Li S.Z., Jain A.K. (eds.) Encyclopedia of Biometrics
Подождите немного. Документ загружается.

federal legal proceedings (the citation is Daubert v.
Merrell Dow Pharmaceuticals, 509 U.S. 579).
▶ Gait, Forensic Evidence of
Daugman Algorithm
▶ Iris Encoding and Recognition using Gabo r
Wavelets
Dead Finger Detection
▶ Fingerprint Fake Detection
Decision
Decision is the output result of a biometric system
given a biometric sample. For a verification task, the
decision is ‘‘reject or accept’’ of the claimed identity,
while for identification task it is the identity of the
presented subject or rejecting him or her as one of
the enrolled subject.
▶ Performance Evaluation, Overview
Decision Criterion Adjustment
▶ Score Normalization Rules in Iris Recognition
Deformable Models
THOMAS ALBRECHT,MARCEL LU
¨
THI,THOMAS VETTE R
Computer Science Department, University of Basel,
Switzerland
Synonyms
Statistical Models; PCA (Principal Component Analysis);
Active (Contour, Shape, Appearance) Models; Morph-
able Models
Definition
The term Deformable Model describes a group of
computer algorithms and techniques widely used in
computer vision today. They all share the common
characteristic that they model the variability of a cer-
tain class of objects. In biometrics this could be the
class of all faces, hands, or eyes, etc. Tod ay, different
representations of the object classes are commonly
used. Earlier algorithms modeled shape variations
only. The shape, represented as curve or surface, is
deformed to match a specific example in the object
class. Later, the representations were extended to
model texture variations in the object classes as well
as imaging factors such as perspective projection and
illumination effects. For biometrics, deformable mod-
els are used for image analysis such as face recognition,
image segmentation, or classification. The image anal-
ysis is performe d by fitting the deformable model to a
novel image, thereby parametrizing the novel image in
terms of the known model.
Introduction
Deformable models denote a class of methods that
provide an abstract model of an object class [1]by
modeling separa tely the variability in shape, texture,
or imaging conditions of the objects in the class. In its
most basic form, deformable models represent the
shape of objects as a flexible 2D cur ve or a 3D surface
that can be deformed to match a particular instance of
that object class. The deformation a model can under-
go is not arbtitrary, but should satisfy some problem-
specific constraints. These constraints reflect the prior
210
D
Daugman Algorithm
knowledge about the object class to be modeled.
The key considerations are the way curves or surfaces
are represented and the different form of prior knowl-
edge to be incorporated. The different ways of repre-
senting the curves range from parametrized curves in
2D images, as in the first successful method introduced
as Snakes in 1988 [2], to 3D surface meshes in one of
the most sophisticated approaches, the 3D Morphable
Model (3DMM) [3], introduced in 1999. In the case
of Snakes, the requirement on the deformation is that
the final deformed curve should be sm ooth. In the
3DMM, statistical information about the object class
(e.g., such as the class of all faces) is used as prior
knowledge. In other words, the constraint states that
the deformed surface should with high probability
belong to a valid instance of the object class that is
modeled. The required probability distributions are
usually derived from a set of representative examples
of the class.
All algorithms for matching a deformation model
to a given data set are defined as an energy minimiza-
tion problem. Some measure of how well the deformed
model matches the data has to be minimized. We call
this the external energy that pushes the model to match
the data set as good as possible. At the same time the
internal energy, representing the prior knowledge,
has to be kept as low as possible. The internal energy
models the object’s resistance to be pushed by the
external force into directions not coherent with the
prior knowledge. The optimal solution constitutes
an equilibrium of internal and external forces. For
instance, in the case of Snakes, this means that a
contour is pushed to an image feature by the external
force while the contour itself exhibits resistance to be
deformed into a non-smooth curve. In the case of
the 3DMM, the internal forces become strong when
the object is deformed such that it does not belong
to the modeled object class.
This concept can be expressed in a formal frame-
work. In each of the algorithms, a model M has to be
deformed in order to best match a data set D. The
optimally matched model M
is sought as the mini-
mum of the energy functional E, which is comprised of
the external and internal energies E
ext
and E
int
:
E½M ¼ E
ext
½M; D þ E
int
½M ð1Þ
M
¼ arg min
M
E½M: ð2Þ
Snakes
Kaas et al. introduced Snakes, also known as the Active
Contour Model in their landmark paper [2]. Here, the
deformable model M is a parametrized curve and
the goal is to segment objects in an image D by fitting
the curve to object boundaries in the image.
The external energy E
ext
½M; D measures how well the
snake matches the boundaries in the image. It is
expressed in form of a feature image, for instance,
an edge image. If an edge image I with low values on
the edges of the image is used, the external energy is
given as:
E
ext
½M; D ¼ E
ext
½v; I¼
Z
1
0
IðvðsÞÞds; ð3Þ
where v : [0,1] !IR
2
is a suitable parametrization
of the curve M and I :IR
2
!IR is the edge image of
the input image D. If a point v ( s) of the curve lies on
a boundary, the value of the edge image I(v(s)) at this
point is low. Therefore, the extern al energy is mini-
mized if the curve comes to lie completely on a bound-
ary of an image.
The internal energy ensures that the curve always
remains a smooth curve. For the classical snakes for-
mulation, it is defined as the spline bending energy of
the curve:
E
int
½M ¼ E
int
½v¼ðaðsÞjv
0
ðsÞj
2
þ bðsÞjv
00
ðsÞj
2
Þ=2;
ð4Þ
where a and b control the weight of the first and
second derivative terms.
By finding a minimum of the combined functio nal
E½M, the aim is to find a smooth curve M, which
matches the edges of the image and thereby segments
the objects present in the image.
The Snake methodolog y is the foundation for
a large number of methods based on the same
framework. There are three main lines of
development:
Flexible representation of curves and surfaces
Incorporation of problem specific prior know-
ledge from examples of the same object class
Use of texture to complement the shape
information
Deformable Models
D
211
D
Level Set Representation for Curves
and Surfaces
The idea of snakes was to represent the curve M as a
parametric curve. While such a representation is simple,
it is topologically rigid, i.e., it cannot represent objects
that are comprised of a variable number of independent
parts. Caselles et al. [4] proposed to represent the curve
M as a level set, i.e., the contour is represented as the
zero level set of an auxiliary function f:
M¼ff ¼ 0g: ð5Þ
A typical choice for f is the distance function to the
model M.
This representation offers more topological flexi-
bility, because contours represented by level sets can
break apart or join without the need of reparametri-
zation. Additionally, the level set formulation allows
a treatment of surfaces and images in any dimension,
without the need of reformulating the methods or algo-
rithms. The idea of representing a surface by a level-set
has led to a powerful framework for image segmenta-
tion, which is referred to as level-set segmentation.
Example Based Shape Priors
Before the introduction of Active Shape Models [5],
the internal energy or prior knowledge of the Deform-
able Model has been very generic. Independent of the
object class under consideration, the only prior knowl-
edge imposed was a smoothnes s constraint on the
deformed model. Active Shape Models or ‘‘Smart
Snakes’’ and the 3DMM [3] incorporate more specific
prior knowledge about the object class by learning the
typical shapes of the class.
The main idea of these methods is to assume that
all shapes in the object class are distributed according
to a multivariate normal distribution. Let a representa-
tive training set of shapes M
1
; ...; M
m
, all belonging
to the same object class be given. Each shape M
i
is
represented by a vector x
i
containing the coordinates of
a set of points. For 2D points (x
j
, y
j
), such a vector x
takes the form x ¼ðx
1
; y
1
; ...; x
n
; y
n
Þ: For the result-
ing example vectors x
1
,...,x
m
, we can estimate the
mean
x and covariance matrix S. Thus, the shapes
are assumed to be distributed according to the multi-
variate normal distribution Nð
x; SÞ. To conveniently
handle this normal distribution, its main modes of
variation, which are the eigenvectors of S, are cal-
culated via
▶ Principal Components Analysis (PCA)
[6]. The corresponding eigenvalues measure the ob-
served variance in the direction of an eigenvector.
Only the first k most significant eigenvectors v
1
,...,v
k
corresponding to the largest eigenvalues are used, and
each shape is modeled as:
x ¼
x þ
X
k
i¼1
a
i
v
i
; ð6Þ
with a
i
2IR. In this way, the prior knowledge about the
object class, represented by the estimated normal dis-
tribution Nð
x; SÞ, is used to define the internal energy.
Indeed, looking at Equation (6), we see that the shape
can only be deformed by the principal modes of varia-
tion of the training examples.
Furthermore, the coefficients a
i
are usually con-
strained, such that deformations in the direction of v
i
are not much larger than those observed in the training
data. For the Active Shape Model, this is achieved by
introducing a threshold D
max
on the mean squares of
the coefficients a
i
, scaled by the corresponding stan-
dard deviation s
i
of the training data. The internal
force of the Active Shape Model is given by :
E
int
½M ¼ E
int
½a
1
; ...; a
k
¼
0if
P
k
i¼1
ð
a
i
s
i
Þ
2
D
max
1 else:
(
ð7Þ
In contrast, the 3DMM [3] does not strictly constrain
the size of these coefficients. Rather, the assumed mul-
tivariate normal distributions Nð
x; SÞ is used to
model the internal energy of a deformed model M as
the probability of obser ving this model in the normally
distributed object class:
E
int
½M ¼ E
int
½a¼ln PðaÞ
¼ln e
1
2
X
k
i¼1
ða
i
=s
i
Þ
2
¼
1
2
X
k
i¼1
ða
i
=s
i
Þ
2
:
ð8Þ
Correspondence and Registration
All deformable models using prior knowledge in form
of statistical information presented here assume the
212
D
Deformable Models
example data sets to be in correspondence. All objects
are labeled by the same number of points and
cor responding points always label the same part of
the object. For instance in a shape model of a han d, a
given point could always label the tip of the index
finger in all the examples. Without this correspon-
dence assumption, the resulting statistics would not
capture the variability of features of the object but
only the deviations of the coordinates of the sampled
points. The task of bringing a set of examples of the
same object class into correspondence is known as the
Registration Problem and constitutes another large
group of algorithms in computer vision.
Incorporating Texture Information
One limitation of the classical Snake model is that the
information of the data set D is only evaluated at
contour points of the model M. In level-set
▶ segmen-
tation, new external energy terms have been intro-
duced in [7, 8]. Instead of measuring the goodness of
fit only by the values of the curve M on a feature
image, in these new approaches the distance between
the original image and an approximation defined by
the segmentation is calculated. Typical approximations
are images with constant or smoothly varying values
on the segments. This amounts to incorporating the
prior knowledge that the appearance or texture of the
shape outlined by the deformable model is constant or
smooth.
By incorporating more specific prior knowledge
about the object class under consideration, the appear-
ance or texture can be modeled much more precisely.
This can be done in a similar fashion to the shape
modeling described in the previous section. The ap-
pearance or texture T of a model M is represented by
a vector T. All such vectors belonging to a specific
object class are assumed to be normally distributed.
For instance, it is assumed that the texture images of all
faces can be modeled by a multivariate normal distri-
bution. Similar to the shapes, these texture vectors
need to be in correspondence in order to permit a
meaningful statistical analysis.
Given m example textures T
1
,...,T
m
, which are in
correspondence, their mean
T, covariance matrix S
T
,
main modes of variation t
1
,...,t
k
, and eigenvalues r
i
can be calculated. Thus, the multivariate normal
distribution Nð
T; S
T
Þ can be used to model all tex-
tures of the object class, which are then represented as:
T ¼
T þ
X
k
i¼1
b
i
t
i
: ð9Þ
A constraint on the coefficients b
i
analogous to Equa-
tion (7)or(8) is used to ensure that the model texture
stays in the range of the example textures. In this
way, not only the outline or shape of an object from
the object class but also its appearance or texture can
be modeled. The Active Appearance Models [1, 9, 10]
and the 3D Morphable Model [3 ] both use a combined
model of shape and texture to model a specific object
class. A complete object is modeled as a shape given
by Equation (6) with texture given by Equation (9).
The model’s shape and texture are deformed by choos-
ing the shape and texture coefficients a¼(a
1
,...,a
k
)
and b¼(b
1
,...,b
k
). The external energy of the model is
defined by the distance between the input data set D
and the modeled objec t ( S,T), measured with a dis-
tance measure which not only takes the difference in
shape but also that in texture into account. The inter-
nal energy is given by Equation (7)or(8) and the
analogous equation for the b
i
.
2D versus 3D Representation
While the mathematical formalism describing all pre-
viously introduced models is independent of the di-
mensionality of the data, historically the Active
Contour, Shape, and Appearance Models were only
used on 2D images, whereas the 3DMM was the first
model to model an object class in 3D. The main differ-
ence between 2D and 3D modeling is in the expressive
power and the difficulty of building the deformable
models. Deformable models, when incorporating prior
knowledge on the objects class, are derived from a set
of examples of this class. In the 2D case these examples
are usually registered images showing different
instances of the class. Similarly, 3D models require
registered 3D examples. As an additional difficulty,
3D examples can only be obtained with a complex
scanning technology, e.g., CT, MRI, laser, or structured
light scanners. Additionally, when applied to images
the 3D models require a detailed model for the imag-
ing process such as the simulation of occlusions, per-
spective, or the effects of variable illumination.
Deformable Models
D
213
D
While building 3D models might be difficult, 3D
models naturally offer a better separation of object
specific parameters from parameters such as pose and
illumination that orig inate in the specific imaging
parameters. For 2D mode ls these parameters are often
extremely difficult to separate. For instance, with a 2D
model, 3D pose changes can only be modeled by shape
parameters. Similarly, 3D illumination effects are mod-
eled by texture variations.
Applications
Deformable Models have found a wide range of appli-
cations in many fields of computer science. For
biometrics, the most obvious and well-researched
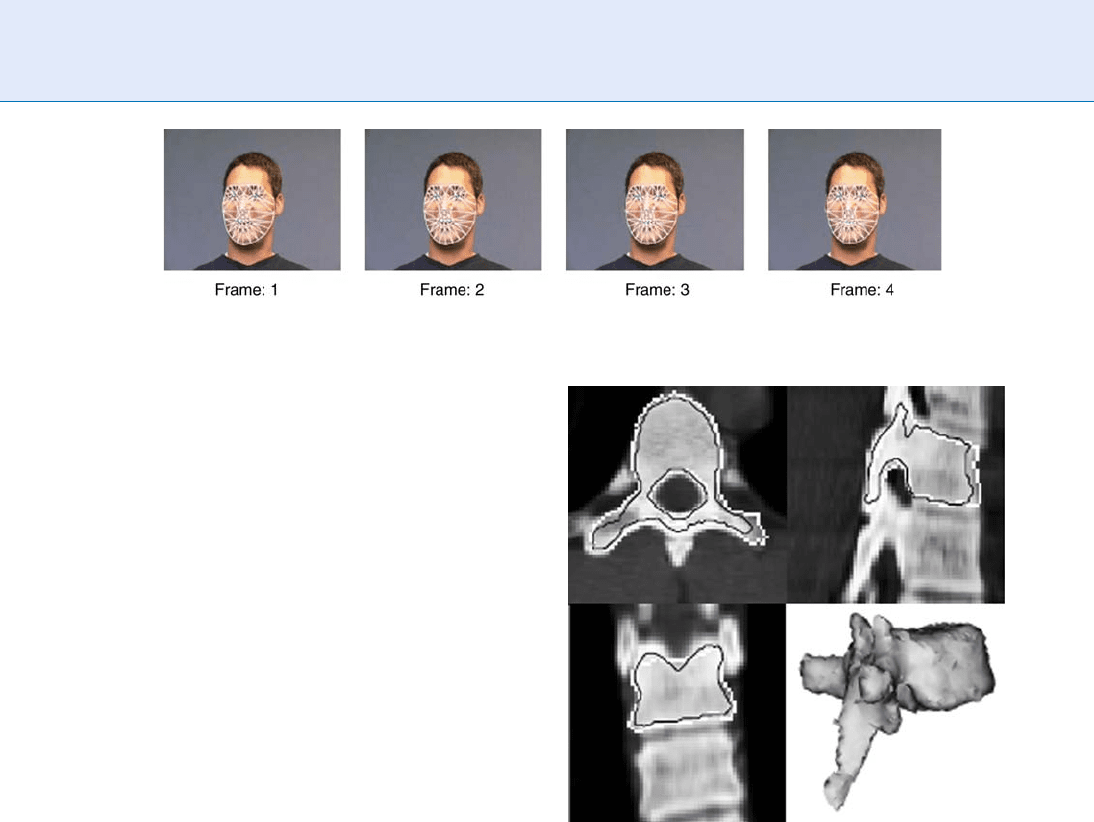
applications are certainly face tracking ([10], Fig. 1)
and face recognition, [11]. For face recognition, the
fact is exploited that an individual face is represented
by its shape and texture coefficients. Faces can be
compared for recognition or verification by comparing
these coefficients.
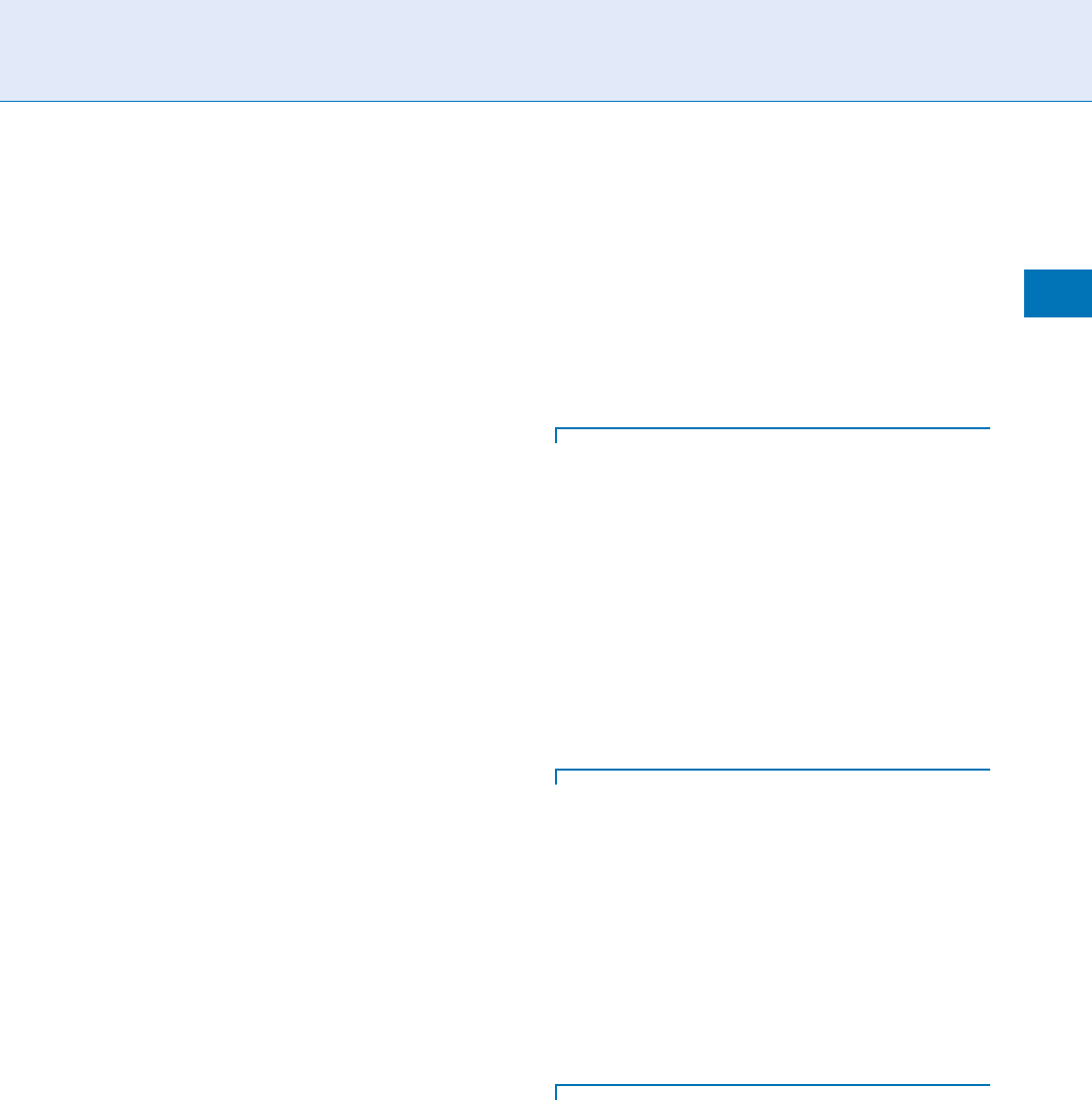
Another important area in which Deformable
Models have found application is in medical image
analysis, most importantly medical image segmenta-
tion, ([12], Fig. 2).
Recent Developments
While the level-set methods allow for greater topologi-
cal flexibility, the Active Appearance Model and
the 3DMM in turn provide an internal energy term
representing prior knowledge about the object class.
It is natural to combine the advantages of all these
methods by using the level-set representation and its
resulting external energy term together with the inter-
nal energy term incorporating statistical prior knowl-
edge. In [12], Leventon et al. propose such a method
that relies on the level-set representation of snakes
introduced by Caselles et al. [4]. The internal energy
is given by statistical prior knowledge computed di-
rectly from a set of level-set functions (distance func-
tions) representing the curves using a standard PCA
approach.
Summary
Deformable models provide a versatile and flexible
framework for representing a certain class of objects
by specifying a model of the object together with
its variations. The variations are obtained by deform-
ing the model in accordance to problem specific
constraints the deformation has to fulfill. These
Deformable Models. Figure 1 Tracking a face with the active appearance model. Image from [10].
Deformable Models. Figure 2 3D level set segmentation
with shape prior of a vertebrae. Image from [12].
(ß 2000 IEEE).
214
D
Deformable Models
constraints represent the prior knowledge about the
object and can range from simple smoothness assump-
tion on the deformed object to the requirement
that the resulting object still belongs to the same object
class. The analysis of novel objects is done by fitting
the deformable model to characteristics of a new
object. The fitting ranges from simple approaches of
matching the object’s boundar y in an image, to opti-
mally matching the object’s full texture. Because of
their flexibility, deformable models are used for many
applications in biometrics and the related fields of
computer vision and medical image analysis. Among
others, the most successful use of these models are
in automatic segmentation and image analysis and
synthesis [3].
Related Entries
▶ Active (Contour, Shape, Appearance) Models
▶ Face Alignment
▶ Face Recognition, Over view
▶ Image Pattern Recognition
References
1. Vetter, T., Poggio, T.: Linear object classes and image synthesis
from a single example image. IEEE Trans. Pattern Anal. Mach.
Intell. 19(7), 733–742 (1997)
2. Kass, M., Witkin, A., Terzopoulos, D.: Snakes: Active contour
models. Int. J. Comput. Vis. 1(4), 321–331 (1988)
3. Blanz, V., Vetter, T.: A morphable model for the synthesis of 3d
faces. In: SIGGRAPH ’99: Proceedings of the 26th annual con-
ference on Computer graphics and interactive techniques, pp.
187–194. ACM Press (1999). DOI http://doi.acm.org/10.1145/
311535.311556
4. Caselles, V., Kimmel, R., Sapiro, G.: Geodesic Active Contours.
Int. J. Comput. Vis. 22(1), 61–79 (1997)
5. Cootes, T., Taylor, C.: Active shape models-’smart snakes’. In:
Proceedings British Machine Vision Conference, pp. 266–275
(1992)
6. Bishop, C.: Pattern recognition and machine learning. Springer
(2006)
7. Chan, T.F., Vese, L.A.: Active contours without edges. IEEE
Trans. Image Process. 10(2), 266–277 (2001)
8. Mumford, D., Shah, J., for Intelligent Control Systems (US, C.:
Optimal Approximations by Piecewise Smooth Functions and
Associated Variational Problems. Center for Intelligent Control
Systems (1988)
9. Cootes, T., Edwards, G., Taylor, C.: Active appearance models.
IEEE Trans. Pattern Anal. Mach. Intell. 23(6), 681–685 (2001)
10. Matthews, I., Baker, S.: Active Appearance Models Revisited. Int.
J. Comput. Vis. 60(2), 135–164 (2004)
11. Blanz, V., Vetter, T.: Face recognition based on fitting a 3 D
morphable model. IEEE Trans. Pattern Anal. Mach. Intell.
25(9), 1063–1074 (2003)
12. Leventon, M.E., Grimson, W.E.L., Faugeras, O.: Statistical shape
influence in geodesic active contours. IEEE Comput. Soc. Conf.
Comput. Vis. Pattern Recogn. 1, 1316 (2000). DOI http://doi.
ieeecomputersociety.org/10.1109/CVPR.2000.855835
Deformation
Since expressions are common in faces, robust face
tracking methods should be able to perform well
inspite of large facial expressions. Also, many face
trackers are able to estimate the expression.
▶ Face Tracking
Delta
The point on a ridge at or nearest to the point of
divergence of two type lines, and located at or directly
in front of the point of divergence.
▶ Fingerprint Templates
Demisyllables
A demisyllable brackets exactly one syllable-to-syllable
transition. Demisyllable boundaries are positioned
during the stationary portion of the vowel where
there is minimal coarticulation. For general American
English, a minimum of 2,500 demisyllables are
necessary.
▶ Voice Sample Synthesis
Demisyllables
D
215
D
Dental Biometrics
HONG CHEN,ANIL K. JAIN
Michigan State University, East Lansing, MI, USA
Synonyms
Dental identification; Forensic Identification Based on
Dental Radiographs; Tooth Biometrics
Definition
Dental biometrics uses information about dental
structures to automatically identify human remains.
The methodology is mainly applied to the identifi-
cation of victims of massive disasters. The process of
dental identification consists in measuring dental fea-
tures, labeling individual teeth with tooth indices, and
the matching of dental features. Dental radiographs are
the major source for obtaining dental features. Com-
monly used dental features are based on tooth mor-
phology (shape) and appearance ( gray level).
Motivation
The significance of automatic dental identification
became evident after recent disasters, such as the 9/11
terrorist attack in the United States in 2001 and the
Asian tsunami in 2004. The victims’ bodies were seriously
damaged and decomposed due to fire, water, and other
environmental factors. As a result, in man y cases, com-
mon biometric traits, e.g., fingerprints and faces, were not
available. Therefore dental features may be the only clue
for identification. After the 9/11 attack, about 20% of the
973 victims identified in the first year were identified
using dental biometrics [1]. About 75% of the 2004
Asian tsunami victims in Thailand were identified
using dental records [2]. Table 1 gives a comparison
between dental biometrics and other victim identifica-
tion approaches, i.e.,
▶ circumstantial identification,
external identification, internal identification, and
▶ genetic identification [3]. The number of victims
to be identified based on dental biometrics is often
very large in disaster scenarios, but the traditional
manual identification based on forensic odontology
is time consuming. For example, the number of Asian
tsunami victims identified during the first 9 months
was only 2,200 (out of an estimated total of 190,000
victims) [2]. The low efficiency of manual methods for
dental identification makes it imperative to develop auto-
matic methods for matching dental records [4, 5].
Dental Information
Dental information includes the number of teeth, tooth
orientation, and shape of dental restorations, etc.
This information is recorded in dental codes, which
are symbolic strings, describing types and positions of
dental restorations, presence or absence of each tooth,
and number of cusps in teeth, etc. Adams concluded
from his analysis [7] that when adequate antemortem
(AM) dental codes are available for comparison with
postmortem (PM) dental codes, the inherent variability
of the human dentition could accurately establish iden-
tity with a high degree of confidence. Dental codes are
entered by forensic odontologists after carefully
reading dental radiographs. Dental radiographs, also
called dental X-rays, are X-ray images of dentition.
Compared to dental codes, dental radiographs contain
richer information for identification, and, therefore,
are the most commonly used source of information
for dental identification.
Dental Biometrics. Table 1 A comparison of evidence types used in victim identification [6]
Physical
Identification approach Circumstantial External Internal Dental Genetic
Accuracy Med. High Low High High
Time for identification Short Short Long Short Long
Antemortem record availability High Med. Low Med. High
Robustness to decomposition Med. Low Low High Med.
Instrument requirement Low Med. High Med. High
216
D
Dental Biometrics
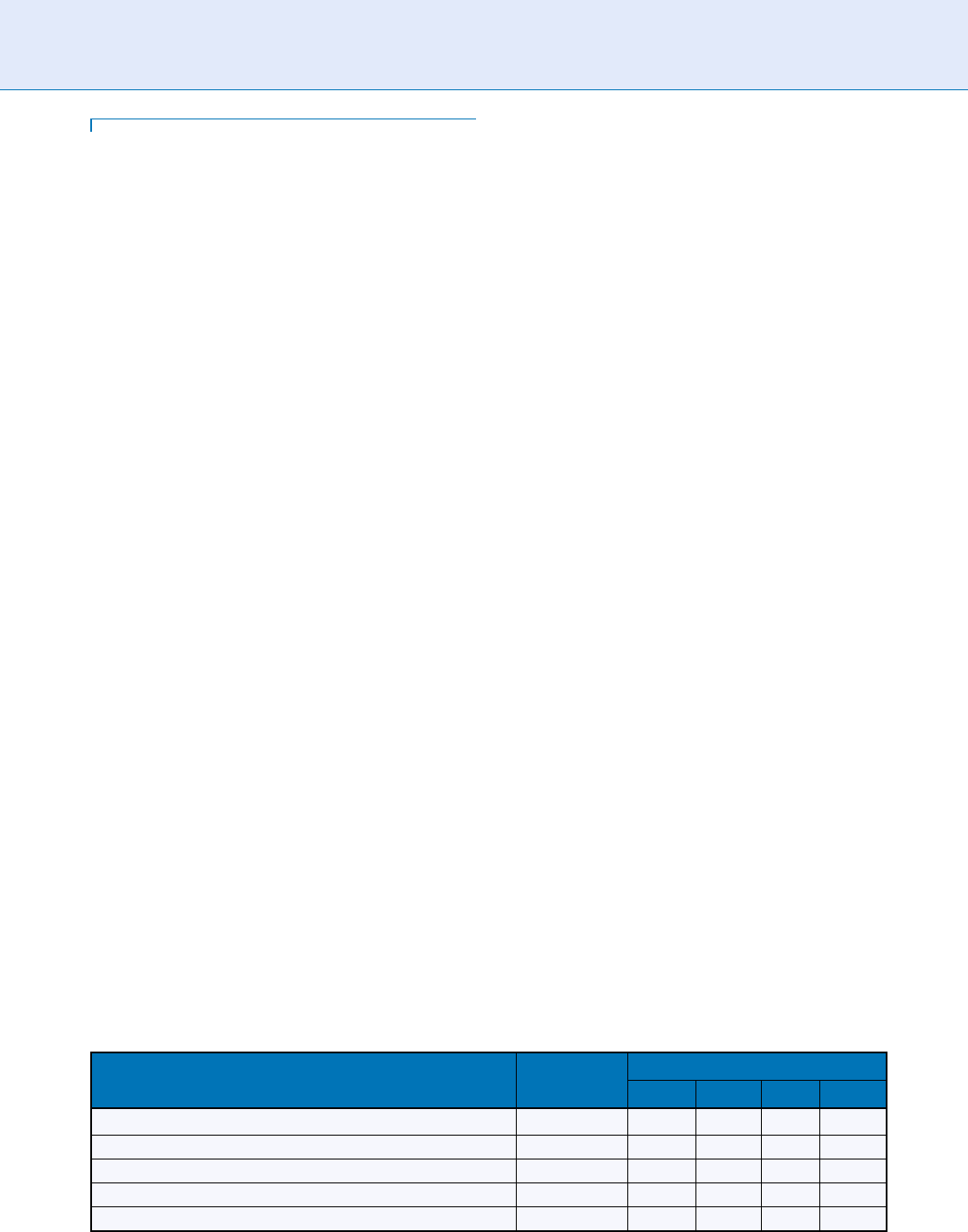
There are three common t ypes of den tal radio-
graphs: periapical, bitewing, and panoramic. Periapical
X-rays (Fig. 1a) show the entire tooth, including
the crown, root, and the bone surrounding the root.
Bitewing X-rays (Fig. 1b) show both upper and lower
rows of teeth. Panoramic X-rays (Fig. 1c) give a broad
overview of the entire dentiti on (the development of
teeth and their arrangement in the mouth), providing
information not only about the teeth, but also about
upper and lower jawbones, sinuses, and other tissues
in head and neck. Digital radiographs will be used for
victim identification in future due to their advantages
in speed, storage, and image qualit y.
Antemortem Dental Records
Forensic identification of humans based on dental in-
formation requires the availability of antemortem den-
tal records. The discovery and collection of antemortem
records is ordinarily the responsibility of investigative
agencies. Antemortem dental radiographs are usually
available from dental clinics, oral surgeons, orthodon-
tists, hospitals, military service, insurance carriers, and
the FBI National Crime Information Center (NCIC).
Automatic Dental Identification
System
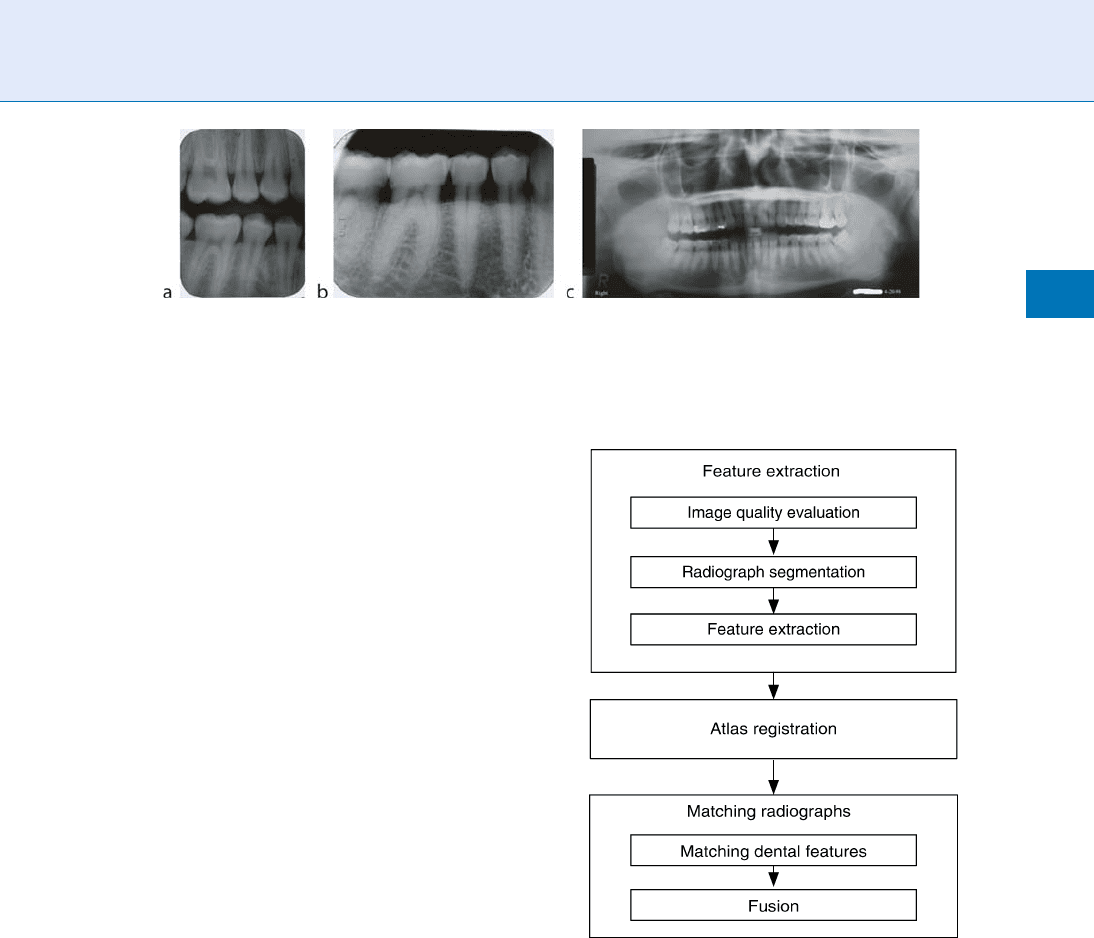
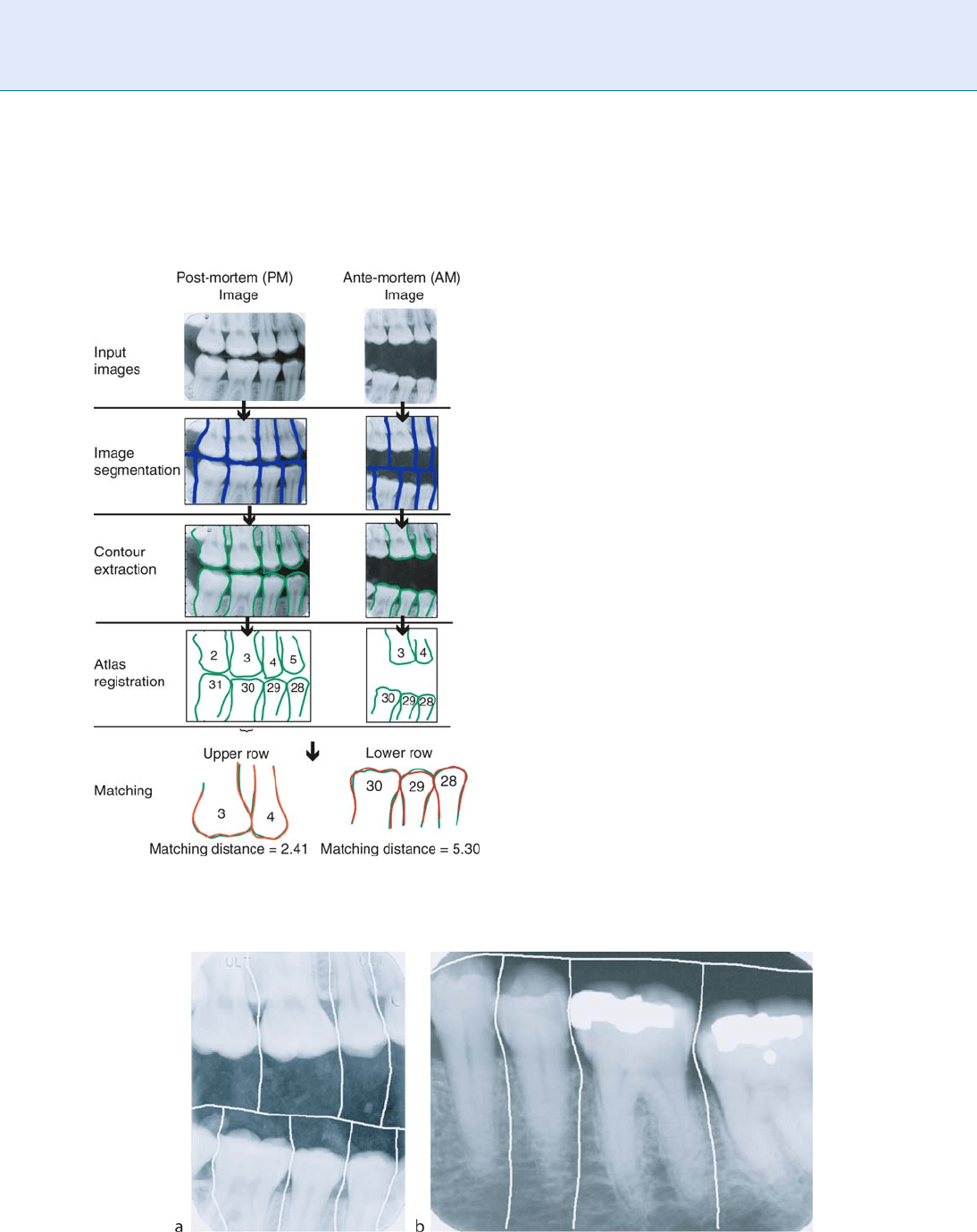
Figure 2 shows the system diagram of an automatic
dental identification system [6 ]. The system consists
of three steps: extraction of features, registration of
dentition to a dental atlas, and matching dental fea-
tures. The first step involves image quality evaluation,
segmentation of radiographs, and extraction of dental
information from each tooth. The second step labels
teeth in dental radiog raphs so that only the cor-
responding teeth are matched in the matching stage.
Dental features extracted from PM and AM images are
matched in the third step. For many victims that need
to be identified, several AM and PM dental radiographs
are available. Therefore, there can be more than one
pair of corresponding teeth. In such cases, the matching
step also fuses matching scores for all pairs of cor-
responding teeth to generate an overall matching
score between the AM and PM images. Figure 3
shows the process of matching a pair of AM and PM
dental radiographs.
Dental Biometrics. Figure 1 Three types of dental radiographs. (a) A bitewing radiograph; (b) a periapical radiograph;
(c) a panoramic radiograph.
Dental Biometrics. Figure 2 Block diagram of automatic
dental identification system.
Dental Biometrics
D
217
D
Feature Extraction
The first step in processing dental radiographs is to
segment dental radiographs into regions, each contain-
ing only one tooth. Segmentation of dental radiographs
uses Fast Marching algorithm [8] or integral projection
[9, 10]. Figure 4 shows examples of successful radio-
graph segmentation by the Fast Marching algorithm.
Due to the degradation of X-ray films over time as well
as image capture in field env ironments, AM and PM
radiographs are often of poor quality, leading to seg-
mentation errors. To prevent propagation of errors in
segmentation, an image quality evaluation module is
introduced [6]. If the estimated image quality is poor,
an alert is triggered to get human experts involved dur-
ing segmentation.
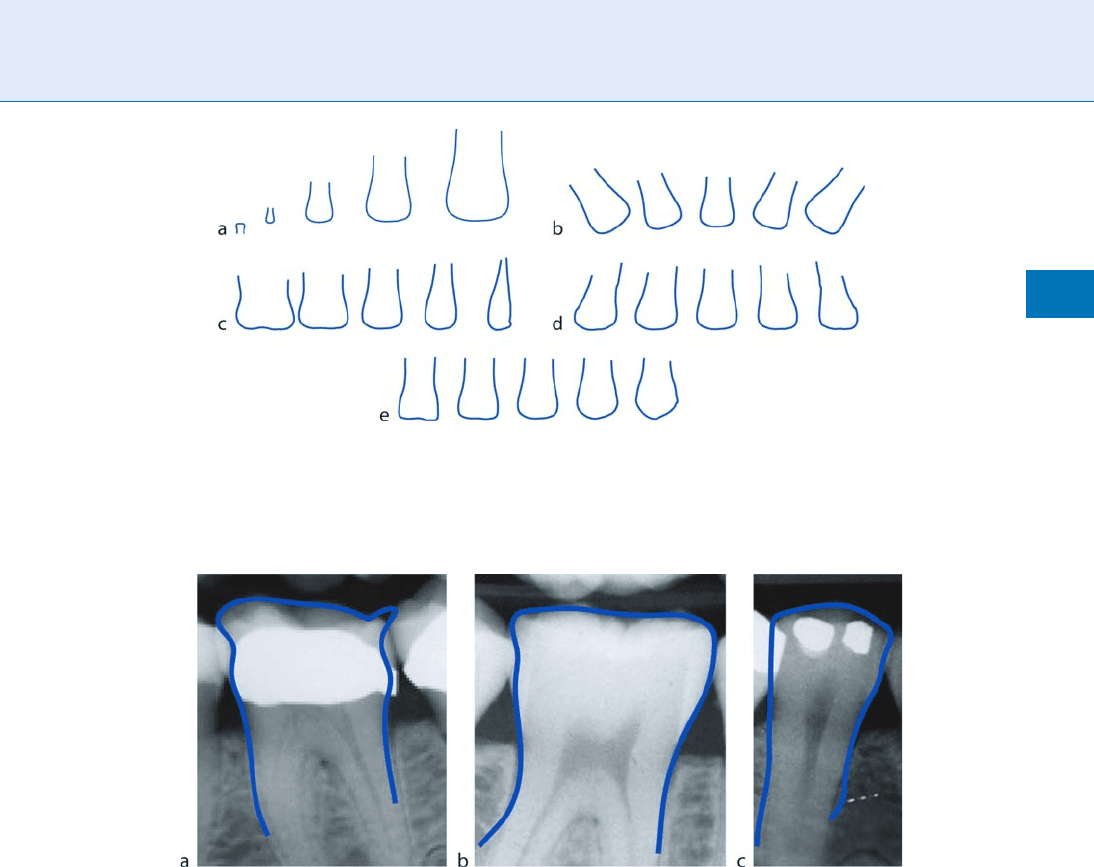
Dental features are extracted from each tooth. The
most commonly used features are the contours of teeth
and the contours of dental work. Active shape models
are used to extract eigen-shapes from aligned training
tooth contours [6]. Figure 5 shows the five most prin-
cipal deformation modes of teeth, which, respectively,
represent scaling, rotation, variations in tooth width,
variations in tooth orientation, and variations in
shapes of tooth root and crown. Figure 6 shows some
extracted contours. Anisotropic diffusion is used to
enhance radiograph images and segment regions of
dental work (including crowns, fillings, and root canal
treatment, etc.) [9]. Thresholding is used to extract the
boundaries of dental work (Fig. 7).
Atlas Registration
The second step is to register individual teeth segmented
in radiographs to a
▶ human dental atlas (Fig. 8). This
allows for labeling the teeth with tooth indices. Nomir
and Abdel-Mottaleb [11] proposed to form a symbolic
string by concatenating classification results of the
teeth and match the string against known patterns of
Dental Biometrics. Figure 3 Matching a pair of PM and
AM images.
Dental Biometrics. Figure 4 Some examples of correct segmentation.
218
D
Dental Biometrics
tooth arrangement to find out tooth indices. To hand le
classification errors and missing teeth, Chen and Jain
[12] proposed a hybrid model composed of Support
Vector Machines (SVMs) and a Hidden Markov Model
(HMM) (Fig. 9). The HMM serves as an underlying
representation of the dental atlas, with HMM states
representing teeth and distances between neighboring
teeth. The SVMs classify the teeth into three classes
based on their contours. Tooth indices, as well as
Missing teeth, can be detected by registering the ob-
served tooth shapes and the distances between adjacent
teeth to the hybrid model. Furthermore, instead of
simply assigning a class label to each tooth, the hybrid
model assigns a probability of correct detection to
possible indices of each tooth. The tooth indices with
the highest probabilities are used in the matching
stage. Figure 10 shows some examples of tooth index
estimation.
Matching
For matching the corresponding teeth from PM and
AM radiographs, the tooth contours are registered
using scaling and a rigid transformation, and corres-
ponding contour points are located for calculating the
distance between the contours [9]. If dental work is
present in both the teeth, the regions of dental work are
also matched to calculate the distance between dental
work. The matching distance between tooth contours
and between dental work contours are fused to generate
the distance between the tw o teeth [9]. Given the match-
ing distances between individual pairs of teeth, the
matching distance between two dental radiographs is
computed as the average distance of all the corresponding
teethinthem.Thedistancebetweenthequeryanda
record in the database is calculated based on the dis-
tance between all the available dental radiographs in the
Dental Biometrics. Figure 5 First five modes of the shape model of teeth. The middle shape in each image is the mean
shape, while the other four shapes are, from left to right, mean shape plus four eigenvectors multiplied by 2, 1, 1,
and 2 times the square root of the corresponding eigenvalues.
Dental Biometrics. Figure 6 Tooth shapes extracted using Active Shape Models.
Dental Biometrics
D
219
D