Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.

2. Системы регулирования скорости, в которых задание скорости опре-
деляется оператором и отрабатывается электроприводом с требуемой точно-
стью.
3. Следящие системы электропривода - это замкнутые системы регули-
рования положения в соответствии с произвольно изменяющимся входным
сигналом управления, обеспечивающим воспроизведение рабочим органом
движения объекта слежения. Следящие системы применяются в электроприво-
дах копировально-фрезерных станков
, в системах наведения радиолокацион-
ных станций, которые работают в режиме слежения за летящими и при этом
маневрирующими объектами и др.
4. Системы с программным управлением - это системы, в которых при
выполнении технологического процесса сигнал задания и регулируемые пара-
метры изменяются по заданному закону, заложенному в программное устрой-
ство. Системы электропривода с
числовым программным управлением находят
применение в приводах металлорежущих станков.
5. Адаптивные системы - это такие замкнутые системы регулирования,
в которых автоматически выбираются целесообразные режимы работы элек-
троприводов в зависимости от конкретной технологической ситуации и усло-
вий работы объекта.
Системы регулирования электроприводов постоянного тока ТП-Д вы-
полняются
- с суммирующим усилителем;
с
подчиненным регулированием параметров электропривода.
Системы регулирования частотно-управляемых асинхронных элек-
троприводов по принципам регулирования различаются:
- системы параметрического управления;
- частотно-токовые системы управления;
- системы векторного управления.

10.5. Система регулирования электропривода постоянного тока с
суммирующим усилителем
Функциональная схема электропривода постоянного тока по системе
ТП-Д с обратной связью по скорости приведена на рис. 10.9. Уравнение меха-
нических характеристик для этой системы в соответствии с (4.7) будет:
замк
d
замк
з
М
С
U
М
ββ
ωω
−=−=
0
(10.1)
где: ω
0з
- скорость холостого хода в замкнутой системе регулирования;
β
замк
- абсолютные значения жесткости механических характеристик в
замкнутой системе управления;
U
d
- э.д.с. преобразователя, питающего якорную цепь двигателя.
Как было показано в разделе 4.2, в системах управления с отрицатель-
ной обратной связью по скорости жесткость β механических характеристик
β
замк
увеличивается по сравнению с жесткостью характеристик в разомкнутой
системе в (1+К) раз, где К - коэффициент усиления разомкнутой системы. Для
рассматриваемой схемы этот коэффициент будет
С
ккк
К
спу
= (10.2)
Здесь: к
у
- коэффициент усиления усилителя;
к
п
=E
d
/u
y
- коэффициент усиления преобразователя;
к
с
= u
осс
/ω - коэффициент обратной связи по скорости;
С=кФ - машинная постоянная.
Электропривод с рассматриваемой схемой управления описывается
следующей системой уравнений

я
яцяd
упуd
сзсоссзсу
IСМ
RIСU
иккU
кииии
⋅=
+⋅=
=
−
=
−
=
ω
ω
(10.3)
Из этих уравнений получим выражение для механических характери-
стик привода в замкнутой системе
)1()1( К
М
Кк
ки
с
зс
+
−
+
=
β
ω
(10.4)
Механические характеристики и принцип их формирования в замкну-
той по скорости системе управления представлена на рис.4.5. Из (10.4) следует,
что для увеличения жесткости механических характеристик нужно увеличивать
коэффициент усиления К, что может достигаться увеличением коэффициента
усилителя к
у
.
Обычно по условиям эксплуатации технологических установок и усло-
виям коммутации на коллекторе двигателя необходимо ограничивать макси-
мальный момент, развиваемый двигателем, на уровне (2+3)М
н
. С этой целью в
замкнутых системах электропривода применяется задержанная отрицательная
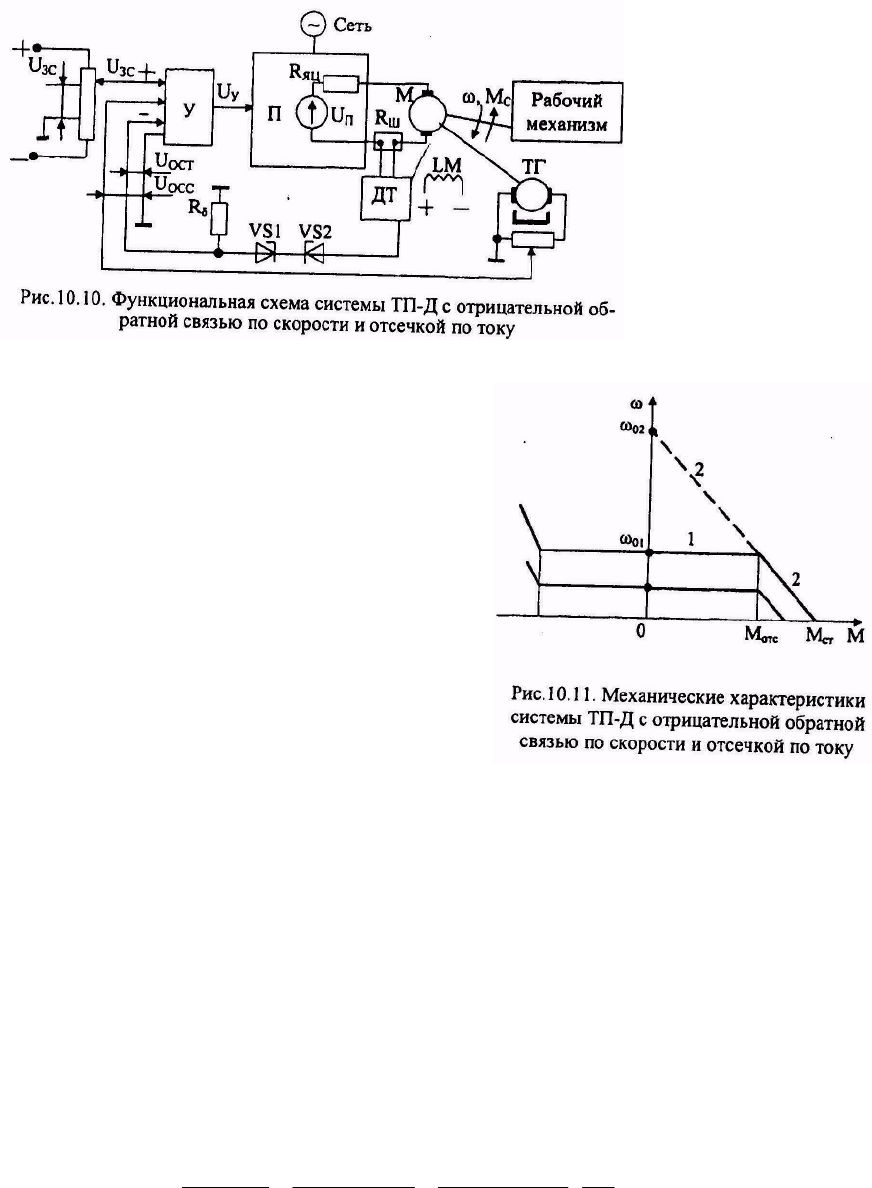
обратная связь по току якоря, называемая токовой отсечкой. Функциональная
схема электропривода постоянного тока с отрицательной обратной связью по
скорости и токовой отсечкой приведена на рис. 10.10. Токовая отсечка в этой
схеме реализована на стабилитронах VS1 и VS2. Уравнения цепи обратной свя-
зи по
току будет:
и
ост
= 0, если |I
я
| ≤ I
отс
и
ост
= (|I
я
| - I
отс
)к
м
, если |I
я
| > I
отс
I
отс
- ток якоря, при превышении которого вступает в действие отрица-
тельная обратная связь по току;
и
ест
- сигнал (напряжение) отрицательной обратной связи по току.
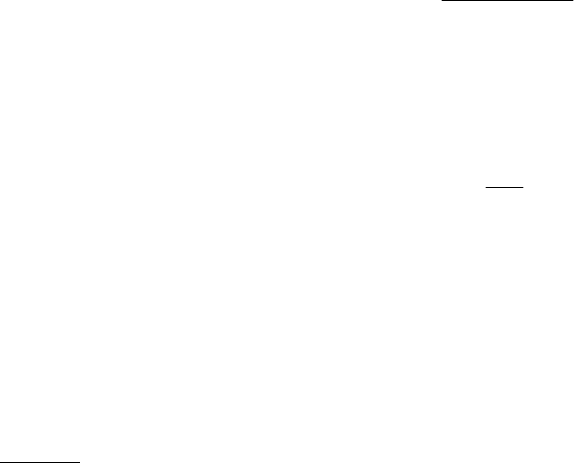
В результате совместного действия
отрицательных обратных связей по ско-
рости и току формируется механическая ха-
рактеристика (см. рис. 10.11), которая состоит
из двух участков: рабочего(1) с высокой же-
сткостью и участка (2) ограничения момен-
та. На рабочем участке, пока не действует
отрицательная обратная связь по току, меха-
нические характеристики описываются уравне-
нием (10.4).
При I
я
> I
отс
работа электропривода может быть описана следую-
щими уравнениями
я
яцяd
упуd
Тотсясзсостоссзсу
IСМ
RIСЕ
иккЕ
кIIкиииии
⋅=
+⋅=
=
−
−
−
=
−
−=
ω
ω
)(
(10.5)
В результате решения этой системы уравнений относительно ой полу-
чим уравнение механической характеристики для второго участка
22
1
)1(
)1(
С
М
К
кккR
КС
Мккк
КС
икк
ТпуяцотсТпузспу
⋅
+
+
−
+
+
+
=
ω
(10.6)
Первые два слагаемых уравнения (10.6) определяют скорость идеального холо-
стого хода механической характеристики для второго участка
020102
ω
ω
ω
Δ
+
=
.
Жесткость механической характеристики на втором участке будет
тпуяц
замк
кккR
КС
+
+
=
)1(
2
2
β
Э.д.с. преобразователя U
d
при работе двигателя с замкнутой системой
управления не остается постоянной, а изменяется в соответствии с уравнением
М
С
R
CU
яц
d
+=
ω
.
На рабочем участке механической характеристики скорость примерно
постоянна. С увеличением нагрузки на валу двигателя U
d
возрастает. После пе-
рехода на второй участок и дальнейшем повышении нагрузки скорость снижа-
ется до нуля, наступает режим стопорения и U
d
уменьшается до величины
С
RМ
U
яцст
d
=
Таким образом, для формирования желаемой механической характери-
стики преобразователь должен иметь необходимый запас по величине Е
d
в со-
ответствии с соотношением
яцотснмаксd
RIСU
+
=
ω
.
В этом случае жесткость верхней механической характеристики β
замк1
будет постоянной при всех нагрузках в плоть до М
отс
.
10.6. Многоконтурные системы с подчиненным регулированием
параметров электропривода
Для решения задач синтеза замкнутых систем электропривода, обла-
дающих хорошим быстродействием и желаемым характером переходных про-
цессов, разработан инженерный метод синтеза, получивший название метода
последовательной коррекции с подчиненным регулированием параметров или
сокращенно метод подчиненного регулирования.
После формирования требуемых статических характеристик в электро-
приводе с системой регулирования с суммирующим усилителем может ока-
заться, что его динамические характеристики (поведение системы в переход-
ных режимах) будут неприемлемы: будет велика колебательность, перерегули-

рование, недостаточно быстродействие. В этом случае необходимо введение в
систему регулирования корректирующих устройств и/или гибких обратных
связей, действующих только во время переходных процессов. Методы коррек-
ции динамических характеристик в схемах с суммирующим усилителем рас-
смотрены в специальной литературе, например в [4].
Поскольку системы с суммирующим усилителем сложны в наладке, они
в
настоящее время применяются только для электроприводов с невысокими
требованиями к диапазону и качеству регулирования, уступив место системам
подчиненного регулирования параметров электроприводов.
Принцип подчиненного регулирования состоит в том, что каждый для
каждого из регулируемых параметров: тока, скорости и, если нужно, положе-
ния, организуется свой контур регулирования, содержащий объект регулирова-
ния, регулятор
и отрицательную обратную связь по регулируемому параметру.
В системах электропривода внутренним контуром является контур тока.
В системе привода ТП-Д объект регулирования в контуре тока состоит
из двух звеньев: тиристорного преобразователя ТП и цепи якоря двигателя по-
стоянного тока (см. рис.8.10).
Строго говоря, тиристорный преобразователь нельзя рассматривать как
пропорциональное звено с
передаточной функцией К
ТП
. Тиристорный преобра-
зователь по принципу своей работы является дискретным элементом. Воздей-
ствие на управляемый преобразователь осуществляется импульсно, подачей
отпирающего импульса на управляющий электрод тиристора. После включения
очередного тиристора воздействие на преобразователь возможно только спустя
некоторое время, когда система импульсно-фазового управления подает им-
пульс на отпирание очередного тиристора. Поэтому тиристорный
преобразова-
тель следует рассматривать как динамическое звено с запаздыванием или при-
ближенно как апериодическое звено с постоянной времени Т
μ
равной средней
величине запаздывания
1
)(
+
=
рТ
К
рW
ТП
ТП
μ
(10.7)
Величина Т
μ
принимается в пределах 0,0034-0,01с. Полупроводниковые
преобразователи с широтно - импульсным управлением также удобно пред-
ставлять в виде апериодического звена с постоянной времени
к
ТП
f
Т
1
=
где f
к
- несущая частота ШИР-преобразователя. Эти преобразователи
обладают высоким быстродействием, т.к. несущая частота обычно составляет
несколько кГц.
Якорная цепь двигателя описывается апериодическим звеном с «боль-
шой» постоянной времени Т
я
(см.8.16)
1
1
)(
+
=
рТ
R
рW
я
я
я
(10.8)
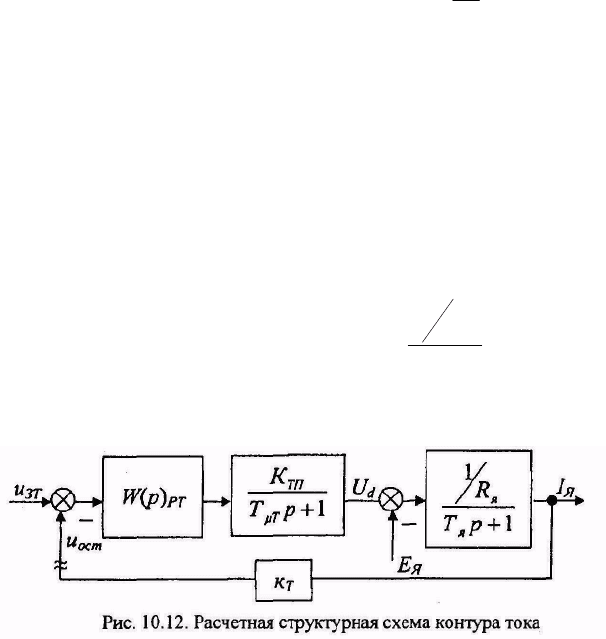
Расчетная структурная схема контура тока представлена на рис. 10.12.
Найдем передаточную функцию регулятора тока W(p)
PT
, который вклю-
чается последовательно с объектом регулирования. Тип регулятора выбирается
из условия, чтобы скомпенсировать «большую» постоянную времени в объекте
регулирования, т.е. Т
я
. Для этого в составе регулятора должно быть форсирую-
щее звено W(p) = Т
я
р + 1, которое компенсирует запаздывание, обусловленное
апериодическим звеном в объекте регулирования (см. 10.8).
Поясним, что ликвидировать постоянную времени в объекте регулиро-
вания нельзя, она вызвана физической природой объекта. Уменьшить вызван-
ное ею запаздывание можно, приложив к цепи якоря большее форсировочное
напряжение, которое затем регулятором будет снято.
Исходя из указанных соображений, передаточную функцию регулятора
тока принимают в следующем виде:
рТ
К
рТ
рТ
рТ
R
кК
а
рТ
pW
ИТ
РТ
ИТ
я
Т
я
ТТП
МТ
я
РТ
1
11
)( +=
+
=
+
=
μ
(10.9)
где:
Т
я
ТТП
МТИТ
Т
R
кК
аТ
μ
=
- постоянная времени интегрирования регулято-
ра тока;
К
РТ
= Т
я
/Т
ИТ
- коэффициент усиления регулятора тока.
Следовательно, регулятор тока представляет собой пропорционально-
интегральное звено. Передаточная функция контура тока, оптимизированного в
соответствии с (10.9) имеет вид:
1
11
)(
22
++
⋅=
рТарТа
к
рW
ТМТТМТ
Т
КТ
μμ
Учитывая, что
2
Т
Т
μ
очень мало, это выражение можно упростить и счи-
тать, что оптимизированный контур тока имеет передаточную функцию
1
11
)(
+
⋅=
рТа
к
рW
ТМТ
Т
КТ
μ
(10.10)
При ступенчатом сигнале и
зТ
установившаяся ошибка регулирования
тока равна нулю.
Передаточной функции контура тока в виде (10.10) соответствует так
называемая настройка на модульный оптимум. При
стандартной настройке а
МТ
, принимается равной а
МТ
= 2. При такой на-
стройке при подаче на вход контура единичного ступенчатого сигнала пере-
ходный процесс будет иметь следующие показатели: время нарастания до за-
данного значения t
н
= 4,7Т
μТ
, время переходного процесса t
пп
= 8,4Т
μТ
, перерегу-
лирование σ = 4,3 %.
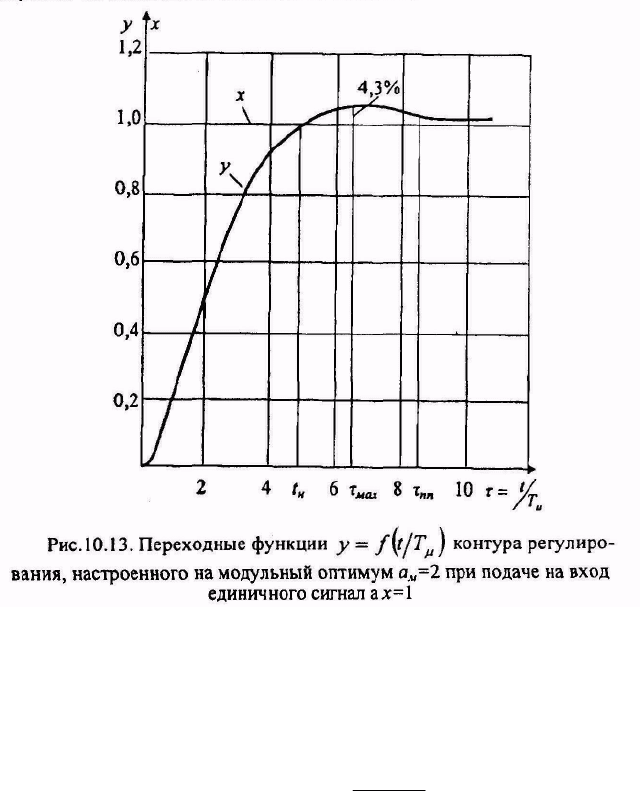
Переходный процесс в контуре тока у = I
я
= f(t) при на настройки на
модульный оптимум показан на рис. 10.13.
Коэффициент обратной связи по току рассчитывается из соотношения
допмакс
зТмакс
Т
I
и
к
.
=
где: и
зТмакс
=8В - для серийных операционных усилителей с учетом воз-
можных перерегулирований.
I
макс.доп
- максимально допустимый ток якоря.
ПИ-регулятор тока обычно реализуется на операционных усилителях по
схеме рис.10.14. Для этой схемы
освхИТвхосРТ
СRТRRК
=
=
,/
В системе подчиненного регулирования заданием на контур тока явля-
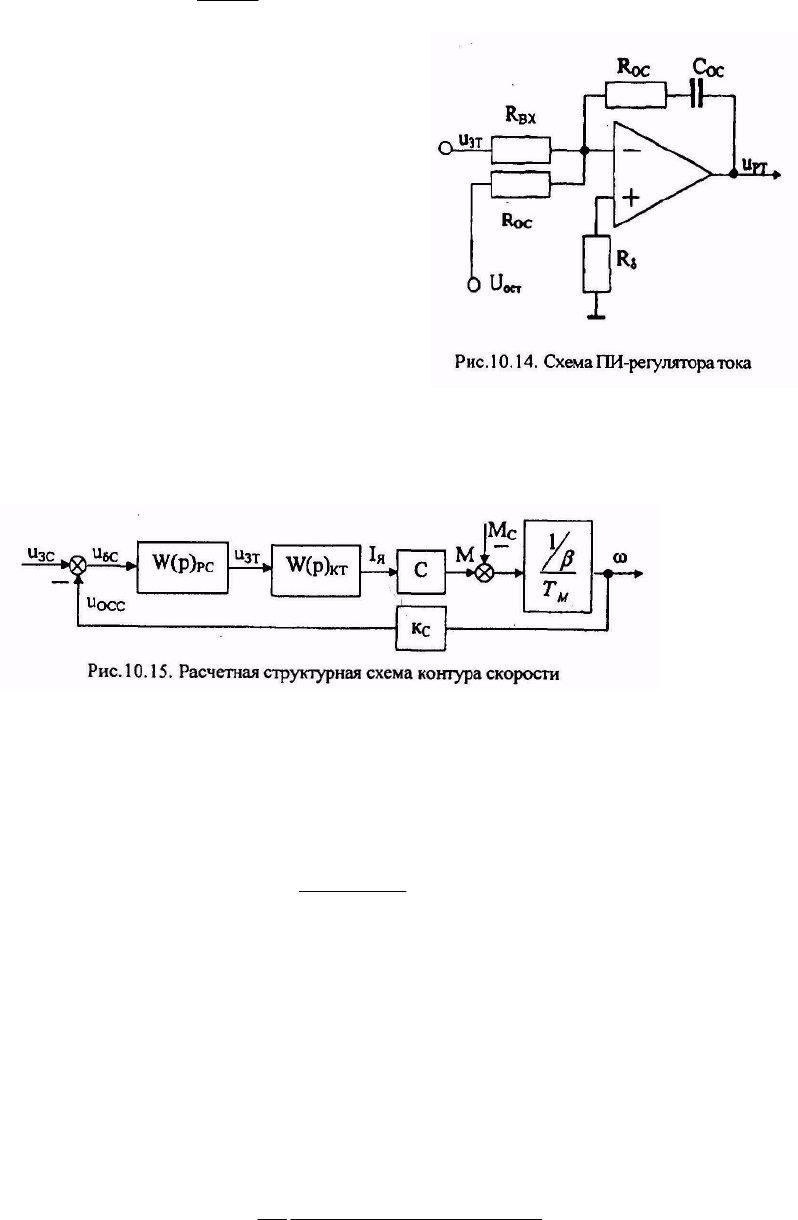
ется выходной сигнал регулятора скорости.
В контуре скорости объектом регулирования в соответствии со струк-
турной схемой двигателя постоянного тока (см. рис.8.5) является механическая
часть электропривода, представляющая собой интегрирующее звено с переда-
точной функцией (см.8.11)
рТ
pW
м
β
1
)( =
и контур тока, имеющий передаточную
функцию (10.10)
Расчетная структурная схема контура
скорости приведена на рис.10.15.
При настройке контура скорости на
модульный оптимум будем стремиться ком-
пенсировать «большую» постоянную времени
Т
м
, а «малая» постоянная времени а
МТ
Т
μТ
оста-
ется нескомпенсированной.
Полагая некомпенсируемую постоянную времени контура скорости
Т
μс
=а
МТ
Т
μТ
, получим передаточную функцию регулятора скорости, который
должен иметь передаточную функцию
рс
сСмс
мТ
рсмо
К
ТСка
Тк
pW ==
μ
β
)( (10.11)
Таким образом, для настройки контура скорости на МО следует приме-
нять П-регулятор с коэффициентом усиления К
рс
. Значение а
мс
при стандартной
настройке принимают равным а
мс
=2.
Передаточная функция контура скорости по задающему воздействию
при настройке на модульный оптимум (МО) будет:
1
11
)(
22
++
=
→
рТарТа
к
pW
СмССмС
С
моU
зс
μμ
ω
(10.12)
Характер переходного процесса у = ω = f(t) в контуре скорости при по-
даче на вход контура единичного сигнала х=1 и к
с
=1 идентичен показанному на
рис. 10.13: время нарастания до заданного значения t
н
= 4,77Т
μС
, время пере-