Мироновский Л.А. Моделирование линейных систем Учебное пособие
Подождите немного. Документ загружается.

181
можным, если указки одинаковы. но если указки разной длины,
задача их удержания на ладони в принципе разрешима!
Упражнение 3. Проанализировать управляемость пары обыч-
ных маятников. Показать, что ответ полностью аналогичен: си-
стема управляема, если маятники разной длины.
Упражнение 4. Проанализировать управляемость системы из
n перевернутых маятников. Показать, что система управляема,
если все маятники разной длины.
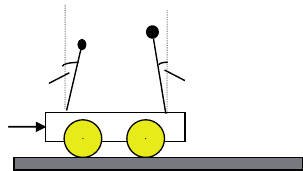
рассмотрим усложненный вариант предыдущей задачи, ког-
да необходимо учитывать массу основания. Пусть теперь речь
идет об управлении массивной тележкой с двумя перевернутыми
маятниками на платформе (рис. 6.14). динамика объекта описы-
вается системой линейных дифференциальных уравнений с ма-
трицами
12
1 1 21
12 2 2
010000
00 0 0
00 0 1 0 0
0 01 0 0
000001
0 0 01 0
//
,
( / )/ /
/ ( / )/
mgM mgM
m Mgl mglM
mglM m Mgl
æö
÷
ç
÷
ç
÷
ç
÷
--
ç
÷
ç
÷
ç
÷
÷
ç
÷
ç
÷
ç
=
÷
ç
÷
ç
+
÷
ç
÷
ç
÷
ç
÷
÷
ç
÷
ç
÷
ç
÷
ç
÷
ç
+
èø
A
1
2
0
1
0
1
0
1
/
,
/
/
M
lM
lM
æö
÷
ç
÷
ç
÷
ç
÷
ç
÷
ç
÷
ç
÷
÷
ç
÷
ç
÷
ç
=
÷
ç
÷
ç
-
÷
ç
÷
ç
÷
ç
÷
÷
ç
÷
ç
÷
ç
÷
ç
÷
ç
-
èø
b
Рис. 6.14. Перевернутые маятники на тележке
V
M
N
N
M
A
A
182
где М, m
1
, m
2
– массы тележки и маятников; l
1
, l
2
– длины
маятников; g – ускорение свободного падения. вектор со-
стояния X включает в себя шесть составляющих: положение
и скорость тележки, угловые положения и угловые скорости
каждого маятника.
возможны две постановки задачи:
– стабилизация только маятников;
– стабилизация маятников и тележки.
оказывается, в обоих случаях система управляема, т. е. ста-
билизация возможна, если маятники имеют разную длину.
Упражнение 5. Проанализировать управляемость и наблю-
даемость этой системы для обоих вариантов постановки задачи.
заметим, что при первой постановке задачи уравнение тележки
удается исключить и понизить размерность задачи до четырех.
6.4. Анализ наблюдаемости
наблюдаемость характеризует возможность определения со-
стояния системы по наблюдениям за ее выходными сигналами.
рассмотрим линейную динамическую систему, заданную описа-
нием в пространстве состояний (6.4) при
0() :ut =
0
0, , () .y== =
X AX cX X X
(6.6)
о п ре д е л е н и е . система называется наблюдаемой, если,
измеряя выходной сигнал y(t) в течение конечного времени Т,
можно однозначно определить ее начальное состояние Х(0). если
хотя бы для одного
0
n
RÎX
это сделать невозможно, система на-
зывается ненаблюдаемой
заметим, что в этом определении можно заменить начальное
состояние Х(0) на конечное состояние Х(Т) = Х
f
. действительно,
если состояние Х(0) найдено, то состояние Х
f
можно рассчитать
по формуле
T
0
.
f
=
A
X eX
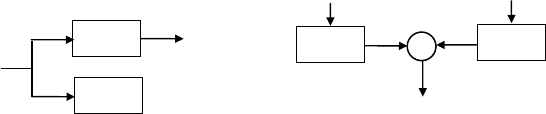
Рис. 6.15. Ненаблюдаемые структуры
4
4
V
Z
4
9
4
9
Z
б)
а)
183
Простые примеры ненаблюдаемых систем приведены на рис.
6.15, а, б.
в первом случае (рис. 6.15, а) часть переменных состояния не
влияет на выходной сигнал. во втором случае (рис. 6.15, б) мы
имеем две одинаковые подсистемы, и невозможно отличить их
вклад в выходной сигнал (наиболее показательна ситуация, ког-
да начальные условия одной из подсистем равны нулю).
Прямой способ анализа наблюдаемости сводится к получению
системы уравнений для определения неизвестных начальных
условий и проверке ее разрешимости.
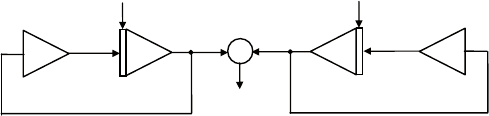
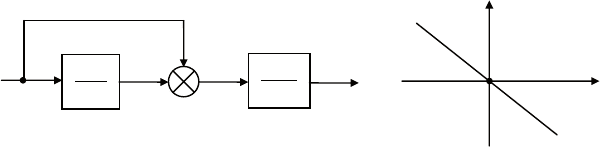
Пример 8. схема моделирования, приведенная на рис. 6.16,
содержит два интегратора, охваченных обратной связью, и сум-
матор для получения выходного сигнала
12
.yx x=+
L
L
C
B
Y
Y
Z
Рис. 6.16. Схема моделирования для примера 8
для анализа наблюдаемости используем выражения для сиг-
налов
12
, ,:xxy
1 2 12
12
, , () .
kt kt kt kt
x ae x be y t ae be= = =+
запишем последнее равенство для двух моментов времени,
например для t
1
= 0 и t
2
= 1:
12
01( ), ( ).
kk
a b y ae be y+= + =
Мы получили систему двух уравнений с двумя неизвестными
начальными условиями а и b:
12
11
0
1
()
.
()
kk
ay
by
ee
éù
éù é ù
êú
êú ê ú
=
êú
êú ê ú
êú
ëû ë û
ëû
она разрешима, если определитель системы не равен нулю
21
0.
kk
ee-¹
следовательно, при k
1
≠ k
2
схема наблюдаема, а при
k
1
= k
2
– нет.
Пример 9. Проанализируем наблюдаемость электрической
схемы, приведенной на рис. 6.17, при следующих значениях па-
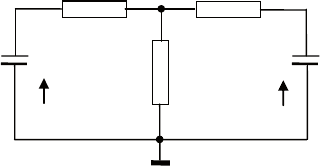
184
раметров: С = 1, r = 1, R = 2. в качестве переменных состояния
примем напряжения х
1
, х
2
на конденсаторах, измеряемый сиг-
нал – напряжение в точке у.
Процессы в электрической цепи описываются уравнениями:
( )
( )
11 22 1 1
2 2 12
1
, , /,
/ , /, / .
cc
c
x iz x iz i x y R
i x y R i i y r z pC
=× =× = -
= - += =
Подставляя сюда числовые значения параметров и выполняя
элементарные преобразования, получаем:
1 1 2 2 12
22 4,,.x yx x yx y x x=- =- = +
сложим два первых уравнения с учетом третьего:
4 .yy=-
ре-
шение этого дифференциального уравнения имеет вид:
( )
44
0 10 20
0 25,( ) .
tt
yt ye x x e
--
== +
таким образом, измеряемый сигнал у зависит от суммы на-
чальных условий, т. е. не будет меняться при перераспределе-
нии начальных условий (при сохранении их суммы). отсюда
следует невозможность однозначного восстановления началь-
ных условий по наблюдению за сигналом y(t), т. е. ненаблюдае-
мость схемы.
к этому результату можно было прийти более коротким пу-
тем, не прибегая к решению дифференциальных уравнений.
для доказательства ненаблюдаемости достаточно указать хотя
бы одно сочетание начальных условий, которое невозможно вос-
становить. Простой пример получаем, взяв х
10
= –х
20
, тогда из
схемы видно, что напряжение y(t) = 0 в любой момент времени.
такой выходной сигнал не несет никакой информации о процес-
сах в схеме, следовательно, она является ненаблюдаемой.
Рис. 6.17. Электрическая схема
3
3
Z
S
$
$
J
J
Í
Í
185
Упражнение 6. Проанализируйте поведение схемы при рав-
ных начальных условиях х
10
= х
20
. воспользуйтесь симметрией
схемы и соедините эквипотенциальные точки х
1,
х
2
(при этом
резисторы R и конденсаторы С окажутся включенными парал-
лельно).
Последний пример показывает, что для анализа наблюдае-
мости не обязательно исследовать динамику системы, а можно
ограничиться алгебраическими выкладками. наиболее извест-
ный алгебраический критерий основан на анализе матрицы на-
блюдаемости D, которая имеет вид
1
...
.
n-
éù
êú
êú
êú
=
êú
êú
êú
êú
ëû
c
cA
D
cA
(6.7)
если у системы s выходов, эта матрица имеет ns строк и n
столбцов. в пакете MATLAB матрицу наблюдаемости можно
найти с помощью команды obsv.
для того чтобы система (6.6) была наблюдаемой, необходи-
мо и достаточно, чтобы матрица наблюдаемости имела полный
ранг: rankD = n.
в случае систем с одним входом анализ ранга может быть за-
менен вычислением определителя (для наблюдаемости опреде-
литель должен быть отличен от нуля detD ≠ 0).
таким образом, наблюдаемость системы определяется свой-
ствами пары матриц А, с.
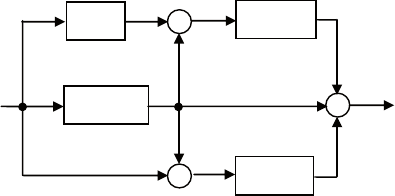
Пример 10. объект управления задан структурной схемой
(рис. 6.18), где Q
1
(p) = 1/(p + a
1
), Q
2
(p) = a
3
/(p + a
2
).
Рис. 6.18. Блок-схема для примера 10
B
2
Q
2
Q
2
Q
V
Z
186
требуется проанализировать его управляемость и наблюдае-
мость.
Решение. Принимая выходные сигналы блоков за переменные
состояния, перейдем к матричному описанию:
= + u,
X AX b
y = cX,
где X∈R
3
– вектор состояний; u, y – входной и выходной сигналы.
Постоянные матрицы A, b, c имеют вид:
[ ]
12
23
1
10
0 0 111
01 1
,, .
aa
aa
a
é ù éù
-
ê ú êú
ê ú êú
=- ==
ê ú êú
ê ú êú
-
ë û ëû
A bc
находим матрицы управляемости и наблюдаемости
2
2 12 3 1 2 13 23
2
3 23 23
2
3 1 1 13 23
1
,
a aa a a a aa aa
a aa aa
aa aaaaa
éù
-+ --
êú
êú
êú
=-
êú
êú
- --
êú
ëû
R
1 21
22
1 1 22 1
111
2
22
.
()
a aa
a a aa a
éù
êú
êú
=- - -
êú
êú
êú
- --
ëû
D
вычисляем определители: det(R) = 0, det(D) = 0. следователь-
но, система неуправляема и ненаблюдаема при любых а
1
, а
2
, а
3
.
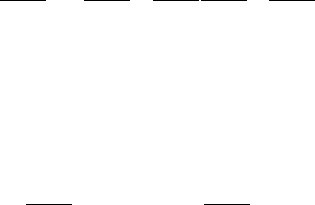
Пример 11. Проанализируем управляемость и наблюдаемость
системы, структурная схема которой приведена на рис. 6.19, а.
Способ 1 (анализ передаточной функции). Пользуясь схемой,
выпишем передаточную функцию
( )
3 1 21 1
1
1 2 12 1
.
p
Qp
p p pp p
æö
--
÷
ç
÷
=+ = =
ç
÷
ç
÷
ç
+ - +- +
èø
Произошло сокращение одинаковых множителей числителя
и знаменателя. это означает, что система либо неуправляема,
либо ненаблюдаема, либо то и другое одновременно.
найдем фазовую траекторию системы в плоскости сигналов
х
1
, х
2
. для этого запишем операторные выражения для этих сиг-
налов:
( ) ( )
12
13
11
( ), ( ).x p up x p up
pp
-
==
++
187
из них следует равенство:
12
30.xx+=
Мы получили уравнение прямой линии. если при t = 0 изо-
бражающая точка была в начале координат, то далее она сможет
двигаться только по этой прямой (рис. 6.19, б). следовательно,
система неуправляема.
для анализа наблюдаемости положим и = 0 и запишем равен-
ства
12
2() (); ()( ) (),yp x p yp p x p= -=
откуда
12
2() (), () () ().x t yt x t yt yt= =-
эти формулы позволяют оценить значения переменных x
1
(t),
x
2
(t) в любой момент времени, в том числе и при t = 0. следова-
тельно, система наблюдаема.
Способ 2 (анализ матриц управляемости и наблюдаемости).
Перейдем от схемы (см. рис. 6.19, а) к описанию в пространстве
состояний
( )
12
2 ,p xxu- =+
( )
2
13.px u+ =-
После несложных преобразований получаем
1 12
2 ,x xxu= ++
22 1
3 ;.x x u yx=- - =
выписываем матрицы А, b, с и матрицы управляемости и на-
блюдаемости R, D:
Рис. 6.19. Пример неуправляемой системы
Y
Y
s
Q
Qs
À
Ë
Í
Í
б)
а)

188
[ ]
2 1 1 1 1 10
10
0 1 3 3 3 21
,, , , .
é ù éù é ù é ù
-
ê ú êú ê ú ê ú
= == = =
ê ú êú ê ú ê ú
-- -
ë û ëû ë û ë û
A bc R D
вычисляем определители матриц R, D:
01;.==RD
следовательно, система неуправляема, но наблюдаема.
6.5. Грамианы управляемости и наблюдаемости
другой способ проверки управляемости и наблюдаемости си-
стемы (6.4) опирается на вычисление грамианов управляемости
и наблюдаемости. так называются симметричные квадратные
матрицы W
c
и W
o
, определяемые равенствами
TT
TT
00
dd,.
t t tt
co
tt
¥¥
==
òò
AA A A
W e bb e W e c ce
(6.8)
в пакете MATLAB их можно найти с помощью команд типа
gram(sys, ‘c’), gram(sys, ‘o’). их первый входной аргумент – имя систе-
мы, второй – опция ’c’ или ’о’ (от controllability и observability).
необходимым и достаточным условием управляемости и на-
блюдаемости служит невырожденность этих матриц: det W
c
≠ 0,
det W
o
≠ 0.
грамианы W
c
и W
о
удовлетворяют матричным уравнениям
Ляпунова
T T TT
,.
c c oo
+ =- + =-W A AW bb W A A W c c
наряду с грамианами управляемости и наблюдаемости рас-
смотрим кросс-грамиан W
co
(определен только для скалярных
систем)
0
d.
tt
co
t
¥
=
ò
AA
W e bce
(6.9)
кросс-грамиан, в отличие от грамианов управляемости и на-
блюдаемости, в общем случае не является симметричной матри-
цей, однако все его собственные числа вещественны.
он удовлетворяет матричному уравнению Ляпунова
.
co co
+ =-W A AW bc
для решения уравнений Ляпунова в
MATLAB существует команда lyap. команда для вычисления
кросс-грамиана
co
W
будет иметь вид
=W AAb clyap( , , * ).
co
для
189
контроля вычисления грамианов
,
c
W
,
o
W
co
W
удобно использо-
вать связывающее их соотношение
2
.
co c o
=W WW
кросс-грамиан отражает как свойства управляемости, так
и свойства наблюдаемости системы. из равенства
2
co c o
=W WW
следует, что
( )
2
det det det ,
c o co
=WW W
т. е. вырожденность лю-
бого из грамианов
c
W
или
o
W
приводит к вырожденности
co
W
.
Поэтому наличие ненулeвого определителя
0det
co
¹W
является
критерием одновременной управляемости и наблюдаемости си-
стемы.
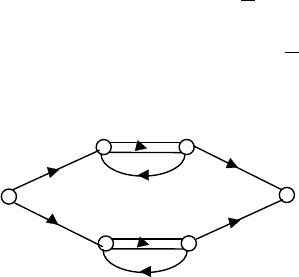
Пример 12. исследуемая система, содержащая два парал-
лельно включенных апериодических звена, задана сигнальным
графом (рис. 6.20).
чтобы найти ее грамианы управляемости и наблюдаемости,
перейдем к описанию в пространстве состояний. оно характери-
зуется матрицами
[ ]
10 3
11
02 3
,, .
é ù éù
-
ê ú êú
= ==
ê ú êú
--
ë û ëû
A bc
для вычисления грамианов нам потребуются матрицы
2
22
03
03
,, .
tt
t t ttt
tt
ee
ee
ee
--
--
--
é ù éù
ê ú êú
éù
= ==
ê ú êú
êú
ëû
ê ú êú
-
ë û ëû
A AA
e e b ce
Подставляем их в формулы (6.8):
23
34
0
9
3
2
9d
9
3
4
,
tt
c
tt
ee
t
ee
¥
--
--
éù
êú
-
éù
-
êú
êú
==
êú
êú
êú
êú
-
-
ëû
êú
êú
ëû
ò
W
Рис. 6.20. Сигнальный граф для примера 12
V
Z
Y
Y
s
s
s

190
23
34
0
11
23
d
11
34
.
tt
o
tt
ee
t
ee
¥
--
--
éù
êú
éù
êú
êú
==
êú
êú
êú
êú
ëû
êú
êú
ëû
ò
W
определители грамианов отличны от нуля, поэтому система
управляема и наблюдаема.
Упражнение 7. найти кросс-грамиан системы и прямой под-
становкой проверить, что грамианы удовлетворяют трем уравне-
ниям Ляпунова.
все три грамиана, введенные выше, существуют только для
устойчивых систем. При анализе неустойчивых систем возника-
ет необходимость вычисления грамианов
( ),
c
TW
( ),
o
TW
()
co
TW
для конечного интервала времени T. они определяются форму-
лами вида (6.8), (6.9), в которых бесконечный верхний предел
интегрирования заменен на конечный предел T. это приводит
к изменению уравнений Ляпунова, которые принимают вид
T T TT
() () ,
cc
TT+ =- +W A AW BB FBB F
T T TT
() ()
oo
TT+ =- +W A AW CC FCCF,
T
() () ; .
co co
TT+ =- + =
A
W A AW bc FbcF F e
для решений этих уравнений может быть использован опера-
тор MATLAB lyap. Поясним это на примере вычисления кросс-
грамиана:
* * ***
co
F=expm(A T); W =lyap(A, A, b c–F b c F).
если нужно вычислить значение грамианов устойчивой си-
стемы для серии различных интервалов времени T, то удобнее
воспользоваться формулами
T
00
() , () ,
c c o co
TT=- =-W W FW F W W FW F
() ,
co co co
T =-W W FW F
связывающими значения грамианов на конечном и бесконечном
интервалах времени.
Подведем итоги анализа управляемости и наблюдаемости.