Растригин Л.А. Адаптация сложных систем
Подождите немного. Документ загружается.

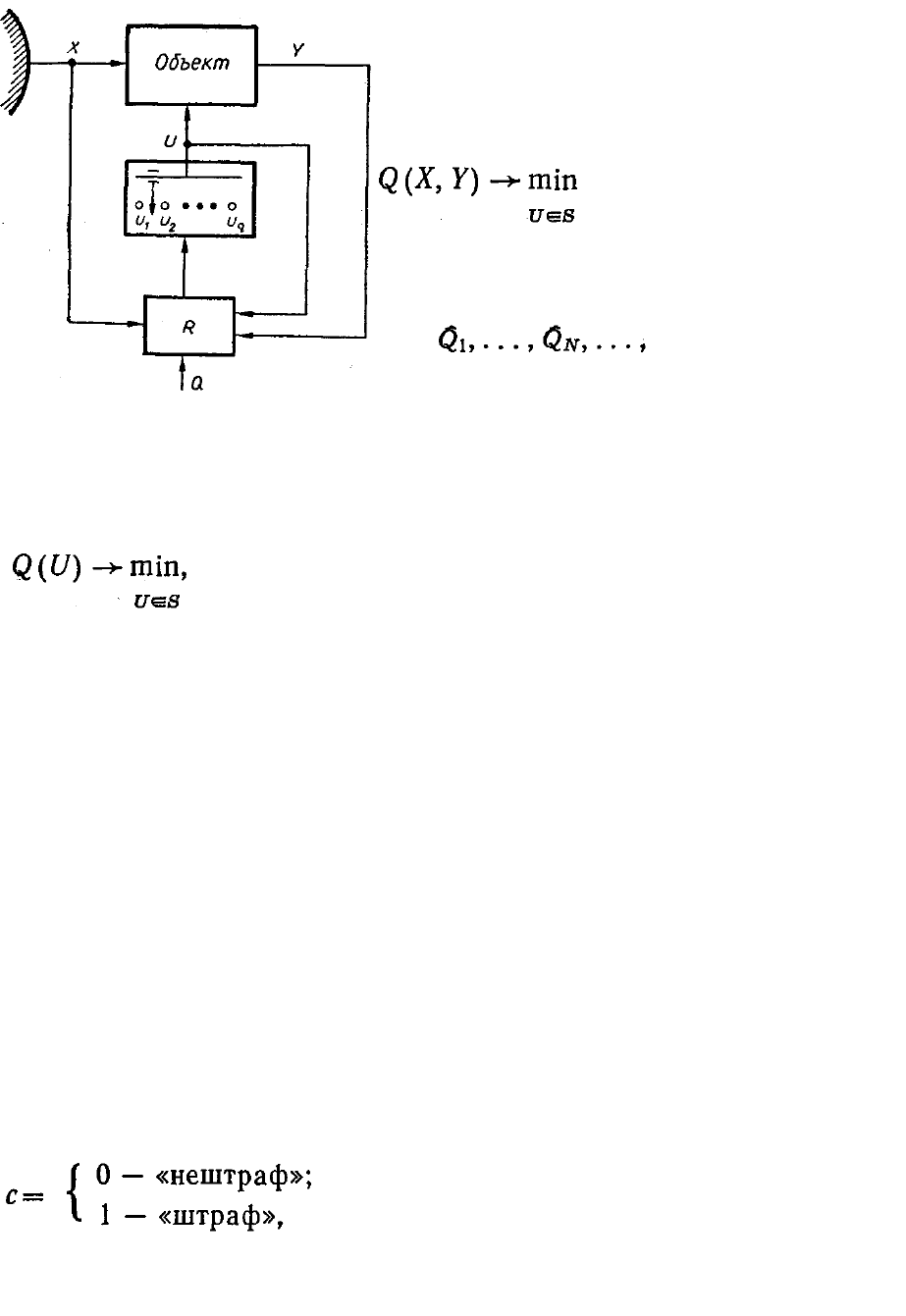
натива, которая минимизирует заданный
критерий качества Q объекта в
сложившейся ситуации.
Решающее правило R (5.1.1) должно
решать задачу альтернативной адаптации
по локальным наблюдениям оценок
критерия
(5.1.3)
причем состояние
Y объекта, как обычно, зависит от
управления U неизвестным образом. Это обстоятельство позволяет
записать задачу (5.1.2) в форме
(5.1.4)
где зависимость Q(U) неизвестна.
Ввиду конечности числа альтернатив для синтеза алгоритма
адаптации R естественно обратиться к конечным автоматам, алфавит
выхода которых состоит из альтернативных управлений S. Здесь
эффективно могут быть использованы автоматы с целесообразным
поведением [134] и стохастические автоматы с переменной
структурой [46]. Рассмотрим их применение для альтернативной
адаптации.
5.1.2. Алгоритмы-автоматы
Прежде всего введем понятие штрафа с, используемое в теории
обучения автоматов. Будем считать, что входом автомата является
сигнал, характеризующий эффективность его функционирования в
данный момент времени. Этот сигнал имеет двоичный характер:
(5.1.5)
где c=0 соответствует позитивной реакции
среды (объекта), а с=1 — негативной.
Р
ис. 5.1.1. Блок-схема альтер-
нативной а
д
апта
ц
ии.
Естественно связать этот штраф с изменением минимизирумого
критерия Q функционирования объекта. Это можно сделать
следующим образом:
(5.1.6)
где
(5.1.7)
a U'
N
— управление, реализованное в
объекте на N-м шаге
Так как оценка приращения критерия (5.1.7) происходит в
обстановке значительной неопределенности о состоянии среды и
оператора объекта, влияющих на эту оценку, то удобно вос-
пользоваться рекуррентным сглаживанием:
(5.1.8),
где 0<k<1 — коэффициент сглаживания.
В этом случае оценка (5.1.7) принимает вид
(5.1.9)
Теперь рассмотрим автомат с целесообразным поведением. Будем
называть его поведение целесообразным, если средний штраф при
функционировании автомата меньше половины, т. е.
(5.1.10)
Иначе говоря, автомат за свои действия штрафуется (с=1)
реже, чем поощряется (с=0), что, очевидно, и характеризует
целесообразность его поведения. В терминах адаптации (5.1.10)
означает, что оценка приращения критерия качества чаще от-
рицательна, чем положительна.
Заметим, что это определение целесообразности не более чем
эвристика и можно легко представить ситуацию, когда при
выполнении условия (5.1.10) поведение будет нецелесообразным —
например, когда положительные приращения критерия (5.1.7) по
модулю значительно больше отрицательных. Именно такая ситуация
имеет место в окрестности экстремума критерия, что обычно
затрудняет реализацию точной адаптации и требует введения
специальных мер типа увеличения объема накопления и т. д. Однако в
большинстве случаев эвристика (5.1.10) работает вполне эффективно,
чем мы и воспользуемся.
Рассмотрим алгоритм адаптации как автомат, т. е. пятерку вида
A = ‹ C, W, S, µ, υ ›. (5.1.11)
Здесь С — алфавит входов (это двоичный сигнал штрафа c (5.1.5)); S
— алфавит выходов автомата, который образуется заданными
альтернативами; W — множество состояний автомата:
W = {w
1
, ..., w
m
}; (5.1.12)
µ — функция переходов от одного состояния к другому:
w' = µ (w, с), (5.1.13)
где w' — новое состояние, в которое переходит автомат из состояния w
при входе с; υ - функция выходов, определяющая выход автомата по
его состоянию w и входу с:
(5.1.14)
Таким образом, для определения автоматного
алгоритма адаптации объекта необходимо знать:
1) множество состояний (5.1.12);
2) функцию переходов (5.1.13);
3) функцию выходов (5.1.14).
Разные способы задания этих факторов и отличают различные
автоматные алгоритмы адаптации. Рассмотрим два из них.
5.1.2.1. Автоматы с целесообразным поведением
Из всех многочисленных автоматов с целесообразным поведением
[46, 134] наибольший интерес для альтернативной адаптации
представляют, так называемые автоматы с линейной тактикой. Они
отличаются тем, что действие, приведшее к положительному
результату (нештрафу, с=0), закрепляется автоматом и повторяется, а
действие, приведшее к отрицательному результату (штрафу, с=1),
автомат «стремится» сменить на другое. Так обычно поступают живые
существа. В этом и состоит линейность тактики.
Введем l — параметр глубины памяти автомата. Каждое из q
действий автомата (альтернативных решений) имеет l состояний
памяти. Тогда число состояний автомата (5.1.12) m=ql.
Функцию переходов автомата с линейной тактикой удобно
представить в виде двух графов переходов (рис. 5.1.2) для двух
состояний входа автомата. Функция выхода этого автомата образуется
так, что на различных «усах» графа переходов (ем.
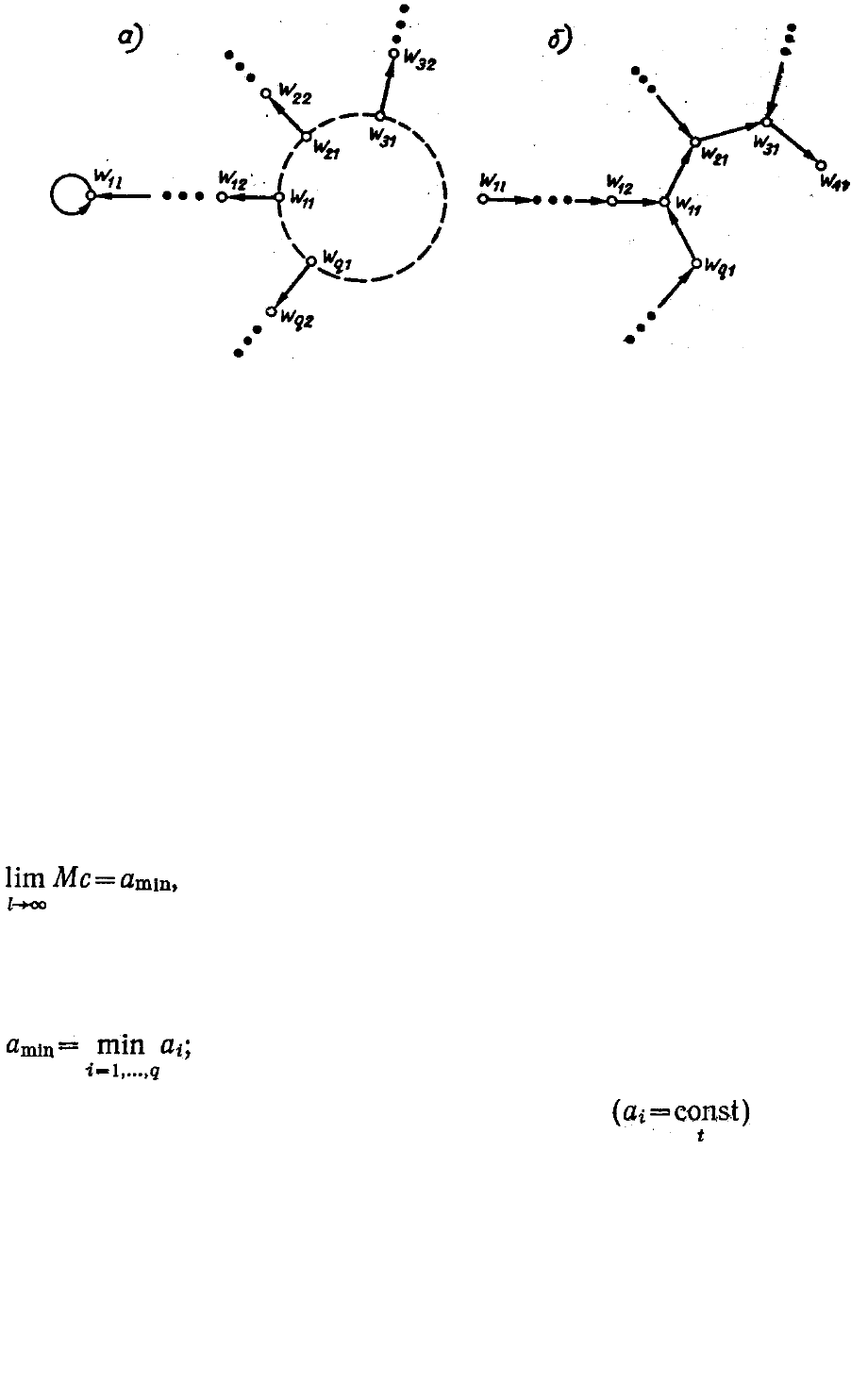
Рис. 5.1.2. Графы переходов состояний автомата с линейной тактикой:
а — при с=0, б — при с=1.
рис. 5.1.2) производятся различные действия, т. е. действие U
i
производится при w = w
ij
.
Таким образом, w
ij
является состоянием автомата, в koтором он
производит i-e действие U
i
.
Легко видеть, что при нештрафе (с=0) последнее действие
повторяется и закрепляется, а при штрафе (с=1) внутреннее состояние
автомата изменяется так, чтобы быстрее сменить это действие на
другое. Доказано [46, 134], что в стационарной среде, т. е. при
неизменных вероятностях штрафа за каждое действие, этот автомат
асимптотически оптимален:
(5.1.15
)
где М — знак математического ожидания; a
min
— минимальная
вероятность штрафа:
(5.1.16)
a
i
— вероятность штрафа за i-e действие автомата
Асимптотическая оптимальность означает, что в стационарной
среде при увеличении объема памяти l автомат всегда будет совершать
наилучшее действие, минимизирующее его штраф.
Очевидно, что в нестационарной среде нельзя объем памяти
l делать слишком большим, так как при этом затрудняется
перестройка с одного действия автомата на другое. Чем более
нестационарна среда, тем меньше должен быть параметр па
мяти l.

Таким образом, при использовании автомата с линейной тактикой
для целей альтернативной адаптации эффективность
процесса определяется одним параметром, оптимальный выбор
которого обычно представляет некоторую трудность.
Рассмотренный автомат является детерминированным. Далее
перейдем к стохастическим автоматам.
5.1.2.2. Стохастические автоматы с переменной структурой
Простейшим стохастическим автоматом с переменной структурой
является «автомат-строка», реализующий независимый выбор
альтернатив с вероятностями
P
N
= (p
1
N
, ..., p
q
N
), (5.1.17)
где
Процесс изменения структуры (обучения) такого автомата
заключается в изменении вероятностей Р на каждом шаге таким
образом, чтобы вероятность альтернативы при нештрафе
увеличивалась, а при штрафе — уменьшалась с учетом нормирования
вероятностей:
p
i
N
= p
i
N-1
+ ∆p
i
N
(i = l, ..., q), (5.1.18)
где
при U'
N
= U
i
;
при U'
N
= U
j
, (j≠i), (5.1.19)
причем
f(•)>0; φ(•,•)<0 при с = 0;
f(•)<0; φ(•,•)>0 при с = 1. (5.1.20)
На функции f и φ накладываются очевидные ограничения:
0 ≤ z + f(z) ≤ 1;
0 ≤ z + φ(z, w) ≤ 1; (5.1.21)
для любого 0 ≤ z ≤ 1 и при 0 ≤ z
i
≤ 1. Этим условиям
удовлетворяют, например, такие функции:

(5.1.22)
и
(5.1.23)
(5.1.24)
5.1.2.3. Алгоритм «многорукого
бандита»
Известная задача о «двуруком бандите» [256, 263]* может быть
интерпретирована как задача о двуальтернативной адаптации. Для
простоты рассмотрим сначала этот случай (q = 2).
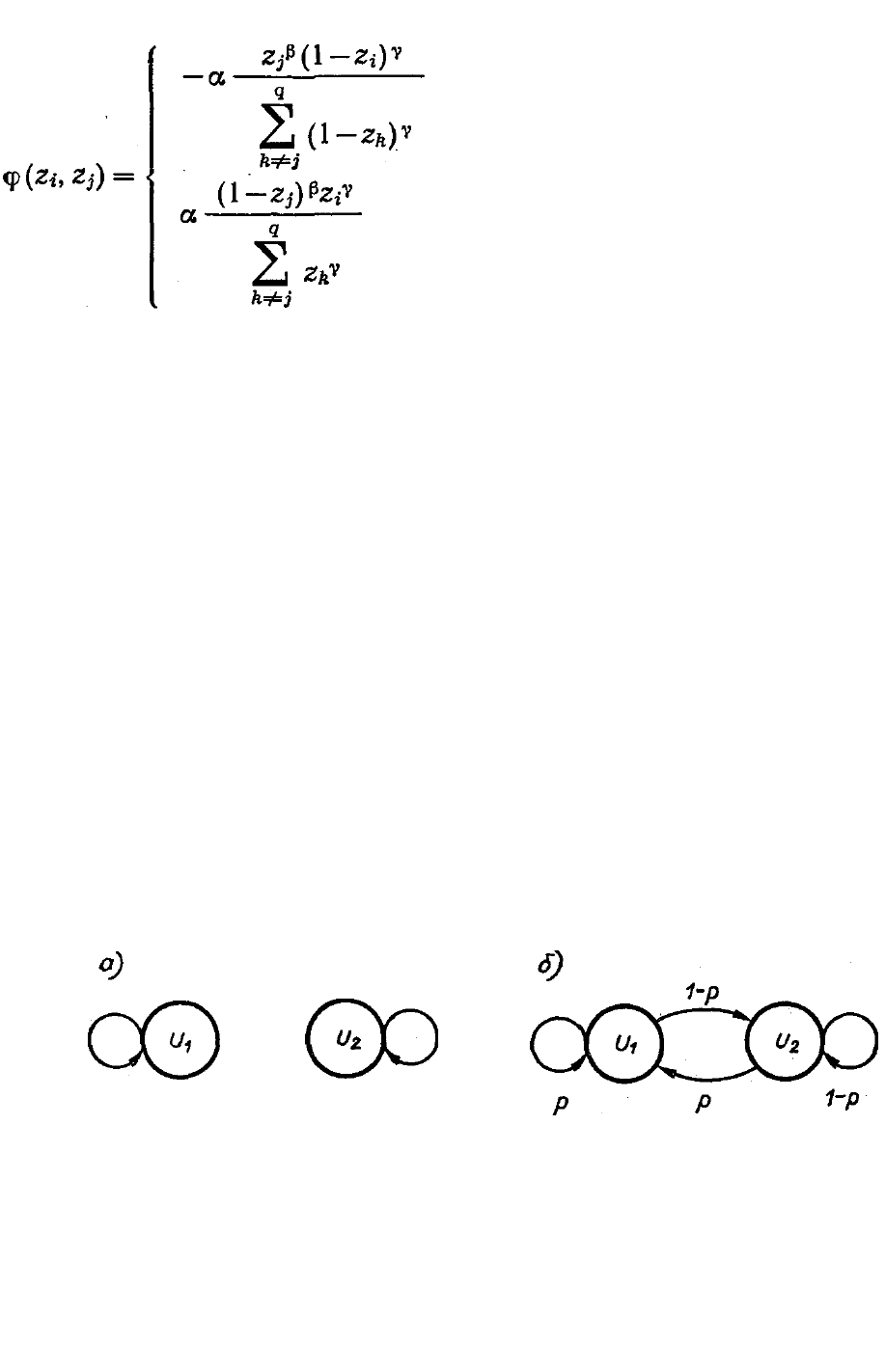
Будем сочетать две тактики поведения, рассмотренные выше. При
с = 0 сохраним удачную альтернативу, т. е. будем действовать в
соответствии с линейной тактикой (рис. 5.1.3, а), а при с = 1 сохраним
первую альтернативу с вероятностью р, а вторую — с вероятностью
1—р и перейдем к другой альтернативе с дополняющими
вероятностями (рис. 5.1.3, б).
Рис. 5.1.3. Граф алгоритма двуальтернативного выбора: а — при с=0, б
— при с=1.
* «Одноруким бандитом» американцы называют игральный автомат, при-
водимый в действие одной рукояткой («рукой»). Задача о «двуруком бандите»
возникает при двух рукоятках, если априори известно, что вероятность выигрыша
при запуске автомата какой-то одной «рукой» больше, чем другой. Задача состоит
в том, чтобы, манипулируя обеими рукоятками, найти ту, которая обеспечивает
наибольший выигрыш, и при этом свести к минимуму про-
при с=0;
при c=l,
где всего имеется три параметра:
0<α<1; β,γ>0.
В простейшем случае β = γ = 1.
Задача заключается в определении и изменении вероятности р в
процессе адаптации. Очевидно, что при U
1
U
2
вероятность р должна
возрастать, а при U
1
U
2
— уменьшаться.
Для оценки р введем функцию риска [250—253]. В общем случае
ее логично записать в виде
(5.1.25)
Здесь p*
i
— вероятность того, что i-я
альтернатива является наилучшей, т. е.
p*
i
= Вер [U
i
= U*] (i = l, ..., q) (5.1.26)
где U* — оптимальная альтернатива; р
i
— вероятность использования
i-й альтернативы алгоритмом адаптации, а υ
i
— ущерб, испытываемый
при использовании; i-й альтернативы, если она неоптимальна.
Задача синтеза оптимальной стратегии поведения сводится к
решению задачи минимизации
(5.1.27)
где S: Отсюда вытекает, что при υ
i
≠0 оптимальная
стратегия имеет вид (5.1.26), т. е.
P* = (p*
1
, ..., p*
q
). (5.1.28)
Таким образом, оптимальной является рандомизированная
стратегия, которая получается путем оценивания вероятностей
(5.1.26). Проведем оценивание для q = 2.
Естественно предположить, что
(5.1.29)
где Q
1
и Q
2
— средние значения показателя
качества для каждой альтернативы соответственно, а ε(σ) —
реализация независимых случайных величин с нулевым
математическим ожиданием и дисперсией а, априори неизвестной.
Будем считать, что распределение этих случайных величин
нормальное. Тогда вероятность того, что альтернатива U
1
лучше U
2
:
(5.1.30)
где Φ — функция Лапласа, а «крышечкой» обозначены оценки,
которые определяются рекуррентно на каждом шаге адаптации:
(5.1.31)
Оценки
дисперсий:
(5.1.32)
(5.1.33)
при U'
N+1
= U
1
;
(5.1.34) если U'
N+1
= U
2
.
Здесь параметр
сглаживания µ
выбирается исходя из сведений об уровне нестационарности объекта
адаптации. Если объект стационарен, то оптимальное значение
параметра µ
*
= = (N — 1) / N, В нестационарном случае µ
*
= const и
значение его тем больше, чем больше нестационарность.
Легко видеть, что в стационарном случае
(5.1.35)
При этом р→1 при Q
1
<Q
2
и р→0 при Q
1
>Q
2
, т. е. в пределе
выбирается оптимальная альтернатива.
В многоальтернативном случае при c = 0 реализуется линейная
тактика, т. е. матрица переходов единичная:
(5.1.36)
При штрафе с = 1 стохастическая матрица
переходов
P
1
= || р
ij
||
q×q
, (5.1,37)
имеет элементы диагональные:
p
ii
= p
*
i
(5.1.38)
из (4.1.26) и недиагональные:
p
ij
= υ
i
Bep ( U
j
U
i
) (i ≠ j = 1, ..., q), (5.1.39)