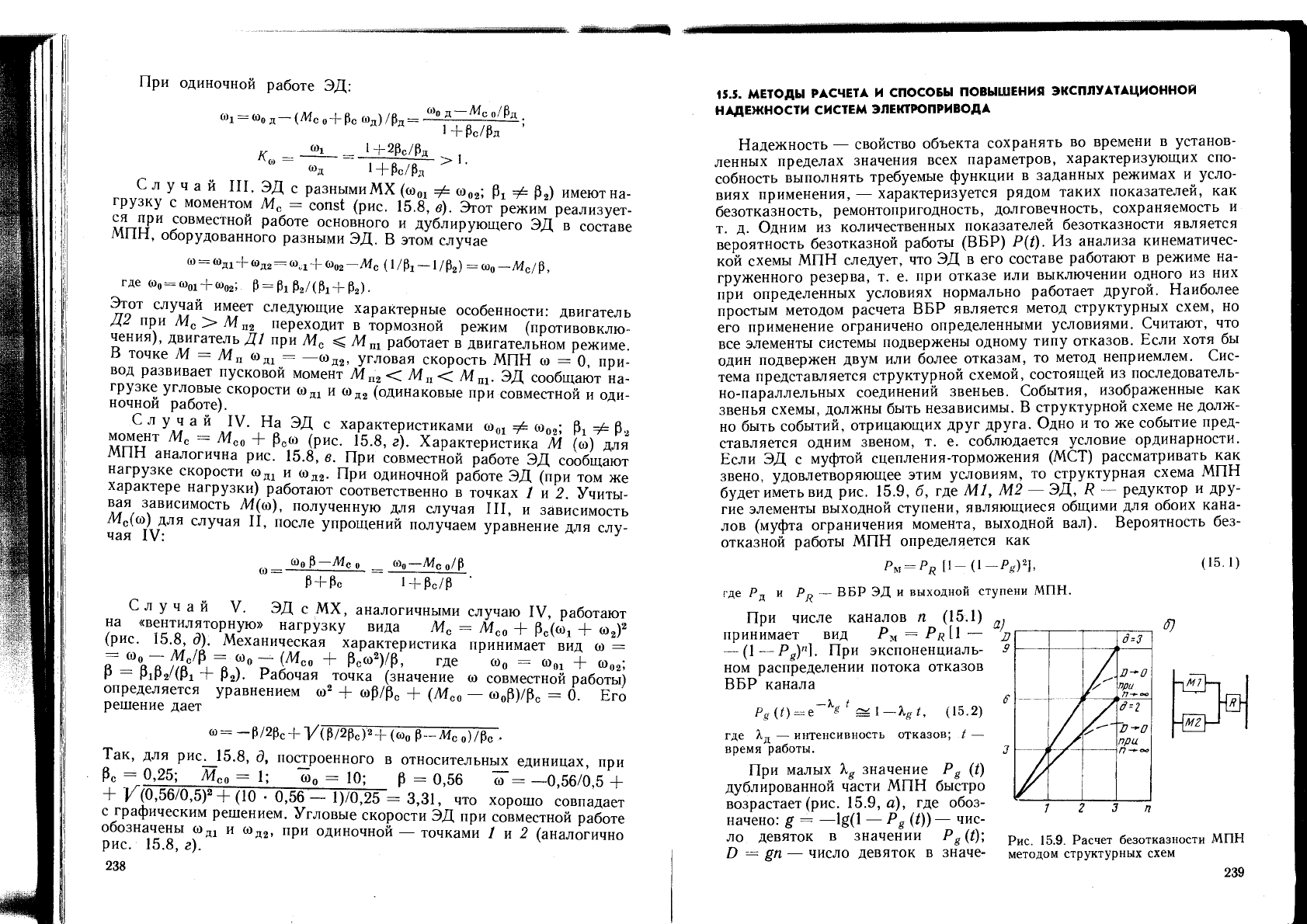
то
структурная схема
МПН
будет иметь вид рис.
15.9, б, где Ml, М2 —
ЭД,
R —
редуктор
и
дру-
гие элементы выходной ступени, являющиеся общими
для
обоих кана-
лов (муфта ограничения момента, выходной
вал).
Вероятность без-
отказной работы
МПН
определяется
как
Ри
—
Рц
где
Р
д
и
При
числе
(1-Я*)*],
ВБР
ЭД и
выходной ступени
МПН.
каналов
п
(15.1)
(15.1)
принимает
вид Р
М
= Р«[1
— (1 — P
g
)"l.
При
экспоненциаль-
ном распределении потока отказов
ВБР канала
а)
P
g
(0 = е
-V
%
я
—
интенсивность отказов;
(15.2)
/
—
где
время работы.
При малых
X
g
значение
P
g
(t)
дублированной части
МПН
быстро
возрастает (рис.
15.9, а), где
обоз-
начено:
g =
—
lg(l
— P
g
(t)) —
чис-
ло девяток
в
значении
P
g
(t);
D
-—
gn —
число девяток
в
значе-
д--3
//
при
С'
при
П — ~
при
П — ~
6)
-]мТ\-
1
-\MZ\-
Рис.
15.9.
Расчет безотказности
МПН
методом структурных схем
239