Malcolm Barnes. Practical Variable Speed Drives and Power Electronics
Подождите немного. Документ загружается.

Selection of AC converters 179
• Speed regulation requirements with changes in load, temperature, supply
voltage
• The duty cycle, including the number of starts and stops per hour
• Overall power factor of the drive system and its effect on the mains supply
• EMI and harmonics in the mains power supply and in the motor and motor
cable
• Are EMI filters required?
• Earthing, shielding and surge protection requirements
• Torque pulsations in the rotor shaft
• Control method - manual, automatic, analog, digital, communications
• Control and communications interfaces required for the plant control system
• Indications required
• Reliability requirements, is a dedicated standby unit required
• Protection features, in-built and external features required
• Power and control cable requirements
• Parameter settings, local or remote programming
• Maintenance, spares and repair considerations
• Cost of the alternative systems, taking into consideration the capital cost,
performance advantages, energy savings, efficiency or process improvements.
• Noise due to the harmonics in the motor
• Mechanical resonance at certain motor speeds
This chapter covers many of the technical issues that need to be considered, but will not
be able to address all the above factors in detail.
:NKHGYOIYKRKIZOUTVXUIKJ[XK
Experience has shown that most of the problems experienced with AC VSD applications
can usually be attributed to human error, mainly.
• The incorrect selection and rating of the AC induction motor
• The incorrect selection and rating of the AC converter
• The incorrect parameter settings installed in the VSD control system
As with all other electrical equipment, it is essential that the drive be correctly rated to
do the job under all anticipated circumstances. The AC variable speed drive system is
correctly selected and rated when:
• Motor specification is correct
The correct type and size of electric motor has been selected, whose output torque,
speed and accuracy are adequate for all load and environmental conditions.
• Ac converter specification is correct
The correct type and size of AC converter has been selected, whose output (voltage,
current, frequency) meets the motor requirements for all load and environmental
conditions.
Usually, too much emphasis is placed on the selection of the converter, which is the
expensive part, while too little emphasis is placed on the selection of the motor.
180 Practical Variable Speed Drives and Power Electronics
The correct procedure is:
• The first step is to select a correctly rated electric motor
• Only when this is completed, a suitable AC converter is chosen to match the
requirements of the motor
From the motor point of view, the main factors which need to be considered are the
motor power rating (kW), the number of poles (speed) and the frame size so that the load
torque on the motor shaft remains within the continuous torque capability of the motor at
all speeds within the speed range. High torques of short duration, such as starting torque,
can usually be easily accommodated within certain limits outlined below.
:NKRUGJGHOROZ_ULIUT\KXZKXLKJYW[OXXKRIGMKSUZUXY
When selecting an AC motor for any drive application, the most important requirement is
to ensure that the motor does not become overloaded or stall under all circumstances of
speed and load, i.e. over the entire speed range.
To stay within the temperature rise limits of the motor, the torque required by the load
for starting, acceleration and for continuous running must be within the rated output
torque capacity of the motor.
For AC motors connected to the power supply direct-on-line (DOL), it is usually
sufficient to ensure that load torque is sufficiently below motor torque at the rated speed
of the motor, for example the torque at 1450 rev/m on a 4 pole motor. These fixed speed
drives operate only at one speed. It may also be necessary to ensure that the starting
torque of the motor is higher than the breakaway torque of the load.
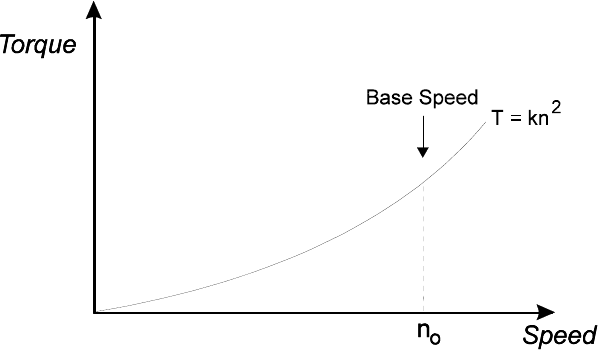
In the case of a variable speed drive, the load torque usually changes with speed, so it is
essential to check that the motor torque exceeds the load torque at all speeds in the speed
range. For example, a centrifugal pump has a variable torque characteristic, where the
starting torque is low and the torque increases as the square of the speed as shown in
Figure 7.6. Other loads, such as a conveyor, may have a constant torque characteristic,
where the load torque remains constant for all speeds, as shown in Figure 7.7.
The continuous load torque capacity (loadability) of a standard TEFC squirrel cage
induction motor used with VVVF converters is always lower than the rated torque of the
motor itself for the following reasons:
• At all speeds, the load capacity is reduced as a result of additional heating in
the motor caused by harmonic currents, however small. These occur because
the output current waveform of the converter is not completely sinusoidal,
even with modern PWM inverters with switching frequencies around 10 kHz.
Traditionally, a de-rating of between 5% and 10% was used, depending on the
type of motor (number of poles) and the type of converter. But, it has become
common practice with modern PWM inverters to make provision for no de-
rating at all. This relies on the fact that modern IEC motors always have a
built-in thermal reserve (refer to Chapter 2), which will accommodate any
additional heating. Also, the mechanical load is seldom exactly equal to the
motor rating and is often lower by as much as 20%.
It is considered good engineering practice to allow a small margin of safety,
so a de-rating of up to 5% is usually provided.
Selection of AC converters 181
Consequently, the overall output torque of the VSD, running at its base speed
of 50 Hz, is taken to be about 95% of the motor catalogue’s rated torque at 50
Hz and at rated DOL supply voltage.
• At speeds below base speed, in the speed range 0–50 Hz, the motor’s
continuous load capacity is reduced because of decreased fan cooling of both
the stator and the rotor. The reduction in continuous torque output depends on
the type and size of the motor, but in the absence of other de-rating tables, can
be assumed to reduce to about 40% of rated torque at standstill. Some natural
radiated and convectional cooling from the motor frame takes place even
when stopped.
For some constant torque applications, a separately powered auxiliary cooling
fan mounted onto the motor can be used to improve stator cooling and
increase load capacity at low speeds. These are usually designed to provide a
motor with a volume of air equal to that flowing at rated speed for a motor of
equal frame size. This supplementary cooling does not entirely overcome the
load capacity problem. In a squirrel cage motor, the rotor losses are usually
higher than the stator losses and the rotor losses become difficult to dissipate
at low speeds even with supplementary cooling. Separate cooling is more
effective with open motors (IC01).
• At speeds above base speed, the output torque capability of the motor is
reduced because of reduced air-gap flux (lower magnetic field). The output
torque reduces in direct proportion with the motor speed above 50 Hz. (Refer
to next Section 7.4.)
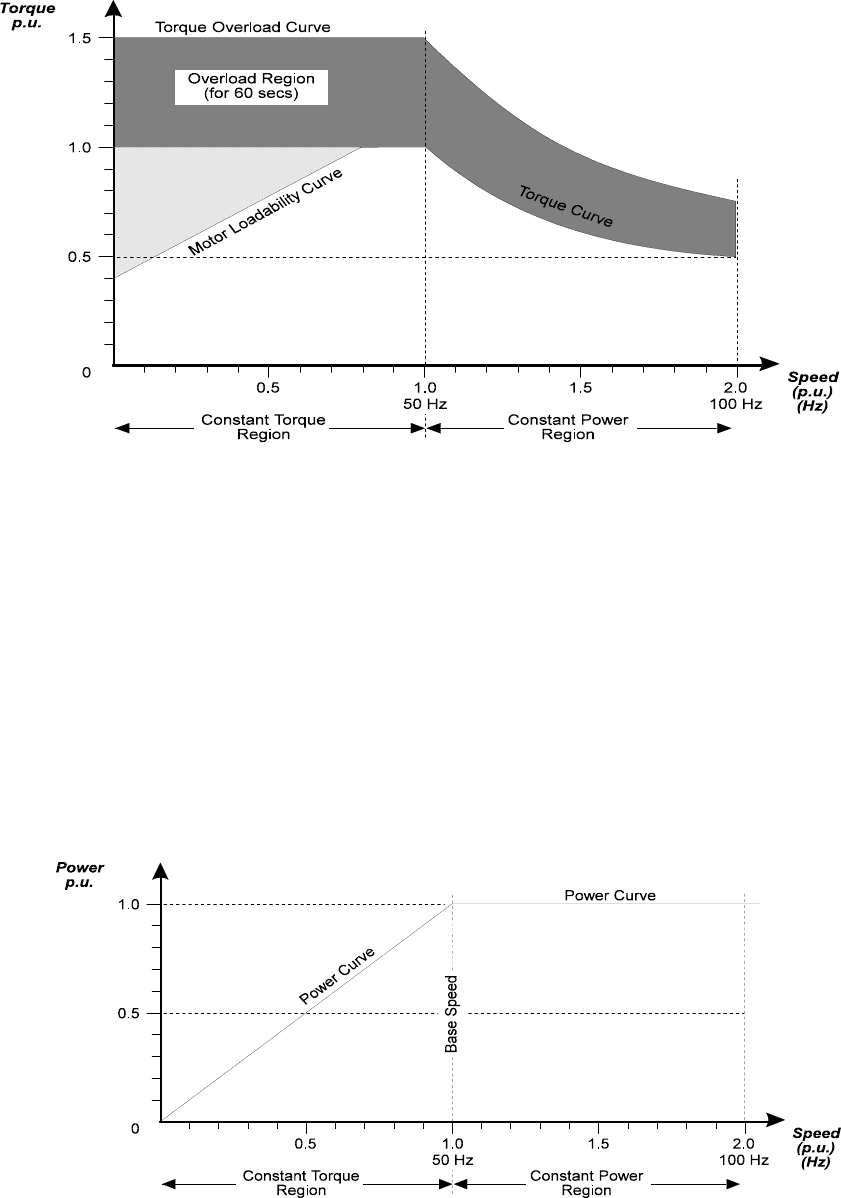
The AC VSD loadability curve, shown in Figure 7.1 below, summarizes the factors
above and the solid line marks the maximum limits of continuous load torque. Motors fed
from VVVF converters can be loaded continuously at torques below the loadability limit
line for the speed range.
However, motors can tolerate load torques greater than the level permitted by the
loadability curve for short periods of time. High torques are usually required during
starting and acceleration up to the preset speed range. The duration of the allowed
overload depends on several factors such as the size of the motor, the magnitude of the
overload and the speed. Many AC converters have an over-current capacity of up to
150% for 60 secs to cover starting and transient operation.
182 Practical Variable Speed Drives and Power Electronics
Figure 7.1:
The speed range and load torque capacity (loadability) of a TEFC squirrel cage motor when controlled by a
PWM-type VVVF converter
The above curve shows the thermal load capacity of an AC VSD that is typical of
curves used by many drives specialists. They are based on standard IEC-type squirrel
cage motors running with PWM-type VVVF converters. The curves are given in per unit
values, so they can be applied to motors of any voltage and size. Small motors below
5.5 kW have a slightly higher load capacity at low speeds.
The equivalent load power (kW) capacity curve is shown in the figure below. In the
region below base speed, known as the constant torque region, the power capability
increases linearly from zero at zero speed to full power at the base speed.
Above base speed, the power output capability cannot increase further and remains
constant for further increases in speed. This is known as the constant power region.
Figure 7.2:
Load power capacity of a TEFC squirrel cage motor when controlled by a PWM-type VVVF converter

Selection of AC converters 183
5VKXGZOUTOTZNKIUTYZGTZVU]KXXKMOUT
As with the DC drive, the motor output torque of an AC VSD is proportional to the
product of the air-gap flux and the torque-producing rotor current. The stator current
can be taken to be roughly the same as the rotor current (refer to Chapter 6).
The control system of a typical open-loop VVVF drive system generates an output
voltage with a constant V/f ratio, to provide approximately constant motor air-gap flux in
the region between zero speed and the base speed (50 Hz). This produces a constant
torque characteristic in the region between zero and the base speed of 50 Hz and the
power increases in proportion to speed.
It is possible to increase the inverter output frequency beyond the base speed, in fact to
frequencies as high as 400 Hz, in some converters. At speeds above the base speed, the
output voltage remains constant at the maximum level possible from the fixed DC bus.
Consequently, the V/f ratio (air-gap flux) will fall in inverse proportion to the inverter
frequency and the output torque of the motor falls in proportion with the flux. In this
region, although torque is reduced, the output power remains constant and this region is
known as the constant power region or the field weakening region. The latter name comes
from the DC drive terminology, where speed can be increased above the base speed by
reducing (weakening) the field flux. Essentially the same thing is happening here.
The main effect of operation above the base speed is the reduction in output torque of
the motor in direct proportion to the increase in speed. In this region, precautions need to
be taken to ensure that the motor torque does not fall below that of the load, otherwise the
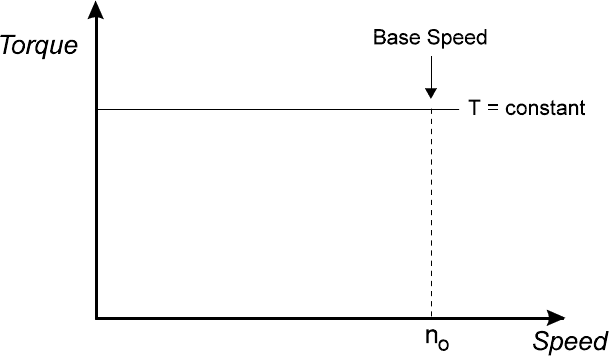
motor will stall. The figure below shows the torque–speed curve (dashed line) and
power–speed curve (solid line) for the two regions:
• Constant torque region, below base speed
• Constant power region, above base speed (field weakening region)
Figure 7.3:
Torque–speed and power–speed curves for an AC VSD
184 Practical Variable Speed Drives and Power Electronics
:NKTGZ[XKULZNKSGINOTKRUGJ
No electric motor drive, fixed or variable speed, can be correctly specified without
knowing something about the machine that is to be driven, specifically the machine load.
For fixed speed drives, it is often thought to be sufficient to specify only the power
requirement in kW at the rated speed. On larger drives, motor manufacturers usually ask
for more information about the load, such as the moment of inertia, to ensure that the
design of the motor can cope with the acceleration requirements. In the case of AC
variable speed drives, more details about the load characteristics are always necessary.
The output torque of an AC VSD is considered to be adequate when it:
• Exceeds the breakaway torque of the machine load
• Can accelerate the load from standstill to its preset speed within the
acceleration time required by the process
• Exceeds the load torque by an adequate margin during continuous operation at
any speed in the speed range and under all conditions
• Motor current does not exceed the thermal ratings of all electrical components
and remains below the loadability curve during continuous operation.
The selection procedure outlined below applies mainly to single motor AC variable
speed drives without special requirements and where the drive is continuous after an
initial acceleration period. This means that a standard TEFC squirrel cage induction
motor and a standard AC VVVF converter can be used. Multi-motor VSDs and other
special applications require further investigation and will be considered in later sections.
In general, special applications should be referred to the manufacturers of motors and/or
AC converters for special rating calculations.
There are a great variety of different types of machine loads that are commonly driven
by VSDs, each with different characteristics of torque, inertia, etc. Examples are pumps,
fans, crushers, compressors, conveyers, agitators, etc. For VSD applications, most of
what needs to be known about the machine load can be covered by the following:
• The load torque, the type, magnitude and characteristics of the load torque
connected to the output shaft of the motor
• The speed range, the minimum and maximum speed of the variable speed
drive
• The inertia of the motor and mechanical load connected to shaft of the motor
:NKRUGJZUXW[K
The torque required by the driven machine determines the size of the motor because the
continuous rated torque of the motor must always be larger than the torque required by
the driven machine.
The magnitude of the load torque determines the cost of the motor because, as a rule of
thumb, the cost of an electric motor is approximately proportional to its rated output
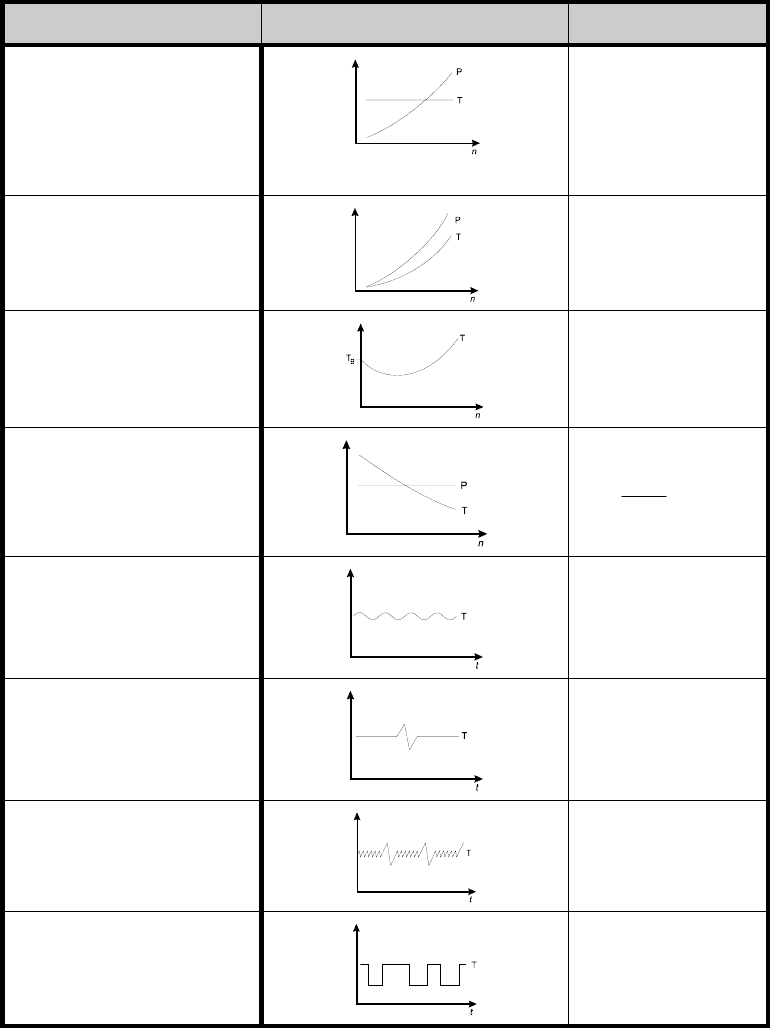
torque (not its rated power!). The load torque is not necessarily a fixed value. It can vary
with respect to speed, position, angle and time as shown in the table of Figure 7.4.
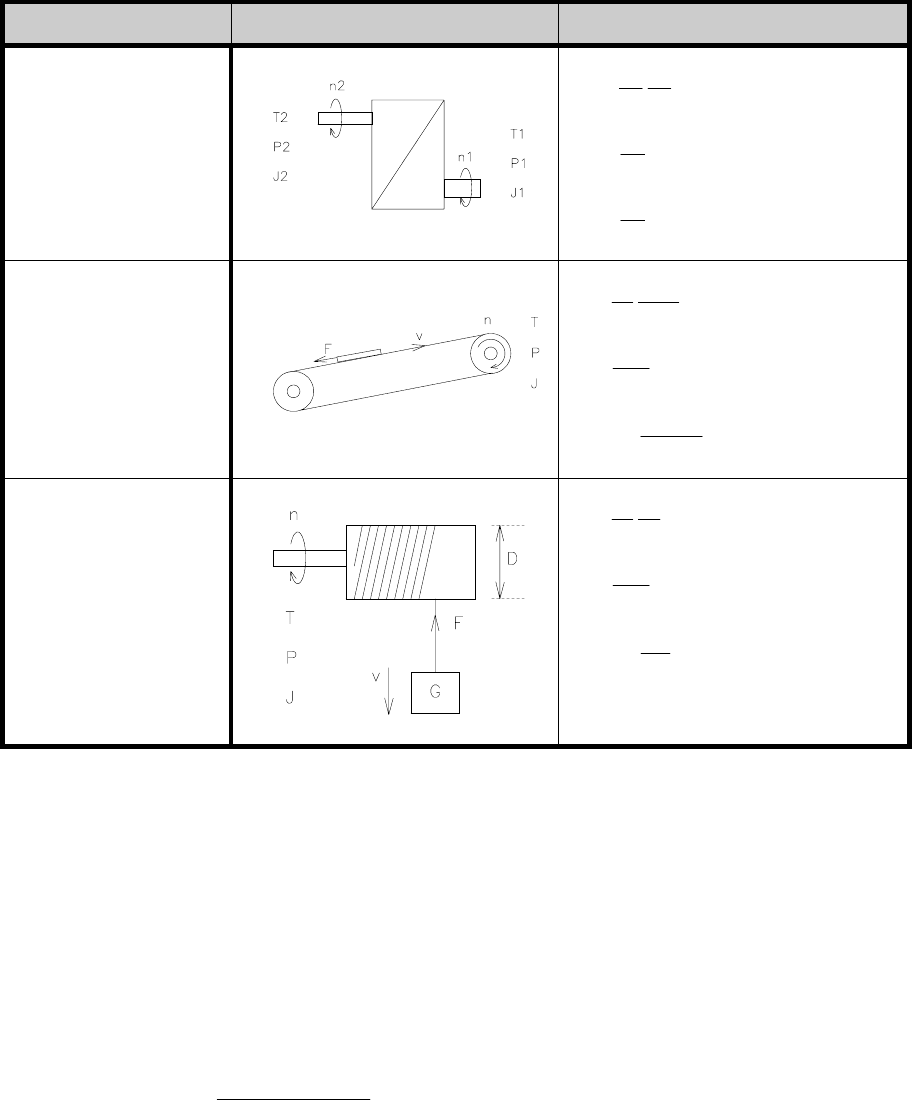
Another important aspect of the load torque is that the figure should apply at the shaft
of the motor. When gearboxes, conveyers or hoists are involved, the actual torque at the
machine must be converted to torque at the motor shaft. The conversion formulae are
given in Figure 7.5 to convert the load torque, speed and moment of inertia to motor shaft
values.
Selection of AC converters 185
3GINOTK2UGJ )NGXGIZKXOYZOI)[X\K ,UXS[RGK
)UT\K_UXYYIXK]
)UT\K_UXY
6UYJOYVRV[SVY
)USVXKYYUXY
(GRRSORRY
(Constant) k = T
T . n . k = P
)KTZXOL[MGRV[SVY
)KTZXOL[MGRLGTY
2
n k = T
×
3
n k = P
×
+^ZX[JKXY
9R[XX_V[SVY
Breakaway =T
B
=OTJKXY
2GZNKY
k = P
n
P . k
= T
8KIOVXUIGZOTM3GINOTKY
6XKYYKY
)X[YNKXY
3ORRY
=UUJINOVVKXY
)XGTKY
9G]SORRY
6XKYYKY
Figure 7.4:
Torque characteristics of typical types of machine loads as a function of speed angle and time. (Note: k =
constant)
186 Practical Variable Speed Drives and Power Electronics
3KINGTOIGR*K\OIK )NGXGIZKXOYZOI )UT\KXYOUT,UXS[RGK
-KGXHU^
n
n
T
=
T
2
1
1
2
η
η
P
=
P
1
2
η
P
=
P
1
2
)UT\K_UX
n
v
F
= T
πη
2
η
v F
= P
n)(2
v
M= J
π
2
2
.UOYZ
2
D
F
= T
η
η
v F
= P
4
2
D
M= J
n D = v π
T = Torque in Nm F = Force in N
P = Power in kW v = Velocity in m/sec
J = Inertia in kgm
2
η = Efficiency in p.u.
Figure 7.5:
Formulae to convert load torque, power and moment of inertia to motor shaft values
The load requirements are often given as the mechanical absorbed power (P
M
kW) at a
particular speed (n rev/m). The mechanical load torque may then be calculated from the
following formula given in Chapter 2:
Nm
(rev/m)
(kW)9550
M
n
P
=
T
M
×
Where T
M
= Mechanical torque at the motor shaft in Nm
P
M
= Absorbed load power at the motor shaft in kW
n = Actual rotational speed of the motor shaft in rev/min
Selection of AC converters 187
<GXOGHRKZUXW[KSGINOTKRUGJY
Variable torque machine loads are those which exhibit a variable torque over their entire
speed range, such as centrifugal pumps and fans. The torque–speed curve for these loads
are shown in Figure 7.6 below.
Figure 7.6:
Torque–speed characteristic of a variable torque load
The use of variable speed drives for the speed control of pumps and fans are the
simplest applications and provide the least number of problems. The reason is that the
breakaway starting torque is usually very low and then rises with speed.
The following are some of the important factors associated with this type of load:
• The starting torque for normal centrifugal pumps and fans is very low and
below the loadability curve of the AC motor for all speeds. Slurry pumps can
sometimes be a problem, as they can have a high breakaway torque.
• The required starting current is low, so the overload capacity of converters is
seldom required during acceleration.
• Running for long periods at low speeds is seldom a problem.
• However, running at speeds above the motor base speed could be a problem,
because the power requirement of this drive increases as the cube of the
speed. This is incompatible with the capabilities of the constant power region.
The manufacturers of modern PWM converters have tried to reduce the cost of VSDs
for pump and fan applications by providing reduced performance drives with the
following features:
• Low over-current capability, typically up to 120% for 30 sec
)UTYZGTZZUXW[KSGINOTKRUGJY
Constant torque machine loads are those which exhibit a constant torque over their entire
speed range, such as conveyors, positive displacement pumps, etc. The torque and power
curves for these loads are shown in Figure 7.7 below.
188 Practical Variable Speed Drives and Power Electronics
Figure 7.7:
Torque–speed characteristic of a constant torque load
The following are the potential problems when driving constant torque loads from a
converter fed electric motor:
• The starting torque is theoretically equal to the full speed load torque but, in
practice, the real starting torque can be much higher due to the additional
requirements of:
− breakaway torque
− acceleration torque (dynamic torque)
• Running for long periods at low speeds can result in motor thermal over-load,
if the load torque is above the motor loadability curve. Separate forced
cooling may be necessary in some cases.
• Running at speeds above the motor base speed could also be a problem, with
increased motor slip and a higher possibility of stalling the motor.
The manufacturers of modern PWM converters have tried to overcome some of these
problems by providing the following features:
• High short time over-current capability, typically up to 150% for 60 sec,
which is often required during starting
• Voltage boost to compensate for stator volt-drop at low frequencies
• Providing adequate motor protection to protect the motor from overload
− Motor thermal protection which models low speed cooling reduction
− Motor thermistor protection inputs
Some of these limitations are illustrated in the loadability curve of Figure 7.1.
:NKYVKKJXGTMK
The selection of the correct size of electric motor for a VSD is affected by the speed
range within which it is expected to run continuously. The important factor is that the
motor should be able to drive the load continuously at any speed within the speed range