Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.

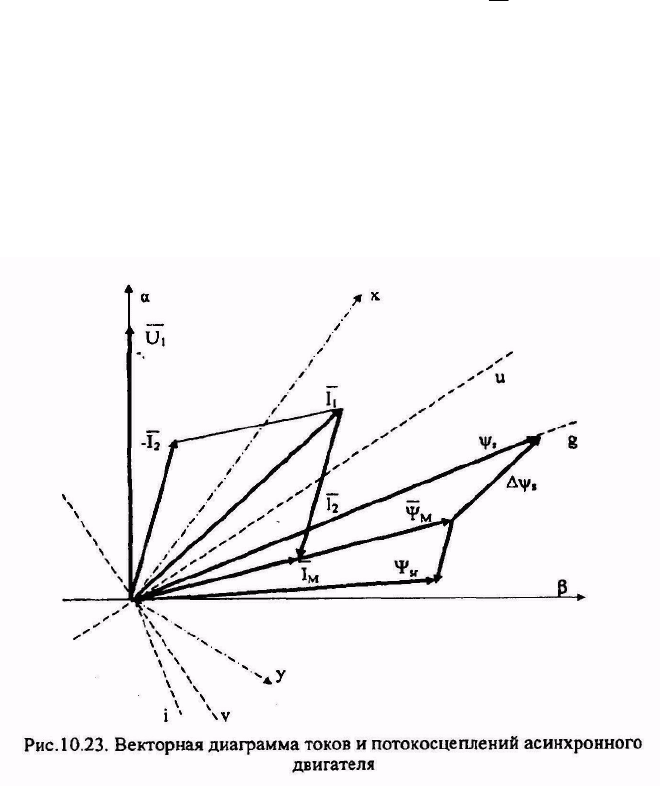
статором - (координаты a - β), a координаты, оси которых либо вращаются в
пространстве с постоянной скоростью (координаты х-у), либо координаты, свя-
занные с одним из контролируемых векторов - на рис. 10.23 - это координаты
g-i, связанные с вектором потокосцепления статора
s
Ψ
.
Системы векторного управления обычно строятся по принципу подчи-
ненного регулирования. Внешний контур - контур скорости осуществляет ре-
гулирование скорости и дает задание внутреннему контуру - контуру момента,
который выполняется в векторной форме.
10.8. Контрольные вопросы для самопроверки
1. Назовите виды электрических защит, применяемых в электроприво-
дах.
2. Какими аппаратами осуществляется максимально-токовая защита?
3. Что такое нулевая защита?
4. Для чего нужна минимально-токовая защита в электроприводах по-
стоянного тока?
5. Как реализуется температурная защита электрических двигателей?
6. Сколько контакторов должно быть в схеме для управления двухско-
ростным асинхронным двигателем?
7. Как предотвращается возможность одновременного включения кон-
такторов «вперед» и «назад» в реверсивных магнитных пускателях?
8. С помощью каких аппаратов производятся автоматические переклю-
чения ступеней роторного сопротивления при пуске асинхронного двигателя с
фазным ротором?
9. В чем основное отличие замкнутых систем регулирования от разомк-
нутых?
10. Назовите виды обратных связей, используемых в системах
регули-
рования электроприводов.
11. Какие обратные связи используются для формирования статических
механических характеристик электропривода?
12. В каких режимах проявляется действие гибких обратных связей?
13. Дайте классификацию систем регулирования по выполняемым
функциям.
14. С помощью каких обратных связей получают жесткие механические
характеристики с отсечкой по моменту (току)?
15. Поясните принцип подчиненного регулирования параметров элек
-
тропривода.
16. Укажите целесообразный тип регулятора для контура тока.
17. Какие существуют стандартные настройки для контура скорости?
18. Приведите характеристику переходного процесса в контуре скоро-
сти, настроенном на модульный оптимум, если на вход подать единичный сиг-
нал.
19. Сколько контуров будет иметь система регулирования положения?
20. Укажите основные разновидности систем регулирования асинхрон-
ного
привода с частотным управлением.
Глава 11. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕК-
ТРОПРИВОДА
11.1. Энергетические показатели электропривода
На долю электропривода приходится около 2/3 всей вырабатываемой
электроэнергии, поэтому вопрос о том, насколько эффективно используется эта
электроэнергия, имеет огромное техническое и экономическое значение.
Электрические приводы питаются (за исключением транспортных или
мобильных машин) от промышленной сети переменного тока частотой 50 Гц.
Электроприводы потребляют (а при работе в рекуперативном тормозном ре-
жиме и отдают
) из сети активную мощность. Активная мощность расходуется
на совершенствование полезной работы и покрытие потерь во всей элек-
тромеханической системе рабочей машины.
Анализируя эффективность использования электрической энергии, сле-
дует различать энергетическую эффективность самого технологического про-
цесса, который осуществляется рабочей машиной с электроприводом, и эффек-
тивность собственно электропривода, характеризуемую его коэффициентом
полезного
действия - кпд, который представляет собой отношение выходной
мощности данного устройства к входной мощности. Кпд определяют также как
отношение полезной мощности (или энергии) к затраченной.
РР
Р
Р
Р
Р
Р
пол
пол
затр
пол
вх
вых
Δ+
===
η
(11.1)
где
η
η
)1( −
=Δ
пол
Р
Р
- потери в данном устройстве.
Поскольку силовая часть электропривода состоит из элек-
тродвигательного, передаточного и преобразовательного устройств, то кпд
электропривода в целом определяют как произведение кпд этих устройств
преобпердв
η
η
η
η
⋅
⋅
=
Кпд электродвигателя есть отношение механической мощности на валу
двигателя к потребляемой со стороны обмоток статора (для машин постоянного
тока - со стороны якоря).
РР
Р
Р
Р
мех
мех
затр
мех
дв
Δ+
==
η
.

Номинальный кпд асинхронных двигателей мощностью от 0,1-15,0 кВт
составляет 0,85-0,9. С ростом мощности номинальный кпд повышается и у
крупных высокоскоростных двигателей переменного тока мощностью свыше
1000 кВт может достигать величины 0,97.
Кпд электродвигателей существенно зависит от нагрузки на валу двига-
теля. Для анализа этой зависимости пользуются методом разделения потерь ∆Р
на постоянные К и
переменные V.
VКР
+
=
Δ
(11.2)
Для нерегулируемых по скорости двигателей постоянные потери скла-
дываются из:
- потерь в стали;
- механических потерь, в том числе на самовентиляцию;
- добавочных потерь.
Переменные потери зависят от квадрата тока в обмотках машины и бу-
дут равны:
- для машин постоянного тока
яя
RIV
2
= ;
- для асинхронных двигателей сумме потерь в обмотках статора и рото-
ра
2
2
21
2
1
33 rIrIV += .
Потери в роторной цепи согласно (6.8) пропорциональны моменту на
валу двигателя и скольжению
SMrI
02
2
2
3
ω
⋅= .
Ориентировочно можно считать, что потери в обмотках статора отно-
сятся к потерям в обмотках ротора в соотношении r
1
,/r
2
. Тогда переменные по-
тери для асинхронных двигателей будут
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+⋅=
2
1
0
1
r
r
SMV
ω
(11.3)
Задача 11.1. Найти кпд асинхронного двигателя 4АИ160S4 при работе с
нагрузкой 50%. Номинальные технические данные двигателя: Р
н
=18,5 кВт; ω
ном
= 152 1/с; η
н
= 0,88 ; r
1
,/r
2
= 0,6.
Решение.
1 . Потери в двигателе в номинальном режиме
Вт
Р
Р
н
нн
н
2520
88,0
)88,01(18500
)1(
=
−
=
−
=Δ
η
η
2. Переменные потери в номинальном режиме
Вт
r
r
S
Р
V
н
н
н
н
1110)6,01(033,0157
152
18500
1
2
1
0
=+⋅⋅=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
ω
ω
3.
Постоянные потери
ВтVРК
нн
141011102520
=
−
=
−
Δ
=
4. При нагрузке на валу М
с
=0,5М
н
двигатель будет работать со сколь-
жением примерно равным S=0,5S
н
. Тогда переменные потери в этом режиме
будут
ВтV
r
r
SМV
ннн
278111025,025,015,05,0
2
1
05,0
=⋅==
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
ω
5. Потери в двигателе в этом режиме
ВтVКР 16882781410
5,05,0
=
+
=
+
=
Δ
6.Кпд двигателя при нагрузке 50% будет
845,0
1688185005,0
185005,0
5,0
5,0
5,0
5,0
=
+⋅
⋅
=
Δ+
=
РР
Р
н
н
η
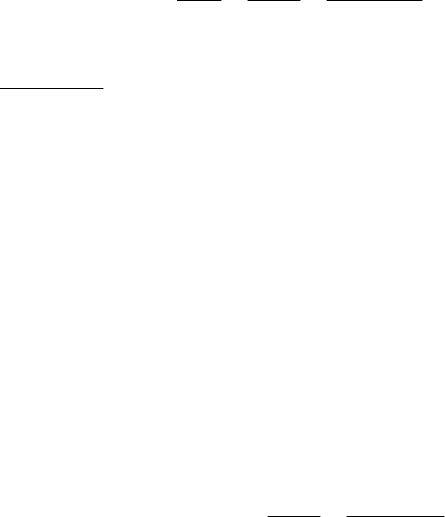
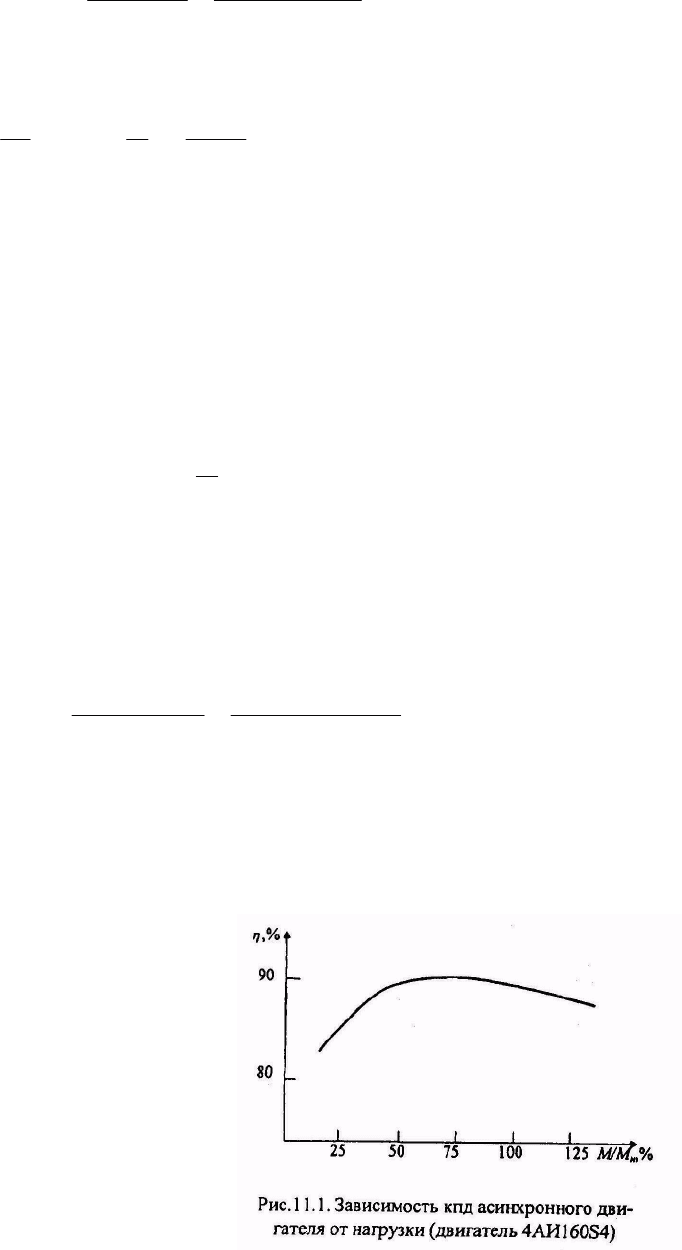
Мы видим, что при работе с неполной нагрузкой кпд двигателя снижа-
ется. Типичная кривая зависимости кпд от загрузки двигателя показана на рис.
11.1.
Отсюда следует, что завышение
установленной мощности двигателя ве-
дет к снижению его эксплуатационного
кпд, т.е. к непроизводительному расходу
электроэнергии.
Кпд преобразовательного уст-
ройства, если последнее выполнено
на ба-
зе силовых полупроводниковых приборов,

довольно велико. Потери в преобразователе определяются, главным образом,
величиной прямого падения напряжения в полупроводниковом приборе. В
среднем можно считать, что ∆U = 2 В, для мостовых схем - 4,0В. Таким обра-
зом, номинальные потери для преобразователей напряжением 440В составляют
1%, а для преобразователей напряжением 220В - 2%. С учетом потерь в реак-
тивных элементах полупроводниковых преобразователей
можно полагать, что
их кпд составляет 0,95-0,98.
Потери в механическом передаточном устройстве: редукторе, транс-
миссии и др., определяются, главным образом, силами трения. Величина этих
потерь, а, следовательно, кпд механической передачи зависит от типа исполь-
зуемых подшипников, класса обработки зубчатых колес, систем смазки и др.
Кпд механической передачи не остается постоянным, а существенно
зависит от
величины передаваемого момента.
Под кпд рабочей машины понимают произведение кпд электропривода
η
эп
на кпд собственно рабочей машины. Так, для вентиляторной установки
затр
эпвенуствен
Р
НQ
3
.
10
−
⋅⋅
==
ηηη
(11.4)
Здесь Q - производительность вентилятора, м
3
/с;
Н- напор, Па;
η
вен
- аэродинамический кпд вентилятора;
Р
затр
- затраченная электрическая мощность.
Если рабочая машина работает в энергетически постоянном режиме, то
ее энергоемкость, выражаемая через кпд, определяется по (11.4). Если рабочая
машина работает циклически (например, лифты, грузоподъемные механизмы,
продольно-строгальные станки и многие другие), то более правильно кпд рабо-
чей машины определять по затратам энергии за цикл работы
цполц
полц
затрц
полц
рм
WА
А
W
W
Δ+
==
.
.
.
.
η
(11.5)
где
,)(,)(,)(
00
.
0
.
∫∫∫
=Δ=Δ=
ццц
t
полц
t
ползатрц
t
полполц
dttРWdttРWdttРА
- соответственно полезная работа за цикл, затраченная энергия за цикл,
потери энергии за рабочий цикл.
В сети переменного тока, питающей электропривод, циркулирует реак-
тивная мощность. Негативным результатом наличия реактивной мощности яв-
ляется загрузка питающей сети реактивным током, не создающим работы. Ве-
личина реактивной мощности оценивается величиной cos φ, где под углом φ
понимается фаза сдвига первой гармоники тока от первой гармоники напряже-
ния. У асинхронных короткозамкнутых двигателей номинальный cos φ состав-
ляет примерно 0,7-0,8. Недогрузка асинхронного двигателя ведет к дальнейше-
му снижению cos φ.
В приводах по системе ТП-Д (см. раздел 5.3) cos φ = cos a , что опреде-
ляется запаздыванием, устанавливаемым системой импульсно-фазового управ-
ления, открывания тиристоров
. Поэтому в приводах ТП-Д при высокой скоро-
сти вращения cos φ в питающей сети переменного тока будет высоким (0,8-0,9),
по мере снижения скорости, когда угол а растет, cos φ будет уменьшаться. При
включении привода ТП-Д имеют место броски реактивной мощности.
В современных системах регулируемого электропривода стремятся ис-
пользовать неуправляемые выпрямители, осуществляя
регулирование величи-
ны напряжения, подаваемого к обмоткам двигателя, широтно-импульсными
методами (см. например, схемы рис.5.29, 6.12). В этом случае cos φ в питающей
сети будет не ниже 0,95.
С точки зрения компенсации реактивной мощности многих потребите-
лей электроэнергии эффективно использование для нерегулируемых электро-
приводов синхронных двигателей большой мощности, которые при перевозбу-
ждении способны генерировать
реактивную мощность для ее компенсации в
пределах энергосистемы данного предприятия.
11.2. Потери энергии в переходных режимах
Потери энергии в переходных режимах, как правило, возрастают, по-
скольку эти процессы сопровождаются большими бросками тока. Так, при пус-

ке асинхронного короткозамкнутого двигателя пусковые токи составляют 5-6
номинального. В процессе разгона двигатель должен не только преодолевать
момент сопротивления, но и создавать динамический момент, идущий на уве-
личение кинетической энергии движущихся масс.
Рассмотрим потери энергии в короткозамкнутом асинхронном двигате-
ле за время пуска вхолостую (М
с
=0). В процессе пуска двигатель, разгоняясь,
проходит скольжения от 1 до 0. В этот период в роторе выделяются значитель-
ные потери энергии, что особенно неблагоприятно для короткозамкнутых дви-
гателей, где эти потери не могут быть вынесены из машины в пусковые со-
противления.
Так как потери в роторе пропорциональны моменту и скольжению
SМР
0
ω
⋅
=
Δ
,
то потери энергии за один пуск будут:
∫
⋅⋅=Δ
n
t
dtSMA
0
0
ω
(11.7)
При пуске вхолостую М =J
Σ
.(dω/dt), подставляя это значение момента в
(11.7) и соответственно заменяя пределы интегрирования, получим:
∫∫
−==Δ
ΣΣ
00
0
0
0
0
)(
ωω
ωωωωω
dJSdJА
2
2
0
ω
Σ
=Δ
J
A (11.8)
Отсюда вытекает правило, что при пуске асинхронного двигателя вхо-
лостую потери в цепи его ротора равны запасу кинетической энергии, который
получают приходящие в движение маховые массы ротора двигателя и рабочего
механизма при их разгоне до установившейся скорости.
Заметим, что потери в роторе не зависят от времени пуска, пусковых
токов и
других параметров. Потери в статоре, напротив, зависят от параметров
пуска.
Во избежание перегрева для каждого короткозамкнутого двигателя су-
ществует предельное значение суммарного момента инерции, который может

преодолеть данный двигатель. При пуске значение J
Σпред
указывается в катало-
гах. При отсутствии этих данных величина J
Σпред
может быть определена из
следующих соображений.
Допустимая величина энергии, выделяющейся в клетке ротора массой
m
кл
, не должна приводить к ее перегреву более чем на Т
пер
= 300°С. Отсюда
перклклдоп
ТСmА
=
Δ
где С
кл
, - Дж/кг.гр - теплоемкость материала клетки ротора. Расчет про-
водится исходя из необходимости обеспечения двух пусков подряд. Поэтому
2∆А < m
кл
· С
кл
·300. Из этих условий получим:
2
0
300
ω
⋅
⋅
〈
Σ
клкл
пред
Сm
J
.
Потери энергии в роторной цепи двигателя при динамическом тормо-
жении от скорости сой до минимальной скорости (затормозить двигатель до
нулевой скорости при динамическом торможении нельзя) также равны запасу
кинетической энергии, которой обладали движущиеся массы ротора и рабочей
машины.
При торможении противовключением двигатель работает при еще
больших скольжениях - от S
нач
=2 до S=1. Подставляя эти значения в (11.7), по-
лучим, что
2
3
2
0
ω
Σ
=Δ
J
А
првк
.
Для асинхронного двигателя важно определить потери при пуске и тор-
можении не только в роторной, но и в статорной цепи. Ориентировочно эти по-
тери можно найти, зная потери в роторе и пользуясь соотношением
'
2
1
r
r
AA
ротcn
⋅Δ=Δ
Потери в статоре могут быть сокращены, используя, например, сниже-
ние напряжения на статоре при пуске (если это возможно).
При плавном изменении ω
0
в соответствии с заданным темпом разгона
(при частотном управлении асинхронным двигателем или плавном повышени-
ем напряжения в приводах постоянного тока) двигатель работает с малыми
скольжениями и потери в двигателе, как и в установившемся режиме, опреде-
ляются величиной развиваемого момента.
11.3. Нагрев и охлаждение двигателя
Выделение потерь ∆Р в объеме двигателя вызывает его нагрев. Прове-
дем упрощенный анализ процессов нагрева и охлаждения. Примем допущение,
что двигатель в тепловом отношении представляет собой однородное твердое
тело, характеризующееся:
-
теплоемкостью С Дж/гр, которая показывает сколько тепловой энер-
гии необходимо, чтобы повысить температуру двигателя на 1 градус;
- коэффициентом теплоотдачи А Дж/гр.с, показывающим сколько тепла
отдает двигатель окружающей среде за 1 сек при превышении температуры
двигателя τ над температурой окружающей среды в 1 градус.
Уравнение теплового баланса будет
dtAdCdtР
⋅
⋅
+
⋅
=
⋅
Δ
τ
τ
(11.11)
где τ - превышение температуры двигателя над температурой окру-
жающей среды.
Первый член уравнения (11.11) характеризует потери в двигателе, кото-
рые преобразуются в тепло, второй член - количество тепла, идущее на нагрев
двигателя, третий - количество тепла, которое двигатель отдает окружающей
среде. В первое время после включения двигателя, когда его температура еще
мало отличается
от температуры окружающей среды (τ =0), отдача тепла в ок-
ружающую среду отсутствует и третий член уравнения (11.11) равен нулю. По
мере нагрева двигателя все большая часть выделяемого в двигателе тепла пере-
дается в окружающую среду и, когда достигается равновесие между количест-
вом выделяемого тепла и отдаваемого в окружающую среду, температура дви-
гателя
становится постоянной - установившейся.
Преобразовав уравнения (11.11) к нормальному виду при условии ∆Р =
const , получим