Лукашук В.С. Нестандартное оборудование вагоносборочного производства. Конструкция, проектирование, расчет
Подождите немного. Документ загружается.


60
Таблица 4.5
Параметры пневматических цилиндров без торможения
D d
D
(откло-
нение
по h
8
)
Для подвода воздуха
d
2
d
3
A±0,3
B ℓ ℓ
2
m
S
(пред.
откл.
по С
5
)
ℓ
1
h, не
более
h
1
K K
1
Ход
поршня L
по ГОСТ
6540-68
Резьба
метриче-
ская
Резьба ко-
ническая,
дюймы
25
32
10 20 M10×l К ⅛ М6 М5
28
34
38
45
16
15
16
9 8 10 5 4 92 115
10—250
10—320
40 12 45 M12×l,5 К ¼ М8 М6 42 55 20 20 12,5
10 20 12 4 98 127
10—400
50
63
16 52 М12×1,5 К ¼ М10 М8
52
60
70
78
25 25 12,5
14 24 12
4
5
106
143
10—500
10—630
80 25 65
М12×1,5
М16×1,5
К ¼
К ⅜
M16 М8 75 92 32 28
12,5
15
22 28 13 5
110
120
150
160
10—160
180—800
100
25 65
М12×1,5
M16×1,5
К ¼
К ⅜
M16 М10
92 115
32 35
12,5
15
22 28 13 5
110
120
160
170
10—200
220—1000
125
32 75
M16×1,5
M18×1,5
К ⅜
К ½
М20 М12
110 140
40 42
15
17,5
27
35
30
18
13
5
120
130
180
190
10—250
280—1250
160
40 85
M16×l,5
М18×1,5
К ⅜
К ½
М24 М16
140 180
50 52
15
17,5
36
38
33
22
17
8
120
130
193
203
10—250
280—1600
200
50 110
М18×1,5
М24×1,5
К ½
К ¾
М30 М20
172 220
60 62
17,5
20
46
45
40
29
24
8
132
142
220
230
10—320
360—2000
250
63 115
М18×1,5
М24×1,5
К ½
К ¾
М36×3
М20
210 275
60 70
17,5
20
55
55
50
35
30
8
150
160
245
255
10—360
400—2500
320
80 135
М24×1,5
М30×2
К ¾
К1
М48×3
М24
265 345
80 80
20
25
75
77
67
55
45
10
160
180
270
290
10—400
450—2500
Цилиндры D = 25—40 мм с внутренней резьбой (рис. 4.9, исполнение 2) не изготавливаются

61
Таблица 4.6
Параметры цилиндров с креплением на фланцах
Ход поршня L
цилиндра без
торможения по
ГОСТ 6540-68
D
А
1
А
2
В
2
D
2
d
5
l
3
l
4
Пред. откл.
±0,3
25 28 52 65 20 6 8 4 10—250
32 34 60 72 20 6 8 4 10—320
40 42 70 85 50 7 8 4 10—400
50 52 85 100 60 7 8 4 10—500
63 60 95 100 60 7 10 5 10—630
80 75 112 130 80 9 12 7
10—160
180—800
100 92 138 162 80 11 14 9
10—200
220—1000
125 110 165 190 100 13 16 11
10—250
280—1250
160 140 212 245 125 17 18 11
10—250
280—1600
200 172 260 300 160 22 22 14
10—320
360—2000
250 210 305 345 200 22 28 20
10—360
400—2500
320 265 380 430 250 26 32 22
10—400
450—2500
При креплении цилиндров на лапах (рис. 4.11, табл. 4.7) в комплект ци-
линдра включают две лапы, присоединенные к нему тоже на удлиненных
стяжках. В качестве заготовок для изготовления лап применяют го-
рячекатаные уголки. В лапах тоже предусмотрено четыре отверстия для
крепления цилиндра на основания стенда.
Рис. 4.11. Пневмоцилиндры с креплением на лапах: 1 — цилиндр; 2 — лапа

62
Таблица 4.7
Параметры цилиндров с креплением на лапах
Ход поршня L
по ГОСТ 6540-68
D
А
1
А
2
В
1
d
4
m
1
K
2
K
3
Пред. откл.
±0,3 ±0,1
25
32
40
28
34
42
26
30
36
45
52,5
63,5
6
6
7
3,5
3,5
4
125
125
138
140
140
155
10—250
10—320
10—400
50
63
52
60
45
50
80
89
9
9
5
5
160
160
182
182
10—500
10—630
80 75 58 104 11 6
170
180
195
205
10—160
180—800
10
0
92 72 129,5 13 8
182
192
210
220
10—200
220—1000
12
5
110 85 155 17 10
210
220
246
256
10—250
280—1250
16
0
140 110 200 22 12
230
240
272
282
10—250
280—160
20
0
172 130 240 22 12
250
260
292
302
10—320
360—2000
25
0
210 155 292,5 26 14
278
288
326
336
10—360
400—2500
32
0
265 190 362,5 32 18
320
340
376
396
10—400
450—2500
Цилиндр с креплением на проушине (рис. 4.12, табл. 4.8) широко при-
меняется в пневмоприжимах с рычажно-шарнирными схемами передачи
прижимного усилия. В таких цилиндрах к заднему фланцу прилита или при-
варена проушина с отверстием, допускающая крепление цилиндра с исполь-
зованием стандартной оси.
Рис. 4.12. Пневмоцилиндр с креплением на проушине

63
Таблица 4.8
Параметры цилиндров с креплением на проушине
D d
6
d
7
t l
5
K
4
Ход поршня L
по ГОСТ 6540-68
25
32
8 18 14 18 104
10—250
10—320
40
50
12 25 18 24
112
120
10—400
10—500
63
16 32 30
28 124 10—630
80 33
133
138
10—160
180—800
100 25 50 40 40
142
147
10—200
220—1000
125 25 50 40 40
152
157
10—250
280—1250
160 32 60 55 40
160
165
10—250
280—1600
200 32 60 55 45
177
182
10—320
360—2000
250 40 80 80 60
210
215
10—360
400—2500
320 45 100 85 80
240
250
10—400
450—2500
В схемах с креплением цилиндра на цапфах (рис. 4.13, табл. 4.9) на гиль-
зу цилиндра надет хомут в виде плиты квадратной формы с отверстиями под
гильзу цилиндра и под стяжки. Соединяют хомут с гильзой сваркой (до рас-
точки гильзы). В хомут вмонтированы две цапфы, которые используют для
шарнирного крепления цилиндра на кронштейнах рамы стенда.
Рис. 4.13. Пневмоцилиндр с креплением на цапфах:
1 — цилиндр; 2 — хомут; 3 — цапфа

64
Таблица 4.9
Параметры цилиндров с креплением на цапфах
D В
3
d
7
t l
5
K
4
Ход поршня L
по ГОСТ 6540-68
25
32
8 18 14 18 104
10—250
10—320
40
50
12 25 18 24
112
120
10—400
10—500
63
16 32 30
28 124 10—630
80 33
133
138
10—160
180—800
100 25 50 40 40
142
147
10—200
220—1000
125 25 50 40 40
152
157
10—250
280—1250
160 32 60 55 40
160
165
10—250
280—1600
200 32 60 55 45
177
182
10—320
360—2000
250 40 80 80 60
210
215
10—360
400—2500
320 45 100 85 80
240
250
10—400
450—2500
Кроме оговоренных ГОСТ 15608-81 параметров пневмоцилиндры ха-
рактеризуются ходом поршня — максимально возможным перемещением
поршня с одного крайнего положения в другое.
Пневмоцилиндры удобны тем, что они могут обеспечить достаточно
большой ход поршня (свыше 1000 мм) и большую силу на штоке. Однако
они сложны по конструкции, требуют высокой чистоты и точности обра-
ботки поверхностей. Этими недостатками не обладают пневмокамеры.
Диафрагменная пневматическая камера (рис. 4.14, табл. 4.10) пред-
ставляет собой две литые тарели, между которыми зажата резиновая ди-
афрагма со штоком. На передней тарели смонтирована направляющая для
перемещения штока, а также отлит фланец для крепления камеры на метал-
локонструкции приспособления. При подаче сжатого воздуха в полость ме-
жду задней тарелью и диафрагмой диафрагма будет выпучиваться и пере-
мещать шток вправо, создавая усилие, необходимое для закрепления детали.
Пневмокамеры экономичнее пневмоцилиндров по расходу сжатого воз-
духа, однако они имеют малый ход штока (до 80 мм).

65
Рис. 4.14. Диафрагменная пневмокамера: 1 — задняя тарель; 2 — шток;
3 — диафрагма; 4 — передняя тарель; 5 — крепежный фланец
Таблица 4.10
Параметры диафрагменных пневмокамер
Усилие на
штоке, кН
d
1
d
2
d
3
d
4
d
5
d
6
d
7
h
1
h
2
h
3
4,35 70 92 112 215 160 32 M16 40 140 71
6,75 70 92 110 228 178 32 M16 45 141 77
6,80 75 102 110 270 200 30 M20 50 158 81
11,00 85 115 140 320 250 50 M24 70 180 91
17,50 105 135 160 390 320 50 M30 70 210 106
66
Пневмоцилиндры и пневмокамеры можно применять для прижатия де-
талей как непосредственно штоком с насаженной на него опорой пятой,
так и через систему рычагов. Применение рычажной системы позволяет
получить силу прижатия детали, отличающуюся от силы на штоке пнев-
моцилиндра. Кроме того, рычажные конструкции пневмоприжимов по-
зволяют вынести громоздкие элементы прижима из зоны выполнения сбо-
рочных и сварочных работ.
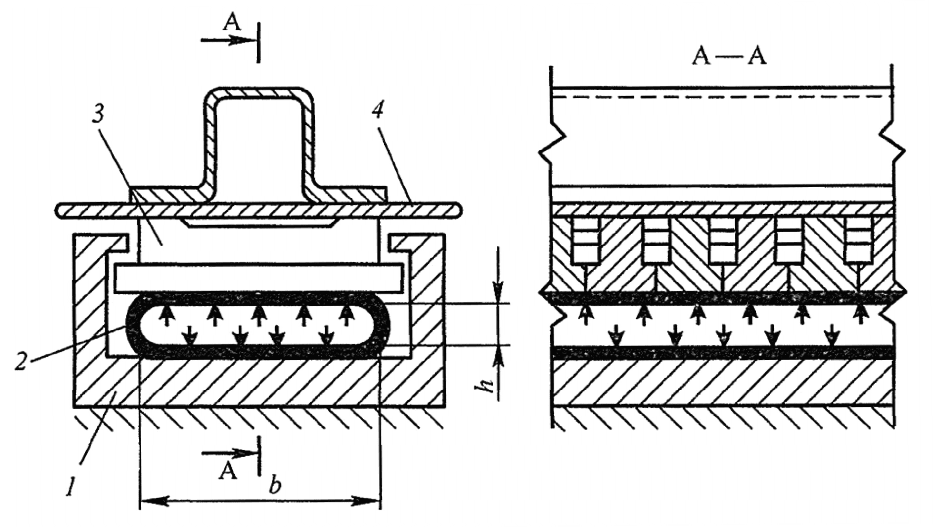
Пневматические прижимы с силовым элементом в виде пневмошланга
применяют в тех случаях, когда необходимо осуществить сплошное под-
жатие детали с малой изгибной жесткостью, например, поджатие в боль-
шом числе близко расположенных точек листа обшивки к стойкам боко-
вой стены. Конструкция шлангового прижима представлена на рис. 4.15.
Прижим выполнен в виде корпуса, закрепленного на металлоконструкции
сборочного приспособления. В корпусе свободно размещен шланг из про-
резиненной ткани и набор толкателей. По концам шланг закрыт заглуш-
ками, в одной из которых имеется резьбовое отверстие для штуцера, пред-
назначенного для подключения шланга к пневмомагистрали. При подаче
сжатого воздуха в шланг он будет деформироваться, стремясь восстано-
вить цилиндрическую форму, и перемещать толкатели вместе с прижи-
маемым листом.
Рис. 4.15. Схема шлангового прижима:
1 — корпус; 2 — шланг; 3 — толкатель; 4 — прижимаемая деталь

67
Распределенная по длине прижима сила, которую может создать шлан-
говый прижим, определяется выражением
=ρ(−ℎ),(4.13)
где k — коэффициент, учитывающий потери на трение и деформирование
шланга (в расчетах принимают k = 0,7);
ρ — давление сжатого воздуха;
(b – h) — рабочая ширина шланга;
h — высота шланга в рабочем положении прижима;
b — внутренняя ширина шланга (см. рис. 4.15).
Высота шланга в рабочем положении складывается из двух величин
h = h
1
+ h
2
,
где h
1
— высота шланга в исходном (сплющенном) положении;
h
2
— необходимый ход шланга.
Высоту h
1
обычно принимают равной h
2
≈ 5 мм. При заданном погонном
прижимном усилии q потребную ширину шланга можно определить из вы-
ражения (4.13):
=
+ℎ.
Исходный диаметр шланга можно определить из условия равенства длин
исходной и деформированной поверхностей
ш
=2(−ℎ)+ℎ,
откуда
ш
=
2(−ℎ)
+ℎ,
где d
ш
— исходный внутренний диаметр шланга.
В качестве шланга обычно принимают стандартный прорезиненный по-
жарный рукав.
Шланговые прижимы благодаря большой площади, находящейся под
давлением, способны создать очень большие суммарные силы прижатия, по-
этому их, как правило, подключают к напорной пневмомагистрали через ре-
дукторы, понижающие давление.

68
4.4. Общая схема проектирования пневматических
прижимов
Общие правила проектирования пневмоприжимов рассмотрим на при-
мере прижима, предназначенного для одновременного поджатия в двух на-
правлениях какой-либо детали, например, уголка (рис. 4.16). Силовым эле-
ментом прижима является пневмоцилиндр с креплением на проушине. Пра-
вила проектирования прижима сводятся к следующему.
Вначале на прижимаемой детали выбирают точки приложения сил
прижатия (точки A и Q). Если требуется осуществить прижатие в двух на-
правлениях, то концевое звено рычажной системы необходимо выпол-
Рис. 4.16. Схема проектирования пневматических прижимов: а — прижатие
во внутренний угол; б — прижатие в наружный угол

69
нить в форме кулачка, шарнирно закрепленного на конце рычага. Для обес-
печения устойчивого равновесия рычажной системы точка поворота кулачка
должна быть выбрана следующим образом. При прижатии во внутренний
угол (рис. 4.16, а ) центр поворота кулачка должен находиться на линии дей-
ствия равнодействующей сил прижатия внутри угла, образованного векто-
рами сил. Если необходимо прижать деталь в наружный угол, то центр по-
ворота кулачка выбирают по схеме, показанной на рис. 4.16, б (на линии
действия равнодействующей сил прижатия).
Далее проектируют рычаг так, чтобы точка поворота рычага (мертвая
точка) была расположена на перпендикуляре, восстановленном к вектору
равнодействующей сил прижатия в точке поворота кулачка. Такое по-
ложение мертвой точки рычага позволит обеспечить требуемое направ-
ление равнодействующей. Затем выбирают направление оси пневмоци-
линдра при рабочем положении прижима. Желательно, чтобы эта ось бы-
ла перпендикулярна линии, соединяющей мертвую точку рычага с точкой
присоединения рычага к штоку цилиндра. Такое направление оси цилин-
дра позволяет получить наибольший размер плеча b и наиболее полно ис-
пользовать силу на штоке пневмоцилиндра.
Если конструктор не ограничен в выборе диаметра пневмоцилиндра,
то размеры плеч рычага а и b выбирают из конструктивных соображений
(удобство компоновки рычажной системы, стремление применить ци-
линдр меньшего диаметра и др.). Затем рассчитывают потребную силу на
штоке пневмоцилиндра:
Р
шт
=∙/,(4.14)
где Р
шт
— потребная сила на штоке пневмоцилиндра;
R — равнодействующая сил прижатия;
а, b — плечи сил соответственно R и Р
шт
.
После этого рассчитывают диаметр цилиндра. Если цилиндр работает в
толкающем режиме, то для расчета диаметра цилиндра воспользуемся вы-
ражением (25). После преобразования и подстановки постоянных величин
получим
=1,25
Р
шт
/ρ.
Если цилиндр работает в тянущем режиме, то, приняв приближенно со-
отношение между диаметрами цилиндра и штока в виде d = 0,25D, по выра-
жению (4.12) для силы на штоке цилиндра получим