Koren B., Vuik K. (Editors) Advanced Computational Methods in Science and Engineering
Подождите немного. Документ загружается.

On Numerical Issues in Time Accurate Laminar Reacting Gas Flow Solvers
holds, where w
n
is the numerical solution of the semi-discretization w
′
(t) = F(t,w)
on time t = t
n
. The validation and interpretation of the results is done in Section 6.
Right now, we are only interested in the performance of the various ODE integrators.
In Table 3, 4 and 5 numerical results for the various time integration methods,
with either the full or modified Newton iteration to solve the nonlinear systems, and
the relative errors with respect to a time accurate ODE solution, on some fixed times
in the L
2
norm, are given. We used relative errors, because the solution contains
relatively small components. The user-specified quantity TOL to monitor the local
truncation error is taken equal to 10
−3
. For the time accurate ODE solution this
value was set to 10
−6
. We observe that for the global errors as presented in Tables
3, 4 and 5, the behavior is as expected.
For the unconditional positive EB time integration scheme it can be remarked
that modified Newton (see above) influences the positivity of the solution, i.e., the
number of rejected time steps due to negative species increases (compare Tables
3 and 4), and is in this case equal to 31. Rejected time steps due to negative en-
tries in the solution vector should be redone with smaller time steps, resulting in
a larger number of F evaluations (the number of Jacobian evaluations is approxi-
mately equal). Thus, as a result of an increasing number of Newton iterations, the
total computational costs increase.
For the BDF2 scheme (compare Tables 3 and 4), application of modified New-
ton strategy, as explained above, gives more satisfying results. From Table 4 it can
be concluded that for BDF2 an increasing number of cheaper Newton iterations is
computationally cheaper than factorizing the Jacobian in every Newton iteration.
With respect to the other higher order time integration schemes (see Table 5), we
note the following. ROS2 is the cheapest higher order time integrator for this CVD
process. For the IRKC scheme we see that both versions perform equally well. Since
there is no gain in efficiency by using ‘on the fly’ stability conditions for the explicit
part, the more robust fully CFL-protected IRKC(full) is preferred.
Number of EB BDF-2
F 190 757
F
′
94 417
Linesearch
11 0
Newton iters
94 417
Rej. time steps
1 10
Acc. time steps
38 138
CPU Time
6500 30500
Relative error (t = 1.6 s /t = 3.2 s)
6.8·10
−3
/7.9 ·10
−4
2.2·10
−3
/ 1.4·10
−4
Table 3 Integration statistics for EB and BDF-2, with full Newton solver
With respect to positivity of the solution during transient simulations we note the
following. Omission of the reacting surface and thermal diffusion in the reaction
Jacobian gives very poor Newton convergence. We also observed that in this case
the solution conserves positivity for very small time steps only, even for EB. We
63
S. van Veldhuizen, C. Vuik, and C.R. Kleijn
Number of EB BDF-2
F 720 1786
F
′
84 163
Linesearch
39 33
Newton iters
463 1441
Rej. time steps
31 33
Acc. time steps
88 121
CPU Time
10800 17000
Relative error (t = 1.6 s/t = 3.2 s)
6.8·10
−3
/7.9 ·10
−4
2.2·10
−3
/ 1.4 ·10
−4
Table 4 Integration statistics for EB and BDF2, with modified Newton, as explained in Section
4.2
Number of ROS2 IRKC(fly) IRKC(full)
F 424 429662 427911
F
′
142 2005 2008
Linesearch
0 50 30
Newton iters
0 17425 17331
Rej. time steps
2 729 728
Acc. time steps
140 1276 1284
CPU Time
8000 20000 19500
Relative error(t = 1.6 s/t = 3.2 s)
1.1·10
−3
/2.5 ·10
−4
1.8·10
−3
/8.3 ·10
−5
Table 5 Integration statistics for ROS2, IRKC(fly), where stability for the explicitly integrated part
is tested for diffusion only, and IRKC(full), where stability conditions are forced for both advection
and diffusion, schemes.
conclude that for this CVD problem it is required to use the exact Jacobian, in which
also the derivatives of the reacting surface and thermal diffusion are included.
From the integration statistics presented in Tables 3-5 it is concluded that for
long time steady state simulations Euler Backward is, in spite of its first order accu-
racy, the most efficient time integrator. In [24] we concluded that the unconditional
positivity of Euler Backward is preferred over the conditional higher order methods
present in this section.
Off the shelf stiff ODE solvers like ODEPACK and DASSL do not test for posi-
tivity. The ODE suite ODEPACK is a collection of Fortran solvers for ODE systems.
This code and related codes, like LSODE and VODE, were the result of a long devel-
opment which started with Gear, see [7, 3]. The DASSL code, which is also suitable
for differential algebraic equations, employs the BDF formulas and is described in
detail in [2]. The purpose of their design is to integrate (stiff) ODEs by means of
BDF methods of the highest order possible in order to reduce computational costs.
These codes automatically select their order of accuracy based upon the time step
size and a user-defined tolerance of required accuracy.
If these codes would test for positivity, then they should all switch back to first
order accuracy to maintain the positive solutions. For this reason, we designed a
computationally efficient Euler Backward solver. The remaining sections in this
chapter are devoted on the design of this solver. In particular we pay attention to
64

On Numerical Issues in Time Accurate Laminar Reacting Gas Flow Solvers
the robustness, and thus positivity, of the solver, and, of course, the reduction of
computational costs.
5 Design of the Euler Backward solver
The combination of the severe stiffness and the required positivity basically reduces
the time integration method to Euler Backward, as we have discussed in the previous
section. In practice, however, the use of Newton methods to iteratively solve the
nonlinear systems, does not guarantee positivity of the solution. In Section 5.1 we
propose a projected version of Newton’s method to overcome this problem, and
consequently, make the Euler Backward solver more robust.
Generally speaking, the large number of species results in huge nonlinear sys-
tems. The linear systems in Newton’s method are, consequently, also large. Second,
they are also sparse, which makes Krylov solvers suitable candidates to solve them.
Newton’s method combined with Krylov solvers are called Inexact Newton meth-
ods.
5.1 Globalized Inexact Projected Newton methods
In Inexact Newton solvers the Newton step, i.e. s
k
= −[F(x
k
)]
−1
F(x
k
), is approx-
imated by an iterative linear solver, which is in our case a preconditioned Krylov
method. The approximated Newton step s
k
has to satisfy the so-called Inexact New-
ton condition
kF(x
k
) + F
′
(x
k
)s
k
k ≤
η
k
kF(x
k
)k, (25)
for a certain ‘forcing term’
η
k
∈[0, 1). Note that the forcing term expresses a relative
stopping criterion for the Krylov method.
In [23] it has been concluded that for laminar reacting gas flow simulations the
best choice for the forcing term is to base it on residual norms as
η
k
=
γ
kF(x
k
)k
2
kF(x
k−1
)k
2
, (26)
with
γ
∈ [0,1) a parameter. The order of convergence of Inexact Newton with this
forcing term is two. In our experiments we put
γ
= 0.5, which worked fine.
It is generally known that Newton’s method converges towards a solution if and
only if the initial guess is in a neighborhood of this solution, see for instance [17].
Global convergence is enforced by implementing a line-search algorithm in the In-
exact Newton algorithm. This has been done as was proposed in [6].
In [23] we proposed an extension of the Globalized Inexact Newton method such
that it preserves positivity of species concentrations. We call this Globalized Inexact
Projected Newton (GIPN). As has been remarked in [23], repetitions of negative
65
S. van Veldhuizen, C. Vuik, and C.R. Kleijn
species concentrations can be observed in practice. The i-th entry of the projection
P is defined as:
P
i
(x) =
x
i
if x
i
≥ 0.
0 if x
i
< 0.
(27)
In every Globalized Inexact Projected Newton step we test whether the projected
solution satisfies the sufficient decrease condition, i.e.,
kF(P(x
k
+ s
k
))k > (1 −
α
(1 −
η
k
))kF(x
k
)k. (28)
For a comprehensive description and background of the GIPN methods we refer to
[23]. The present GIPN method, which is implemented in our code, is summarized
in Algorithm 1.
Algorithm 1 Globalized Inexact Projected Newton
1: Let x
0
,
η
max
∈ [0,1),
α
∈(0, 1) and 0 <
λ
min
<
λ
max
< 1 be given.
2: for k = 1, 2, . . . until ‘convergence’ do
3: Find some
η
k
∈ [0,
η
max
] and s
k
that satisfy
4: kF(x
k
) + F
′
(x
k
)s
k
k ≤
η
k
kF(x
k
)k.
5: while kF(P(x
k
+ s
k
))k > (1 −
α
(1−
η
k
))kF(x
k
)k do
6: Choose
λ
∈ [
λ
min
,
λ
max
]
7: Set s
k
←
λ
s
k
and
η
k
← 1 −
λ
(1−
η
k
)
8: If such
λ
cannot be found, terminate with failure.
9: end while
10: Set x
k+1
= P(x
k
+ s
k
).
11: end for
5.2 Preconditioned Krylov solver
Roughly speaking, there are two classes of Krylov solvers to solve large, sparse lin-
ear systems. On the one hand we have the class of GMRES solvers, and on the other
hand we have the Bi-CGSTAB solvers. In the numerical linear algebra community
it is well known that both methods have advantages and disadvantages. The linear
systems in our code result from spatial discretization on a structured grid. Conse-
quently, the matrix-vector multiplication is cheap to implement. Bi-CGSTAB needs
two matrix-vector multiplications per linear iteration and needs seven vectors in
memory. GMRES, however, needs only one matrix-vector multiplication, but needs
more vectors in memory. Because the matrix-vector multiplication is cheap, we use
from a memory usage point of view, the Bi-CGSTAB method.
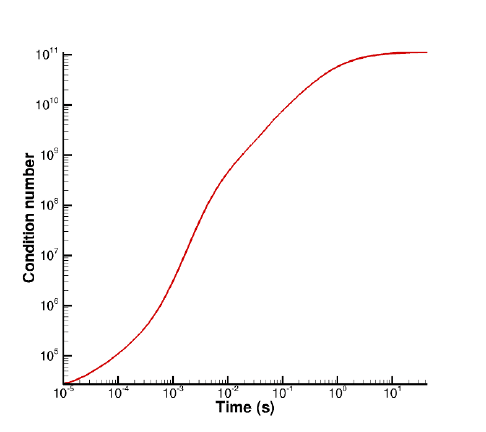
The partial derivatives of the stiff and highly nonlinear reaction terms in eq. (1)
cause ill-conditioned Jacobian matrices. In Figure 4 the typical order of magnitude
of the condition-number of the Jacobian is shown as a function of (real) time (in
seconds).
66
On Numerical Issues in Time Accurate Laminar Reacting Gas Flow Solvers
If the eigenvalues of a matrix A are not clustered, it probably has a large condi-
tion number. It is well known that solving ill-conditioned linear systems with Krylov
solvers, leads to bad convergence or divergence of the Krylov method. Fast conver-
gence can be achieved by multiplying the A with a preconditioner M
−1
, such that
the eigenvalues of AM
−1
are efficiently clustered in comparison with those of A.
For the simulations in the present paper, Krylov solvers without preconditioning are
ruled out, because the condition numbers of the Jacobian matrices are far too large
to expect Bi-CGSTAB convergence at all.
As a final remark before we discuss a set of suitable preconditioners, we want
to emphasize on the following rule of thumb. The partial derivatives of the reac-
tion terms, which contribute considerably to the large condition numbers, should be
inverted in order to reduce the condition number of the preconditioned systems. Fur-
ther, we mention that the ordering of unknowns and equations influences both the
performance and construction of a preconditioner. In the present paper, we consider
only the alternate blocking per grid point ordering, in which the unknown species
concentrations are ordered per grid point. The corresponding non-zero pattern of the
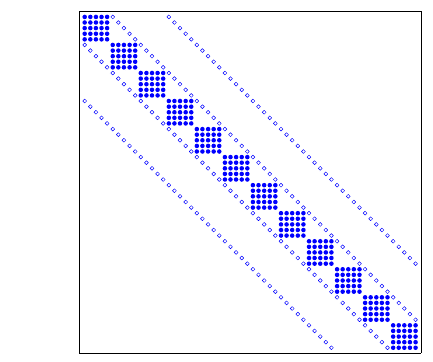
Jacobian is shown in Figure 5.
Fig. 4 Condition-number of the Jacobian as function of time (in seconds)
For the acceleration of the internal linear algebra problem in Algorithm 1, the
following preconditioners are compared:
• Incomplete factorization without fill-in, denoted as ILU(0),
67
S. van Veldhuizen, C. Vuik, and C.R. Kleijn
Fig. 5 Non-zero structure of the Jacobian for the alternate blocking per grid point ordering. The
partial derivatives of the chemistry terms in Eq. (1) are represented by dots, and the super- and sub-
diagonals marked by circles are the off-diagonal discretized advection-diffusion terms in Eq.(1).
• Lumped Jacobian: a relatively good approximation of the Jacobian, which also
is easy to invert, can be obtained by adding all off-diagonal elements related to
the same species of a row to the main diagonal element, see [23],
• Block D-ILU: a block version of the D-ILU preconditioner, see for instance, [19],
• Block diagonal: omitting off-diagonal blocks gives an easy invertible block-
diagonal structure that resembles the Jacobian quite well.
A comprehensive discussion on these preconditioners combined with the GIPN
method can be found in [23]. In this paper we restrict ourselves to the conclusions
drawn in [23]. In terms of efficiency the incomplete factorization based precondi-
tioners perform excellent. Taking into account other arguments like the number of
Jacobian evaluations, the total number of linear iterations, positivity and robustness,
makes the block D-ILU preconditioner, combined with GIPN, the best precondi-
tioner for this class of problems.
6 Numerical results
Numerical experiments are done with the Euler Backward solver as presented in the
previous section. In all experiments we used block D-ILU as preconditioner. The
numerical tests are done for the two models of the CVD process of silicon from
silane, as presented in Section 3, on three different grid sizes. The simulations are
done on a grid with n
r
= 35 grid points in radial direction and n
z
= 32 grid points in
axial direction, an n
r
= 35 by n
z
= 47 grid and an n
r
= 70 by n
z
= 82 grid. For all
68
On Numerical Issues in Time Accurate Laminar Reacting Gas Flow Solvers
grid holds that the grid points in radial direction are equidistant. The grid points in
axial direction have a gradually decreasing grid spacing towards the wafer surface.
For the finest grid, i.e., the 70×82 grid, the axial distance from the wafer to the first
grid point equals 1 ·10
−6
m, and thereafter the grid spacing will gradually increase
to
∆
z = 5 ·10
−3
m for z ≥ 0.04 m. For the coarsest grid the distance between the
wafer and the first grid point is 2.5·10
−4
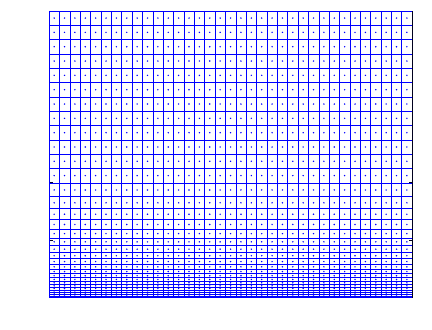
m. The 35 ×32 grid is illustrated in Figure
6.
0 0.025 0.05 0.075 0.1 0.125 0.15 0.175
0
0.02
0.04
0.06
0.08
0.1
r(m)
z(m)
Fig. 6 Computational 35 ×32 grid. Species mass fractions are computed in the cell centers (rep-
resented as dots).
First, we present and discuss the integration statistics for the time accurate tran-
sient simulations of both chemistry models introduced in Section 3. Thereafter,
some time accurate results and their validation are presented.
6.1 Discussion on the integration statistics
For all simulations in this section, of which we present integration statistics, holds
that the simulations run from inflow conditions until the steady state solution is
reached. In all these simulations we allow the maximum number of time steps to
be 1000. With respect to the number of allowed Newton iterations per time step
we remark the following. The strongly nonlinear reaction terms sometimes cause
difficulties in finding the correct search direction. More specific, in the time frame
right before steady state is reached, we experienced that to find the correct search
direction might take a few extra Newton iterations. Therefore, the maximum number
of Newton iterations is set to 80.
69
S. van Veldhuizen, C. Vuik, and C.R. Kleijn
Further, it has to be mentioned that in this paper time accurate transient results
are shown for different wafer temperatures varying from 900 up to 1100 K. Because
of the large activation energies of some of the reactants (see Table 1 and 2), such
temperature differences lead to large qualitative and quantitative differences in the
solutions. The behavior and the integration statistics of the computational method
is, however, not influenced by the wafer temperature. Therefore, we will restrict
ourselves to present the integration statistics for one wafer temperature per compu-
tational grid.
In Table 6 relevant integration statistics are listed for the 7 species and 5 reactions
model of Section 3.1. For this problem the grid size has no large influence on the
total number of Newton iterations. The effect of different grid sizes is reflected in
the number of linear iterations and CPU time. Due to the quality of the block D-ILU
preconditioner, no rejected time steps are observed in these simulations. Weaker
preconditioners can result in rejected time steps due to Newton divergence and/or
negative species concentrations, see [23].
Due to its stronger nonlinearity, the number of Newton iterations increases for the
17 species and 26 gas phase reactions CVD model, see Table 7. Again, the block D-
ILU preconditioner shows excellent performance with respect to positivity and fast
Bi-CGSTAB convergence. However, for the finest grid, with more grid cells in the
reaction zone, the semi-discrete problem is considerably stiffer than for the other
two grids. This greater stiffness is especially reflected in the increasing condition
numbers of the Jacobian, which are no longer easily cancelled by the preconditioner.
This explains the relatively large number of linear iterations on the finest grid, see
Table 7. When a ‘weaker’ preconditioner is used in this case, it is not possible to do
a complete simulation from inflow conditions until steady state, due to many time
step rejections caused by Newton divergence [23].
With respect to the total computational costs of these simulations the follow-
ing has to be remarked. Since in almost any case the required accuracy of the ap-
proximated linear solutions is low, the Bi-CGSTAB algorithm converges in a small
amount of iterations. However, when the stiff chemistry comes into play and an ac-
curately approximated linear solution is needed, the Bi-CGSTAB algorithm needs
to overcome a stagnation phase in order to obtain superlinear convergence. In the
stagnation phase the Ritz values belonging to the ‘bad’ eigenvalues have not fully
converged to the eigenvalues of the preconditioned system. If they have, then these
‘bad’ eigenvalues do not contribute to the effective condition number, and, hence,
Bi-CGSTAB converges superlinearly to the solution.
Note that accurate linear approximations are only needed when the steepest de-
scent direction is found in Newton’s method. In the first few Newton iterations the
required accuracy of the linear solutions is relatively low [23] and thus are the costs
of constructing the Jacobian more important than the costs of the preconditioned
Bi-CGSTAB solver to find an approximation of the linear solution.
70
On Numerical Issues in Time Accurate Laminar Reacting Gas Flow Solvers
Table 6 Number of operations for the 7 species and 5 reactions problem on three computational
grids. The wafer temperature is different for each computational grid.
Grid size 35 ×32 35 ×47 70×82
Wafer temperature 1000 K 950 K 900 K
Newton iters 80 89 91
Line search 9 6 7
Total linear iters 430 1,137 1,003
CPU time (sec) 140 230 690
Table 7 Number of operations for the 17 species and 16 reactions problem on three computational
grids. The wafer temperature is different for each computational grid.
Grid size 35 ×32 35 ×47 70×82
Wafer temperature 1000 K 950 K 900 K
Newton iters 93 148 306
Line search 4 28 96
Total linear iters 718 859 2,144
CPU time (sec) 320 470 4,175
6.2 Model validation and time accurate solutions
Correctness of our steady state solution, obtained after long time integration, is val-
idated against the steady state solution obtained with the software of Kleijn [15].
The solver of Kleijn [15] computes the steady state solution of the system of species
equations (1). The approach followed in [15] is to march through the computational
domain from grid point to grid point and solving (1) by a time-relaxation algo-
rithm. Kleijn’s approach is robust, but computationally inefficient. All simulations
presented in this paper are test cases where the wafer is not rotating.
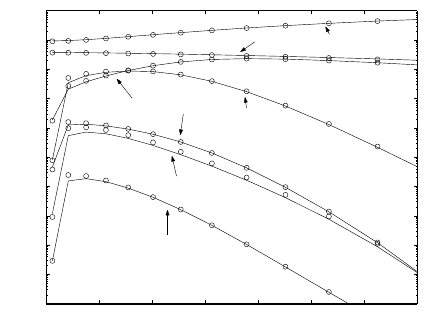
In Figure 7 steady state mass fraction profiles are presented for some selected
species, as well as the ones obtained by Kleijn [15], for a wafer temperature equal to
1000 K. In this case, the total steady state deposition rate of silicon at the symmetry
axis as found by Kleijn [15] is 1.92
nm
s
, whereas we found a deposition rate of
1.93
nm
s
. Both values compare excellently to those obtained with the well-known 1-
dimensional CVD simulation code SPIN within the Chemkin family [5]. In Figure
8 transient deposition rates are presented for some selected species, as well as the
transient total deposition rate. It can be seen that the time dependent behavior of
these deposition rates is monotonically increasing and stabilizes when the solution
is in steady state. Also shown are the steady state deposition rates obtained with the
software of Kleijn [15], which are in very good agreement with our current results.
In Figure 9 we present transient total deposition rates for simulations with wafer
temperatures varying from 900 K up to 1100 K. The time dependent behavior of
all deposition rates is monotonically increasing until the species concentrations are
in steady state. Note that the relative contributions of the various silicon containing
species to the total deposition rate is a function of the wafer temperatures, with
the relative contribution of Si
2
H
2
increasing with increasing temperature, and the
71
S. van Veldhuizen, C. Vuik, and C.R. Kleijn
relative contribution of H
2
SiSiH
2
decreasing with increasing temperature. In Figure
10 the species concentrations of SiH
2
for wafer temperatures T
s
= 900 K and T
s
=
1100 K are shown. We see that for T
s
= 1100 K the concentrations of SiH
2
are
much higher along the reacting surface than for T
s
= 900 K. Note that in Figure
10 the legends of both concentration fields differ two orders of magnitude. For the
species concentrations of H
2
SiSiH
2
, which are shown in Figure 11, we see that the
concentration of H
2
SiSiH
2
for T
s
= 1100 K is nearly zero along the wafer. This
results in a relatively small contribution of H
2
SiSiH
2
to the deposition rate.
In Figure 12 the transient behavior of the gas phase chemistry can be seen quite
clearly. At time t = 0.5 s we see that reactive silane is entering the reactor from the
top, but has not reached the reactive susceptor surface. At an inlet velocity of 0.1
m/s and a distance between the inlet and the susceptor of 0.1 m this actually takes
1 s. This is confirmed by Figure 8 and 9, in which it can be seen that deposition
does not start until t ∼ 1 s. A couple of seconds later at time t = 5 s, when the CVD
process is almost in steady state, we see that along the reacting surface almost all
silane molecules either have been decomposed into volatile reaction products, or
have been adsorbed to the susceptor surface to form a solid silicon film (see Figure
12).
Figure 13 shows radial profiles of the total steady state deposition rates for both
of Kleijn’s steady state computations [15], and our steady state results obtained
with the Euler Backward solver as discussed in Section 5, for wafer temperatures
varied from 900 K up to 1100 K. Again, the agreement is excellent for all wafer
temperatures. For all studied temperatures, the steady state growth rates obtained
with the present transient solution method were found to differ less than 5% from
those obtained with Kleijn’s steady state code.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014
10
−12
10
−11
10
−10
10
−9
10
−8
10
−7
10
−6
10
−5
10
−4
10
−3
10
−2
Height above Susceptor (m)
Species Mass Fractions (−)
SiH
4
H
2
H
2
SiSiH
2
SiH
2
Si
2
H
6
Si
2
Si
Fig. 7 Axial steady state concentration profiles along the symmetry axis for some selected species.
Solid lines are Kleijn’s solutions [15], circles are long time steady state results obtained with the
present transient time integration methods.
72