Конюх В.Л. Компьютерная автоматизация производства
Подождите немного. Документ загружается.

61
подводят сжатый воздух. При подаче напряжения в обмотку золотник
перемещается вниз и воздух через нижнее отверстие поступает
в рабочую полость пневмопривода.
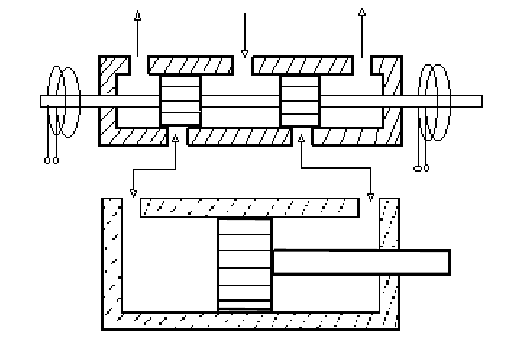
Электрогидрораспределитель представляет собой цилиндрический
корпус 1 с пятью отверстиями, внутри которого под действием элек-
тромагнитов 2 перемещается золотник, представляющий собой вал с
двумя цилиндрическими насадками (рис. 2.49).
Н
2 2
3
1
С
С
Рис. 2.49. Устройство электрогидрораспределителя:
1 – корпус; 2 – обмотки электромагнитов; 3 – золотник
Напорная магистраль Н присоединена к среднему верхнему отвер-
стию, а сливная С – к двум крайним. Если ни в одну из обмоток не
подается напряжение, золотник находится в нейтральном положении
и рабочая жидкость не поступает ни в одну из полостей гидроци-
линдра. При подаче напряжения в левую обмотку золотник перемеща-
ется влево и жидкость из напорной магистрали подается в поршневую
полость. Штоковая полость при этом соединяется со сливной магист-
ралью. При подаче напряжения в правую обмотку золотник перемеща-
ется вправо, жидкость под давлением подается в штоковую полость, а
из поршневой через гидрораспределитель поступает в сливную маги-
страль.
Для управления непрерывными перемещениями элементов при-
меняют электрический сервопривод, электрогидравлический усили-
62
тель или следящий пневмопривод. В следящем пневмоприводе факти-
ческое положение штока пневмоцилиндра измеряют потенциометри-
ческим измерителем перемещений. Его выходное напряжение подают
в одну обмотку сопла струйного электропневмопреобразователя, а за-
данное напряжение – в другую. В зависимости от рассогласования за-
данного и фактического положений штока сопло поворачивается и на-
правляет струю воздуха в соответствующую полость пневмоцилиндра
до тех пор, пока рассогласование напряжений не снизится до нуля.
2.3. ПРЕОБРАЗОВАНИЕ СИГНАЛОВ
Систему управления можно представить в виде устройства, на вхо-
ды I (Input) которого подаются аналоговые AI и дискретные DI сигна-
лы от датчиков, а с выхода О (Output) снимаются аналоговые АО и
дискретные DO команды управления объектом (рис. 2.50).
АO DO
AI DI
АЛГОРИТМ УПРАВЛЕНИЯ
Приводы
Переключатели
Измерители
перемещений и усилий
Датчики положения,
тактильные датчики
Input
Output
Рис. 2.50. Схема управлением объектом
Для подключения распределенных по оборудованию датчиков и
исполнительных устройств к быстродействующему микропроцессор-
ному устройству управления необходимы защита от дребезга контак-
тов на входе устройства, гальваническая развязка входных и выходных
сигналов, преобразование импульсов напряжения входных устройств в
форму внутренних сигналов микропроцессорного устройства, преобра-
зование выходных сигналов в напряжения управления исполнитель-
ными устройствами, аналого-циф-ровое (АЦП) и цифроаналоговое
(ЦАП) преобразования (рис. 2.51).
63
Датчик
Гальваническая
развязка
АЦП
Микро-
ЭВМ
Гальваническая
развязка
ЦАП
Исполнительное
устройство
Объект управления
Рис. 2.51. Сопряжение аналоговых датчиков и исполнительных
устройств с микроЭВМ
Дребезг контактов – это кратковременное отскакивание контактов
датчика друг от друга после их первого замыкания. Продолжитель-
ность отскакивания достаточна для перехода быстродейству-ющего
устройства управления, к которому подключен датчик, в не-
предусмотренное алгоритмом состояние. Для защиты от дребезга кон-
тактов вводят инерционные элементы на входе (а) или специальные под-
программы (б) в программе работы порта ввода (рис. 2.52).
Антидр
ебезг
Порт
ввода
МикроЭВМ
Датчик
U
0
R
а
б
С
Рис. 2.52. Защита от дребезга контактов датчика:
а – аппаратная; б – программная
Гальваническая развязка между датчиками и устройством управления
необходима для защиты микроЭВМ от бросков напряжения на входе,
например при попадании высокого напряжения в линию связи, а также
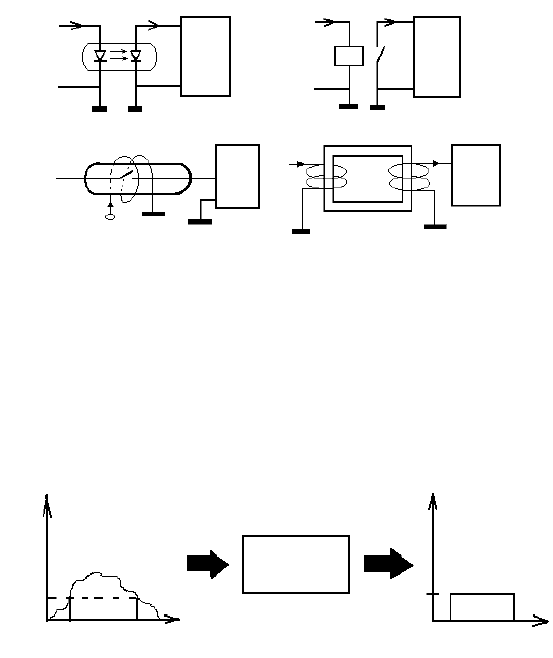
для исключения связи датчиков через устройство управления. В каче-
стве устройств гальванической развязки применяют оптическую пару,
реле, трансформатор или геркон, не имеющие электрического контак-
та между входом и выходом (рис. 2.53). Эти устройства часто допол-
няют индикаторами сигнала. Гальваническая развязка требуется также
для выходов микроЭВМ.
64
а
б
в
г
ПК
ПК
ПК
ПК
Р
Р
Рис. 2.53. Способы гальванической развязки на входе
программируемого контроллера:
а – оптическая пара; б – реле; в – магнитоуправляемый
контакт; г – трансформатор
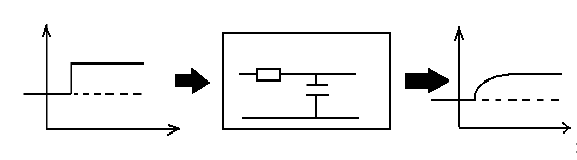
Формирование искаженных линией связи сигналов от разнообраз-
ных датчиков в уровень внутреннего напряжения устройства управле-
ния осуществляют с помощью триггера (рис. 2.54). При напряжении на
входе выше заданного уровня триггер переходит в состояние «1», при
снижении – в состояние «0».
U
Триггер
U
5 В
Т1 Т2
t
t
Т1 Т2
0.6 В
Рис. 2.54. Преобразование произвольного сигнала датчика
в стандартный вид
Для защиты от импульсных помех в линии связи применяют инте-
гратор (рис. 2.55). При появлении импульсной помехи в интеграторе
происходят заряд и разряд конденсатора.
65
U
U
Интегратор
t
t
Рис. 2.55. Фильтрация импульсных помех в линии связи
микроЭВМ с датчиком
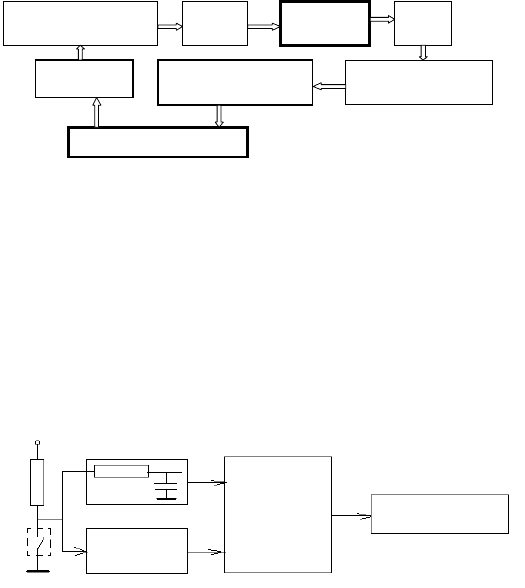
Особенно трудно ввести в цифровое устройство управления анало-
говые сигналы датчиков. Чтобы уменьшить стоимость входных уст-
ройств, применяют поочередную обработку сигналов нескольких дат-
чиков на одном входе устройства управления с помощью мультиплек-
сора, схемы выборки-запоминания, аналого-цифро-вого преобразовате-
ля и порта ввода-вывода (рис. 2.56).
Порт ввода-вывода управляет мультиплексором, поочередно под-
ключающим датчики к входу управляющего устройства, и схемой вы-
борки-запоминания, сохраняющей сигнал на время его преобразова-
ния в цифровую форму с помощью АЦП. Для исключения потерь ин-
формации при преобразовании аналогового сигнала датчика в цифро-
вую форму преобразование сигнала надо проводить как можно чаще,
но это потребует увеличения быстродействия АЦП. Поэтому частоту
выборки сигнала задают по правилу Котельникова: аналоговый сигнал
восстанавливается полностью, если частота выборки его значений
вдвое больше максимальной частоты в спектре сигнала. Цифровой
сигнал поступает в порт ввода-выво-да, который выводит его на шины
микропроцессора, а затем включает мультиплексор, схему выборки-
запоминания и АЦП для приема сигнала следующего датчика.

66
Преобразование
физических
величин
Преобразование быстрых аналоговых сигналов
Мультиплексор
Схема выборки-
запомин
а
ния
АЦП
Порт ввода-вывода
Микропроцессор
Шина данных
Шина адресов
Шина управления
Переключение
датч
и
ков
•
•
•
•
Усилитель
P
t
Рис. 2.56. Ввод аналоговых сигналов в микропроцессорное
устройство управления
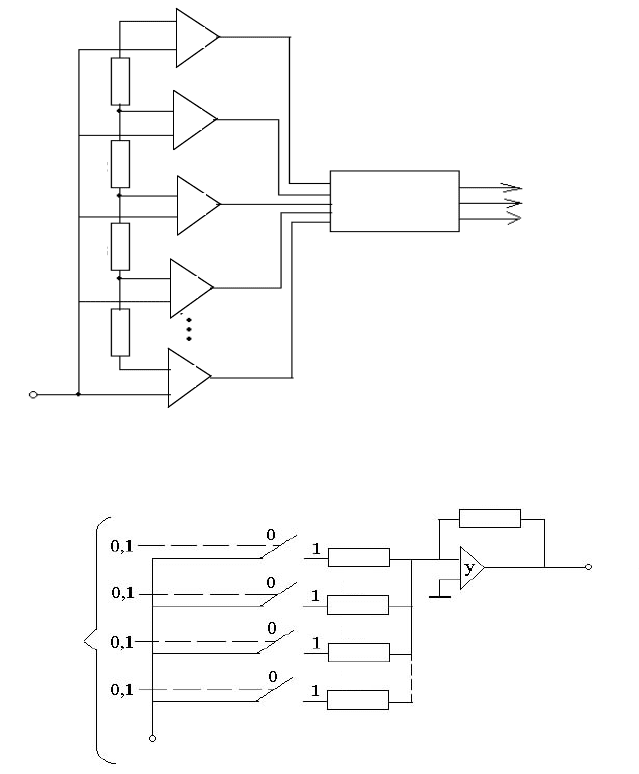
Простой аналого-цифровой преобразователь параллельного типа
состоит из нескольких параллельно включенных компарато-
ров K
1
,…, K
n
, каждый из которых с помощью резисторов R
1
,…, R
n
на-
строен на определенный уровень входного напряжения U
вх
(рис. 2.57). Выходы компараторов соединены с входом шифратора,
преобразующего набор двухпозиционных состояний компараторов в
цифровой код выходного напряжения.
Цифроаналоговый преобразователь формирует аналоговое напря-
жение в зависимости от цифрового кода на входе. Он может быть реа-
лизован в виде усилителя У, вход которого соединен с делителями на-
пряжения, их число равно числу разрядов входного кода (рис. 2.58).
67
R
1
Шифратор
Код
R
2
R
3
R
n
U
вх
K
1
K
2
K
3
K
4
K
n
Рис. 2.57. Параллельный аналого-цифровой преобразователь
Входной
код
R
U
min
R
R
R
R
U
0
Рис. 2.58. Цифроаналоговый преобразователь
2.4. КАНАЛЫ СВЯЗИ
68
Линия связи устройства управления с объектом представляет собой
физическую среду, через которую передается информация.
К линиям связи относят витую пару проводов с пропускной способно-
стью до 1 Мбит в секунду, коаксиальный кабель (до 10 Мбит в секун-
ду), оптические волокна (более 150 Мбит в секунду) или атмосферу,
через которую передают радио- или инфракрасные сигналы. Каналом
передачи информации называют линию связи, к началу которой под-
ключен передатчик, а к концу – приемник сигналов. Передача инфор-
мации от датчиков осуществляется парал-лельным или последователь-
ным способом (рис. 2.59).
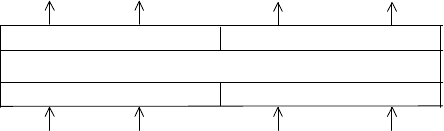
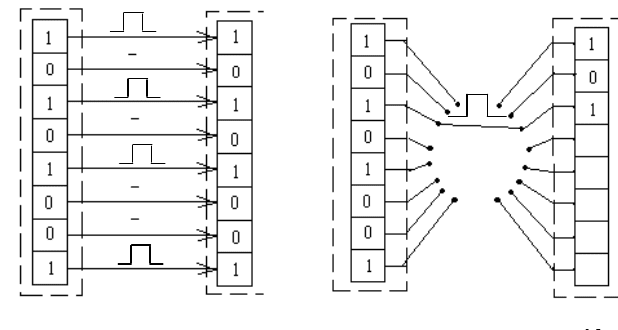
При параллельной передаче значение каждого разряда кода ин-
формации передается от передатчика А по отдельному проводу
к соответствующему разряду приемника В (рис. 2.59, а). Параллельный
интерфейс прост и надежен, но требует многопроводного соединения
передатчика с приемником. При последовательной передаче приемник
и передатчик соединяют одним проводом, который с помощью син-
хронных коммутаторов С
1
, С
2
подключают к одинаковым разрядам
передатчика А и приемника В (рис. 2.59, б).
А
В
а
А
В
С
1
С
2
б
Рис. 2.59. Схемы передачи информации от передатчика А
к приемнику В:
а – параллельная схема; б – последовательная схема
69
Последовательный интерфейс обеспечивает передачу информации
по одному проводу при обеспечении надежной синхронизации комму-
таторов.
Датчики рассредоточены на объекте автоматизации и связаны с
управляющим устройством через длинные линии связи, на которые
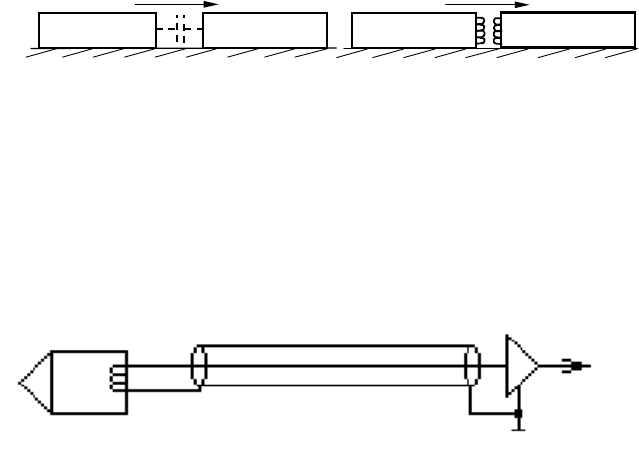
воздействуют помехи, искажая сигналы датчиков. Взаимные помехи
рядом расположенных объектов образуются за счет их емкостной или
индуктивной связи. В первом случае металлические корпуса двух сис-
тем, сообщающиеся через воздух, образуют конденсатор (рис. 2.60, а),
через который в линию связи проходят помехи переменного тока. Во
втором случае индуктивность источника образует электромагнитное
поле, изменяющее индуктивность приемника. Помехи проникают к
приемнику через такой трансформатор связи (рис. 2.60, б).
Помехи
Помехи
Источник
Приемник Приемник Источник
Источник
а б
Рис. 2.60. Связь двух близкорасположенных объектов:
а – емкостная; б – индуктивная
Для подавления взаимных помех преобразователь (датчик) (П) и
вход устройства управления (УУ) соединяют коаксиальным кабелем
(К), представляющим собой провод внутри экранирующей оплетки
(рис. 2.61). Экран заземляют в одной точке, обычно на входе устрой-
ства управления.
П
K
УУ
Рис. 2.61. Соединение преобразователя и устройства
управления коаксиальным кабелем

70
Самым дешевым способом подавления помех является скручива-
ние пары проводов, идущих от преобразователя к устройству управле-
ния (рис. 2.62). В каждой точке пересечения проводов помехи взаимно
уничтожаются, что приводит к подавлению помех на входе устройства
управления.
УУ
П
Рис. 2.62. Соединение преобразователя и устройства
управления скрученными проводами
Кроме взаимных помех на линию связи воздействуют случайные
помехи. Они характеризуются отношением
2
c
2
п
V
E
V
=
, (2.4)
где V
с
– среднее напряжение сигнала; V
п
– среднее напряжение по-
мехи.
Если уровень помехи близок к сигналу датчика, то к выходу датчи-
ка подключают усилитель, соединенный с началом линии связи. Са-
мыми высокими пропускной способностью и помехоустойчивостью
обладает волоконно-оптическая линия связи. В ней электрические сиг-
налы преобразуются в оптические импульсы, которые передаются по
оптическому волокну, а затем преобразуются в электрические сигналы
(рис. 2.63).
1
4
2
3
7
6
5
Рис. 2.63. Схема волоконно-оптической линии связи:
1 – оптическое волокно; 2 – модулятор; 3 – преобразователь
«электричество-свет»; 4 – передатчик; 5 – преобразователь
«свет-электричество»; 6 – демодулятор; 7 – приемник