Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств
Подождите немного. Документ загружается.

184
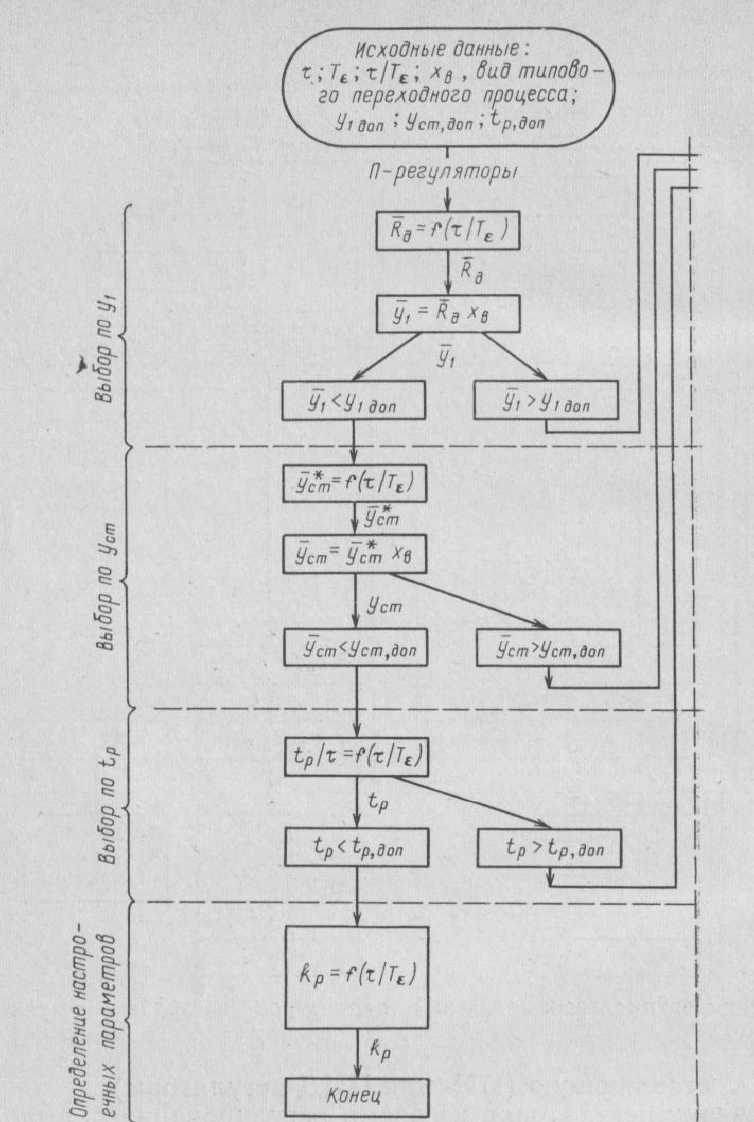
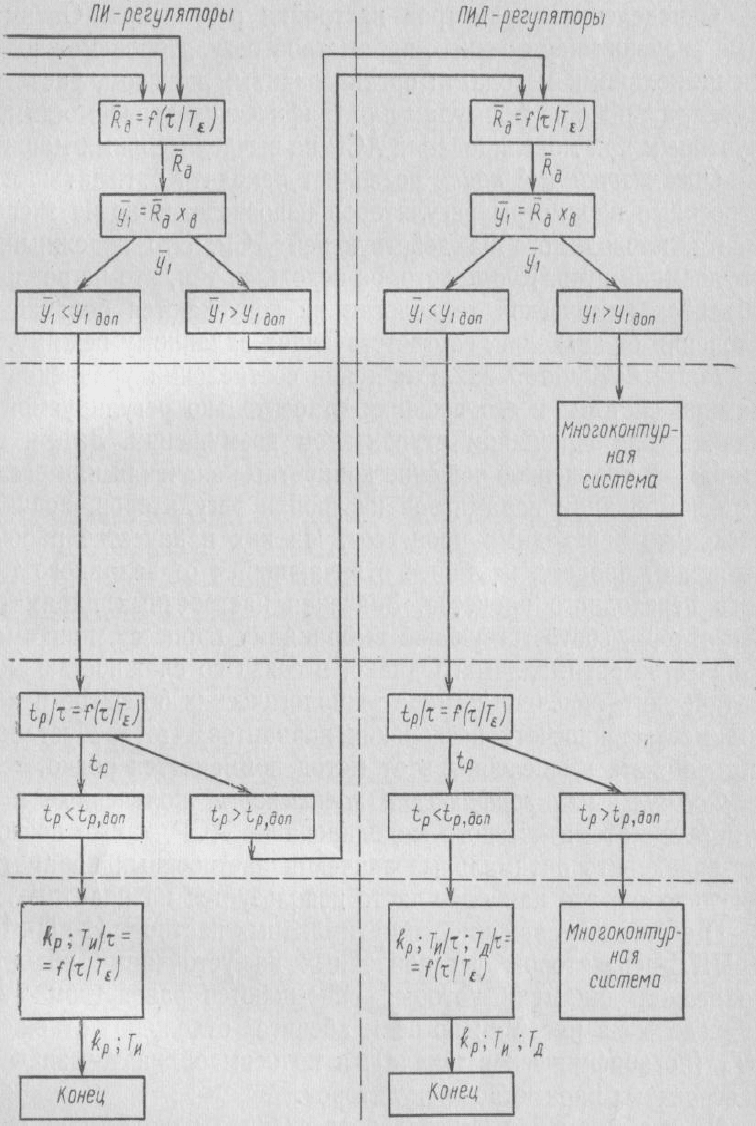
Рис. V-5. Схема последовательности выбора закона регулирования и определения опти-
мальных значений параметров настройки регулятора на нейтральных объектах.
Обычно И-регуляторы применяют на объектах, имеющих значительное са-
мовыравнивание и малое время запаздывания. Для регулирования технологических
величин на нейтральных объектах И-регуляторы не применяют, так как такие си-
стемы неустойчивы при любых значениях настроечных параметров. П-регуляторы
обладают быстродействием и работоспособны на инерционных объектах, но могут
быть использованы лишь тогда, когда при изменении нагрузки объекта допустимо
остаточное отклонение параметра от заданного значения. ПИ-регуляторы
185
имеют достаточное быстродействие, кроме того, способны выводить параметр на
заданное значение, поэтому их применяют чаще других. Если объекты характери-
зуются большим запаздыванием и претерпевают значительные изменения нагруз-
ки, П- и ПИ-регуляторы могут не справиться с обеспечением требуемого качества
регулирования; в таких случаях используют ПИД-регуляторы. Если ни один из
рассмотренных законов регулирования не позволяет получить переходный процесс
регулируемой величины, который не выходил бы за пределы заданных пока-
186
зателей качества, то для регулирования рассматриваемой величины вместо одно-
контурной используют многоконтурную систему регулирования.
Определение параметров настройки регулятора. Оптимальные значения
настроечных параметров регуляторов можно найти несколькими методами: орга-
низованным поиском, расчетным путем, а также по формулам или графическим за-
висимостям, полученным при моделировании АСР на вычислительных машинах.
Организованный поиск позволяет находить оптимальные настроечные пара-
метры регуляторов непосредственно из эксперимента, проводимого на действую-
щей АСР. Это надежный, но трудоемкий путь. Кроме того, он осложнен тем, что на
реальных объектах химической технологии не допускаются большие отклонения
от значений, соответствующих заданному режиму.
Расчетный метод заключается в составлении уравнения динамики системы
и его решении относительно регулируемой величины при единичном ступенчатом
возмущении. Затем, подставляя в полученное решение конкретные значения или
различные комбинации параметров настройки регуляторов, получают несколько
переходных процессов. Из них в качестве рабочего выбирают процесс, наименее
отличающийся от заданного типового переходного процесса. Значения настроеч-
ных параметров регулятора, соответствующие выбранному процессу, принимают в
качестве оптимальных. Однако, в связи со сложностью математического описания
химико-технологических объектов и необходимостью просчета нескольких вари-
антов, что требует большого объема вычислений, этот метод применяется редко.
Формулы или графические зависимости, полученные в результате матема-
тического моделирования АСР, также позволяют определить оптимальные значе-
ния настроечных параметров регуляторов; это наиболее часто используется на
практике.
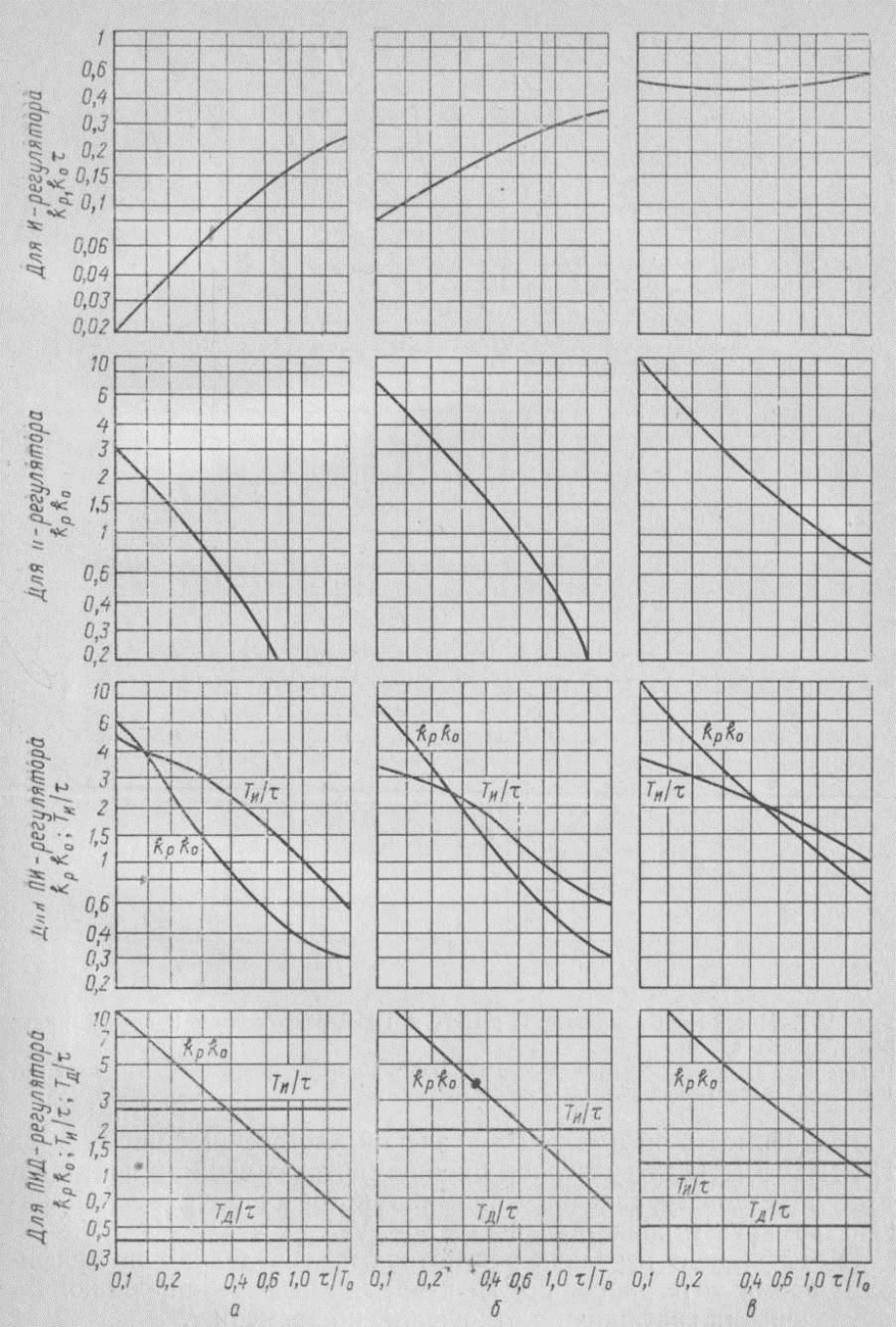
Графические зависимости оптимальных настроек И-, П-, ПИ- и ПИД-
регуляторов, установленных на устойчивых объектах, уравнения динамики кото-
рых описываются равенством (V,I), приведены па рис. V-6; по осям абсцисс отло-
жено отношение τ/T
0
(логарифмическая шкала), а по осям ординат — значения
настроечных параметров регуляторов.
По графикам для И-регулятора сначала находят произведение величин, от-
ложенное по оси ординат, а по нему вычисляют значение величины k
р1
— условно-
го коэффициента передачи И-регулятора; k
р1
характеризует скорость перемещения
плунжера исполнительного устройства системы регулирования при постоянном
значении отклонения текущего значения регулируемой величины от заданного.
Для П-, ПИ- и ПИД-регуляторов по значению коэффициента передачи системы ре-
гулирования k
с
= = k
0
k
p
при известном значении k
0
находят коэффициент передачи
регулятора k
р
. Значения времени интегрирования T
и
и времени дифференцирова-
ния Т
д
на графиках приведены по отношению к времени запаздывания объекта τ.
187
Рис. V-6. Настроечные кривые И-, П-, ПИ-, и ПИД-регуляторов в случае устойчивого объекта:
188
Переходный процесс: а — апериодический; б —с 20%-ным перерегулированием; в — с ми-
нимальной квадратичной площадью отклонения.
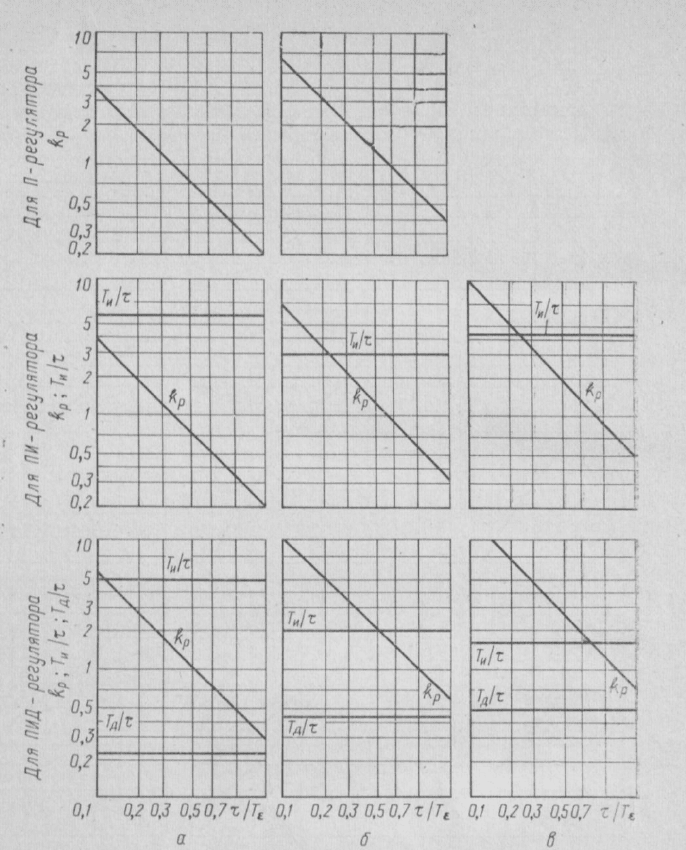
Рис. V-7. Настроечные кривые П-, ПИ- и ПИД-регуляторов в случае нейтральных объек-
тов:
Переходный процесс: А — апериодический; б —с 20%-ным перерегулиро-
ванием; в —с минимальной квадратичной площадью отклонения.
Зависимость оптимальных значений настроечных параметров П-, ПИ- и
ПИД-регуляторов от динамических свойств нейтральных объектов, уравнения ди-
намики которых описываются равенством (V,2), представлены на рис. V-7.
Коэффициент передачи регулятора k
p
определяют по графикам; время инте-
грирования Т
и
и время дифференцирования Т
д
приведены на графиках по отноше-
нию ко времени τ.
Пример V-1. Выбрать тип и определить оптимальные настроечные пара-
метры регулятора, установленного на устойчивом объекте 1-го порядка с за-
паздыванием при следующих условиях:
параметры объекта: коэффициент передачи k
0
=1,2; постоянная времени
T
o
=204 с; время запаздывания τ = 54 с; отношение τ/T
о
= 0,27;
189
система регулирования должна обеспечить переходный процесс с 20%-ным
перерегулированием;
параметры качества переходного процесса не должны превышать следую-
щих допустимых значений: динамическая ошибка регулирования y
1
доп
= 0,08, ста-
тическая ошибка регулирования у
ст
,
доп
= 0,03, время регулирования t
p,доп
= 600 с;
регулирующее воздействие, соответствующее максимальному изменению
возмущения, x
в
= 0,12.
Найдем максимальное отклонение регулируемой величины
По графикам (см. рис. V-2) определим динамический коэффициент пе-
редачи #A = #I/#O систем с регуляторами различных типов:
И-регулятор . . . .0,64 ПИ-регулятор . . .0,32
П-регулятор . . . ,0,36 ПИД-регулятор . . .0,24
По формуле (V.4) найдем величины y
1
для этих систем:
И-регулятор .... 0,0922 ПИ-регулятор . . , 0,0461
П-регулятор , , . .0,0518 ПИД-регулятор . , . 0,034
Таким образом, в системе с И - регулятором y
1
> у
ст
,
доп
и И - регулятор не
может быть применен.
Проверим систему с П - регулятором на величину у
ст
. Для этого по графику
(см. рис. V-2) найдем величину у*
ст
для процесса с 20%-ным перерегулированием
и вычислим уст по формуле (V,9)
Следовательно, в системе с П-регулятором y
ст
> у
ст
,
доп
и заданное качество
регулирования не будет обеспечено.
Проверим системы с ПИ- и ПИД-регуляторами на время регулирования t
p
определяемое по графикам (см. рис. V-2). Для системы с ПИ-регулятором имеем
t
p
= 12 τ= 12
.
54 = 648 с; в случае ПИД-регулятора t
р
= 8т = 8
.
54 = 432 с. Таким обра-
зом, только для системы с ПИД-регулятором справедливо неравенство t
р
< t
р
,
доп
.
Следовательно, для обеспечения заданных параметров качества регулирования
необходимо выбрать ПИД - регулятор.
Оптимальные значения параметров настройки ПИД - регулятора определим
по зависимостям, приведенным на рис. V-6:
С помощью АВМ (электронных аналоговых вычислительных машин) также
можно исследовать АСР и определять параметры настройки регуляторов.
АВМ олень эффективны как инструмент оценки качества процесса регули-
рования систем известной структуры при разных технологических режимах работы
объекта и различных комбинациях параметров настройки регулятора.
Простота изменения значений параметров регулятора, а в, случае необхо-
димости и отдельных параметров объекта, и возможность проведения эксперимен-
та на моделях не в натуральном, а в машинном масштабе времени позволяет значи-
190
тельно сократить затраты времени на проведение каждого эксперимента и прове-
рить большое число вариантов исследуемой задачи. Если
исследуемая АСР не удовлетворяет требованиям технологического процесса по
показателям качества регулирования, то обращаются к модели, поскольку на ней
можно легко менять структуру АСР; после испытания нескольких вариантов выби-
рают наиболее подходящий из них.
Исходным материалом для моделирования АСР является математическое
описание входящих в нее элементов или звеньев. Оно может быть получено либо
путем составления их уравнений динамики, либо из переходных (временных) или
частотных характеристик, полученных экспериментально.
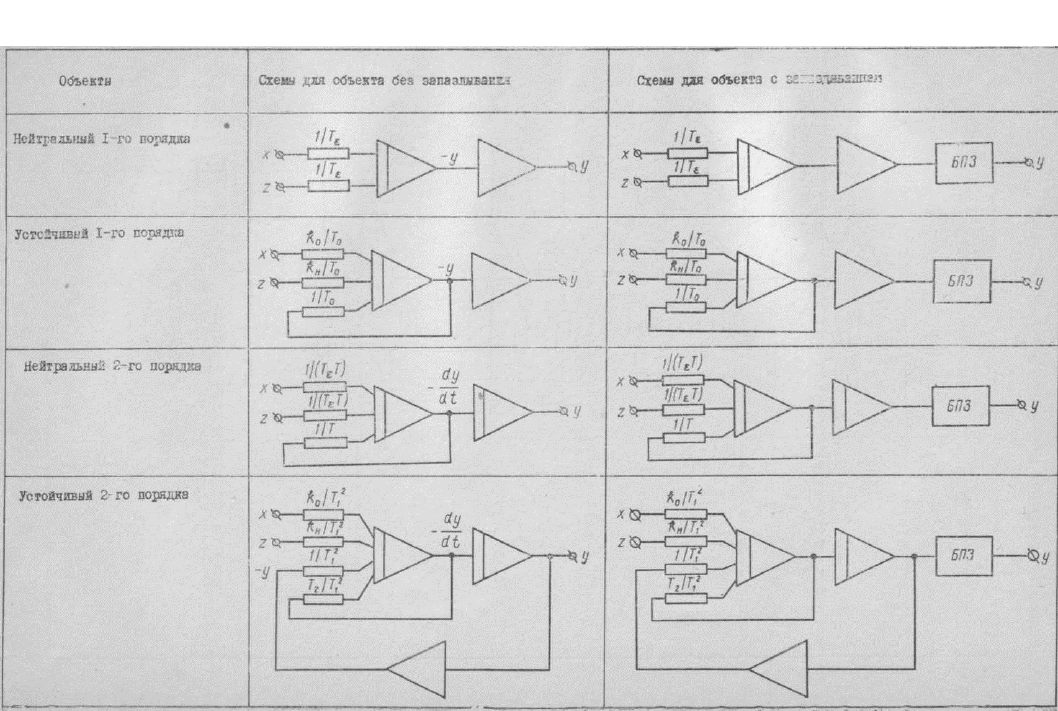
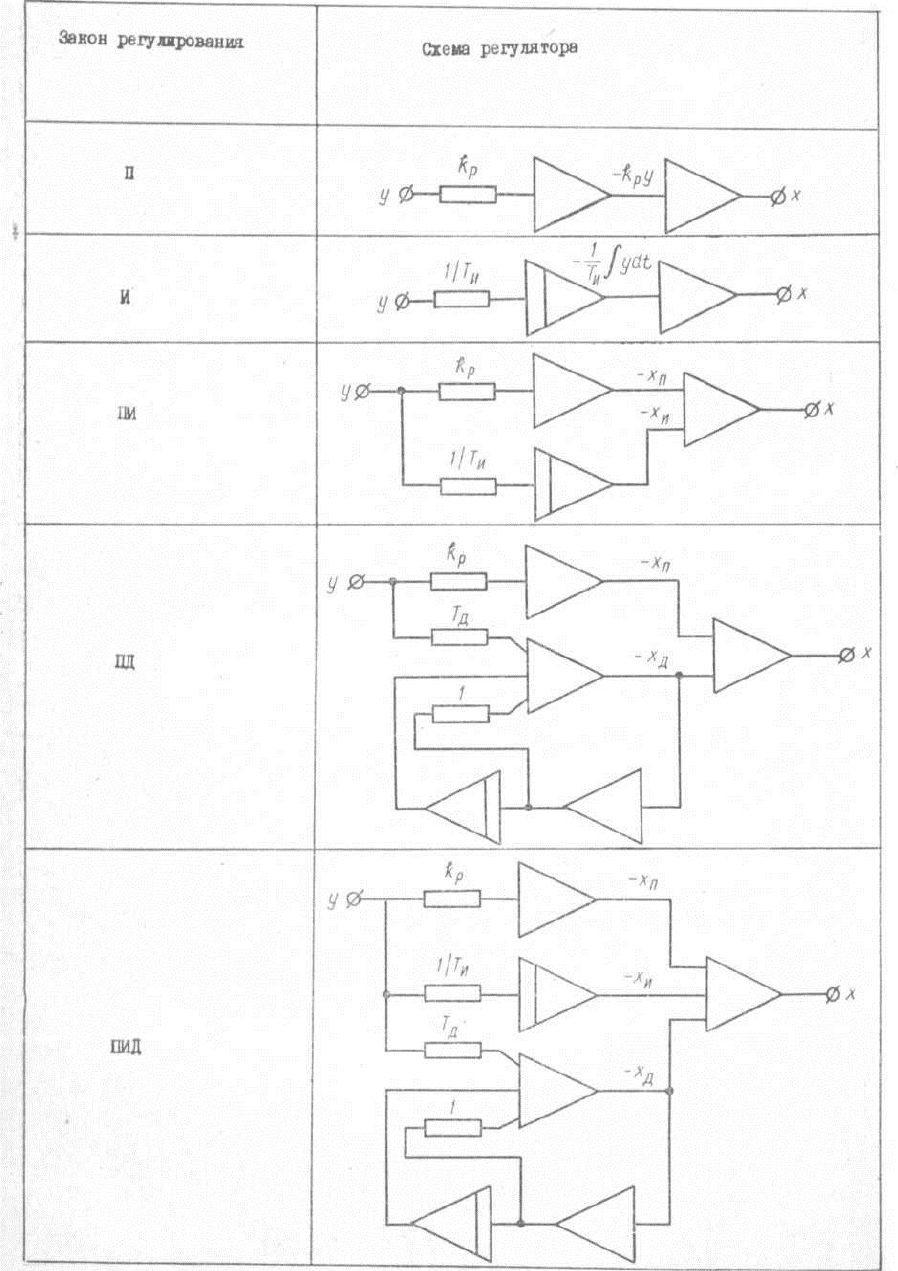
При исследовании АСР применяют два метода составления схемы набора
задач на АВМ. По первому методу решается нормальная система дифференциаль-
ных уравнений, непосредственно воспроизводимая в машинной схеме набора. По
второму методу задачу набирают по структурной схеме исследуемой АСР, пере-
даточные функции звеньев которой известны. Структурные схемы моделирования
различных объектов приведены в табл. V.1, а схемы моделирования регуляторов
непрерывного действия, отрабатывающих стационарные законы регулирования, —
в табл. V.2.
При моделировании АСР запаздывание объектов вводится в схемы набора с
помощью блоков постоянного или регулируемого запаздывания. Запаздывание
воспроизводится также с помощью специальных схем. При этом реализуются при-
ближенные передаточные функции звена запаздывания, которые можно получить,
например, разложив экспоненциальную функцию в дробный ряд Паде и взяв два
члена ряда
(
)
(V, 12)
или приближенно описать формулой
(
)
( )
( )
(V, 13)
Структурные схемы воспроизведения запаздывания по этим уравнениям по-
сле их преобразования приведены на рис. V-8. Для изменения времени запаздыва-
ния т изменяют коэффициенты усиления решающих усилителей. Возможны и дру-
гие схемы.
На базе схем, приведенных в табл. V.1 и V.2, в качестве примера составлена
электрическая модель системы, состоящей из устойчивого объекта 1-го порядка с
запаздыванием и ПИ - регулятора (рис. V-9). С помощью такой модели могут быть
получены графики переходных характеристик данной системы при различных зна-
чениях предела пропорциональности и времени интегрирования регулятора (рис.
V-10). Эти кривые показывают, как влияют параметры настройки регулятора на
качество регулирования.
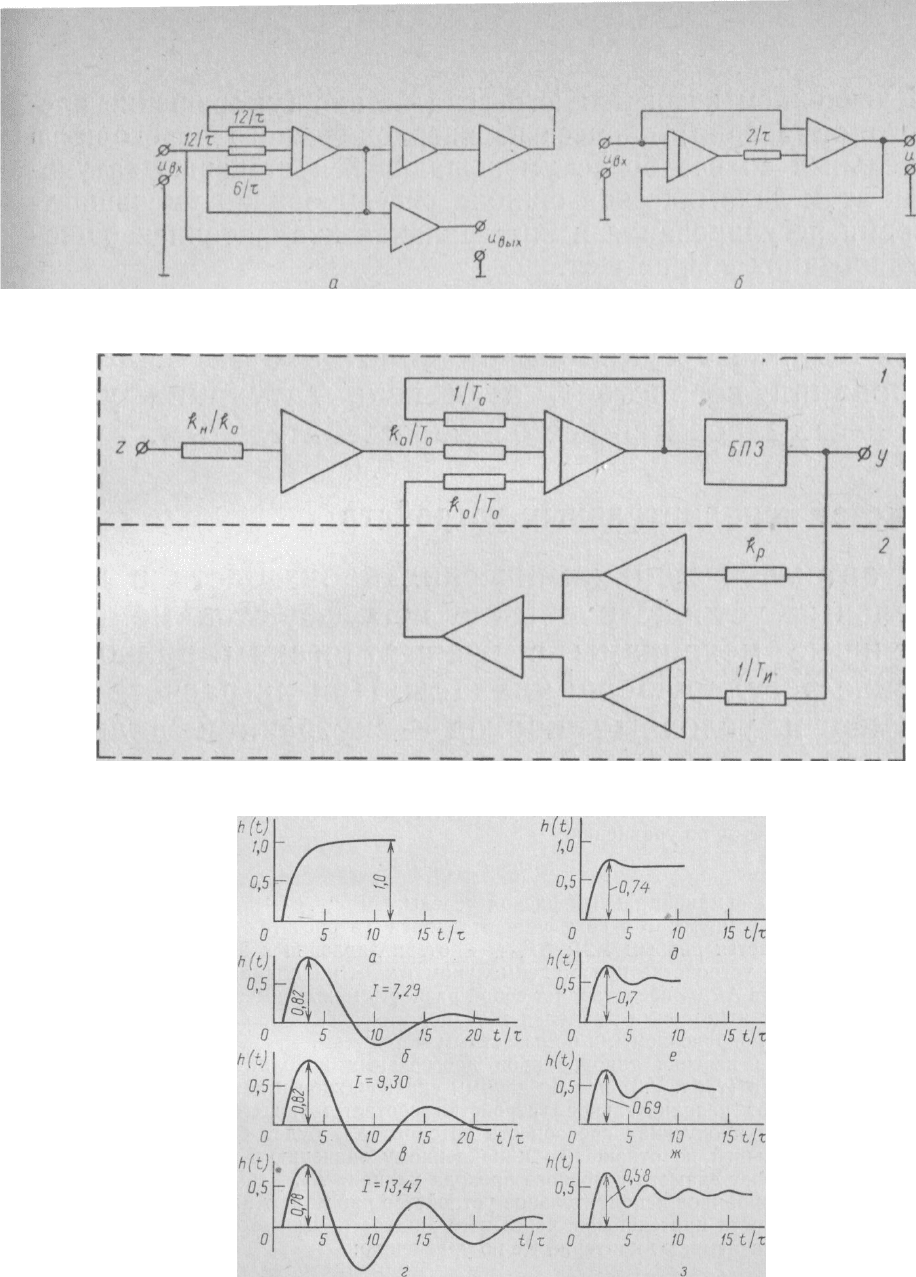
При введении интегральной составляющей в закон регулирования (кривые
б—г) статическая ошибка регулирования исчезает.
191
Таблица V.I. Структурные схема моделирование объектов
192
Таблица V. 2. Структурные схемы моделирования регуляторов
193
Рис. V-8. Структурные схемы воспроизведения запаздывания: а — по урав-
нению (V.12); б — то же (V,13).
Рис. V-9. Структурная схема набора АСР, состоящей из устойчивого объекта 1-го поряд-
ка с запаздыванием (1) и ПИ-регулятора (2); БПЗ — блок постоянного запаздывания.
Рис. V-10. Влияние постепенного возрастания интегральной (б—г) и пропорциональной
(д—з) составляющих регулятора на переходную характеристику устойчивого объекта 1-го по-
рядка с запаздыванием (а) при k
0
= k
H
=l и τ/Т
0
=1.