Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.

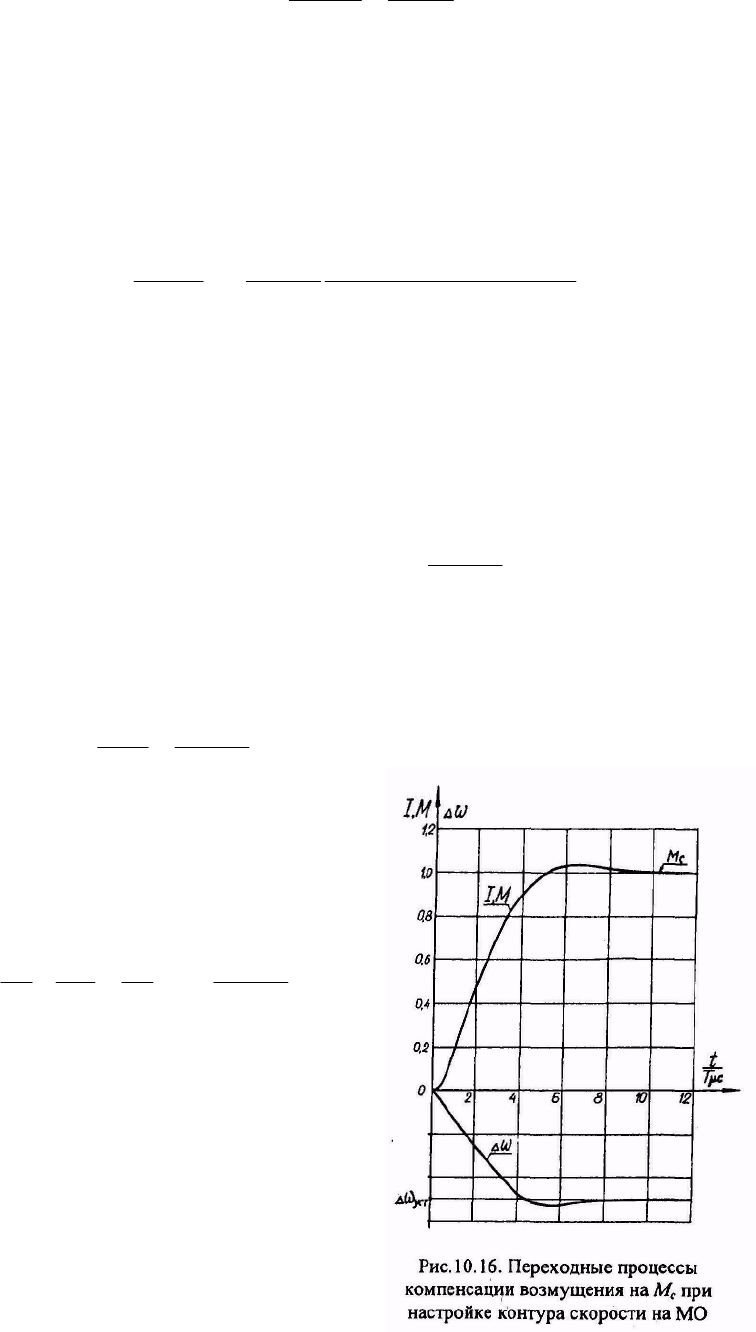
ходного процесса t
пп
= 8,47Т
μС
, перерегулирование σ=4,3%, число колебаний
п
к
=1.
Коэффициент обратной связи по скорости рассчитывается из соотноше-
ния
н
максзс
н
максосс
С
ии
к
ωω
..
==
где и
зс.макс
=8 В - для серийных операционных усилителей с учетом воз-
можных перерегулирований.
Передаточная функция контура скорости, по возмущению от момента
сопротивления при настройке на МО имеет следующее выражение
1
)1(
)(
)(
)(
22
++
+
−=
Δ
=
Δ→
рТарТа
рТ
Т
Та
рМ
р
pW
СмССмС
С
м
СмС
с
Мс
μμ
μμ
ω
β
ω
(10.13)
Из передаточной функции (10.13) следует, что контур скорости при
настройке но МО имеет статизм при воздействии по нагрузке М
с
, и ус-
тановившееся отклонение скорости от ступенчатого воздействия момента со-
противления при р→0 равно
м
СмС
сМсмуст
Т
Та
МpWрМ
с
β
ω
μ
ω
−==Δ
Δ→
)()( (10.14)
Соответственно модуль жесткости механической характеристики при
настройке контура скорости на МО определяется соотношением
СмС
мс
мо
Та
ТМ
μ
β
ω
β
=
Δ
Δ
= .
Уравнение механической характери-
стики системы регулирования скорости при
настройке контура скорости на МО
м
СмС
с
С
зс
мо
с
С
зс
мо
Т
Та
М
к
иМ
к
и
ββ
ωωω
μ
−=−=Δ−=
0
(10.15)
Статизм по моменту сопротивления
при настройке системы регулирования скоро-
сти на МО вычисляется из соотношения
[]
%100⋅
Δ
=
Δ
=
зс
С
м
СмС
зад
мс
и
Мк
Т
Та
S
βω
ω
μ
где ω
зад
= и
зс
/к
С
заданная скорость электропривода.
Самый большой статизм система имеет на нижней характеристике диа-
пазона регулирования. Поэтому с точки зрения возможного диапазона регу-
лирования скорости система с настройкой на МО имеет сравнительно низ-
кие показатели и соответственно ограниченное применение.
На рис. 10.16 приведены графики переходных процессов компенсации
возмущения от М
с
.
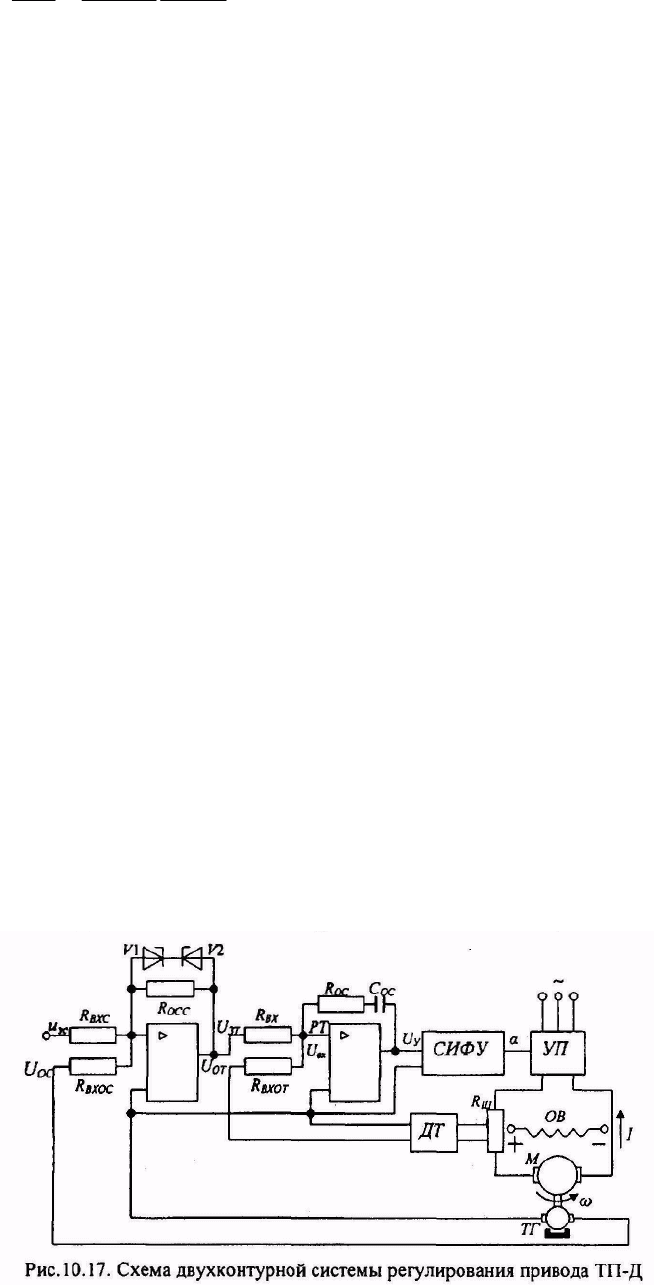
Реализация схемы подчиненного регулирования показана на рис.10.17.
В этой схеме электропривод по системе ТП-Д имеет двухконтурную
схему подчиненного регулирования с внутренним контуром тока, настроенным
на модульный оптимум, и внешним контуром скорости, настроенным также на
модульный оптимум. Двигатель постоянного тока независимого возбуждения
питается от тиристорного преобразователя УП. Напряжение преобразователя
регулируется
посредством системы импульсно-фазового управления СИФУ.
Управляющий сигнал и
у
на СИФУ поступает с выхода регулятора тока. Обрат-
ная связь по току якоря реализуется с помощью датчика тока ДТ. Измеритель-
ным элементом для этого датчика является шунт R
ш
, включенный в цепь якоря.
Контур тока подчинен контуру скорости. Задание на ток и
ЗТ
поступает с
выхода регулятора скорости PC. Ограничение этого задания (отсечка по току)
реализуется с помощью стабилитронов VI и V2, включенных параллельно ре-
гулятору скорости.
Задание на контур скорости и
зс
подается на вход регулятора скорости.
Обратная связь по скорости выполняется с помощью тахогенератора ТГ.
Задача 10.1. Электропривод по системе ТП-Д с двухконтурной систе-
мой подчиненного регулирования выполнен по структурной схеме 10.17. Кон-
туры тока и скорости настроены на модульный оптимум. Требуется рассчитать
величины настроечных резисторов R
oc
, R
вх
, R
occ
, R
вхс
и емкости С
ос
.
Исходные данные. Двигатель постоянного тока с независимым возбуж-
дением имеет мощность Р
н
=18 кВт. U
ян
=440 В, I
ян
=41,4 А, ω
н
=104,5 1/с, С=4,16
в.c., R
яц
=0,45 Ома, L
яц
=0,01 Гн, J
Σ
=0,9 кг.м
2
, и
зс
=0-8 В, Т
μ
=0,0066 с, U
ТI
=48 В.
Решение.
1. Электромагнитная постоянная времени
с
R
L
Т
яц
яц
я
02,0
45,0
01,0
===
2. Электромеханическая постоянная времени
с
С
RJ
Т
яц
м
023,0
16,4
45,09,0
22
=
⋅
==
Σ
3. Передаточный коэффициент тиристорного преобразователя
55
8
440
.
===
максу
н
ТП
и
U
К
4. Коэффициент обратной связи по скорости
св
и
к
н
максзс
с
.077,0
5,104
8
.
==
ω
5. Коэффициент обратной связи по току
АВ
II
и
к
янмакс
максзТ
Т
/097,0
4,412
8
2
8
.
=
⋅
=
⋅
==
6. Принимаем ПИ-регулятор тока
рТ
КpW
ИТ
РТРТ
1
)( +=
с
R
ТкКа
Т
я
ТТТПМТ
ИТ
156,0
45,0
0066,0097,0552
=
⋅⋅⋅
==
μ
13,0
156,0
02,0
===
ИТ
я
РТ
Т
Т
К
7. Величину резисторов и емкости в регуляторе тока находим, полагая
мкФС
ос
2
=
кОм
С
Т
R
ос
ИТ
ос
78
102
156,0
6
=
⋅
==
−
кОм
К
R
R
РТ
ос
вх
600
13,0
1078
3
=
⋅
==
8. Принимаем П-регулятор скорости
1,10
0132,0077,045,02
023,016,4097,0
=
⋅⋅⋅
⋅⋅
==
сСямс
мТ
РС
ТкRа
СТк
К
μ
где Т
μС
= а
МТ
Т
μТ
= 2 · 0,0066=0,0132с.
9. Величина резисторов в регуляторе скорости
R
вх
= 10кОм,
R
ос
= К
РС
R
вх
=10,1·10·10
3
=101кОм.
Если электропривод должен иметь большой диапазон регулирования
скорости или требуется высокая точность поддержания заданной скорости, то
используется ПИ-регулятор скорости. В этом случае контур тока настраивается
на симметричный оптимум.
Передаточная функция регулятора скорости, настроенного на симмет-
ричный оптимум, будет
рТ
КpW
ИС
РСРССО
1
)( +=
(10.16)
где
мТ
ССсс
ИС
Тк
СкТа
Т
β
μ
2
=
;
ИС
С
РС
Т
Т
К
μ
4
=
; а
сс
= 8
Передаточная функция замкнутого контура скорости будет в этом слу-
чае
1
14
1
)(
2233
+++
+
⋅=
рТарТарТа
рТ
к
рW
СмсСмсСмс
С
с
КССО
μμμ
μ
(10.17)
При подаче на вход системы ступенчатого управляющего сигнала и
зс
С
зс
уст
к
и
=
ω
Переходный процесс в этом случае характеризуется следующими пока-
зателями качества:
Спп
Тt
μ
5,16
=
;
Сн
Тt
μ
1,3
=
; %43
=
σ
.
Одним из главных достоинств настройки на симметричный оптимум
является то, что система регулирования будет астатической по возмущению по
нагрузке М
с
, т.е. при приложении нагрузки установившееся значение скорости
останется неизменным, равным заданному, а статическая ошибка ∆ω
с
= 0.
Для того, чтобы уменьшить колебательность переходного процесса на
вход регулятора скорости включают фильтр с передаточной функцией аперио-
дического звена
14
1
)(
+
=
рТ
pW
С
ф
μ
.
Тогда передаточная функция системы по сигналу задания будет
1
11
)(
2233
.
+++
⋅=
рТарТарТа
к
pW
СмсСмсСмс
С
СОФКС
μμμ
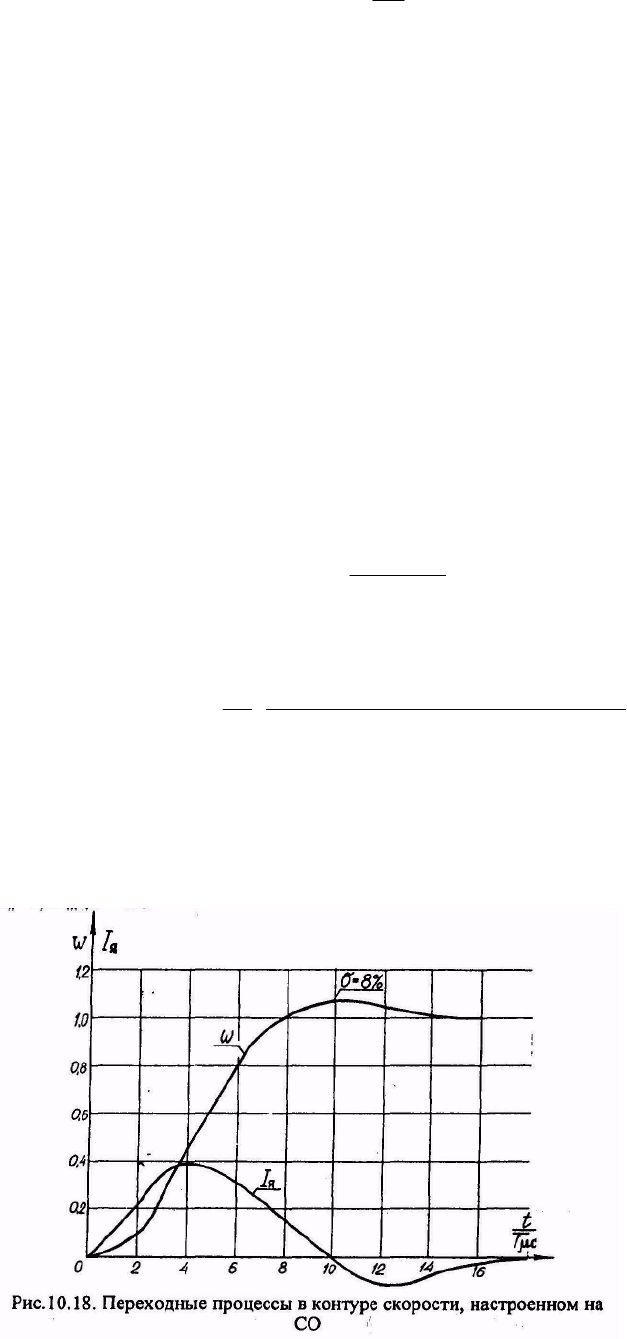
Переходный процесс при настройке на симметричный оптимум с
фильтром на входе будет иметь вид, показанный на рис. 10.18 со следующими
показателями качества t
пп
= 13,3Т
μС
; t
н
=7,6Т
μС
; σ = 8%.
Включение фильтра не вносит изменения в процесс отработки возму-
щающего воздействия по М
с
; установившаяся ошибка по скорости будет равна
нулю.
Системы регулирования положения строятся как трехконтурные, где
внешний контур положения управляет контуром скорости.
10.7. Типовые системы управления асинхронными частотно-
регулируемыми электроприводами
Асинхронные регулируемые электроприводы переменного тока обычно
строятся на базе асинхронных двигателей с коротко-замкнутым ротором с час-
тотным управлением. При этом в
качестве источников питания применяются
полупроводниковые преобразователи частоты, работающие в режиме источни-
ка напряжения (ПЧН) или источника тока (ПЧТ).
Целесообразный способ управления двигателем зависит от технических
требований к системе электропривода. В электроприводах с ограниченным
диапазоном регулирования и отсутствием динамических режимов работы при-
меняется частотно-параметрический способ, при котором регулируется частота
и действующее
значение выходного напряжения ПЧН в соответствии с задан-
ной скоростью.
В электроприводах с диапазоном регулирования до 100, к которым
предъявляются высокие требования к динамическим режимам, применяется
частотно-токовый способ, при котором регулируется частота и действующее
значение выходного тока ПЧТ в зависимости от абсолютного скольжения дви-
гателя при заданной скорости и действующей
нагрузке.
В электроприводах с большим диапазоном регулирования скорости и
высокими требованиями к динамическим характеристикам применяется регу-
лирование мгновенных значений трехфазной системы питающих напряжений и
токов с использованием векторного принципа регулирования.
Наиболее простыми системами частотного регулирования являются
частотно-параметрические системы. Такие системы обеспечивают диапазон ре-
гулирования скорости до D=20:l при статизме S
мс
=5-10%. Обычно это разомк-
нутые по скорости системы частотного регулирования, у которых желаемое се-
мейство механических характеристик асинхронного двигателя получается за
счет формирования регулировочной характеристики преобразователя частоты -
отношения величины напряжения, питающего двигатель, к частоте U
ПЧ
/f
ПЧ
.
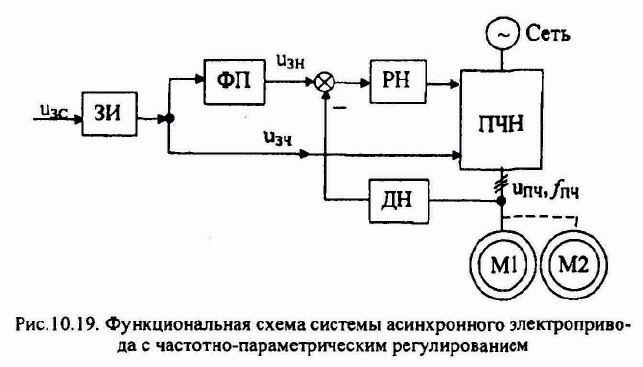
Функциональная схема такой системы электропривода приведена на
рис. 10.19. Частота f
ПЧ
определяется величиной задаваемой скорости ω
3
. Канал
регулирования частоты преобразователя выполняется с линейной регулировоч-
ной характеристикой f
ПЧ
(и
зс
)- В канал регулирования напряжения включается
функциональный преобразователь ФП, который обеспечивает требуемое соот-
ношение между частотой и напряжением. При этом желательно предусмотреть
отрицательную обратную связь по выходному напряжению U
ПЧ
, чтобы преоб-
разователь частоты обладал свойством источника напряжения. Это позволяет
достаточно точно выполнять требуемое соотношение между частотой и на-
пряжением. Наиболее часто встречающиеся соотношения рассмотрены в разде-
ле 6.2.
Электроприводы с частотно-параметрическим регулированием скоро-
сти примечаются в технологических установках, работающих в продолжитель-
ном режиме с относительно медленным изменением скорости. Наиболее часто
они применяются для регулируемого привода насосов и вентиляторов. Такие
системы целесообразно также применять, если по технологии требуется од-
новременное регулирование скорости группы однотипных электроприводов. В
этом случае преобразователь частоты является общим источником питания для
группы приводов.
Асинхронные электроприводы с диапазоном регулирования скорости до
D= 100:1 и высокими требованиями к динамике, когда осуществляются частые
пуски, торможения и реверсы, выполняются как системы с частотно-токовым
управлением. В таких системах преобразователь частоты работает в режиме
источника тока. Это достигается применением
преобразователей частоты типа
ПЧТ или преобразователей частоты типа ПЧН, которые охватываются отрица-
тельной обратной связью по току. Система регулирования осуществляет зада-
ние частоты и величины тока статора в соответствии с заданной скоростью и
нагрузкой на валу двигателя.
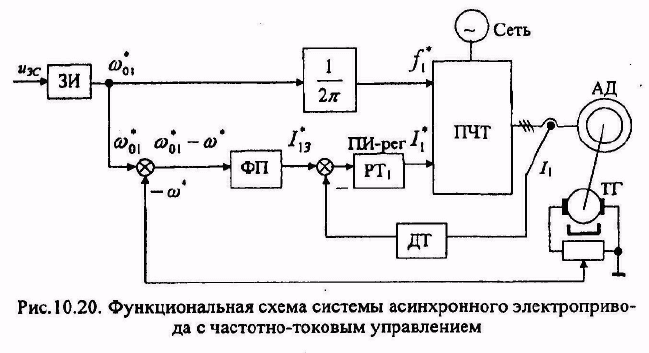
Функциональная схема асинхронного электропривода с частотно-
токовым управлением приведена на рис. 10.20. Система регулирования двухка
-
нальная: содержит канал частоты и канал тока статора. Выходная частота пре-
образователя ПЧТ задается пропорционально заданной скорости. Ток статора
задается в зависимости от величины рассогласования заданной и действитель-
ной скоростей
абс
S
=
−
ω
ω
01
,
которое равно абсолютному скольжению. Величине абсолютного
скольжения примерно пропорционален ток ротора
'
2
I . Приведенный к статору
он определяет активную составляющую тока I
1
. Реактивная составляющая,
пропорциональная току намагничивания I
0
поддерживается постоянной (см.
рис.3.6).Таким образом, задание на ток статора будет
(
)
[
]
2
0
2
011
2
0
2'
213
IКIII +−=+=
ωω
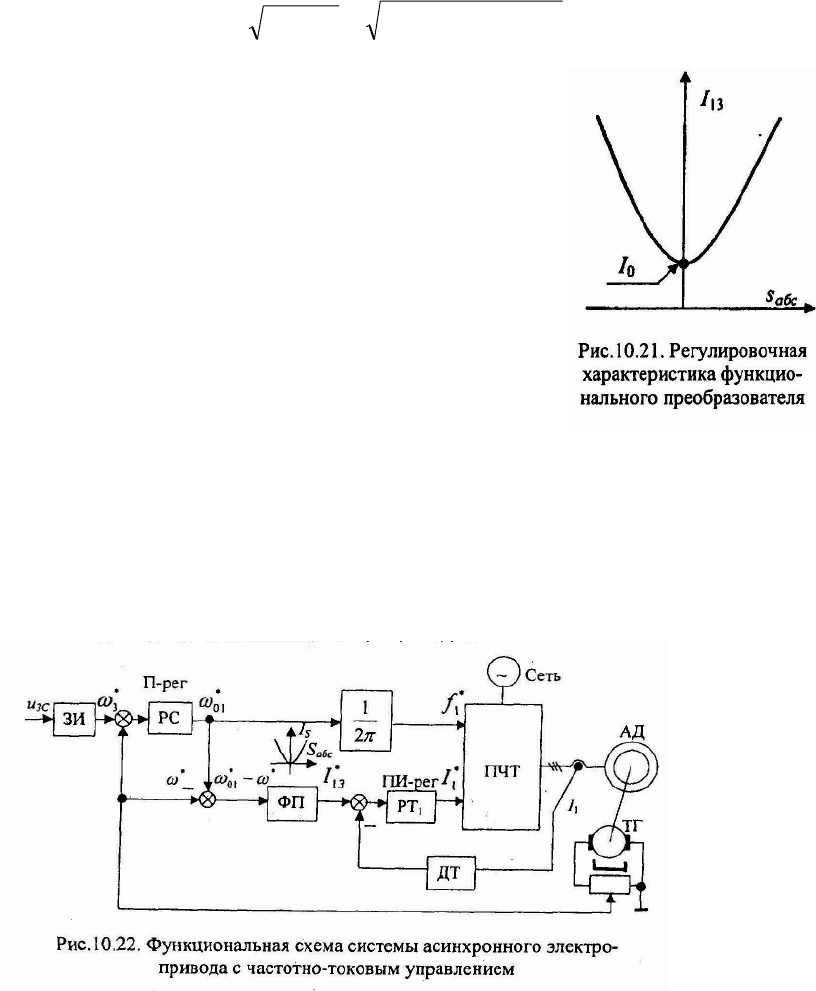
Это выражение для задания тока формируется
функциональным преобразователем ФП, характеристика
которого дана на рис. 10.21. Для повышения быстродейст-
вия контур тока настраивается на модульный оптимум, для
чего предусмотрен регулятор тока РТ и обратная связь по
току статора с датчиком тока ДТ. Измерение скорости
производится тахогенератором.
Жесткость механических характеристик в системе
электропривода
по схеме рис. 10.20 близка к жесткости естественной механиче-
ской характеристики асинхронного двигателя.
Поэтому достижимый диапазон регулирования скорости в этой системе
может составить примерно D=20:1.
При необходимости получения большого диапазона регулирования сле-
дует внести в систему замкнутый контур регулирования скорости, как это пока-
зано на функциональной схеме рис. 10.22. Данная система управления является
двухканальной
и содержит контур скорости и контур тока, которые настраива-
ются на модульный оптимум. На выходе регулятора скорости формируется
сигнал, пропорциональный частоте питания f
1
и скорости вращения поля стато-
ра. Вычитая из этого сигнала значение действительной скорости ω
*
, формиру-
ется сигнал, пропорциональный абсолютному скольжению, который подается
на вход ФП. Функциональный преобразователь в соответствии с зависимостью,
указанной на рис. 10.21, вырабатывает сигнал задания тока статора, который
подается на вход контура тока, имеющего ПИ-регулятор. Частотно-токовое
управление может применяться только для однодвигательных электроприво-
дов.
Наиболее высокие динамические характеристика и диапазон
регулиро-
вания скорости до 10000 могут быть получены при векторном управлении
асинхронным двигателем. Принцип векторного управления состоит в опреде-
лении и принудительном установлении мгновенных значений токов в обмотках
двигателя таким образом, чтобы обобщенные векторы токов и потокосцепле-
ний занимали в пространстве положение, обеспечивающее создание электро-
магнитного момента нужной величины.
Обобщенным вектором тока
(потокосцепления) называется пространст-
венный вектор, образованный токами во всех обмотках статора или ротора дви-
гателя. Векторная диаграмма асинхронной машины показана на рис. 10.23.
Электромагнитный момент, создаваемый двигателем, равен
)(sin)(
21
ttfкFFкМ
ммм
λ
=×=
,
где
1
F
,
2
F
- пространственные векторы токов или потокосцеплений
статора и ротора; f
м
(t)= |F
1
| x |F
2
| ;
λ(t) - пространственный угол между векторами
1
F
и
2
F
.
Очевидно, что минимальные значения токов а, следовательно, потерь в
обмотках машины будет, если векторы
1
F и
2
F перпендикулярны. В системах
векторного управления нет необходимости определять абсолютное пространст-
венное положение обоих векторов
1
F и
2
F . Важно определять положение одно-
го вектора относительно другого. Поэтому один из векторов принимается за ба-
зовый, а положение другого контролируется углом λ(t).
С этой целью используют не обычные неподвижные пространственные
координаты, связанные с конструкцией электрической машины, например со