Конюх В.Л. Компьютерная автоматизация производства
Подождите немного. Документ загружается.

11
ке S
11
. Конечно, новая ситуация из S
12
распознается с некоторой веро-
ятностью ошибки, зависящей от объема обучающей выборки и пра-
вильности построения решающих функций. Для работы в таких сре-
дах необходимо управление с элементами искусственного интеллекта.
В процессе обучения формируют набор признаков среды, необходи-
мый и достаточный для распознавания всех ситуаций из S
1
.
Оценка состояния каждого признака среды отдельным датчиком
требует крупных затрат на создание информационной системы. Возни-
кает задача распознавания состояний n признаков среды m < n датчи-
ками стоимостью Сi . Складываются два подхода к ее решению:
– установка минимального набора доступных датчиков для части
признаков среды m и получение остальных признаков (n – m) путем
логической обработки сигналов датчиков;
– применение многофункционального информационного датчика в
виде телекамеры или широкополосного микрофона, который соединен
с системой распознавания оптических или звуковых образов.
При первом подходе в обучающей выборке отыскивают устойчи-
вые логические связи признаков и выбирают наборы признаков среды
по фактору стоимости. Так, путем логической обработки аналогового
сигнала датчика скорости колесно-рельсового робокара-тягача можно
извлечь 11 признаков среды: скорость, направление движения, ускоре-
ние, замедление, превышение заданной скорости, сжатие и растяжение
состава, сход с рельсов, буксование, отказ электродинамического тор-
можения, счет попыток трогания с места [2]. Обычный контроль при-
знаков потребовал бы 11 разных датчиков с соответствующим увели-
чением стоимости системы.
Второй подход универсален, но требует сложных алгоритмов обра-
ботки наблюдаемого образа и сопоставления его с эталоном. Для ввода
зрительного, звукового или мультисенсорного образа в ЭВМ требуется
его кодирование.
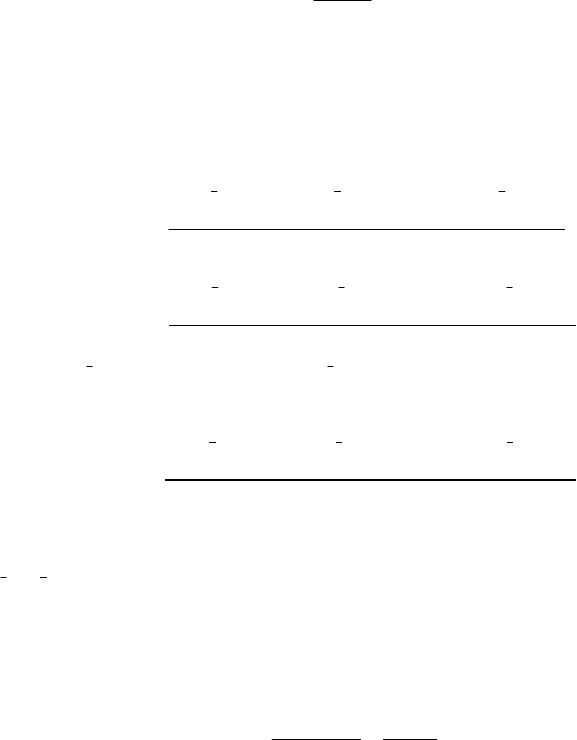
Для оценки степени изменчивости среды и ее влияния на управле-
ние представим процесс управления в виде ориентированного мульти-
графа, содержащего начальную A
0
, конечную A
q
, узловые B
1
,..., B
j
,..., B
m
и промежуточные A
1
,..., A
k
,...,
A
q–1
вершины, соединенные дугами с ве-
роятностями 0 ≤ P ≤ I (рис. 1.3).

12
А
6
А
5
А
0
А
1
А
2
А
3
В
1
А
q
R
j1
(S)
R
jr
(S)
R
11
(S)
R
j1
(S)
S (t)
S (t)
B
j
Рис. 1.3. Модель управления объектом в изменяющейся
технологической среде
В k-й промежуточной вершине за время τ
k
переключается одно из
исполнительных устройств объекта. В j-й узловой вершине выбирается
одно из r решений R
j
γ
с условной вероятностью:
(
)
( )
j i
j
i
P R S
P
P S
γ
γ
∩
=
,
2,...,
r
γ =
,
2
1
r
j
P
γ
γ =
=
∑
, (1.1)
зависящей от вероятности P(S
i
) изменения технологической среды в i-м
рабочем цикле и вероятности P(R
jγ
∩ S
i
) выбора в среде S
i
γ-го реше-
ния при условии функциональной стабильности оператора, управляю-
щего процессом. Узловые вершины, связанные с контролем правиль-
ности переключения исполнительного устройства, не зависят от среды,
поэтому приводятся к промежуточным. Реализация алгоритма в i-м
рабочем цикле представляет собой последовательность дуг от началь-
ной к конечной вершине через m
i
узловых вершин, имеет длину l
i
и
осуществляется с вероятностью:
1
i
m
i ij
j
P P
=
=
Π
. (1.2)
Введем понятие «сложность управления» как степень разнообразия
реализаций алгоритма управления при изменениях технологической
среды. Повышение размерности среды, ее изменчивости и влияния на

13
процесс управления приводит к росту числа узловых вершин, перерас-
пределению вероятностей P
ij
и увеличению разброса длин реализаций
относительно математического ожидания:
1
( )
n
i i
i
l l P l
=
=
∑
. (1.3)
Таким образом, сложность управления можно оценить дисперсией
D(l) выборки длины алгоритма, полученной в ходе наблюдений за дей-
ствиями оператора в n рабочих циклах. В алгоритмическом смысле
длину l
i
характеризует число вершин в i-й реализации, а в технологи-
ческом – время i-го цикла t
i
или число q
i
переключений исполнитель-
ных устройств за цикл:
1
1
q
i k
k
t
=
= τ
∑
. (1.4)
На практике удобнее использовать данные хронометражных наблюде-
ний, исключив из t
i
составляющие, обусловленные ошибками измере-
ний и функциональными особенностями оператора. Анализ показал,
что выбор критерия сложности в виде выборочной дисперсии D
n
(t),
коэффициента вариации
δ
длины алгоритма
( )
n
D t
t
δ =
, (1.5)
отношения числа вариантов длины алгоритма к числу элементов вы-
борки не позволит сравнивать процессы разной длины и с разным объ-
емом выборки [2].
Пусть в n рабочих циклах получена выборка времени t
1
, t
2
,..., t
n
с дисперсией D
n
(t), состоящая из m ≤ n различных элементов t
i
,..., t
i
+
j
,..., t
m
,
причем этот набор элементов имеет дисперсию D
m
(t). Очевидно, что:
– для простейшего управления, не зависящего от среды,
m = 1; t
1
= t
2
=...= t
m
; D
n
(t)
≅
0; D
m
(t)
≅
0;
– для наиболее сложного управления с изменением среды в каждом
рабочем цикле m = n, t = var, D
n
(t) = D
m
(t);
– чем больше число вариантов времени в выборке (элементов вы-
борки), тем сложнее управление объектом.
14
Тогда критерий сложности можно представить в виде отношения:
(
)
( )
c
.
n
m
D t
K
D t
= (1.6)
Докажем свойства критерия сложности.
1. Для любого процесса 0 ≤ K
c
≤ 1.
Исходя из определения K
c
докажем теорему о том, что величина
дисперсии D
n
(t) выборки случайных величин не превышает дисперсии
D
m
(t) элементов выборки. По определению дисперсии:
( )
(
)
(
)
(
)
2 2 2
1 1 2 2
1 2
...
... 1
n n n
m m
n
m
t t n t t n t t n
D t
n n n
− + − + + −
=
+ + + −
, (1.7)
( )
(
)
(
)
(
)
2 2 2
1 1 2 2
...
1
m m m
m m
m
t t n t t n t t n
D t
m
− + − + + −
=
−
. (1.8)
Заменив
n
t
в первой формуле на
m
t
, используем свойство минималь-
ности дисперсии:
( )
(
)
(
)
(
)
2 2 2
1 2 2
1 2
...
1
... 1
m m
m m
m
n
m
t t n t t n t t n
D t
n n n
− + − + + −
<
+ + + −
. (1.9)
При n
i
= 1 (i = 1,..., n) правая часть этого неравенства обращается в
D
m
(t), следовательно, D
n
(t) < D
m
(t). Для предельно сложного процесса
n m
t t
=
, поэтому D
n
(t) = D
m
(t).
2. Ввод жесткой последовательности операций в начале или конце
управления не меняет его сложности.
Заменим вершину A
1
на рис. 1.3 цепью вершин с постоянным вре-
менем выполнения T. Тогда для выборки (t
1
+ T), (t
2
+ T),..., (t
n
+ T):
c
( ) ( )
( ) ( )
n n
m m
D t T D t
K
D t T D t
+
= =
+
. (1.10)
3. Сложность управления не зависит от размерности длины реали-
зации алгоритма.
15
При увеличении длины реализации в r раз для выборки rt
1
, rt
2
,..., rt
n
:
2
c
2
( ) ( ) ( )
( ) ( )
( )
n n n
m m
m
D rt r D t D t
K
D rt D t
r D t
= = =
. (1.11)
Такой метод оценки позволяет выбрать дискретные процессы
управления, наиболее подготовленные к автоматизации, распределить
функции между оператором и системой управления объектом.
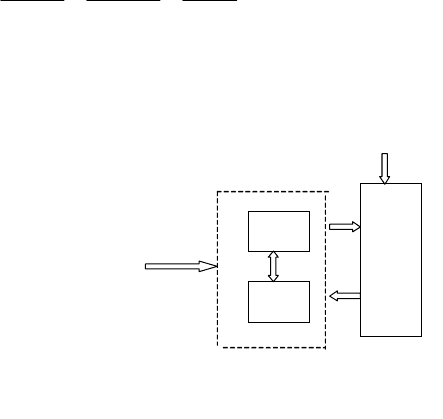
Процесс управления объектом
представим как взаимодействие сис-
темы управления (СУ) и объекта
управления (ОУ) (рис. 1.4). Система
управления в соответствии с задан-
ной программой, состоянием S тех-
нологической среды и информацией
Z с датчиков на объекте вырабатыва-
ет сигналы Y управления механизма-
ми объекта. При этом на объект дей-
ствуют случайные воздействия Е со
стороны технологической среды, из-
меняющие состояние объекта.
В соответствии с делением объ-
ектов управления на непрерывные и
дискретные разделим систему управления на систему автоматического
регулирования (САР) и управляющее логическое устройство (УЛУ).
Система автоматического регулирования обеспечивает слежение вы-
ходной величины за изменением входной величины при случайных
воздействиях (Е) среды на объект. Управляющее логическое устройст-
во переключает исполнительные устройства объекта по заданному
алгоритму и сигналам датчиков.
1.2. МОДЕЛЬ ОБЪЕКТА В НЕПРЕРЫВНОМ
ПРОИЗВОДСТВЕ
При автоматическом регулировании температуры, давления, уров-
ня, расхода и других непрерывных величин требуется знать пере-
даточные функции объекта управления и реализовать устойчивое
к внешним воздействиям изменение управляющих сигналов.
Для непрерывных систем существует три способа автоматического
регулирования: разомкнутое, с компенсацией возмущений, по откло-
нению. Рассмотрим их на примере обогрева некоторого помещения
(рис. 1.5).
Рис. 1.4.
Взаимодействие сист
е
мы
и объекта управления
САР
УЛУ
О У
Е
Y
S
Z
СУ

16
При разомкнутом регулировании фиксируют положение регулято-
ра нагрева и нагреватель начинает обогревать помещение (рис. 1.5, а).
Температура внутри помещения зависит не только от работы нагрева-
теля, но и от температуры снаружи помещения, а также от множества
других факторов. Если все они не меняются, то удается достичь нуж-
ной температуры внутри помещения. При этом следует учитывать ди-
намику нагрева помещения, зависящую от его конструкции и наруж-
ной температуры. Разомкнутое регулирование редко применяют при
автоматизации, так как поведение реальных объектов зависит от мно-
гих факторов.
Регулятор
нагрева
Нагреватель
Помещение
Наружная
температура
а
Регулятор
нагрева
Нагреватель
Помещение
Наружная
температура
б
Регулятор
нагрева
Нагреватель
Помещение
Наружная
температура
Внутренняя
температура
в
Рис. 1.5. Способы регулирования в непрерывном производстве:
а – разомкнутое; б – с компенсацией возмущений; в – по отклонению
При регулировании с компенсацией возмущений регулятор нагрева
изменяет свое положение в зависимости от измерения температуры
снаружи помещения (рис. 1.5, б). Благодаря этому температура внутри
помещения не зависит от наружной температуры. Однако на нее влия-
ют другие возмущающие факторы, такие как направление ветра или
наличие щелей. Все возмущения трудно измерить и подать на вход ре-
гулятора. Из-за этого регулирование с компенсацией возмущений
применяют при ограниченном числе возмущений.
17
Влияние множества возмущающих факторов на температуру внут-
ри помещения можно компенсировать проще: измерив эту температу-
ру и подав полученную величину на регулятор нагрева, который со-
поставит ее с той температурой, которая задана для данного помеще-
ния (рис.1.5, в). Нагреватель будет работать в зависимости от разности
заданной и фактической температур. Чем больше разность, тем больше
будет интенсивность нагрева. Регулирование по отклонению или регу-
лирование с обратной связью стало основным способом регулирования
при автоматизации.
Для регулирования выходной величины объекта управления не-
обходимо найти динамическую связь входа объекта с его выходом
или передаточную функцию объекта регулирования. Передаточная
функция системы автоматического регулирования положения, ско-
рости и ускорения механических элементов должна быть согласова-
на с передаточной функцией объекта управления так, чтобы при пере-
ходе от одного положения элемента к другому не было колебаний.
t
U
,
V
U
V
U
(
t
)
V(t)
W
(
p
)
V
(
p
)
U
(
p
)
1
)
(
)
(
)
(
+
=
=
Tp
K
p
U
p
V
p
W
t
1
Т
р
+ 1
а б в
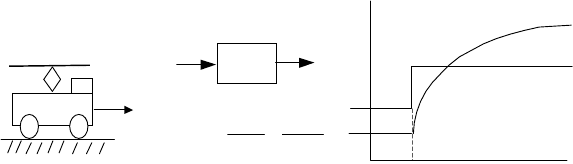
Рис. 1.6. Автоматически управляемая тележка:
а – объект управления; б – передаточная функция; в – переходная функция
Крайним случаем несогласованности связи системы управления с объ-
ектом является возрастание амплитуды колебаний до разрушения ме-
ханической конструкции объекта. Существует шесть типовых динами-
ческих звеньев автоматического регулирования: усилительное, апе-
риодическое, интегрирующее, дифференцирующее, колебательное и
запаздывающее. На рис. 1.6 показаны передаточная и переходная
функции апериодического звена, которым описывают многие объекты
регулирования.
Таким объектом может быть автоматически управляемая тележка
(рис. 1.6, а), входом которой является напряжение на тяговом двигате-
ле U(t), а выходом – скорость движения V(t). При ступенчатом повы-
шении напряжения скорость тележки экспоненциально увеличивается
18
до установившегося значения. Этот процесс называют переходной
функцией. Параметрами передаточной функции в данном случае яв-
ляются коэффициент передачи K и постоянная времени Т. Коэффици-
ент передачи показывает отношение выходной величины к входной в
установившемся режиме или после изменений на входе и выходе объ-
екта. Постоянная времени характеризует инерционные свойства объек-
та или скорость перехода от одного состояния к другому.
При согласовании с объектом передаточную функцию системы ре-
гулирования можно изменить в отличие от не подлежащей изменениям
передаточной функции объекта регулирования. Поэтому главной зада-
чей специалиста по автоматизации непрерывного производства являет-
ся построение статических и динамических характеристик объекта ре-
гулирования в виде передаточных функций. Структура и параметры
передаточной функции могут быть получены с помощью аналитиче-
ского или экспериментального методов идентификации объектов
управления.
Аналитический метод основан на описании поведения объекта
дифференциальными уравнениями. В них выделяют входные и выход-
ные переменные, между которыми устанавливают аналитическую
связь, получают ее изображение по Лапласу и строят модель объекта
как соединение типовых динамических звеньев. Часто объекты управ-
ления настолько сложны, что не удается составить дифференциальные
уравнения и определить коэффициенты в уравнениях. Поэтому в по-
следнее время развиваются экспериментальные методы, позволяющие
построить передаточную функцию реального объекта по его реакции
на внешние воздействия. Экспериментальные методы делят на актив-
ные и пассивные.
Активные методы основаны на приложении к одному входу объек-
та типового воздействия с одновременной фиксацией изменений выхо-
дов. При этом состояние остальных входов не должно изменяться. Ак-
тивные методы применяют для простых объектов с управляемыми
входами, допускающими по технологическим условиям ввод воздей-
ствий, реакция на которые в 5–10 раз больше уровня помехи на выхо-
де. Воздействие может быть ступенчатым, линейно изменяющимся,
импульсным или синусоидальным. Например, запись процесса повы-
шения скорости электродвигателя с постоянной нагрузкой при ступен-
чатом увеличении приложенного напряжения позволит определить
передаточную функцию привода по управлению.
В пассивных методах идентификации записывают изменения вхо-
дов и выходов при нормальной эксплуатации объекта. Модель объекта
строят по отношению спектральной и взаимно-спектральной плотно-

19
стей входной и выходной величин. Такие методы применяют для сто-
хастических объектов управления с неуправляемыми входами. Пас-
сивные методы требуют длительных наблюдений и сложной статисти-
ческой обработки. Записывая изменения скорости тележки при ее дви-
жении по неровной поверхности, можно получить передаточную
функцию движителя тележки по путевым возмущениям.
Подбор системы автоматического регулирования для реального
объекта осуществляют по критериям заданного качества переходных
процессов и устойчивости регулирования. Для этого используют из-
вестные методы теории автоматического регулирования.
1.3. МОДЕЛЬ УПРАВЛЕНИЯ ДИСКРЕТНЫМ ОБЪЕКТОМ
С помощью зрения, слуха, осязания, обоняния и вкуса оператор
ручного управления оценивает состояние объекта и перемещает уст-
ройства управления объектом.
а
1
а
2
а
n
Z
1
Z
2
Z
r
Устрой-
ство
управ-
ления
Рис. 1.7. Работа устройства управления
При автоматическом управлении устройство управления перерабаты-
вает сигналы а
1
, а
2
,..., а
n
от n входных датчиков в команды z
1
, z
2
,…, z
r
управления r исполнительными устройствами (рис. 1.7). Обычно а
i
и z
j
могут принимать два значения (0 и 1, включить и отключить, да и нет).
В этом случае устройство управления называют логическим. Для его
синтеза применяют теорию конечных автоматов.
Если выход зависит только от входа, то конечный автомат называ-
ют комбинационным. Если выход зависит не только от входа, но и от
внутреннего состояния q
j
устройства перед изменением входа, то ав-
томат называют последовательностным.
20
Алгоритм работы управляющего логического устройства отобра-
жает связь выходов с входами и задается на автоматном языке. Про-
стейшим автоматным языком являются автоматные таблицы. Для
комбинационного автомата в левой части таблицы (табл. 1.1) указыва-
ют все комбинации состояний датчиков, а в правой – соответствующие
им команды управления исполнительными устройствами.
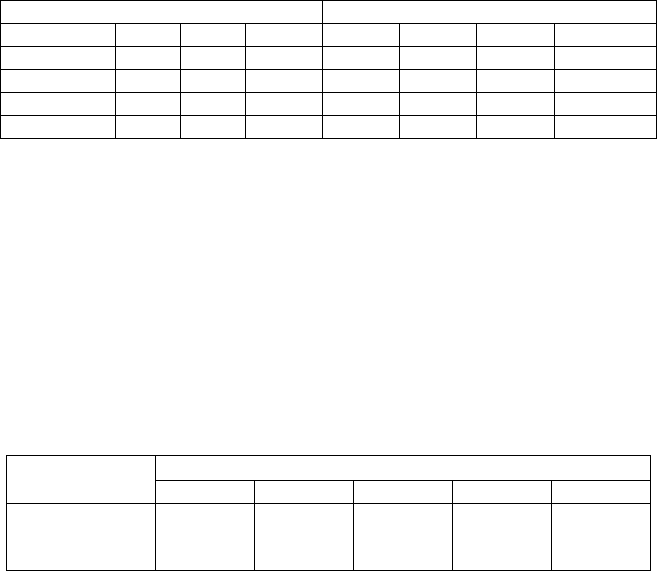
Т а б л и ц а 1.1
Пример таблицы выходов для комбинационного автомата
Входы
Выходы
а
1
а
2
…
а
n
z
1
z
2
…
z
r
0
0
…
0
0
0
…
0
0
0
…
1
1
0
…
0
…
…
…
…
…
…
…
…
1
1
1
1
1
…
0
При n двухпозиционных датчиках таблица содержит 2
n
строк, опи-
сывающих все распознаваемые датчиками состояния объекта. Для r
исполнительных устройств в правой части будут перечислены 2
r
ком-
бинаций команд.
При составлении автоматной таблицы необходимо перебрать все,
даже неиспользуемые, входы для того, чтобы правильно задать алго-
ритм управления. Если выходные сигналы зависят также от предыду-
щих комбинаций входных сигналов, то необходимо составить две таб-
лицы: таблицу переходов из одного внутреннего состояния в другое
(табл. 1.2) и таблицу выходов (табл. 1.3)
Т а б л и ц а 1.2
Пример таблицы переходов для последовательностного автомата
Состояния
Входы
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
S
0
S
1
S
2
S
0
S
0
S
0
S
1
S
1
S
2
S
2
S
2
S
1
S
1
S
0
S
0
S
0
S
2
S
1
В левой части таблицы переходов (см. табл. 1.2) записывают на-
чальные состояния, а в правой – новые состояния, в которые переходит
устройство при подаче некоторого входа. В левой части таблицы вы-
ходов (см. табл. 1.3) записывают состояния устройства, а в правой –
выходы устройства при подаче некоторого входа.