Лекции - Управление системами и процессами
Подождите немного. Документ загружается.

УТВЕРЖДАЮ:
Зав. кафедрой ОМ____________
В.Ф. Пегашкин
14. 08. 2007.
КОНСПЕКТ ЛЕКЦИЙ
Дисциплина___Управление системами и процессами__________________
Составитель доцент кафедры ОМ
Боршова Л. В.
1
ОГЛАВЛЕНИЕ
1. СИСТЕМЫ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКАМИ......................................................3
1.1. Структура систем ЧПУ........................................................................................................................................3
1.2. Классификация устройств ЧПУ.......................................................................................................................11
2. ЗАДАЧИ УПРАВЛЕНИЯ............................................................................................................................................22
2.1. Геометрическая задача управления................................................................................................................22
2.2. Логическая задача управления........................................................................................................................26
2.3. Терминальная задача управления...................................................................................................................28
2.4. Диагностическая задача управления..............................................................................................................29
2.5. Программируемые контроллеры.....................................................................................................................30
2.6. Системы типа РСNC...........................................................................................................................................31
3. СИСТЕМА КООРДИНАТ СТАНКА, ДЕТАЛИ, ИНСТРУМЕНТА........................................................................33
3.1. Система координат станка.................................................................................................................................33
3.2. Система координат детали...................................................................................................................................40
3.3. Система координат инструмента.....................................................................................................................40
3.4. Связь систем координат......................................................................................................................................42
4. РАЗРАБОТКА РАСЧЕТНО-ТЕХНОЛОГИЧЕСКОЙ КАРТЫ (РТК).....................................................................49
5. ОСОБЕННОСТИ РАСЧЕТА ТРАЕКТОРИЙ ИНСТРУМЕНТА.............................................................................52
6. РАСЧЕТ ЭЛЕМЕНТОВ КОНТУРА ДЕТАЛИ И ЭЛЕМЕНТОВ ТРАЕКТОРИИ ИНСТРУМЕНТА.....................57
6.1. Представление траектории обработки............................................................................................................57
7. РАЗРАБОТКА, ОТЛАДКА И КОРРЕКТИРОВАНИЕ УПРАВЛЯЮЩИХ ПРОГРАММ......................................66
7.1. Разработка управляющих программ...............................................................................................................66
7.2. Отладка и корректирование программ..........................................................................................................77
Библиографический список рекомендуемой литературы............................................................................................80
2
1. СИСТЕМЫ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ
СТАНКАМИ
1.1. Структура систем ЧПУ
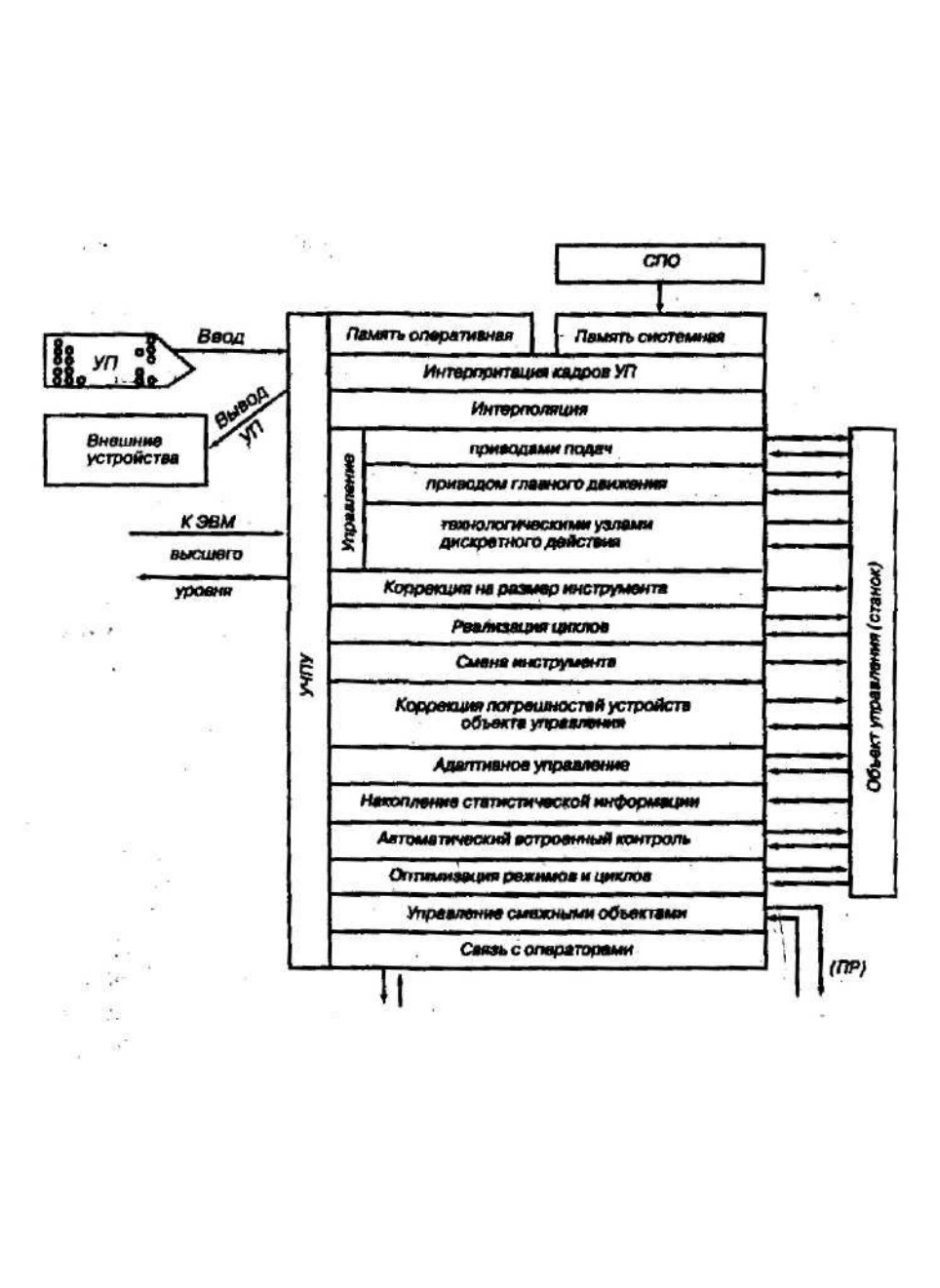
В общем виде структуру комплекса «Станок с ЧПУ» можно представить в
виде трех блоков, каждый из которых выполняет свою задачу: управляющая
программа (УП), устройство ЧПУ (УЧПУ) и собственно станок (рис.1.1).
Рис. 1.1. Функциональная схема управления станком с ЧПУ
3

КОМПЛЕКС «СТАНОК С ЧПУ»
Все блоки комплекса работают взаимосвязано в единой структуре.
Управляющая программа содержит укрупненное кодированное описание всех
стадий геометрического и технологического образования изделия. Это описание не
должно допускать двусмысленных трактований. В устройстве ЧПУ управляющая
информация в соответствии с УП транслируется, а затем используется в
вычислительном цикле. Результатом является формирование оперативных команд
в реальном масштабе машинного времени станка.
Станок является основным потребителем управляющей информации,
исполнительной частью, объектом управления, а в конструктивном отношении
— несущей конструкцией, на которой смонтированы механизмы с
автоматическим управлением, приспособленные к приему оперативных команд
от УЧПУ. К числу подобных механизмов относятся, прежде всего, те, которые
непосредственно участвуют в геометрическом формообразовании изделия. В
зависимости от числа координат движений, задаваемых механизмами подачи,
складывается система координат обработки. Система координат может быть
плоская, пространственная трехмерная, пространственная многомерная.
Функциональность реальной системы ЧПУ (СЧПУ) определяется степенью
реализации целого ряда функций при управлении оборудованием. Рассмотрим
краткую характеристику этих функций.
Ввод и хранение системного программного обеспечения (СПО). К
СПО относят совокупность программ, отражающих алгоритмы
функционирования конкретного объекта. В УЧПУ низших классов СПО
заложено конструктивно и не может быть изменено, и УЧПУ может управлять
лишь данным объектом (например, только станками токарной группы с двумя
координатами). В многоцелевых системах, обеспечивающих управление
широким классом объектов, при настройке СЧПУ для решения определенного
круга задач СПО вводится извне. Это необходимо, поскольку у разных
объектов существуют различия в алгоритмах формообразования по числу
4

координат управления, скоростям и ускорениям движения инструмента.
Разнообразие типов приводов и состава технологических команд объектов ведет
к различиям в количестве и характере сигналов обмена.
В автономных многоцелевых устройствах управления СПО вводится с
перфоленты, с дискеты, с компакт-диска (CD), а в автоматизированных
устройствах (в составе АСУ ТП, ГАП,) — по каналу связи с ЭВМ верхнего
уровня. Естественно, что СПО хранится в памяти системы до тех пор, пока не
меняется объект управления. При замене объекта управления (например, вместо
токарного станка к СЧПУ подключается промышленный робот) необходим ввод в
СЧПУ новых программ (СПО), которые определили бы алгоритмы
функционирования этого нового объекта.
Необходимо различать СПО и управляющие программы: СПО остается
неизменным для данного объекта управления, а УП изменяются при
изготовлении разных деталей на одном и том же объекте. В многоцелевых СЧПУ
память для хранения СПО должна быть энергонезависимой, т.е. сохранять
информацию при пропадании напряжения питающей сети.
Ввод и хранение УП. Управляющая программа может вводиться в СЧПУ с
пульта управления, с дискеты или по каналам связи с ЭВМ высшего уровня.
Память для хранения УП, которая обычно представляется в коде ИСО, должна
быть энергонезависимой. В СЧПУ высших классов УП обычно вводится сразу и
целиком и запоминается в оперативной памяти системы. Мощные
компьютерные УЧПУ позволяют записывать и хранить большое количество
УП в памяти своей ЭВМ.
Интерпретация кадра. Управляющая программа состоит из составных
частей — кадров. Отработка очередного кадра требует проведения ряда
предварительных процедур, называемых интерпретацией кадра. Для
непрерывности контурного управления процедуры интерпретации i + 1-го кадра
должны быть реализованы во время управления объектом по i-му кадру. Иначе
говоря, система управления должна быть готова к немедленной (без перерывов
на чтение и распознавание кадров) выдаче команд управления в соответствии с
5

командами последующего кадра после исполнения команд, заложенных в кадре
текущем.
Интерполяция. СЧПУ должна обеспечить с требуемой точностью
автоматическое получение (расчет) координат промежуточных точек траектории
движения элементов управляемого объекта по координатам крайних точек и
заданной функции интерполяции.
Управление приводами подач. Сложность управления зависит от типа
привода. В общем случае задача сводится к организации цифровых позиционных
следящих систем для каждой координаты. На вход такой системы поступают
коды (код), соответствующие результатам интерполяции. Этим кодам должно
отвечать положение по координате (линейное или угловое) перемещающегося
объекта. Определение действительного положения перемещающегося объекта и
сообщение о нем в систему управления осуществляются датчиками обратной
связи. Кроме управления в режиме движения по заданной траектории необходима
организация и некоторых вспомогательных режимов: согласование системы
управления приводами с истинным положением датчиков обратной связи,
установка системы приводов в фиксированный нуль станка, контроль выхода за
допустимые значения координат, автоматический выход приводов в режим
торможения по определенным законам и др.
Управление приводом главного движения. Управление предусматривает
включение и отключение привода, стабилизацию скорости, а в некоторых
случаях — управление углом поворота как дополнительной координатой.
Логическое управление. Это управление технологическими узлами
дискретного действия, входные сигналы которых производят операции типа
«включить», «отключить», а выходные фиксируют состояния «включено»,
«отключено». В последнее время появились УЧПУ высочайшего уровня,
обладающие свойствами нестандартной логики, своего рода высоким
интеллектуальным уровнем.
Коррекция на размеры инструмента. Коррекция УП на длину
инструмента сводится к параллельному переносу координат, т.е. смещению. Учет
6

фактического радиуса инструмента сводится к формированию такой траектории,
которая является эквидистантной запрограммированной. В ряде УЧПУ
высокого уровня возможна коррекция и учет в УП до 15 различных параметров
инструмента.
Реализация циклов. Выделение повторяющихся (стандартных) участков
программы, называемых циклами, является эффективным методом сокращения
УП. Так называемые фиксированные циклы характерны для определенных
технологических операций (сверления, зенкерования, растачивания, нарезания
резьбы и т. п.) и встречаются при изготовлении многих изделий. При разработке
УП фиксированные циклы указываются в программе, а их отработка ведется в
соответствии с определенной подпрограммой, заложенной в память СЧПУ
системой программного обеспечения или конструктивной схемой. В УЧПУ
высокого уровня в памяти управляющей ЭВМ может храниться, а,
следовательно, может быть оперативно использовано до 500 стандартных
циклов и подпрограмм.
Программные технологические циклы соответствуют повторяющимся
участкам данной обрабатываемой детали. Эти циклы в определенных СЧПУ
также могут быть выделены и занесены в оперативную память СЧПУ, а при
повторениях в соответствии с командами УП реализовываться с вызовом их из
оперативной памяти.
Смена инструмента. Эта функция характерна для
многоинструментальных и многоцелевых станков. Задача смены инструмента в
общем случае имеет две фазы: поиск гнезда магазина с требуемым инструментом
и замену отработавшего инструмента на новый. В ГАП со складом инструментов
имеются сложные системы автоматического снабжения (замены) инструментов
магазинов станков.
Коррекция погрешностей механических и измерительных устройств.
Любой конкретный агрегат механообработки (т.е. объект управления) можно
аттестовать с помощью измерительных средств достаточно высокого класса
точности. Результаты такой аттестации в виде таблиц погрешностей
7

(внутришаговая ошибка, накопленная ошибка, люфты, температурные
погрешности) заносятся в память СЧПУ. При работе системы текущие
показания датчиков агрегатов корректируются данными из таблиц погрешностей.
Системы высокого уровня имеют встроенные контрольно-измерительные
комплексы, контролирующие основные параметры станка в так называемом
фоновом режиме. Результаты контроля тотчас же используются для проведения
необходимых коррекций.
Адаптивное управление обработкой. Для осуществления такого
управления необходимая информация получается от специально установленных
датчиков, с помощью которых измеряют момент сопротивления резанию или
составляющие сил резания, мощность привода главного движения, вибрацию,
температуру, износ инструмента и др. Чаще всего адаптация осуществляется
изменением контурной скорости или скорости привода главного движения.
Накопление статистической информации. К статистической информации
относятся фиксация текущего времени и времени работы системы и ее отдельных
узлов, определение коэффициента загрузки оборудования, учет изготовленной
продукции, фиксация ее отдельных параметров и т.д.
Автоматический встроенный контроль. Организация такого контроля в
зоне обработки особенно актуальна для ГАП. Непрерывный контроль по
формируемым размерам обрабатываемого изделия — одна из основных задач
повышения качеств обработки.
Дополнительные функции. К дополнительным функциям можно
отнести следующие: обмен информацией с ЭВМ верхнего уровня, согласованное
управление оборудованием технологического модуля, управление элементами
автоматической транспортно-складской системы, управление внешними
устройствами, связь с оператором, техническую диагностику технологического
оборудования и самой системы ЧПУ, оптимизацию отдельных режимов и циклов
технологического процесса и др.
8

ИНФОРМАЦИОННАЯ СТРУКТУРА СЧПУ СТАНКАМИ
К СЧПУ относят средства, участвующие в выработке по заданной
программе управляющих воздействий на исполнительные органы станка и другие
механизмы, средства внесения и управляющее воздействие внешних и
адаптивных поправок, а также средства диагностики и контроля
работоспособности СЧПУ и станка при изготовлении детали. СЧПУ станком
должна включать: технические средства; программное обеспечение (для
программируемых СЧПУ); эксплуатационную документацию.
К техническим средствам СЧПУ относятся: вычислительно-логическая
часть (включая запоминающие устройства различного типа для программируемых
систем); средства формирования воздействий на исполнительные органы станка
(приводы подач и главного движения, исполнительные аппараты
электроавтоматики и др.); средства связи с источниками информации о состоянии
управляемого объекта (измерительными преобразователями различных видов,
устройствами контроля, адаптации, диагностики и др.); средства,
обеспечивающие взаимодействие с внешними системами и периферийными
устройствами (каналы связи с ЭВМ высшего ранга и др.). Технические средства,
входящие в состав СЧПУ, обычно конструктивно оформляются в виде
автономного устройства — УЧПУ.
Основными классификационными признаками СЧПУ являются уровень
сложности управляемого оборудования и число осей, связанных решением
единой интерполяционной задачи во времени. По этому признаку СЧПУ
станками подразделяют на следующие группы:
СЧПУ с прямоугольным формообразованием по одной оси координат;
СЧПУ с контурным формообразованием при ограниченном составе
функций по двум или трем осям координат (информационным каналам);
СЧПУ с расширенными функциональными возможностями для оснащения
многоцелевых станков и станков со сложным объемным
9

формообразованием по четырем—пяти осям координат (информационным
каналам);
СЧПУ с расширенными функциональными возможностями, включая
специальные задачи управления, для оснащения тяжелых и уникальных
станков и станочных модулей по 10—12 осям координат
(информационным каналам).
Сложность структуры СЧПУ определяется по информационным
признакам и оценивается числом и характером информационных каналов,
используемых при работе системы. В связи с тем, что информационное
назначение устройств и их элементов, входящих в СЧПУ, различно, их относят к
различным иерархическим рангам. Обычно СЧПУ станками имеет двух- или
трехранговую структуру, обеспечивая при этом выходы на более высокие ранги
для работы в качестве компонентов ГПС, автоматизированных линий, участков
и других производственных комплексов.
При структурно-информационном анализе СЧПУ принято определенное
распределение уровней и информационных каналов.
Уровень 0-го ранга — это совокупность таких факторов, как температура,
качество материалов, данные контрольно-измерительной аппаратуры и др.
Уровень 1-го ранга — это преобразователи, формирующие информацию
каналов:
— по положению исполнительных органов станка,
— по технологическим и размерным параметрам, характеризующим
состояние технологической системы;
— по параметрам возмущений, вносимых в технологическую систему;
— по точности детали, обрабатываемой на станке;
— по замене приспособлений, инструмента и готовности станка;
— по наблюдению за правильным ходом процесса резания и регистрации
возникающих неполадок, а также выработке способов их устранения.
Уровень 2-го ранга — это совокупность исполнительных регулируемых
приводов и исполнительных механизмов станка:
10