Ніколаєнко А.М. Методичні вказівки до лабораторного практикуму
Подождите немного. Документ загружается.

21
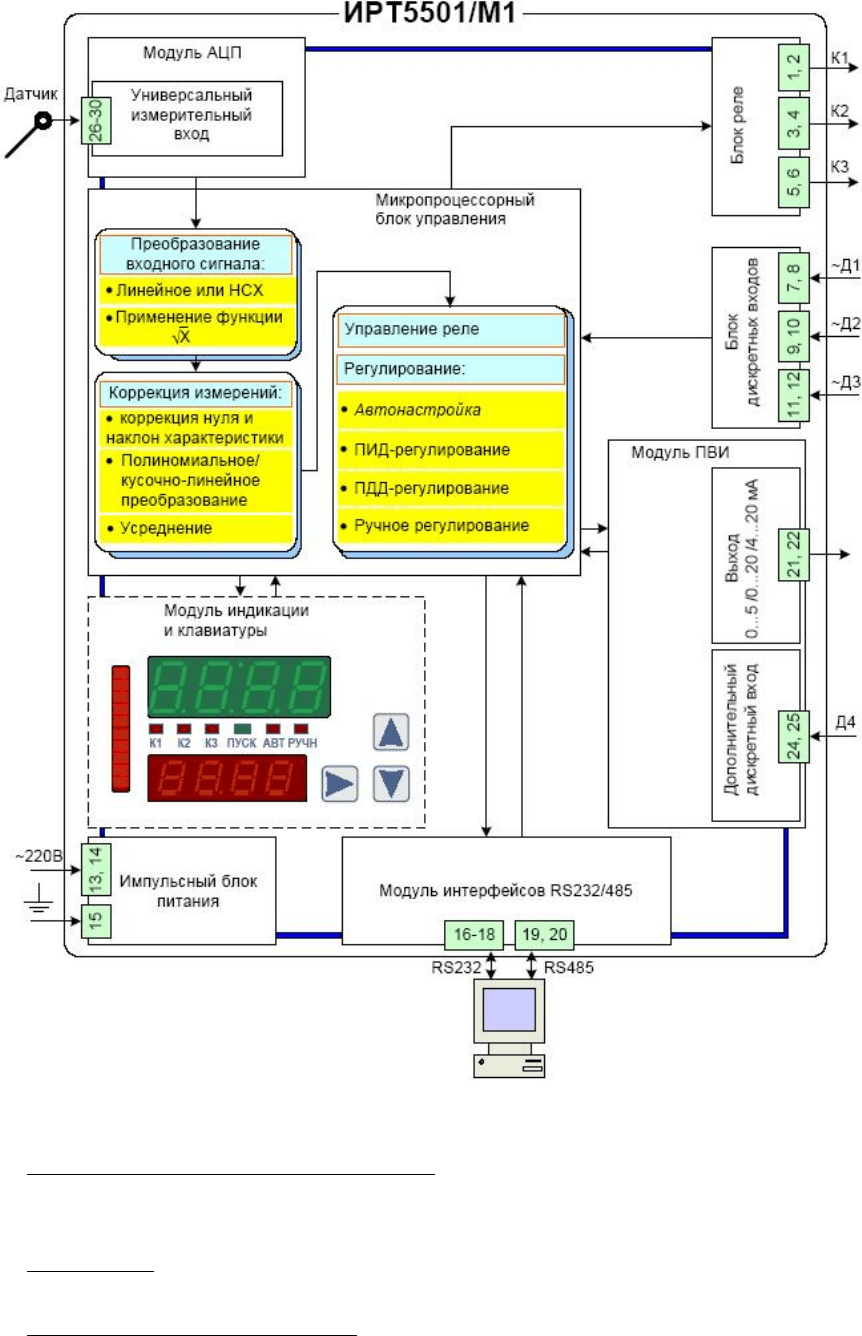
Рис.2.2 Функціональна схема ИРТ 5501/М1
Модуль інтерфейсів RS 232/485 призначений для зв'язку з комп'ютером і
забезпечення двостороннього обміну даними із зовнішніми пристроями через
стандартні інтерфейси RS 232 або RS 485.
Блок реле містить три виконавчі реле («К1», «К2», «К3») і призначений для
управління зовнішніми виконавчими пристроями, підключеними до приладу.
Блок дискретних входів містить три дискретні входи («~Д1», «~Д2»,
«~Д3»), що спрацьовують при підключенні до них напруги ~220В і призначених
для дистанційного керування приладом при реалізації процесів ПІД/ПДД і
ручного регулювання.

22
Мікропроцесорний блок управління містить мікроконтролер, ПЗП з
програмним забезпеченням, незалежний пристрій, що запам'ятовує, і виконує
наступні функції:
• перетворення цифрового коду у відповідне значення вимірюваної
величини;
• аналіз результату поточного вимірювання в режимі реального часу;
• управління процесами взаємодії між модулями ИРТ;
• управління станом реле за результатами вимірів;
• виведення поточного значення вимірюваної величини або значень уставок
на індикатори;
• опитування клавіатури;
• управління модулем інтерфейсів RS 232/485;
• реалізація процесів ПІД/ПДД/ручного регулювання.
Робота ИРТ відбувається в циклічному режимі з періодом 0,5 сек. За один
цикл роботи ИРТ здійснює один вимір сигналів в аналоговому і чотирьох
дискретних вхідних каналах. Отримані результати аналізуються
мікропроцесорним блоком управління і залежно від внутрішніх настройок
приладу і поточного режиму:
• результат виконаного виміру відображається на основному індикаторі
приладу;
• для кожного з трьох реле може бути сформована команда на його
вмикання/вимикання, яка може бути виконана відразу, із затримкою на декілька
циклів або відмінена;
• може бути сформована команда на запуск/зупинку процесу регулювання;
• при запущеному процесі регулювання виробляється керувальний сигнал,
який поступає на один або два релейні виходи;
• на виході ПВІ формується сигнал, що відповідає поточному значенню
виміряної величини (або вихідній потужності) в одному з діапазонів 0…5 мА,
0…20 мА або 4…20 мА.
На початку кожного циклу вимірювання вхідний сигнал від первинного
перетворювача поступає на універсальний вимірювальний вхід і перетворюється
модулем АЦП в цифровий код, який поступає в мікропроцесорний блок
управління для подальшої обробки, відповідно до конфігурації приладу.
Подальша обробка цифрового коду залежить від значень відповідних
параметрів, встановлених користувачем, і може включати наступні етапи:
• перетворення цифрового коду відповідно до характеристики первинного
перетворювача;
• корекція нуля і/або нахил характеристики для усунення початкової
похибки перетворення вхідних сигналів;
• поліноміальне або кусково-лінійне перетворення в разі вживання
нестандартних первинних перетворювачів;
• усереднювання для згладжування коливань у показаннях приладу за
наявності підвищеного рівня шумів, що поступають на вимірювальний вхід.
Результатом всіх етапів обробки є виміряне значення Aизм фізичної
величини. На основному індикаторі приладу висвічується значення величини
23
Aизм, яке визначене розрядністю індикатора і встановленим значенням параметра
«PRCS».
ИРТ має три незалежних уставки, які можуть бути граничними
параметрами при спрацьовуванні вихідних реле. Команди на вмикання/вимикання
реле формуються відповідно до встановлених користувачем, при конфігуруванні
приладу, значень відповідних параметрів «rL1.1» (Зв'язок реле 1 («К1») з
уставками і помилкою вимірювань в каналі), «rL2.1» (Зв'язок реле 2 («К2») з
уставками і помилкою вимірювань в каналі) і «rL3.1» (Зв'язок реле 3 («К3») з
уставками і помилкою вимірювань в каналі).
При виконанні одного з процесів автонастроювання або ПІД-/ПДД-/ручного
регулювання останній отримує повний контроль над всіма реле вказаними
користувачем в параметрах «rGd» (Вибір реле, призначених для закриття клапана
(ПДД-регулювання)) і «rGi» (Вибір реле, призначених для управління
виконавчим пристроєм (ПІД-регулювання) або для відкриття клапана (ПДД-
регулювання)), при цьому управління цими реле, яке визначене параметрами
«rL1.1», «rL2.1» і «rL3.1», припиняється.
У процесах ПІД-/ПДД-регулювання виміряне значення Aизм порівнюється
з уставкой процесу регулювання і обчислюється величина сигналу управління
об'єктом регулювання. Сигнал управління перетворюється алгоритмом ШІМ-
модуляції в послідовність імпульсів певній тривалості. Імпульси подаються на
один (ПІД-/ручноє регулювання) або два (ПДД-регулирование) з трьох релейних
виходів «К1», «К2», «К3», які використовуються для управління роботою
виконавчого механізму.
При ручному регулюванні величина керувального впливу задається
користувачем за допомогою дискретних входів. Перемикання з ручного
управління на ПІД-регулювання і назад може здійснюватися користувачем через
один з дискретних входів.
Користувачеві надається також можливість здійснювати реєстрацію
виміряних значень і/або управління виконавчими пристроями за допомогою
виходу ПВІ, який може бути налаштований як на перетворення дійсних значень
виміряної величини, так і на перетворення значень поточної вихідної потужності.
Основні режими роботи ИРТ
ИРТ може знаходитися в одному з наступних режимів:
• режим індикації вимірів;
• режим введення паролів;
• режим меню;
• режим перегляду значень уставок і вихідної потужності.
Незалежно від поточного режиму ИРТ виконує наступні функції:
• вимірювання вхідного значення сигналу;
• перетворення виміряного значення у відповідну фізичну величину;
• формування вихідного уніфікованого сигналу постійного струму: 0...5, 0...20 або
4...20 мА;
• контроль значень виміряної величини і станів 4-х дискретних входів в режимі
реального часу;
24
• управління станом кожного з 3-х реле відповідно до встановлених користувачем
зв'язків реле з уставками і помилкою вимірів в каналі.
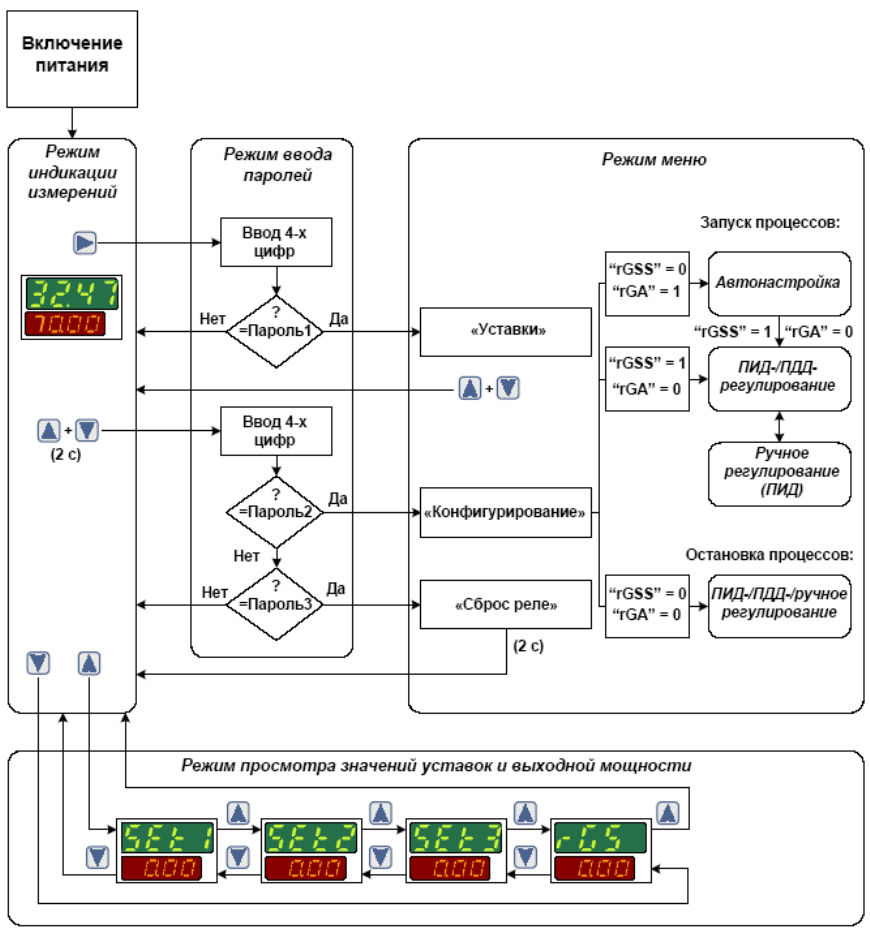
Схема взаємозв'язків між режимами ИРТ 5501/М1 приведена на рис.2.3
Рис.2.3 Схема взаємозв'язків між режимами ИРТ 5501/М1
Режим індикації вимірів
У режим індикації вимірів прилад переходить після включення живлення.
На основному індикаторі відображається поточне значення виміряної величини,
на додатковому – встановлене значення уставки процесу регулювання. У даному
режимі прилад може знаходитися не залежно від того, виконується чи ні який -
небудь з процесів автонастроювання, ПІД-/ПДД-/ручного регулювання.
Режим введення паролів
Всі внутрішні настроювання приладу можуть бути виконані в режимі меню,
доступ в який захищений трьома паролями: пароль 1, пароль 2, пароль 3.
Кожен з трьох паролів вводиться в режимі введення паролів і захищає
доступ до певної групи параметрів:
25
• пароль 1 – доступ до зміни значень уставок і гістерезисів (розділ «Уставки»);
• пароль 2 – доступ до зміни конфігураційних параметрів (розділ
«Конфігурація»);
• пароль 3 – доступ до спеціальної функції приладу – «Скидання реле».
Вхід в режим введення паролів з режиму індикації вимірів відбувається при
натисненні кнопки «►» (введення пароля 1) або при одночасному натисненні
кнопок «▲» і «▼» з утримуванням протягом 2 секунд (введення пароля 2 або
пароля 3).
При вході в режим введення паролів на основному індикаторі висвічується
«PASS», на додатковому індикаторі – комбінація чотирьох цифр «0000», з
миготливою першою цифрою. Користувачеві надається можливість ввести
чотиризначний шістнадцятковий код за допомогою кнопок управління ▲,▼,►.
Режим меню
У режимі меню здійснюються настроювання, що визначають роботу ИРТ.
Всі зміни значень параметрів запам'ятовуються в незалежній пам'яті приладу і
набирають чинності після закінчення їх редагування.
Вхід в режим меню можливий тільки з режиму індикації вимірів через
режим введення паролів після введення пароля 1, пароля 2 або пароля 3, що
забезпечують доступ до розділів «Уставки», «Конфігурація» або «Скидання реле»
відповідно.
У даному режимі користувач має можливості:
• встановлювати значення уставок і гістерезисів;
• встановлювати значення параметрів зв'язку з комп'ютером;
• встановлювати значення параметрів спрацьовування реле;
• встановлювати зв'язки уставок і реле;
• конфігурувати дискретні входи;
• встановлювати тип первинного перетворювача;
• встановлювати значення параметрів обробки вхідного сигналу;
• встановлювати значення параметрів перетворення виміряного значення;
• запускати процес автонанастроювання;
• встановлювати значення параметрів регулювання;
• запускати/зупиняти процеси ПІД-/ПДД-/ручного регулювання;
• встановлювати значення параметрів вихідного каналу;
• здійснювати скидання реле.
Вихід з режиму меню здійснюється одночасним натисненням кнопок «▲» і
«▼», прилад при цьому переходить в режим індикації вимірів.
Режим перегляду значень уставок і вихідної потужності
У даному режимі користувач має можливість оперативно переглянути
встановлені значення всіх трьох уставок (параметри «SEt1» (Уставка 1), «SEt2»
(Уставка 2), «SEt3» (Уставка 3)) і поточне значення вихідної потужності
(параметр «rGS»).
Вхід в режим перегляду значень уставок і вихідної потужності здійснюється
з режиму індикації вимірів натисненням однієї з кнопок «▲» або «▼».
Натиснення кнопки «▲» в режимі індикації вимірів призводить до появи на
основному індикаторі назви параметра «SEt1», а на додатковому індикаторі –
26
його встановленого значення. Подальші натискання кнопки «▲» дозволяють
переглянути значення параметрів і вийти в режим індикації вимірів в
послідовності: «SEt1» –> «SEt2» –> «SEt3» –> «rGS» –> режим індикації вимірів.
Натискання кнопки «▼» в режимі індикації вимірів призводить до появи на
основному індикаторі назви параметра «rGS», а на додатковому індикаторі – його
встановленого значення. Подальші натискання кнопки «▼» дозволяють
переглянути значення параметрів і вийти в режим індикації вимірів в
послідовності: «rGS» –> «SEt3» –> «SEt2» –> «SEt1» –> режим індикації вимірів.
Незалежно від поточного режиму ИРТ може також виконувати один з
наступних процесів, що пов'язані з регулюванням і запускаються користувачем в
режимі меню:
• процес автонастроювання;
• процес ПІД-регулювання;
• процес ПДД-регулювання;
• процес ручного регулювання.
Принципи регулювання
Передбачається, що регулювання здійснюється за допомогою виконавчих
пристроїв одного з трьох типів:
• нагрівач/холодильник (ПІД-/ручне регулювання);
• клапан/заслінка з керованим уніфікованим струмовим сигналом (ПІД-/ручне
регулювання);
• клапан/заслінка з керованим імпульсним сигналом (ПДД-регулювання).
ПІД-регулювання
Алгоритм ПІД-регулювання забезпечує підтримку температури заданої
уставкою Aуст.
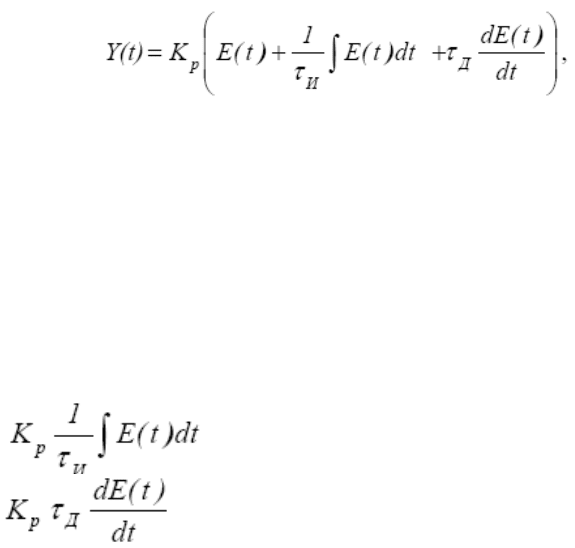
В процесі ПІД-регулювання на виході приладу формується сигнал Y(t), дія
якого направлена на зменшення відхилення E(t) поточного значення Aизм
вимірюваної величини від встановленого значення Aуст:
(1)
де t– поточне значення часу;
Е(t) – різниця між заданим Aуст і поточним Aизм значеннями вимірюваної
величини;
Kp– коефіцієнт пропорційності, %/од.вим;
τ Д – постійна часу диференціювання, с;
τ І – постійна часу інтегрування, с;
Kp Е(t) – пропорційна складова;
– інтегральна складова;
– диференційна складова.
27
Величина Aуст задається параметром «rGSt» (Уставка процесса
регулювания).
Коефіцієнти регулювання Kp, τД, τІ користувач може встановити самостійно,
вводячи значення параметрів «rGPr» (Коефіцієнт пропорційності), «rGti» (Час
інтегрування), «rGtd» (Час диференціювання) в режимі меню або вони
встановлюються автоматично в результаті запуску користувачем процесу ПІД-
регулювання з попереднім автонастроюванням.
При регулюванні користувач вибирає один з методів управління об'єктом:
пряме або зворотне.
При прямому управлінні значення вихідного сигналу Y(t) збільшується із
збільшенням значення вимірюваної величини (холодильник). При зворотному
управлінні значення вихідного сигналу зменшується із збільшенням значення
вимірюваної величини (нагрівач).
Вибір методу управління визначається значенням параметра «rGHC» Тип
об'єкту регулювання (нагрів/охолодження).
Широтно-імпульсна модуляція (ШІМ)
ШІМ-модуляція використовується в процесах ПІД-/ПДД-/ручного
регулювання, а також в процесі автонастроювання для формування сигналів, що
управляють, відповідно до формули (1) або (2). Алгоритм ШІМ-модуляції
перетворює сигнал управління в послідовність імпульсів із заданим періодом
Tшим, які поступають на один з релейних виходів, визначених параметром «rGi»
(Вибір реле, призначених для управління виконавчим пристроєм (ПІД-
регулювання) або для відкриття клапана (ПДД- регулювання)).
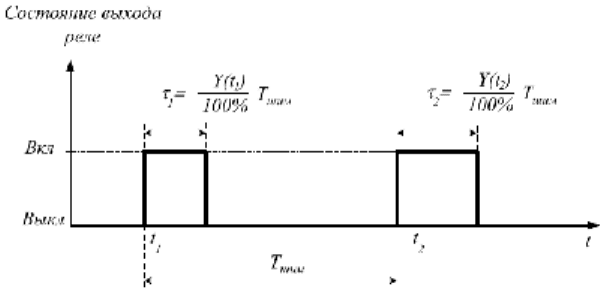
Тривалість імпульсів 1, 2. пропорційна значенню сигналу управління,
рис.2.4.
Рис.2.4 Послідовність імпульсів при широтно-імпульсній модуляції
сигналу управління
З метою виключення короткочасних спрацьовувань виконавчого механізму
передбачено обмеження мінімальної тривалості імпульсу величиною τmin. Для
обліку імпульсів з тривалістю, меншою τmin, застосовується алгоритм
накопичення:
• перший імпульс з тривалістю меншої τmin не формується;
28
• тривалість наступного за ним імпульсу збільшується на тривалість
попереднього, якщо сумарна тривалість виявляється менше τmin, то не формується
і цей імпульс;
• імпульси не формуються до тих пір, поки їх спільна тривалість не опиниться
більше τmin.
Використання алгоритму накопичення обмежує мінімальну тривалість
імпульсів величиною τmin, зберігаючи необхідний середній рівень сигналу
управління.
Період ШІМ-послідовності Tшим і мінімальна тривалість імпульсу τmin
задаються при підготовці приладу до роботи відповідно до характеристик
виконавчого пристрою і властивостей об'єкту регулювання..
Величини Tшим і τmin визначаються користувачем параметрами «rGPd»
(період ШІМ-сигналу), «rGtL» (Мінімальний час між перемиканнями реле, с),
відповідно.
Порядок роботи при запуску/зупинці процесу ПІД-регулювання з
автонастроюванням
Розглядуються два типи виконавчих пристроїв: нагрівач – холодильник і
нагрівальний елемент печі з сигналом керування 0…5 мА.
Для здійснення за допомогою ИРТ процесу ПІД-регулювання з попереднім
автоматичним визначенням коефіцієнтів регулювання (автонастроювання),
необхідно провести установку значень всіх параметрів, що відносяться до
процесу регулювання (окрім «rGPr», «rGti», «rGtd»). Всі установки параметрів
здійснюються в режимі меню.
При визначенні коефіцієнтів регулювання за допомогою процесу
автонастроювання рекомендується, щоб вимірювана величина об'єкту
регулювання у момент старту автонастроювання знаходилася в стаціонарному
стані. В разі використання нагрівача з керувальним сигналом 0…5 мА
рекомендується щоб він був охолоджений.
Для запуску процесу ПІД-регулювання з автонастроюванням необхідно:
• увімкнути живлення приладу;
• увійти до режиму меню розділ «Конфігурація», пароль 2;
• провести установлення необхідних значень всіх параметрів даного розділу
меню, окрім коефіцієнтів регулювання «rGPr», «rGti», «rGtd»;
• встановити: «rGtP»= 0 (Режим управления нагрузкой (ПІД/ПДД)), «rGA» =
0 (Запуск /зупинення процесу автонастроювання), «rGSS» = 0 (Запуск /зупинення
процесу регулювания);
• вийти з режиму меню, натиснувши одночасно кнопки «▲» і «▼»;
• вимкнути живлення приладу;
• увімкнути живлення приладу;
• увійти до режиму меню розділ «Конфігурація», пароль 2;
• в разі нагрівача-холодильника встановити: «rGi» = « – 1» (Зв'язок реле 1 з
виконавчим пристроєм); в разі електронагрівача з входом 0…5 мА встановити:
«SrO1» = «rGS1» (Управляючий вихідний сигнал процесу регулювання), «OtP1»
29
= «0-5» (Діапазон уніфікованого вихідного сигналу каналу ПВІ), «OdL1» = 0
(Нижня межа діапазону перетворення ПВІ), «OdH1» = 100 (Верхня межа
діапазону перетворення ПВІ) , «OEr1» = 3.5 (Струм помилки для каналу ПВІ,
мА);
• встановити: «rGA» = 1 (запуск процесу автонастроювання);
• вийти з режиму меню, натиснувши одночасно кнопки «▲» і «▼»;
• переконатися, що індикатор «АВТ» на лицевій панелі світиться (запущений
процес автонастроювання).
При успішному завершенні процесу автонастроювання обчислені значення
коефіцієнтів регулювання встановлюються автоматично, і прилад переходить до
виконання процесу ПІД-регулювання (параметр «rGSS»=1), при цьому на лицевій
панелі приладу засвічується індикатор «ПУСК», а індикатор «АВТ» гасне.
В разі невдалого завершення процесу автонастроювання процес ПІД-
регулювання не запускається, індикатор «АВТ» гасне, значення коефіцієнтів
регулювання «rGPr», «rGti», «rGtd» залишаються без зміни.
ПІД-регулювання без автонастроювання
Цей режим досліджується при виконанні лабораторної роботи, тому
послідовність дій наведена у розділі «Виконання лабораторної роботи».
Спільні принципи ПДД-регулювання
При ПДД-регулюванні неузгодження E(t)= Aизм –Aуст обробляється і на
виході приладу з’являється керувальний сигнал Z(t):
(2)
Значення коефіцієнтів регулювання Kp, τД і τІ для ПДД-регулювання
вводяться користувачем встановленням відповідних значень параметрів «rGPr»,
«rGti», «rGtd» в режимі меню, або визначаються автоматично в результаті
виконання процесу автонастроювання.
На основі вихідного сигналу Z(t) регулятора формується сигнал управління
інтегруючим механізмом, який є величиною зміни дії на об'єкт регулювання.
ШІМ-модуляція при ПДД-регулюванні
ШІМ-модуляція використовується для формування на виході реле керівних
сигналів відповідно до формули (2). Алгоритм ШІМ-модуляції перетворює сигнал
управління в послідовності імпульсів із заданим періодом Tшим. Тривалість
імпульсів τ1, τ2. пропорційна значенню сигналу управління у момент початку
періоду ШІМ.
Алгоритми ШІМ-модуляції при ПДД- і ПІД-регулюванні збігаються, якщо
керувальний сигнал, з позитивним знаком. ШІМ-послідовність імпульсів
формується за одним і тим же законом і поступає на один з релейних виходів
приладу, призначеному для впливу на об'єкт регулювання у бік «збільшення»
(наприклад, відкриття клапана/заслінки).
Негативне значення керувального сигналу при ПІД-регулюванні
неможливе, а при ПДД-регулюванні ШІМ-послідовність імпульсів формується
30
так само, як і в разі позитивного за знаком керувального сигналу, але ШІМ-
послідовність імпульсів в цьому випадку поступає на іншій з релейних виходів,
призначеному для дії на об'єкт регулювання у бік «зменшення» (наприклад,
закриття клапана/заслінки).
Конфігурування приладу
Перегляд і редагування значень параметрів, що визначають роботу приладу,
здійснюється в режимі меню. Змінене значення параметра зберігається в
незалежній пам'яті приладу і вступає в дію відразу після закінчення редагування.
При вході в режим меню процеси вимірювання в каналах не припиняються
так само, як і процеси автонастроювання і регулювання (якщо вони вже були
запущені).
Структура меню
Меню ИРТ складається з наступних розділів:
• розділ «Уставки»;
• розділ «Конфігурування»;
• розділ «Скидання реле».
Перші два розділи містять параметри приладу, третій розділ призначений
для виконання спеціальної функції – скидання реле.
Вхід в режим меню, перегляд і редагування значень параметрів, а також
вихід з режиму меню здійснюються за допомогою кнопок «►», «▲» і «▼»,
розташованих на лицевій панелі приладу.
Кнопки «▲» і «▼» використовуються для:
• вибору потрібної назви параметра зі списку всіх параметрів розділу;
• вибору потрібного значення параметра зі списку;
• вибору потрібного значення для кожного з розрядів параметра;
• виходу з режиму меню в режим індикації вимірів.
Кнопка «►» використовується для:
• початку редагування вибраного параметра (при цьому все слово або 1-й
розряд індикатора починають блимати);
• переходу до редагування наступного розряду (при цьому редагований розряд
починає блимати, а попередній – припиняє);
• закінчення редагування значення параметра (при цьому всі розряди
перестають блимати, і вибране значення параметра набирає чинності).
Для виходу з режиму меню в режим індикації вимірів, необхідно:
• натиснути одночасно кнопки «▲» і «▼».
Виконання лабораторної роботи
1. Ознайомитися з лабораторною установкою, теоретичними відомостями
про ИРТ5501/М1, зрозуміти його фізичну структуру, основні принципи роботи, а
також методику роботи з регулятором.
2. Увімкнути напругу живлення лабораторної установки (здійснює викладач)
і вторинний прилад РП-160.
3. Провести конфігурування регулятора. Всі параметри, що
використовуються при конфігуруванні умовно поділені на 7 груп: «Параметри